

ШКОЛА MATLAB. Урок 26. Оптимизация энергетических свойств мехатронной системы с вентильной электрической машиной
Введение
Вентильные электрические машины (ВЭМ) широко применяются при построении электроприводов и генераторных установок различного назначения. Особое распространение они получили в робототехнических системах и манипуляторах [1, 2, 4, 5], в разнообразных системах пространственной ориентации [3, 13, 16], в высокоточных станочных системах с ЧПУ [10, 11, 14, 15, 19], в транспортных системах [17], в системах производства электрической энергии [18, 20] и т. д. Максимальные мощности применения ВЭМ составляют десятки мегаватт. При построении мехатронной системы на базе ВЭМ достигнуты высокие энергетические показатели благодаря главным образом применению высокоэнергетических магнитов. Тем не менее анализ проблемы показывает, что в таких системах еще существуют недоиспользованные резервы повышения энергетической эффективности электромеханического преобразования энергии. Это связано с тем, что ВЭМ, в которой, как известно, при определенном управлении можно изменять величину и знак реактивной мощности. Первостепенную актуальность вопросы энергоэффективности таких систем приобретают при построении электроприводов и генераторных установок для автономных, а особенно необитаемых объектов. Наиболее полно возможности повышения эффективности электромеханического преобразования энергии можно обеспечить, оптимизируя режимы работы двигателя при регулировании переменных режима (напряжения или тока на выходе инвертора) как в функции скорости, так и электромагнитного момента.
На практике это осуществляется благодаря успехам в области электромеханики, полупроводниковой и микропроцессорной техники.
В настоящей статье решается задача энергетической оптимизации, реализующая уменьшение потерь в полупроводниковом преобразователе и электрической машине путем регулирования реактивной мощности.
Математическое описание вентильной электрической машины
Функциональная схема ВЭМ хорошо известна [7], она приведена на рис. 1 и содержит: магнитоэлектрическую синхронную машину (МСМ), силовой полупроводниковый преобразователь (СПП) c системой управления (СУ), преобразователь координат (ПК) и датчик положения ротора (ДПР), образующие замкнутую мехатронную систему.

Рис. 1. Функциональная схема ВЭМ
Важно подчеркнуть, что характеристики ВЭМ зависят от всех ее составляющих. Представленные далее исследования осуществлены для ВЭМ производства Рухсервомотор [20], описанной и изученной в составе электропривода опорно-поворотного устройства для оптических комплексов специального назначения [8]. Параметры этой машины приведены в таблице.
|
Параметр |
Номинальный момент в длительном режиме работы, Нм |
Номинальная скорость вращения, рад/с |
Сопротивление обмотки якоря, Ом |
Индуктивность обмотки якоря, Гн |
Постоянная по ЭДС, Вс/рад |
Число пар полюсов |
Момент инерции ротора, кгм2 |
Число фаз |
Напряжение в звене постоянного тока, В |
|
Значение |
670 |
9,73 |
1,83 |
0,0264 |
0,911 |
48 |
0,92 |
3 |
600 |
Математическое описание ВЭМ осуществляется в синхронно вращающейся системе координат с использованием метода обобщенного (результирующего) вектора [9] и метода «гладкой составляющей» [6]. Это математическое описание имеет вид [7]:

В уравнениях (1) Ū1(t), Ī1(t), ‾Ψ0(t) — результирующие векторы напряжения якоря, тока якоря и потокосцеплениe поля возбуждения; r1, L1 — сопротивление и индуктивность фазной обмотки якоря; ω — угловая частота синусоидальных переменных состояния в машине; ωm = ω/p — угловая скорость вращения ротора; p — число пар полюсов; Te, TL — электромагнитный момент и момент нагрузки; J — момент инерции на валу машины. Заметим, что запись переменных состояния как функций времени в уравнениях (1) подчеркивает то обстоятельство, что эти величины являются постоянными с изменяющимися во времени значениями. Изменение значений токов, напряжения, потокосцепления и скорости наблюдается во время переходных процессов. В квазиустановившемся режиме система уравнений (1) преобразуется к виду:

где Ū1, Ī1, Ψ0, Ē1 — квазиустановившиеся электромагнитные переменные состояния, соответствующие амплитудным фазным значениям; Ē1 = j Ψ0ω — ЭДС вращения в фазе; x1 = ωL1 = pωmL1 — индуктивное сопротивление фазы статорной обмотки, зависящее от скорости вращения вала двигателя.
В отличие от матописания машины постоянного тока (МПТ), где переменные состояния являются величинами скалярными, в матописании ВЭМ переменные состояния представляют собой величины векторные, что позволяет для оценки энергетических свойств ВЭМ использовать векторную диаграмму. При построении векторной диаграммы по уравнению (2) вектор потокосцепления Ψ0 совмещается с нулевым состоянием ДПР и направляется по вещественной оси (d), вращающейся со скоростью ω системы координат. В этом случае ЭДС вращения Ē1 = j Ψ0ω опережает потокосцепление на 90 электрических градусов и будет направлена по мнимой оси q. Поэтому при построении векторной диаграммы следует в добавление к сказанному учитывать, что направление одного из векторов состояния (напряжения или тока на выходе СПП) определяется начальной установкой ДПР.
Векторная диаграмма отражает физику работы ВЭМ и позволяет качественно оценить ее свойства, которые зависят как от параметров самого магнитоэлектрического синхронного двигателя, так и от способа построения и алгоритма управления полупроводникового преобразователя.
Математическое описание и электромеханические характеристики ВЭМ при амплитудном управлении от источника напряжения
Ниже рассматривается ВЭМ, где силовым преобразователем является автономный инвертор, выполняющий функцию регулируемого источника напряжения, при двух алгоритмах управления: амплитудном и амплитудно-фазовом.
При амплитудном управлении результирующий вектор Ū1 изменяется только по величине, оставаясь совмещенным с осью q Ū1 = Uq системы координат (рис. 2). В реальных системах амплитудное управление реализовано способом широтно-импульсной модуляции (PWM — pulse wide modulation). При этом амплитуда вектора U1 определяется выражением [12]:

Рис. 2. Векторные диаграммы ВЭМ при амплитудном управлении от источника напряжения в двигательном и генераторном режимах
![]()
в котором m — коэффициент модуляции, изменяемый в диапазоне 0 ≤ m ≤ 1; Udc— постоянное напряжение питания СПП.
Основываясь на векторных диаграммах (рис. 2), можно выделить некоторые особенности работы ВЭМ при данном способе управления:
- Двигательный режим работы ВЭМ имеет место при U1 > E1 точно так, как в МПТ.
- Генераторный режим работы ВД имеет место при U1< E1 точно так, как в МПТ.
- В двигательном режиме в контуре «СПП-машина» протекает положительный (индуктивный) ток.
- В генераторном режиме в контуре «СПП-машина» протекает отрицательный (емкостный) ток.
Электромеханические и энергетические характеристики ВЭМ при амплитудном управлении от источника напряжения рассчитываются по уравнениям (2) при разложении переменных состояния на вещественные и мнимые части в системе координат d, q:

Из уравнений (4) находятся токи продольной и поперечной составляющей и электромагнитный момент:


где z = √r12 + x12 — полное сопротивление статорной цепи.
После определения токов продольной Id и поперечной Iq составляющих основные энергетические характеристики ВЭМ определятся из уравнений:

В уравнениях (7) P1 — активная мощность на выходе СПП; Q1 — реактивная мощность на выходе СПП; Pm — механическая мощность на валу.
На рис. 3 построено семейство механических характеристик ВЭМ при изменении коэффициента модуляции в диапазоне 0–1 по уравнениям (3, 5, 6).

Рис. 3. Семейство механических характеристик ВЭМ при амплитудном управлении от источника напряжения
Анализ полученных результатов показывает:
- Механические характеристики ВЭМ при амплитудном управлении являются нелинейными.
- В области малых моментов механические характеристики ВЭМ подобны характеристикам МПТ с последовательным возбуждением.
- При амплитудном управлении с напряжением питания СПП Udc = 600 В и номинальном моменте скорость на валу приблизительно в два раза меньше номинальной, что исключает возможность (при рассмотренном способе управления СПП) достижения в электроприводе номинальной мощности.
Общий вывод исследования ВЭМ при рассмотренном управлении можно сформулировать следующим образом:
«Для двигателя (табл.) построение реверсивного электропривода с широтно-импульсной модуляцией в СПП не удается использовать всю мощность, на которую спроектирован двигатель».
Математическое описание и электромеханические характеристики ВЭМ при амплитудно-фазовом управлении от источника напряжения
При амплитудно-фазовом управлении изменяется величина вектора U1 (3) и его фаза α, которая отсчитывается от положения вектора противо-ЭДС (от оси q). В реальных системах такой алгоритм управления реализуется методом модуляции пространственного вектора (SVC — space vector control) [12]. Векторные диаграммы ВЭМ в двигательном и генераторном режимах при таком управлении приведены на рис. 4. При амплитудно-фазовом управлении изменяется величина вектора U1 и его фаза α (рис. 3). В реальных системах данный алгоритм управления реализуется методом модуляции пространственного вектора (SVC — space vector control). Напряжение на выходе инвертора при таком управлении равно:

где m — коэффициент модуляции, изменяемый в диапазоне 0 ≤ m ≤ 1; α — фаза модуляции (фаза между вектором напряжения Ū1 и вектором –E1); Udc — постоянное напряжение питания СПП.

Рис. 4. Векторные диаграммы ВЭМ при амплитудно-фазовом управлении от источника напряжения в двигательном и генераторном режимах
Математическое описание ВЭМ в установившемся режиме работы может быть представлено в виде:

Токи продольной, поперечной составляющей в двигателе определятся из уравнений:

Электромагнитный момент в квазиустановившемся режиме равен:

Предельные механические характеристики (для m = 1), рассчитанные по уравнениям (8, 10, 11), приведены на рис. 5.

Рис. 5. Семейство предельных (m = 1) механических характеристик двигателя при изменении фазы модуляции от -1 рад до 1 рад
Анализ полученных результатов показывает:
- Механические характеристики ВЭМ при амплитудно-фазовом управлении являются нелинейными, что существенно отличает вентильный двигатель от двигателя постоянного тока.
- Двигательный режим работы ВЭМ при амплитудно-фазовом управлении имеет место при α >0.
- Генераторный режим работы ВЭМ при амплитудно-фазовом управлении имеет место при α< 0.
- В области малых моментов механические характеристики ВЭМ подобны характеристикам МПТ с последовательным возбуждением, в этой области в двигательном и генераторном режимах машина ведет себя как источник момента.
- При больших моментах в обоих режимах наблюдаются области неустойчивой работы, что требует принятия специальных мер при построении электропривода, работающего на изменяющуюся нагрузку.
- При амплитудно-фазовом управлении момент, скорость и мощность на валу машины соответствуют расчетным, что подтверждает целесообразность использования рассмотренного способа управления СПП для построения электропривода.
Энергетические характеристики электропривода с рассмотренным управлением с учетом (9, 10, 11) рассчитываются по уравнениям:

На рис. 6 и 7 приведены результаты расчета энергетических характеристик электропривода с ВЭМ, которые представлены зависимостями активной и реактивной мощности в контуре «СПП-машина» от управляющих воздействий. Проекции поверхности мощности на основную плоскость представляют зависимости между управляющими сигналами, при которых мощность постоянна.
Основные особенности энергетических характеристик системы заключаются в следующем:
- реактивная мощность в контуре «СПП-машина» соизмерима с активной мощностью, что вызывает увеличение полного тока и потерь в полупроводниковых приборах СПП и обмотках машины;
- поддержание реактивной мощности в контуре «СПП-машина» равной нулю требует поддержания определенной (нелинейной) зависимости между коэффициентом модуляции и фазой модуляции.
Исследование энергетических характеристик оптимизированного электропривода с ВЭМ при амплитудно-фазовом управлении от источника напряжения
Характеристики, приведенные на рис. 6 и 7, свидетельствуют о том, что реактивная мощность в контуре «СПП-машина» может поддерживаться равной нулю. В связи с чем возникает вопрос о нахождении этих зависимостей между сигналами управления электроприводом.

Рис. 6. Активная мощность в контуре «СПП-ВЭМ» при амплитудно-фазовом управлении от инвертора напряжения

Рис. 7. Реактивная мощность в контуре «СПП-ВЭМ» при амплитудно-фазовом управлении от инвертора напряжения
Положительный ответ на поставленный вопрос дает совместное решение уравнений (10, 12), что позволяет определить зависимости между напряжением, углом управления и угловой скоростью вала двигателя, при которых реактивная мощность в контуре «СПП-машина» электропривода будет равна нулю. Это решение имеет вид:

Векторные диаграммы, демонстрирующие режимы работы системы при нулевой реактивной мощности в контуре «СПП-машина», показаны на рис. 8.

Рис. 8. Векторные диаграммы в системе в двигательном и генераторном режимах при нулевой реактивной мощности в контуре «СПП-машина» и управлении от инвертора напряжения
Из уравнений (9, 13) можно определить продольную и поперечную составляющие напряжения при нулевой реактивной мощности в контуре «СПП-машина»:

При поддержании соотношения (14) по уравнениям (12) рассчитываются оптимизированные энергетические характеристики электропривода с ВЭМ при амплитудно-фазовом управлении. Эти характеристики приведены на рис. 9 и 10.

Рис. 9. Активная мощность оптимизированного электропривода в контуре «СПП-ВЭМ» при амплитудно-фазовом управлении от инвертора напряжения

Рис. 10. Реактивная мощность оптимизированного электропривода в контуре «СПП-ВЭМ» при амплитудно-фазовом управлении от инвертора напряжения
Энергетические характеристики (рис. 10) свидетельствуют о том, что при поддержании зависимости (14) реактивная мощность в контуре «СПП-машина» равна нулю во всем диапазоне изменения управляющих сигналов.
Исследование энергетических характеристик генератора с ВЭМ при амплитудно-фазовом управлении от источника тока
Если в силовом полупроводниковом преобразователе используется токовое управление, то сигналами управления являются токи Id и Iq, а продольная и поперечная составляющие напряжения определяются из уравнений:

Энергетические характеристики ВЭМ с рассмотренным управлением рассчитываются по уравнениям (12).
На рис. 11 и 12 показаны результаты расчета энергетических характеристик ВЭМ, которые представлены зависимостями активной и реактивной мощности в контуре «СПП-машина» от управляющих сигналов. Проекции поверхности мощности на основную плоскость представляют зависимости между этими управляющими сигналами, при которых мощность постоянна. Зависимость между управляющими сигналами, при которых реактивная мощность равна нулю, лежит в области отрицательных токов Id (рис. 8) и представляет собой кривую, близко соответствующую гиперболе.

Рис. 11. Активная мощность в контуре «СПП-ВЭМ» при амплитудно-фазовом управлении от инвертора тока

Рис. 12. Реактивная мощность в контуре «СПП-ВЭМ» при амплитудно-фазовом управлении от инвертора тока
Главные особенности энергетических характеристик системы при токовом управлении состоят в следующем:
- реактивная мощность в контуре «СПП-машина» соизмерима с активной мощностью, что вызывает увеличение полного тока и потерь в полупроводниковых приборах СПП и обмотках двигателя;
- при определенной зависимости между сигналами задания реактивная мощность в контуре «СПП-машина» остается равной нулю.
Исследование энергетических характеристик оптимизированного электропривода с ВЭМ при амплитудно-фазовом управлении от источника тока
Если в силовом полупроводниковом преобразователе используется токовое управление, то аналогично предыдущему можно определить продольную и поперечную составляющие тока, при которых реактивная мощность в контуре «СПП-машина» равна нулю:
При поддержании соотношения (16) по уравнениям (12) рассчитываются оптимизированные энергетические характеристики электропривода с ВЭМ при управлении от источника тока. Эти характеристики для двигательного режима работы электропривода приведены на рис. 13 и 14.

Рис. 13. Активная мощность оптимизированного электропривода в контуре «СПП-ВЭМ» при амплитудно-фазовом управлении от инвертора тока

Рис. 14. Реактивная мощность оптимизированного электропривода в контуре «СПП-ВЭМ» при амплитудно-фазовом управлении от инвертора тока
Энергетические характеристики (рис.14) свидетельствуют о том, что реактивная мощность в контуре «СПП-машина» равна нулю во всем диапазоне изменения управляющих сигналов.
Модельное исследование электропривода с ВЭМ
Экспериментальное исследование замкнутого по скорости электропривода с ВЭМ осуществлено в среде Matlab-Simulink. За основу взята структура с токовыми контурами. Модель электропривода приведена на рис. 15.
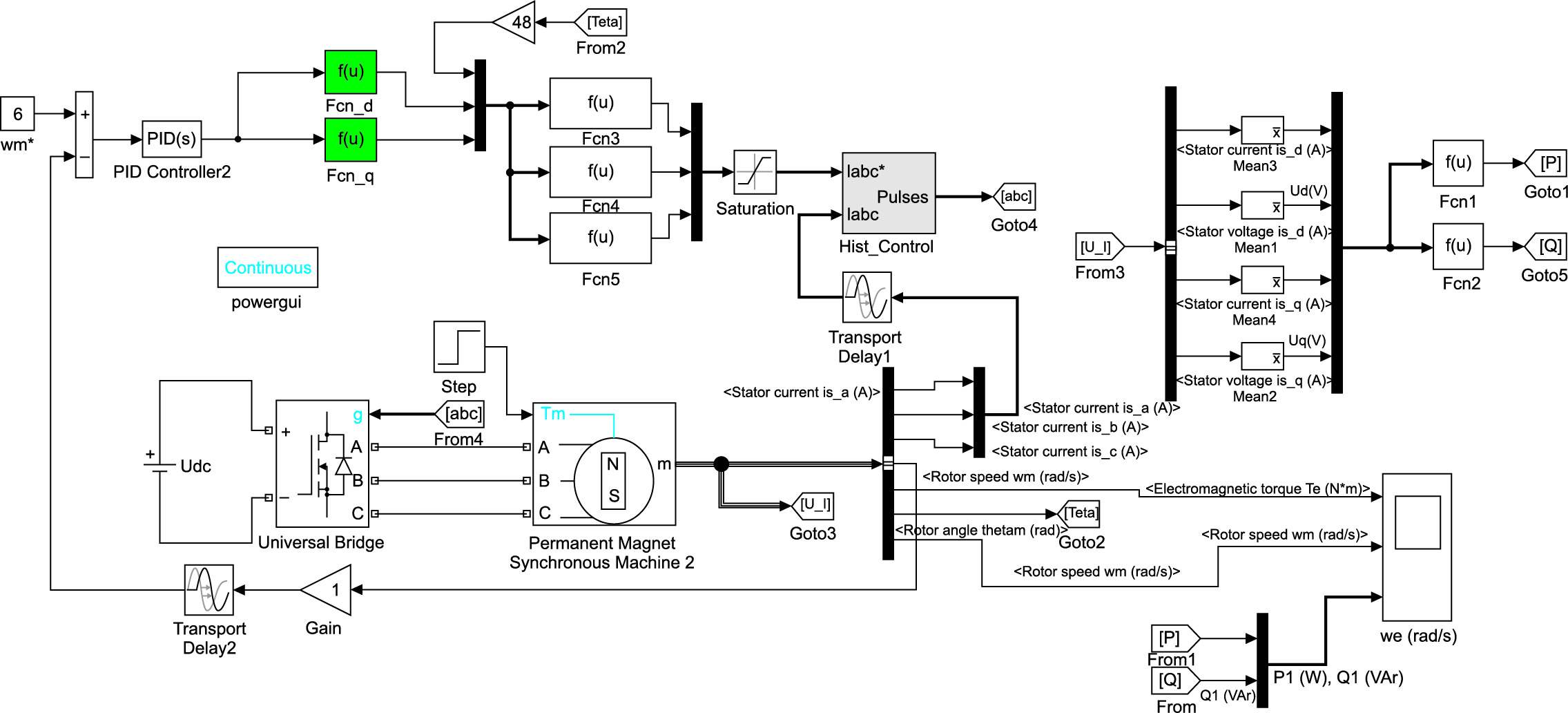
Рис. 15. Виртуальная модель вентильного электропривода, оптимизированного по энергетическим показателям
В блоке Hist_Control реализована релейная отрицательная обратная связь по току, обеспечивающая токовое управление ВЭМ.
Проведено исследование момента, скорости, активной и реактивной мощности в установившихся и переходных режимах работы для модели классического и оптимизированного электропривода.
На рис. 16 и 17 представлены результаты моделирования системы в установившихся (генераторный под нагрузкой, двигательный под нагрузкой) режимах работы и переходном (переключение с генераторного на двигательный) режиме работы в замкнутом электроприводе. Кривые (рис. 16) демонстрируют поведение момента, скорости и реактивной мощности в контуре «СПП-машина» классического электропривода, в котором токовый сигнал Iq формируется на выходе регулятора скорости (блок PID Controller), а токовый сигнал Id задается равным нулю.

Рис. 16. Характеристики классического электропривода с ВЭМ
В оптимизированном электроприводе добавлены два функциональных блока (Fcn_d, Fcn_q), выделенные на рис. 15 зеленым цветом. В этих функциональных блоках реализованы уравнения (16).
В классическом электроприводе в установившемся режиме реактивная мощность в контуре «СПП-машина» составляет примерно треть от активной мощности (рис. 16).
В оптимизированном электроприводе при изменении нагрузки реактивная мощность в контуре «СПП-машина» остается равной нулю и в двигательном, и в генераторном режимах и не зависит от момента и заданной скорости (рис. 17).
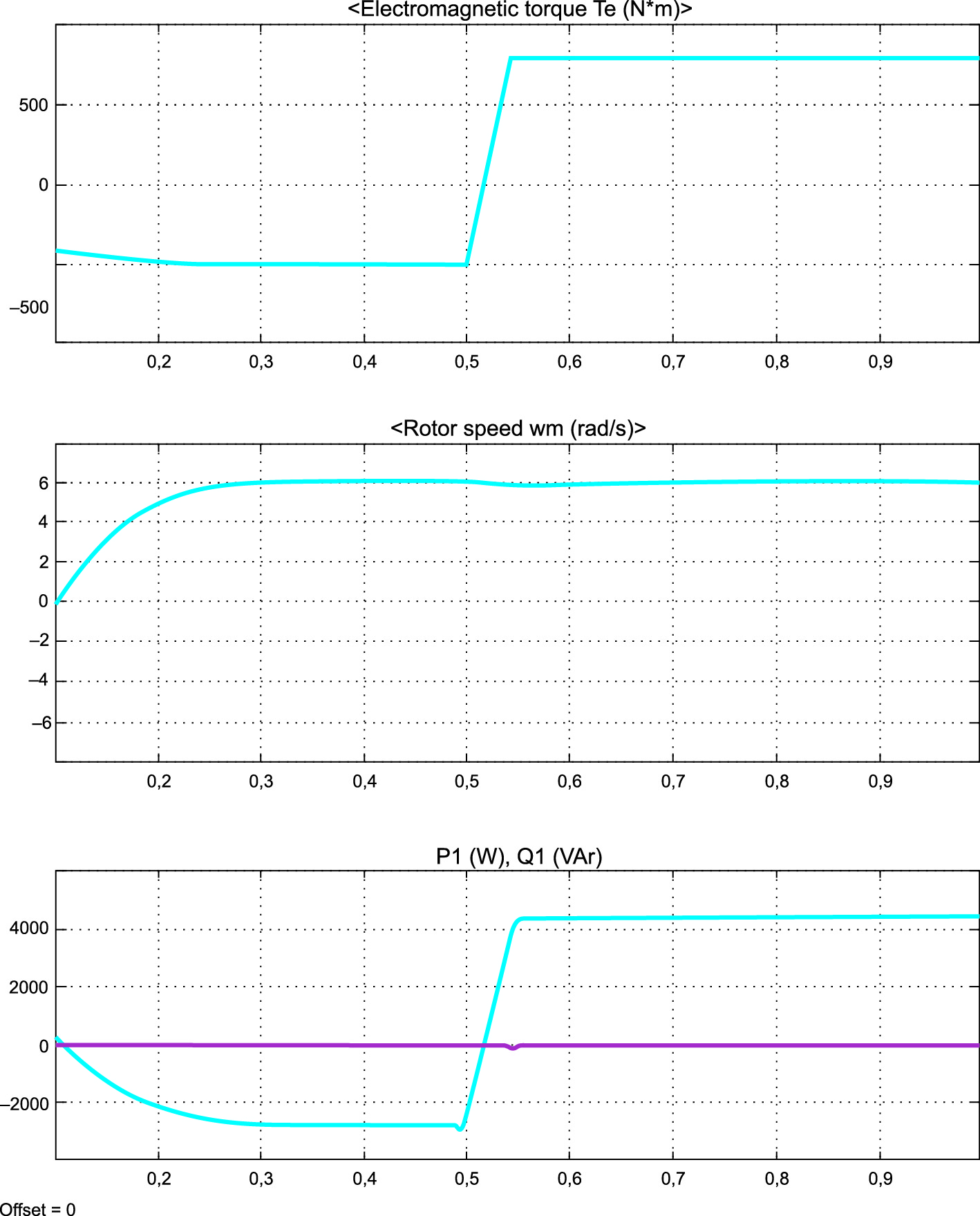
Рис. 17. Характеристики оптимизированного электропривода с ВЭМ
Отклонение реактивной мощности от нуля во время переходного процесса в оптимизированном электроприводе зависит от скорости изменения момента. Для скорости изменения момента, равной 24 000 Нм/с, принятой в модельном эксперименте, это отклонение практически равно нулю (рис. 17).
Заключение
Анализ статических характеристик электропривода с ВЭМ показал, что алгоритм управления СПП оказывает существенное влияние на его энергетические характеристики. При определенном соотношении между амплитудой и фазой напряжения (тока) на выходе СПП можно в несколько раз уменьшить токи и потери в преобразователе и двигателе. Особое значение оптимизация энергетических свойств электропривода приобретает при построении мощных гибридных транспортных систем и систем полного электродвижения.
- Аракелян А. К., Афанасьев А.А. Вентильные электрические машины в системах регулируемых электроприводов. М.: Высшая школа, 2006.
- Балковой А. П., Цацекин В. К. Прецизионный электропривод с вентильными двигателями. М.: Издательский дом МЭИ, 2010.
- Баранов М. В., Корчагин О. А. Высокомоментный мехатронный модуль привода телескопа. Вестник МГТУ им. Н. Э. Баумана. Сер. «Машиностроение», 2012.
- Беленький Ю. М., Микеров А. Г. Выбор и программирование параметров бесконтактного моментного привода. Л., ЛДНТП, 1990.
- Бродовский В. Н., Иванов Е. С. Приводы с частотно-токовым управлением. М.: Энергия, 1974.
- Булгаков А. А. Новая теория управляемых выпрямителей. М.: Наука, 1970.
- Герман-Галкин С. Г.Matlab — Simulink. Проектирование мехатронных систем. СПб. Корона-Век, 2008.
- Герман-Галкин С. Г. Модельное исследование энергетических характеристик вентильного электропривода пространственной стабилизации опорно-поворотного устройства // Техническая электродинамика. 2011. № 1.
- Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. Пер. с нем. М.-Л., Госэнергоиздат, 1963.
- Овчинников И. Е. Вентильные электрические двигатели и привод на их основе (малая и средняя мощность). Курс лекций. СПб. Корона-Век, 2006.
- Панкратов В. В. Вентильный электропривод от стиральной машины до металлорежущего станка и электровоза // Электронные компоненты. 2007. № 2.
- Розанов Ю. К. Силовая электроника. М.: Издательский дом МЭИ, 2007.
- Садовников М. А., Томасов В. С., Толмачев В. А. Прецизионный электропривод для оптических комплексов контроля космического пространства // Известия вузов. Приборостроение. 2011. № 6 (54).
- Соколовский Г. Г. Электроприводы переменного тока с частотным управлением. М.: Академия, 2006.
- Слежановский О. В., Дацковский Л. Х., Кузнецов И. С., Лебедев Е. Д., Тарасенко Л. М. Системы подчиненного регулирования электроприводов переменного тока с вентильными преобразователями. М.: Энергоатомиздат, 1983.
- Томасов В. С., Толмачев В. А., Дроздов В. Н., Денисов К. М., Гурьянов А. В. Электроприводы высокоточных оптических комплексов контроля космического пространства. Труды VII Международной (XVIII Всероссийской) конференции по автоматизированному электроприводу АЭП-2012. Иваново, 2012.
- Колпахчьян Г. И., Лебедев А. В., Ефимов Е. М., Парнюк Е. Ю. Тяговый электропривод с микропроцессорной системой управления электровоза ЭП200 при применении усовершенствованных алгоритмов управления // Вестник ВЭлНИИ. 2006. Вып. 1 (50).
- Ясаков Г. С. Корабельные электроэнергетические системы. Часть 1. СПб., Военно-морская академия им. Адмирала Флота Советского Союза Н. Г. Кузнецова, 1999.
- Баранов М. В. и др. Электрические следящие приводы с моментным управлением исполнительными двигателями. Монография. М.: Изд-во МГТУ им. Н. Э. Баумана, 2006.
- www.ruchservomotor.com
 4 декабря, 2020
4 декабря, 2020 4 сентября, 2020
4 сентября, 2020