
ШКОЛА MATLAB. Урок 30. Энергетические свойства синхронного магнитоэлектрического генератора постоянного тока
Введение
Генераторная установка с синхронной магнитоэлектрической машиной и активным выпрямителем (СММ-АВ) позволяет построить электрическую сеть постоянного тока с регулируемой мощностью в нагрузке, в которой постоянное напряжение нагрузки при ее изменении поддерживается источником постоянного напряжения совместно с активным выпрямителем. Таким источником может служить аккумулятор, выпрямитель с емким накопителем (суперконденсатор) либо аналогичная мехатронная система с асинхронным или синхронным генератором. В статье рассматривается возможность уменьшения потерь в полупроводниковом преобразователе (АВ) и электрической машине путем регулирования реактивной мощности в контуре СММ-АВ. На практике эти вопросы решаются благодаря успехам в области электромеханики, полупроводниковой и микропроцессорной техники. Наиболее полно возможности повышения энергетической эффективности такой системы обеспечиваются оптимизацией АВ, работающего в режиме управляемого источника тока [2].
Функциональная схема генераторной установки с СММ-АВ
Функциональная схема генераторной установки приведена на рис. 1, где обозначены:
- СММ — синхронная магнитоэлектрическая машина;
- ДПР — датчик положения ротора;
- АВ — активный выпрямитель;
- СУАВ — система управления активным выпрямителем;
- Udc — аккумулятор в цепи нагрузки (RL).

Рис. 1. Функциональная схема генератора с СММ при управлении от источника тока
Система управления активным выпрямителем содержит гистерезисные регуляторы тока с датчиками фазных токов (ДТ) и преобразователи вращающихся координат (d, q) в неподвижные (a, b, c) [10, 12, 14, 16]. Такая схема управления образует замкнутую релейную систему, обеспечивающую токовое управление синхронной магнитоэлектрической машиной [1, 2]. Дальнейшие исследования, описанные ниже, выполнены для лабораторной установки, параметры машины в которой приведены в [6].
Математическое описание генераторной установки с СММ-АВ
Электромагнитные процессы в системе могут быть исследованы на основании эквивалентной схемы замещения, показанной на рис. 2 [5, 6]. В этой схеме замещения АВ на стороне переменного тока представлен управляемым источником напряжения Ū1, который подключен параллельно статорным обмоткам СММ с ЭДС (Ē1). Индуктивное и активное сопротивления в схеме замещения учитывают внутренние параметры машины и активного выпрямителя.

Рис. 2. Схема замещения системы СММ-АВ
Математическое описание системы СММ-АВ осуществляется в синхронно вращающейся системе координат (x, y) с использованием метода обобщенного (результирующего) вектора [2, 10, 16] и метода «гладкой составляющей» [3]. Это математическое описание имеет вид:

где ![]() — пространственный (результирующий) вектор ЭДС на статорных обмотках СММ; Ū1(t) — приведенный к цепи переменного тока пространственный вектор напряжения АВ; Ī(t) — пространственный вектор тока в якоре машины; r, L1 — сопротивление и индуктивность в фазе; x1 = ωL1 — реактивное сопротивление фазы; ω = p ωm — угловая частота напряжения АВ; p — число пар полюсов; ωm — угловая скорость вращения вала машины.
— пространственный (результирующий) вектор ЭДС на статорных обмотках СММ; Ū1(t) — приведенный к цепи переменного тока пространственный вектор напряжения АВ; Ī(t) — пространственный вектор тока в якоре машины; r, L1 — сопротивление и индуктивность в фазе; x1 = ωL1 — реактивное сопротивление фазы; ω = p ωm — угловая частота напряжения АВ; p — число пар полюсов; ωm — угловая скорость вращения вала машины.
Заметим, что запись переменных состояния как функций времени в уравнении (1) подчеркивает то обстоятельство, что эти величины являются постоянными с изменяющимися во времени значениями. Изменение этих значений наблюдается при переходных процессах. В квазиустановившемся режиме система уравнений (1) преобразуется к виду:
![]()
Величина напряжения U1 АВ определяется из известного уравнения [11]:

в котором m — коэффициент модуляции; Udc — напряжение в звене постоянного тока АВ.
Уравнение (3), представляющее собой регулировочную характеристику АВ, остается справедливым при изменении m в диапазоне 0 ≤ m ≤ 1. Дальнейшее возрастание приводит к искажению (насыщению) регулировочной характеристики. Максимальное значение напряжения U1 составляет величину U1 = 0,64 Udc [8].
В матописании СММ (2) переменные состояния являются величинами векторными, что позволяет для исследования электромагнитных и энергетических свойств системы СММ-АВ использовать векторную диаграмму. При построении векторной диаграммы по уравнению (2) электромагнитные процессы в СММ рассматриваются в системе вращающихся координат (d, q), связанных с конструкцией машины [10, 16], а электромагнитные процессы в АВ рассматриваются во вращающейся системе координат x, y и связаны с напряжением и током в нагрузке. При этом вектор потокосцепления ![]() совмещается с нулевым состоянием ДПР и направляется по вещественной оси (d), вращающейся со скоростью системы координат. В этом случае ЭДС вращения Ē1 опережает потокосцепление на 90° эл. и будет направлена по мнимой оси q. Поэтому при построении векторной диаграммы следует в добавление к сказанному учитывать, что направление векторов состояния потокосцепления и ЭДС определяется начальной установкой ДПР.
совмещается с нулевым состоянием ДПР и направляется по вещественной оси (d), вращающейся со скоростью системы координат. В этом случае ЭДС вращения Ē1 опережает потокосцепление на 90° эл. и будет направлена по мнимой оси q. Поэтому при построении векторной диаграммы следует в добавление к сказанному учитывать, что направление векторов состояния потокосцепления и ЭДС определяется начальной установкой ДПР.
Векторная диаграмма отражает физику работы генераторной установки с СММ-АВ и позволяет оценить электромагнитные и энергетические свойства генератора, которые зависят как от параметров самой машины, так и от способа управления активным выпрямителем.
Управление в системе с СММ-АВ синхронизировано с координатами d, q и может быть осуществлено оптимальным с энергетической точки зрения образом [6], при котором реактивная мощность в системе поддерживается равной нулю, а значит, и отсутствуют потери от реактивного тока.
Электромагнитные и энергетические характеристики генераторной установки при управлении АВ по одной (q) координате
Наиболее частым и простым способом управления АВ в системе является управление по одной координате Iq [2, 12]. При этом сигнал на второй вход (рис. 1) не подается (Id = 0). Векторная диаграмма, построенная по уравнению (2) при управлении АВ по одной (q) координате, представлена на рис. 3. Геометрические соотношения векторной диаграммы позволяют рассчитать электромагнитные и энергетические характеристики генераторной установки.

Рис. 3. Векторные диаграммы в системе при управлении АВ по одной (q) координате СММ при управлении от источника тока
При заданных токе и скорости из геометрических соотношений, показанных на рис. 3, находим:

где ![]() — скорость вала СММ; cep — параметры СММ.
— скорость вала СММ; cep — параметры СММ.
Связь между напряжением в звене постоянного тока Udc и напряжением U1 находится из баланса мощностей:
![]()
На рис. 4а приведены зависимости Udc и U1 от тока (при постоянной скорости), рассчитанные по уравнениям (4, 5) при RL = 50 Ом. Поскольку регулирование напряжения U1 при постоянном Udc осуществляется изменением коэффициента модуляции (3), то напряжение U1 может быть только меньше, чем Udc. Из представленных характеристик видно, что при малых токах (в очень малом диапазоне) это условие не соблюдается. На рис. 4б построены зависимости Udc и U1 от скорости (при постоянном токе). Эти характеристики свидетельствуют о неработоспособности системы при скоростях меньших 25 1/c.

Рис. 4. Электромагнитные характеристики в системе при управлении АВ по одной (q) координате
Для полного представления электромагнитных процессов в системе на рис. 5 построены зависимости напряжений от тока и скорости в пространственных координатах.

Рис. 5. Электромагнитные характеристики в системе при управлении АВ в пространственных координатах
Проекции поверхностей рассчитываемых величин на основную плоскость показывают зависимости между током и скоростью, при которых рассчитываемое напряжение постоянно, а также диапазон изменения тока и скорости, при котором это напряжение сохраняется постоянным. Например, при напряжении источника постоянного напряжения, равном Udc = 600 В, система остается работоспособной в диапазоне изменения скорости 40–300 1/c и тока в диапазоне 300–25 А, а для Udc = 1200 В система остается работоспособной в диапазоне изменения скорости от 100 до 300 1/c и тока в пределах 300–90 А.
Зависимости активной и реактивной мощности на выходе генератора от тока, рассчитанные по уравнениям (4), представлены на рис. 6.

Рис. 6. Энергетические характеристики в системе при управлении АВ по одной (q) координате
Аналогично предыдущему, на рис. 7 построены энергетические характеристики системы в пространственных координатах. Проекции поверхностей рассчитываемых величин на основную плоскость показывают зависимости между током и скоростью, при которых соответствующая мощность постоянна.

Рис. 7. Энергетические характеристики в системе при управлении АВ по одной (q) координате
Основные свойства рассмотренной системы сводятся к следующим:
- Реактивная мощность в системе приблизительно равна активной мощности.
- При больших скоростях и токах наблюдается резкое возрастание реактивной (емкостной) мощности, что сопровождается увеличением полного тока и возрастанием потерь в системе.
- Баланс активной мощности в системе поддерживается автоматически: когда СММ генерирует большую мощность, чем требуется нагрузке, «лишняя» энергия подзаряжает аккумулятор. Когда СММ генерирует меньшую мощность, чем требуется нагрузке, «недостающая» энергия потребляется от аккумулятора.
- При скорости менее 50 1/c СММ не может обеспечить генераторный режим установки.
Электромагнитные и энергетические характеристики генераторной установки с СММ-АВ при оптимальном управлении
Если в активном выпрямителе используется токовое управление, то в системе СММ-АВ, управляя по координате q и d, можно поддерживать нулевую реактивную мощность при изменении скорости и нагрузки [6].
Такой режим работы генераторной установки в дальнейшем назван оптимальным. Векторная диаграмма для оптимального режима приведена на рис. 8. Из геометрических соотношений векторной диаграммы можно определить продольную и поперечную составляющие токов, при которых реактивная мощность в нагрузке системы СММ-АВ поддерживается равной нулю.

Рис. 8. Векторная диаграмма для оптимального режима работы в системе
![]()
Расчет энергетических характеристик генератора при оптимальном управлении выполняется по уравнениям, полученным из геометрических соотношений векторной диаграммы:

На рис. 9а,б приведены зависимости Udc и U1 от тока и скорости, рассчитанные по уравнениям (6, 7). Из представленных характеристик видно, что при малых токах и скоростях система СММ-АВ теряет работоспособность.

Рис. 9. Электромагнитные характеристики для оптимального режима работы в системе
На рис. 10 построены зависимости напряжений U1, Udc от тока и скорости в пространственных координатах. По этим характеристикам, так же как в предыдущем случае, определяется при заданном Udc допустимый диапазон изменения скорости и тока нагрузки.
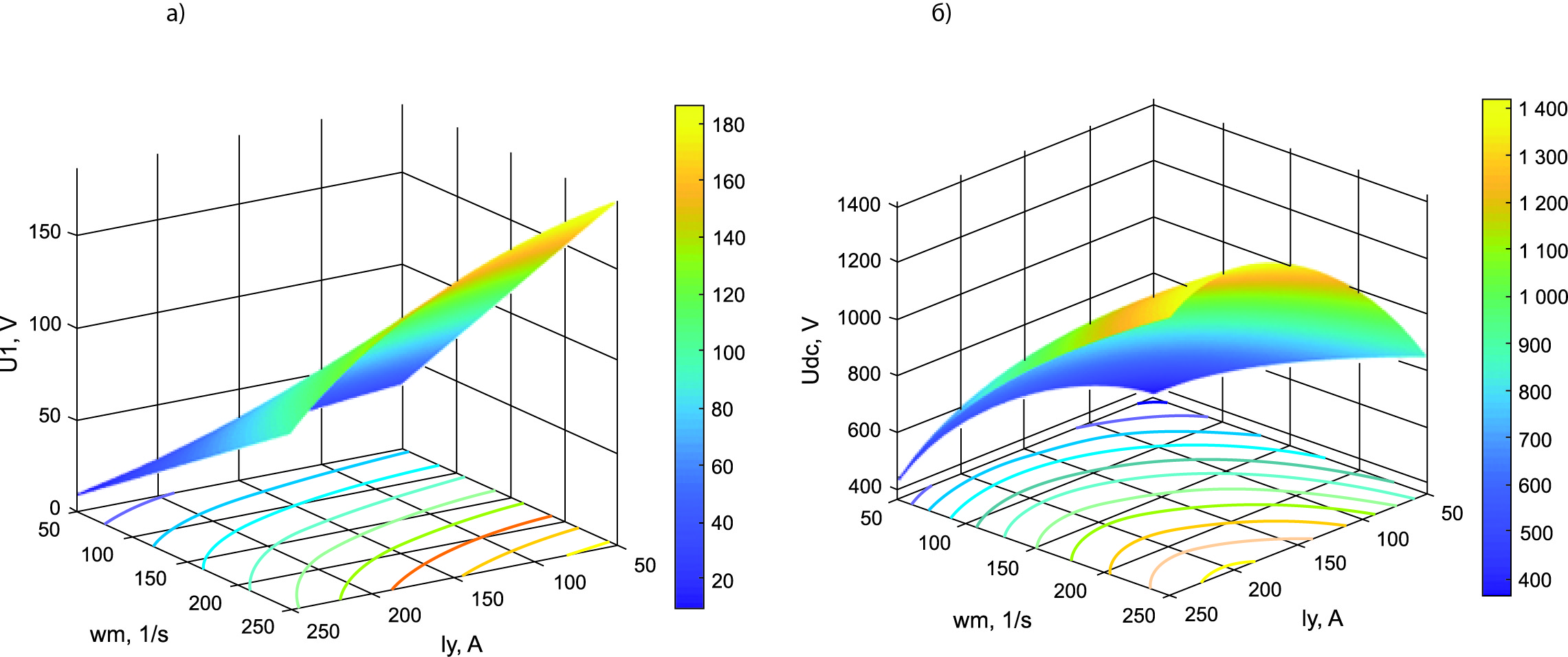
Рис. 10. Электромагнитные характеристики для оптимального режима работы в системе
Аналогично предыдущему, на рис. 11 построены энергетические характеристики системы. В системе с оптимальным управлением реактивная мощность равна нулю, а активная мощность нелинейно зависит от тока. При значительных токах здесь наблюдается уменьшение мощности. Экстремум в зависимостях P1 = f(Iy) с ростом скорости несколько смещается в сторону больших токов.
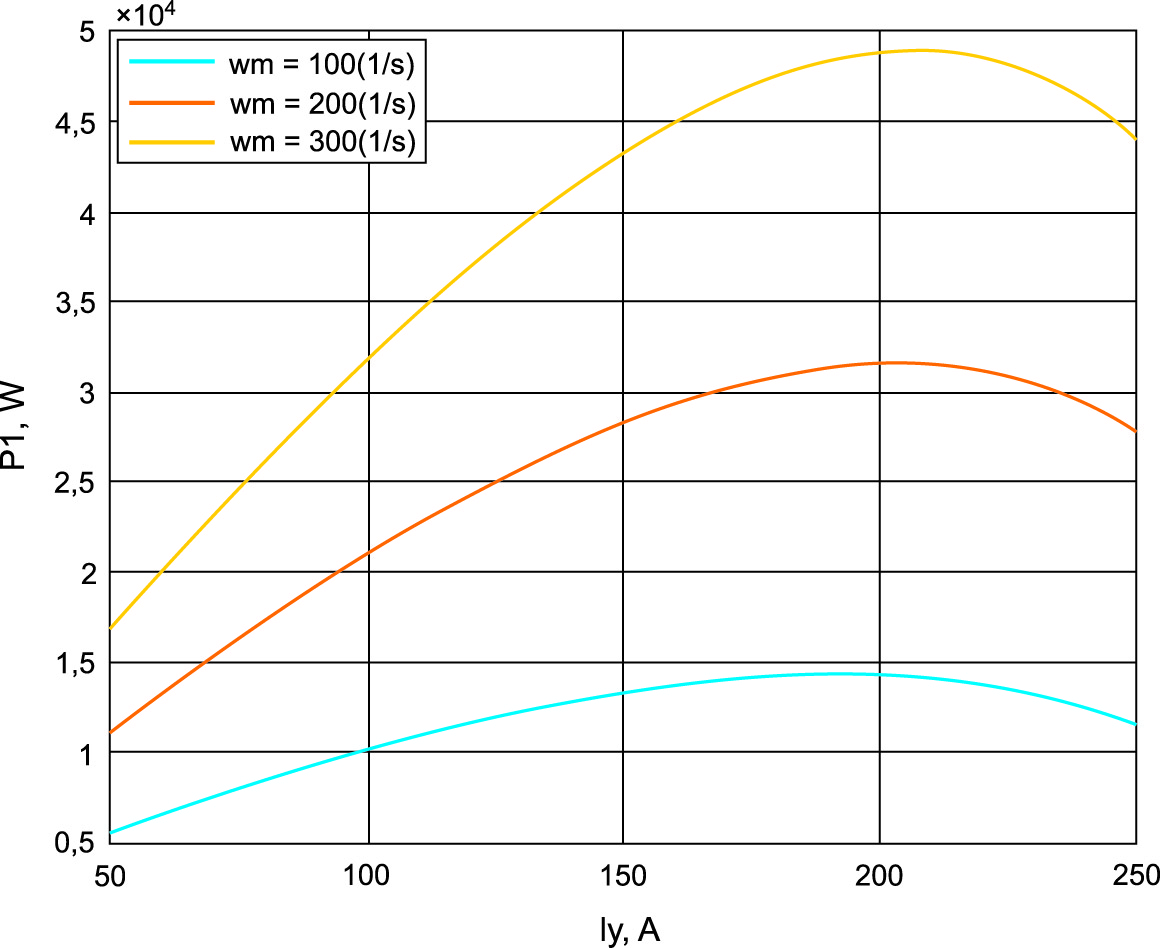
Рис. 11. Энергетические характеристики для оптимального режима работы в системе
На рис. 12 представлены рассчитанные и построенные энергетические характеристики системы в пространственных координатах, из которых следует:
- при управлении АВ в соответствии с уравнениями (6) активная мощность на выходе может поддерживаться постоянной при существенно нелинейной зависимости между током и скоростью вращения вала машины;
- диапазон допустимого изменения тока здесь не превышает (для выбранной СММ) значения 150 А, поскольку дальнейшее увеличение тока не приводит к повышению мощности на выходе генераторной установки.

Рис. 12. Энергетические характеристики для оптимального режима работы в системе
Основные свойства системы с оптимальным управлением сводятся к следующим:
- Реактивная мощность в системе равна нулю во всем диапазоне изменения тока и скорости.
- При постоянной мощности и больших токах рост тока сопровождается увеличением скорости, что соответствует потере статической устойчивости системы.
- На скорости менее 50 1/c СММ не может обеспечить генераторный режим работы установки.
Модельное исследование генераторной установки с СММ-АВ
Модельное исследование генераторной установки с СММ-АВ осуществлено в среде Matlab-Simulink. Модель генератора приведена на рис. 13.

Рис. 13. Модель генераторной установки с СММ-АВ
В функциональных преобразователях f(u) рассчитываются задающие токи I*d, I*q по уравнению (6).
Результаты моделирования позволяют сравнить энергетические характеристики системы с токовым управлением по одной (q) координате (при задании I*d= 0) и с оптимизированным токовым управлением, которое описывается уравнением (6).
Кривые на рис. 14а,б демонстрируют поведение активной и реактивной мощности на выходе системы с управлением по одной координате (I*d= 0): 14a — I*q = var, ωm = const; 14б — I*q = const, ωm = var; в квазиустановившемся режиме работы. В этом случае реактивная мощность в системе составляет приблизительно 80% от активной мощности.

Рис. 14. Энергетические процессы в генераторной установке с СММ-АВ и управлением по одной координате:
a) при линейно нарастающей нагрузке c wm = 300 (1/с);
б) при линейно нарастающей скорости с Iq = –200 A
На рис. 15а,б показаны переходные энергетические процессы в системе при скачкообразном приложении нагрузки и скачкообразном изменении скорости.

Рис. 15. Энергетические процессы в генераторной установке с СММ-АВ при управлении по одной координате:
а) при набросе нагрузки от –20 до –200 А;
б) при набросе скорости 100–300 рад/с
Электромагнитные переходные процессы в системе при скачкообразном приложении нагрузки и изменении скорости показаны на рис. 16а,б.

Рис. 16. Электромагнитные процессы в генераторной установке с СММ-АВ при управлении по одной координате:
а) при набросе нагрузки;
б) при набросе скорости
Качество переходных процессов в рассмотренной генераторной установке значительно лучше, чем в рассмотренной в [6] при пассивной нагрузке АВ.
Аналогичные квазиустановившиеся и переходные процессы в генераторной установке с СММ-АВ при оптимальном управлении представлены на рис. 17а,б; 18а,б и 19а,б.

Рис. 17. Энергетические процессы в генераторной установке с СММ-АВ при оптимальном управлении:
а) при линейно нарастающей нагрузке c ωm = 300 1/с;
б) при линейно нарастающей скорости с Iq = –200 A
Результаты, представленные на рис. 14 и 17а, в точности совпадают с результатами аналитического расчета (рис. 7, 12). Автоколебания в системе с управлением по одной составляющей Iq имеют место в области, где система не обеспечивает выполнение генераторного режима работы (в диапазоне изменения скорости от 0 приблизительно до 60 1/с, рис. 7а,б). В системе с оптимальным управлением (рис. 12) в области малых скоростей ωm = f(Iy) характеристика является статически неустойчивой приблизительно вплоть до 100 1/с, что и подтверждают процессы на рис. 17б, особенно заметные на осциллограмме реактивной мощности.

Рис. 18. Энергетические процессы в генераторной установке с СММ-АВ при оптимальном управлении:
а) при набросе нагрузки от –20 до –200 А и скорости 300 рад/с;
б) при набросе скорости 100–300 рад/с и токе –200 А

Рис. 19. Электромагнитные процессы в генераторной установке с СММ-АВ при оптимальном управлении
а) при набросе нагрузки:
б) при набросе скорости
Заключение
Анализ энергетических характеристик генераторной установки СММ-АВ с параллельно включенным источником на стороне постоянного тока показал, что алгоритм управления АВ оказывает на них существенное влияние. При управлении системой по одной координате реактивная мощность соизмерима с активной мощностью, что увеличивает полный ток, приводящий к возрастанию потерь в системе. При оптимальном управлении значительно уменьшаются потери в СММ и АВ, но несколько ограничивается максимальная выходная мощность генераторной установки.
Особое значение оптимизация энергетических свойств генераторных установок приобретает при построении мощных гибридных транспортных систем и систем полного электродвижения, имеющих различные, сопоставимые по мощности, источники электрической энергии, работающие на одну общую изменяющуюся нагрузку. К примерам таких объектов можно отнести сухопутный, морской, речной и воздушный транспорт, а примерами таких источников электрической энергии служат дизель-генераторы, валогенераторы, паро- и турбогенераторы, аккумуляторы, суперконденсаторы и другие агрегаты.
- Аракелян А. К., Афанасьев А. А. Вентильные электрические машины в системах регулируемых электроприводов. М.: Высшая школа, 2006.
- Бродовский В. Н., Иванов Е. С. Приводы с частотно-токовым управлением. М.: Энергия, 1974.
- Булгаков А. А. Новая теория управляемых выпрямителей. М.: Наука, 1970.
- Васьков А. Г., Тягунов М. Г. Распределенные системы энергоснабжения на основе гибридных энергокомплексов с установками возобновляемой энергетики // Новое в российской электроэнергетике. 2013. № 4.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Урок 24. Мехатронная система с магнитоэлектрическим генератором и активным полупроводниковым выпрямителем // Силовая электроника. 2018. № 1.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Урок 26. Оптимизация энергетических свойств мехатронной системы с вентильной электрической машиной // Силовая электроника. 2018. № 3.
- Глазенко Т. А. Полупроводниковые преобразователи в электроприводах постоянного тока. Л.: Энергия, 1973.
- Забродин Ю. С. Промышленная электроника. М.: Высшая школа, 1982.
- Зотин О. В преддверии возрождения постоянного тока // Силовая электроника. 2013. № 4.
- Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. Пер. с нем. М.-Л.: Госэнергоиздат, 1963.
- Розанов Ю. К. Силовая электроника. М.: Издательский дом МЭИ, 2007.
- Соколовский Г. Г. Электропривод переменного тока с частотным регулированием. М.: ACADEMIA, 2006.
- Соснина Е. Н., Шалухо А. В., Липужин И.А. Simulink-модель ветродизельной электростанции с вставкой постоянного тока. Сборник статей Всеросс. науч.-техн. конф. «Актуальные проблемы электроэнергетики». Нижний Новгород, 2015.
- Токарев Л. Н. Математическое описание, расчет и моделирование физических процессов в судовых электростанциях. Л.: Судостроение, 1980.
- Ясаков Г. С. Корабельные электроэнергетические системы. Часть 1. СПб., Военно-морская академия им. Адмирала Флота Советского Союза Н. Г. Кузнецова, 1999.
- Park R. H. Two-reaction theory of synchronous machines: Generalized method of analysis — part 1 // Transactions of The American Institute of Electrical Engineers. July, 1929.
 26 июня, 2024
26 июня, 2024 6 апреля, 2022
6 апреля, 2022 23 сентября, 2021
23 сентября, 2021