
Параллельная работа IGBT при различных способах управления затворами
Введение
Параллельное соединение силовых ключей используется для наращивания мощности в пределах определенного класса напряжения. Оно начинается на «микро-уровне» в чипе, имеющем сотни тысяч IGBT-ячеек, и продолжается в модулях, содержащих несколько параллельных кристаллов. На схемном «макро-уровне» увеличение мощности достигается путем параллельного соединения модулей в фазных стойках преобразователя или готовых инверторов [2].
Максимально эффективное использование IGBT достигается при идеальной статической (в течение периода проводимости) и динамической (в течение цикла коммутации) симметрии токов в параллельных цепях [2]. В данном руководстве анализируются причины нарушения токового баланса и методы его улучшения. Основной акцент делается на оценке влияния способа управления («индивидуальный» или «центральный» драйвер). В статье используются следующие термины и определения:
- Статическое распределение — распределение токов в параллельных полупроводниковых ключах или модулях в течение периода проводимости.
- Динамическое распределение — распределение токов в параллельных полупроводниковых ключах или модулях в течение цикла коммутации.
Факторы, влияющие на симметрию распределения токов
Основные факторы, определяющие симметрию распределения токов в параллельных цепях, приведены в таблице 1.
|
|
Статическое распределение |
Динамическое распределение |
|
|
Полупроводник |
Напряжение насыщения VCEsat = f(iC, VGE, Tj); VF = f(iF, Tj) |
× |
|
|
Передаточная характеристика IC = f(VGE, Tj)gfs; VGE(th) |
|
× |
|
|
Внутренний резистор затвора iC = f(VGE(t)) |
|
× |
|
|
Модуль |
Паразитная индуктивность цепи коммутации Ls |
|
× |
|
Драйвер |
Джиттер |
|
× |
|
Длительность цикла |
|
× |
|
|
Напряжение на затворе iC = f(VGE(t)) |
× |
× |
|
|
Цепь подключения драйвера |
Паразитная индуктивность цепи затвора LsG: iC = f(VGE(t)) |
|
× |
|
Паразитная индуктивность цепи эмиттера LsE: iC = f(VGE(t)) |
|
× |
|
|
Сопротивления затвора iC = f(VGE(t)) |
|
× |
|
|
Взаимные связи цепей подключения эмиттера |
|
× |
|
|
Конструкция инвертора |
Импеданс нагрузки |
× |
|
|
Условия охлаждения IC = f(VGE, Tj)gfs |
× |
|
|
Экспериментальная установка
Исследования распределения токов проводились на фазной сборке, состоящей из четырех параллельных модулей SEMIX603GB12E4p и входящей в состав однофазного инвертора. На рис. 1 показано два варианта управления затворами IGBT — с применением «индивидуальных» драйверов на каждом модуле (слева) и одного «центрального» мощного драйвера c адаптерной платой для всех четырех IGBT (справа).

Рис. 1. Фазная стойка инвертора: параллельные модули с четырьмя «индивидуальными» драйверами (слева) и одним «центральным» драйвером (справа)
Использование первой из этих концепций стало возможным с появлением цифровых устройств управления затвором, имеющих пренебрежимо малый разброс временных характеристик. Примером является новый цифровой драйвер SKYPER 12, разработанный SEMIKRON для управления модулями SEMIX Press-Fit [4] и подключаемый методом прессовой посадки. Выходные каскады каждого из четырех SKYPER 12 соединены с выводами управления одного модуля SEMIX603GB12E4p. Входы объединены на плате адаптера, которая получает сигналы от контроллера верхнего уровня и распределяет их по параллельным каналам.
Классическая концепция «центрального» драйвера реализована с помощью более мощного устройства SKYPER 42LJ и адаптера, предназначенного для соединения его выхода со входами четырех IGBT. На адаптерной плате расположены резисторы цепи управления затворами, а также элементы схемы защиты.
Вид адаптерных плат для двух описанных случаев показан на рис. 2. Цветная маркировка позиций модулей используется для обозначения приведенных далее эпюр.

Рис. 2. Платы адаптера: параллельные модули с индивидуальными драйверами (слева) и одним центральным драйвером (справа)
Методы измерения
Влияние различных факторов на распределение параллельных токов анализировалось двумя различными способами. Метод двойного импульса, или «двухимпульсный тест» (double-pulse test), традиционно применяется многими производителями для оценки динамических характеристик полупроводников. Кроме того, производились измерения режимов работы ключей в инверторном включении, что отображает функционирование полупроводниковых кристаллов и модулей в реальном применении.
«Двухимпульсный» тест
На рис. 3 показана схема «двухимпульсного теста», позволяющего оценить динамические свойства транзистора нижнего плеча ВОТ IGBT (слева) и верхнего плеча ТОР IGBT (в середине). В процессе измерений каждый из транзисторов дважды открывается и закрывается. По окончании первого импульса производится оценка характеристик выключения IGBT, а в начале второго импульса анализируются особенности его включения.

Рис. 3. Схема и эпюры «двухимпульсного теста»
Испытания в «инверторном» режиме
Испытания в «инверторном» режиме проводились с помощью однофазной схемы (H-мост) с индуктивной нагрузкой. В отличие от метода двойного импульса, управление полупроводниковыми ключами в инверторе осуществляется посредством широтно-импульсной модуляции (ШИМ). Температурная зависимость параметров силовых модулей считается дополнительным фактором, влияющим на распределение токов в инверторном режиме.

Рис. 4. Схема и эпюра выходного тока полумостового каскада IAC в «инверторном» режиме
Условия испытаний
Основные характеристики, определяющие условия проведения «двухпульсного» и «инверторного» теста, приведены в таблице 2.
|
Параметр |
2-импульсный тест |
Инверторный тест |
|
Tj, °C |
125 |
– |
|
Tsense, °C |
– |
80 |
|
IC, sum, A |
2400 |
– |
|
IAC, A |
– |
1000 |
|
VCE, В |
600 |
– |
|
VDC, В |
– |
600 |
|
VG(on), В |
15 |
15 |
|
VG(off), В |
–8 |
–8 |
|
fsw, кГц |
– |
3 |
|
Lload, мкГн |
30 (15) |
250 |
Влияние импеданса цепей на распределение токов
Паразитные параметры цепей и элементов системы, а следовательно, и ее механическая конструкция оказывают заметное влияние на распределение токов параллельных модулей. Это обусловлено различиями в импедансах отдельных токовых путей, которые возникают из-за неизбежной асимметрии конструкции. Кроме того, пространственное положение отдельных компонентов относительно друг друга и образующиеся индуктивные связи также влияют на распределение токов.
Оптимизация механического дизайна устройства позволяет существенно снизить воздействие подобных факторов. Чем симметричнее выполнены соединения, тем лучше баланс токов в параллельных цепях.
В данной главе влияние конструкции системы на симметрию токов анализируется независимо от концепции управления затворами. Результаты измерений, приведенные ниже, зависят от индивидуальных свойств драйверов, но они действительны для обоих вариантов подключения схемы управления. Также предполагается, что в параллель соединяются только одинаковые полупроводниковые приборы и модули, имеющие идентичные статические и динамические параметры.
Статическое распределение токов
Ряд параметров оказывает влияние на статическое распределение токов, в том числе индуктивность нагрузки. Для получения наиболее корректных результатов необходимо учесть и разницу прямых напряжений полупроводниковых приборов. Современные транзисторы имеют положительный температурный коэффициент (PTC) прямого напряжения, т. е. величина VCE(sat) повышается с ростом температуры при фиксированном токе (рис. 5). Это способствует улучшению симметрии: температура более нагруженного IGBT с меньшим значением VCE возрастает, в результате чего увеличивается напряжение насыщения, и избыточный ток переносится в параллельные цепи.

Рис. 5. Прямые характеристики VCEsat IGBT (номинальный ток 450 А, слева), прямые характеристики VF диода (номинальный ток 450 А, справа)
Большинство диодов имеет отрицательный температурный коэффициент (NTC) при номинальном токе, в отличие от компонентов с PTC-характеристикой, это приводит к ухудшению баланса токов. В ряде случаев приходится отбирать диоды по величине прямого напряжения VF для использования в параллельных цепях. Разброс статических и динамических характеристик оказывается ниже для чипов из одной партии, поскольку они производятся из аналогичного материала при одинаковых условиях. Поэтому для параллельного соединения целесообразно отбирать модули с одинаковым дата-кодом.
Влияние паразитных индуктивностей описывается с помощью упрощенной эквивалентной схемы, показанной на рис. 6. Она состоит из двух параллельных цепей и источника, генерирующего ток Iload(t). Компоненты Ls1 и Ls2 отображают общую паразитную индуктивность цепи, R1 и R2 — сумму омических сопротивлений.

Рис. 6. Эквивалентная схема двух параллельных токовых цепей
При анализе распределения токов в параллельных цепях использованы следующие допущения:
- Скорость нарастания тока dIload/dt является постоянной во время периода проводимости IGBT и определяется параметрами источника тока V1.
- Влияние омических сопротивлений на распределение тока незначительно: R1 = R2 = R.
- Ток нагрузки Iload(t) равен нулю на период времени t ≤ 0 [3].

Эти выражения показывают, что токовый делитель, образованный паразитными индуктивностями, определяет асимметрию токов при t<<t. С увеличением времени до t>>t токи в двух параллельных ветвях «расходятся» на DI относительно среднего значения Iload(t)/2. Величина DI зависит от разницы индуктивностей Ls1–Ls2, суммы омических сопротивлений и скорости изменения тока dIload/dt. В реальных применениях время нарастания тока определяется, прежде всего, напряжением на шине постоянного тока и индуктивностью нагрузки.
Паразитные индуктивности
Графики на рис. 7 демонстрируют влияние паразитных индуктивностей на статическое распределение токов. Оба измерения проводились при одинаковых условиях, за исключением положения кабеля, соединяющего нагрузку с выходом инвертора. Рисунок слева показывает распределение токов в четырех модулях при центральном подключении выходного кабеля к АС-шине. На правой диаграмме представлено распределение для случая, когда нагрузка подключена к правому краю АС-шины.

Рис. 7. Влияние паразитных индуктивностей токовых цепей
Положение точки подсоединения нагрузочного кабеля влияет на величины паразитных индуктивностей и их соотношение. Токовая цепь, расположенная от нее дальше других, обладает наибольшей индуктивностью, соответственно, цепь, ближайшая к месту подключения кабеля, имеет самую низкую индуктивность. В результате влияние асимметричного, индуктивного делителя тока приводит к увеличению нагрузки на модуль с минимальной токовой петлей примерно на 20% относительно среднего значения IC,sum/4.
Индуктивность нагрузки
Величина индуктивности нагрузки Lload влияет на распределение токов, поскольку она определяет скорость их изменения: dIload/dt = VDC/Lload. Чем меньше Lload, тем больше асимметрия, особенно в случае, когда точка подключения выходного кабеля смещена относительно центра АС-шины.
Данный факт необходимо учесть при оценке результатов «двухимпульсного» теста, который обычно проводится при очень низкой индуктивности нагрузки. Испытания в «инверторном» режиме гораздо лучше подходят для анализа распределения токов в реальных условиях эксплуатации. Кроме того, при работе инвертора в режиме постоянной нагрузки полупроводниковые приборы нагреваются. Температура кристаллов IGBT и диодов устанавливается на некотором уровне в зависимости от рабочих режимов и условий охлаждения, что, в свою очередь, влияет на токовый баланс.
На левой осциллограмме (рис. 8) показано распределение токов при «двухимпульсном» тесте с индуктивностью нагрузки, вдвое меньшей, чем при измерениях в инверторном режиме (правая диаграмма).
Как и в предыдущем случае, АС-кабель смещен относительно центра, что приводит к токовой асимметрии, которая увеличивается в правом модуле с 20% до примерно 30% из-за снижения индуктивности.

Рис. 8. Влияние индуктивности нагрузки
Однако испытания в инверторном режиме, проводимые при таком же «смещенном» способе подключении нагрузки, показали, что токовый небаланс составляет всего лишь около 2% по отношению к среднему значению IAC/4. Благодаря положительному температурному коэффициенту напряжения VCEsat и более высокой индуктивности Lload, распределение токов в инверторе намного лучше, чем показывает «двухимпульсный» тест.
Индуктивные связи
Взаимное расположение токонесущих компонентов в системе не менее важно, чем симметрия параллельных цепей. Это иллюстрируется на примере, показанном на рис. 9, в котором нагрузка подключена к выходу крайнего правого модуля IGBT. В отличие от предыдущих случаев, кабель не развернут относительно выходной AC-шины на 90°, а проходит параллельно и в непосредственной близости от нее.

Рис. 9. Эквивалентная схема четырех параллельных токовых путей с учетом индуктивных связей
Предположим, что все индуктивности, изображенные на эквивалентной схеме, имеют одинаковое значение, и нет индуктивной связи между кабелем нагрузки и выходной АС-шиной. В этом случае токовая петля с наименьшим импедансом находится справа, а петля с наибольшим импедансом — слева. Соответственно, токовый баланс должен быть таким, как показано в правой части рис. 7. Фактическое распределение токов, обусловленное индуктивными связями М1, М2 и М3, представлено на рис. 10.

Рис. 10. Влияние паразитных индуктивных связей
Данный эффект иллюстрируется с помощью эквивалентной схемы (рис. 10, слева), на которой два параллельных токовых пути имеют связь через распределенную индуктивность АС-шины (Ls12) и кабеля нагрузки (L’s12). Она представлена в виде источника напряжения М1×diLoad/dt. Изменение тока в L’s12 создает перепад напряжения
на АС-шине за счет индуктивной связи. Это приводит к появлению циркулирующего тока I12, проходящего против часовой стрелки через цепь, состоящую из элементов Ls1, R1, Ls12, R2 и Ls2. Наложение I12 и Iload создает распределение токов, показанное в правой части рис. 10.
Коэффициент индуктивной связи зависит от расстояния между токонесущими проводниками и их взаимного положения. Если дистанция между АС-шиной и нагрузочным кабелем увеличивается, то коэффициент снижается, поскольку ослабевает магнитное поле. Данный эффект может быть полностью подавлен при размещении кабеля перпендикулярно АС-шине, так как магнитные силовые линии в этом случае будут располагаться параллельно ей.
Динамическое распределение токов
Динамическое распределение токов определяется, главным образом, разницей времен переключения параллельных модулей, а следовательно, характеристиками драйверов, элементов цепи затвора и самих полупроводниковых приборов. Конструкция инвертора имеет непосредственное влияние на динамический баланс при нестандартных (например, последовательных) алгоритмах коммутации модулей. В отношении обычных инверторов при синхронном управлении параллельными ключами действует основной принцип: чем симметричнее механический дизайн системы, тем лучше баланс токов.
В левой части рис. 11 показаны типовые эпюры токов параллельных модулей при некоторой разнице времен коммутации. Для того чтобы подчеркнуть этот эффект, транзистор ВОТ (красная кривая) включается с задержкой 100 нс. Это приводит к динамическому небалансу токов в отрицательной полуволне рабочего цикла, при этом в положительной полуволне распределение симметрично. Справа на рисунке показан процесс включения параллельных ВОТ IGBT во время отрицательного полупериода выходного тока. Транзистор, который последним переходит в проводящее состояние, принимает на себя в начале фазы проводимости значительно меньшую нагрузку, чем IGBT, который включается первым и проводит большую часть общего тока.

Рис. 11. Влияние разницы времен коммутации на динамическое распределение токов
Влияние конструкции на динамическую токовую асимметрию описывается с помощью эквивалентной схемы (рис. 12), состоящей из двух параллельных модулей с одинаковыми характеристиками. Элементы L1 и L2 отображают сумму индуктивностей, а R1 и R2 — сумму сопротивлений, расположенных в параллельных АС-ветвях. Для упрощения предполагается, что L1 = L2, R1 = R2, а Lload представляет собой индуктивность АС-выхода, через который проходит общий ток IAC(t).

Рис. 12. Эквивалентная схема для двух параллельных модулей
На рис. 13 показано моделирование распределения токов I1(t) или I2(t) при трех различных значениях индуктивности L1 (или L2). Ее величина для расчета I1(t) или I2(t) равна L, для расчета I’1(t) или I’2(t) — 3,3L и для расчета I~1(t) или I~2(t) — 67L. На графиках виден момент включения IGBT Т1 (Т2), причем Т1 открывается первым. Данные рассуждения справедливы и для процесса выключения IGBT Т1 (Т2) при отрицательном знаке DI.

Рис. 13. Распределение токов при разных величинах индуктивности L1 или L2
В основе анализа лежит предположение, что ток IAC(t) распределяется равномерно между диодами D3 и D4 до момента времени t0:
I1(t) = I2(t) = IAC(t)/2 при t< t0.
Далее IGBT T1 включается, диод D3 блокируется, уровень сигнала в точке К1 вырастает до значения VDC–V1(t). До открывания IGBT T2 в момент t1 диод D4 поддерживает напряжение в точке К2 на уровне VDC–V4(t), сигнал VL12(t) наводится на индуктивностях L1 и L2:
VL12(t) = VL1(t)+VL2(t) = VDC–(V1(t)+V4(t)) при t0 ≤ t< t1.
Наличие VL12(t) приводит к изменению токов I1(t) и I2(t), величины которых могут быть рассчитаны следующим образом:
IL2(t1) = IAC(t0)/2±VL12(t)/(L1+L2)×(t1– t0) при t0 ≤ t< t1.
Выражение показывает, что введение дополнительных индуктивностей, например длинных кабелей для подключения нагрузки к АС-выводам модуля, снижает время нарастания di1/dt и, соответственно, di2/dt. В результате при одинаковом времени задержки и падении напряжения на индуктивностях L1 и L2 это приводит к уменьшению разницы токов I1(t1) и I2(t1).
Эффект симметрирования токов на периоде проводимости
При отсутствии симметрии между параллельными цепями во время цикла коммутации, токи будут полностью или частично сходиться в течение общего периода проводимости IGBT. Эффект распределения токов поясняется ниже на примере двух идентичных модулей, работающих параллельно. На рис. 14 показана соответствующая упрощенная эквивалентная схема, аналогичная приведенной ранее на рис. 12.

Рис. 14. Эквивалентная схема для двух параллельных IGBT
Графики на рис. 15 демонстрируют расчетный профиль изменения токов I1(t) или I2(t) при трех разных значениях индуктивностей L1 или L2. Индуктивность для расчета I1(t) или I2(t) соответствует L, для расчета I’1(t) или I’2(t) — 3,3L и для расчета I~1(t) или I~2(t) — 67L. Величины сопротивлений R1, R2 идентичны для всех трех случаев.

Рис. 15. Эффект симметрирования токов в зависимости от L1 и L2 после включения IGBT

Рис. 16. Токовое смещение в конце периода проводимости IGBT
Предположим, что транзисторы T1 и T2 открываются в одно и то же время t1, но IGBT T1 включается первым. Их токи распределяются по сценарию, описанному в п. «Динамическое распределение токов»:
I1,2(t1) = IAC(t1)/2±DI(t1).
В момент времени t1 влиянием индуктивностей L1 и L2 можно пренебречь, это точка перегиба кривых I1(t) и I2(t). Относительно потенциала шины DC в точке К1 появится напряжение VDC–I1(t) × R1, а в точке К2 — VDC–I2(t) × R2. Результирующий уровень сигнала между ними можно рассчитать следующим образом:
VL1,2(t1) = –I1(t1) × R1+I2(t1) × R2.
Наличие VL1,2(t) увеличивает напряжение на индуктивности L2 и одновременно снижет его на L1. Это приводит к изменению величины токов относительно IАС(t)/2 в соответствии с приведенными далее формулами:
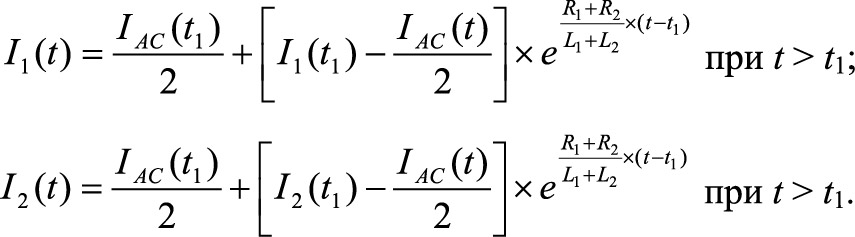
Из приведенного выражения видно, что скорость изменения I1(t) и I2(t) определяется отношением суммы индуктивностей L1 и L2 к сумме сопротивлений R1 и R2:
τ = (L1+L2) / (R1+R2).
Если сумма L1 и L2 возрастает, увеличивается и постоянная времени t, в результате чего снижается скорость изменения токов I1(t) и I2(t). Время, отведенное им на достижение баланса (IAC/2), ограничено наступлением следующего цикла коммутации транзисторов, следовательно, тактовой частотой и мгновенным значением тока IAC(t). Смещение по-прежнему присутствует во время следующего периода переключения: DI1(tn+x) или DI2(tn–x) добавляется к асимметричному распределению тока, описанному в п. «Динамическое распределение токов».
На существующий токовый небаланс накладываются эффекты асимметричного статического распределения, описанные в п. «Статическое распределение токов», которые в свою очередь работают против сходимости токов.
Распределение токов в инверторном режиме
В реальных приложениях необходимо учитывать взаимодействие между распределением токов во время коммутации и в фазе проводимости. Графики, приведенные на рис. 17, относятся к параллельному соединению двух модулей с одинаковыми характеристиками, работающих в симметрично спроектированной системе. Таким образом, факторами, определяющими влияние механической конструкции на статическое распределение токов (п. «Статическое распределение токов»), можно пренебречь. Здесь рассматривается только динамическое распределение токов (п. «Динамическое распределение токов») и эффект их выравнивания (п. «Эффект симметрирования токов на периоде проводимости») с учетом значений индуктивностей Ls между выходами модулей. Величины Ls для случая (1) соответствуют «жесткому» параллельному соединению АС-выходов с помощью короткой медной шины, в случае (2) выходы модулей объединяются силовыми кабелями, случай (3) относится к соединению выходов через выравнивающие дроссели. Причиной токовой асимметрии является разница времен коммутации модулей, составляющая примерно 150 нс (синий график).

Рис. 17. Влияние индуктивности АС-соединения на баланс токов
Индуктивности L1 и L2 ограничивают скорость изменения токов IAC1(t) и IAC2(t) во время переключения модулей со смещенным моментом коммутации. Чем меньше сумма L1+L2, тем больше результирующая разница динамических потерь модулей (вариант 1). Распределение потерь проводимости зависит от скорости «сходимости» токов. Чем больше сумма индуктивностей L1 и L2, тем больше будут отличаться токи IAC1(t) и IAC2(t) от половины номинального значения (IAC/2) в конце периода проводимости. Соответствующая разница накапливается по сумме циклов переключения, что приводит к неравномерному распределению потерь (вариант 2).
Если же значения L1 и L2 велики настолько, что расхождение токов I1(t) и I2(t) сводится к минимуму при переключении модулей с несовпадающим моментом коммутации, то при этом достигается почти равномерное распределение токов (вариант 3). В этом случае отдельные модули могут рассматриваться как источники напряжения. На рис. 18 показана упрощенная эквивалентная схема соединения двух параллельных ключей при большой индуктивности АС-цепи.

Рис. 18. Упрощенная эквивалентная схема соединения двух параллельных модулей с большой АС-индуктивностью
Разница между выходными напряжениями VV1 и VV2 зависит от разности моментов переключения Dt, рабочей частоты fsw и напряжения DC-шины VDC. Она может быть определена с помощью следующей формулы:
VV1–VV2 = Dt × fsw × VDC.
Возникающий таким образом перепад напряжений VV1–VV2 вызывает появление компенсирующего тока DI через индуктивности L1 и L2, который накладывается на выходные токи I1(t) и I2(t):
ΔI = (VV1–VV2) / (2p × fout(L1+L2)).
Наличие омических сопротивлений токовых цепей в данном случае не учитывается.
Влияние схемы управления затворами
Любые импедансы, присутствующие в параллельных цепях, влияют на распределение токов, аналогичное воздействие оказывают и характеристики драйверов. В отличие от механической конструкции, главным образом определяющей статический баланс токов, характеристики драйверов преимущественно влияют на их динамическое распределение. Причиной этого является, с одной стороны, различие времен распространения сигнала и напряжений «затвор–эмиттер» VGE, а также наличие джиттера. С другой стороны, при использовании концепции «центрального» драйвера на распределение токов влияют характеристики общей цепи эмиттера.
Для проведения измерений использована экспериментальная установка с максимально симметричной конструкцией, позволяющей минимизировать ее влияние. Также предполагается, что полупроводниковые элементы и модули, соединенные параллельно, имеют одинаковые характеристики.
«Индивидуальные» драйверы и динамическое распределение токов
Разброс временных характеристик
Время распространения сигнала в системе определяется по задержке изменения состояния выходного сигнала относительно изменения напряжения на входе. Чем больше электронных блоков или элементов находится на пути прохождения сигнала, тем выше разброс суммарного времени распространения. Вероятность того, что выходные сигналы в параллельных каналах будут менять свое состояние одновременно, снижаться с увеличением количества устройств в канале:

В отношении различных концепций схемы управления затворами («центральный» или «индивидуальные» драйверы) это означает, что временной разброс в первом случае теоретически должен быть ниже, чем во втором, когда параллельно соединенные модули контролируются отдельными устройствами. Графики в левой части рис. 19 представляют динамическое распределение токов параллельных модулей SEMIX603GB12Ep, измеренных в ходе импульсного теста. Каждый из модулей имеет собственный цифровой драйвер SKYPER 12, соединяемый с модулем методом прессовой посадки. Одна из плат управления специально модернизирована таким образом, чтобы IGBT (красный график) выключался с задержкой около 100 нс.

Рис. 19. Оценка влияния разброса временных характеристик драйверов
Из-за длительного периода проводимости ток параллельных IGBT не сразу коммутируется в соответствующие оппозитные диоды, частично он протекает через все еще открытый транзистор. В данном тесте увеличение IAC составляет примерно 48% относительно номинального значения IC,sum/4. Распределение токов при коммутации IGBT происходит в соответствии с концепцией, описанной в п. «Динамическое распределение токов».
В действительности временной сдвиг между параллельными цифровыми драйверами SKYPER12, обусловленный разбросом времени распространения сигнала, значительно меньше 100 нс. Влияние реальных задержек на процесс коммутации в инверторном режиме показано в правой части рис. 19.
Джиттер
Возникновение джиттера у параллельно соединенных драйверов обусловлено тем, что каждый из них имеет свой тактовый генератор, соответственно, временной сдвиг, как и джиттер, определяется тактовой частотой fclock и диапазоном ее изменения. Максимальное смещение фронтов выходных импульсов соответствует одному периоду fclock:
Tjitter,max = 1/fclock.
Дисперсия временных смещений, возникающих вследствие джиттера, приблизительно соответствует нормальному распределению Гаусса 0 ≤ tjitter ≤ tclock. Поэтому невозможно предсказать, какой именно драйвер сформирует выходной сигнал в конкретный момент времени. Теоретически можно предположить, что с увеличением числа изменений сигнала на входе параллельных драйверов среднее значение вариации временных сдвигов между выходными сигналами приближается к нулю:

В реальных применениях джиттер добавляется к временному смещению, обусловленному различием времен распространения сигнала. Эффект джиттера, однако, отсутствует при использовании концепции «центрального» драйвера:
td = Dtp+tjitter.
На рис. 20 показаны результаты импульсного теста, проведенного с четырьмя параллельными «индивидуальными» драйверами. Время задержки из-за джиттера составляет около 25 нс, что соответствует тактовой частоте опорного генератора SKYPER12 fclock = 40 МГц. Результаты измерений на обеих диаграммах получены в одинаковых условиях работы и при идентичной последовательности импульсов. Эпюры в левой части рисунка демонстрируют симметричное распределение токов, временная задержка между выходами драйверов почти нулевая. Диаграммы в правой части показывают динамическое распределение токов при временном сдвиге между выходами параллельных драйверов приблизительно 25 нс. При этом увеличение тока составляет около 12% (желтый график) относительно номинального значения IC,sum/4. Распределение токов соответствует концепции, описанной в п. «Динамическое распределение токов».

Рис. 20. Измерение влияния джиттера
Влияние напряжения «затвор–эмиттер» VGE
Можно предположить, что скорость переключения IGBT зависит от времени заряда и разряда его входной емкости. При условии, что параллельно соединенные полупроводниковые ключи имеют идентичные характеристики и цепи затвора одинаковы, скорость заряда определяется выходным напряжением драйвера VGE. Если каждый модуль управляется от индивидуальной схемы контроля, формирующей свое собственное напряжение, то амплитуды сигналов на затворах также будут отличаться. Этого не происходит при использовании центрального драйвера.
Для иллюстрации этого эффекта выходные напряжения одного драйвера VGon и VGoff (красный график) увеличены примерно на 0,7 В, в результате чего соответствующий IGBT включается быстрее и блокируется медленнее. Эпюры в левой части рис. 21 показывают динамическое распределение токов в процессе выключения. Из-за длительного периода проводимости IGBT ток не сразу коммутируется в соответствующие оппозитные диоды, небольшая часть его проходит через все еще открытый транзистор. В ходе этого цикла коммутации рост тока достигает примерно 52% относительно номинального значения IC,sum/4. Распределение токов при переключении IGBT соответствует концепции, описанной в п. «Динамическое распределение токов». В правой части рисунка показаны результаты измерений в инверторном режиме. Разница времен переключения четко отображается в виде пиков на красной кривой. Это влияет на распределение токов, максимальное отклонение составляет приблизительно 7% от номинального значения IAC/4.

Рис. 21. Влияние напряжения «затвор–эмиттер»
Динамическое распределение токов при управлении от «центрального» драйвера
Резистор затвора
При «прямом» параллельном подключении затворов параллельных IGBT к выходу центрального драйвера транзистор Т1 с минимальным пороговым уровнем VGE(th) включится первым и ограничит напряжение на затворе параллельного Т2 на уровне «плато Миллера» VGE(pl)1 (рис. 22). В результате IGBT Т1 будет проводить большую часть тока нагрузки в течение времени Dt, до тех пор, пока емкость «коллектор–затвор» Cgc не зарядится полностью. Когда на антипараллельном диоде появляется полное блокирующее напряжение, сигнал на затворе снова нарастает, и оба транзистора включаются. Чтобы избежать подобной ситуации, каждый IGBT должен иметь индивидуальный резистор затвора. В этом случае напряжения на затворах будут увеличиваться независимо друг от друга, и разница моментов включения Dt станет почти нулевой.

Рис. 22. Эквивалентная схема двух параллельных IGBT с общим резистором затвора
Эмиттерный резистор
В левой части рис. 23 показана схема с прямым подключением драйвера к эмиттерам параллельных IGBT и паразитными индуктивностями в эмиттерной цепи. У транзистора верхнего плеча (ТОР IGBT) паразитная индуктивность создается АС-подключением модуля, у транзистора нижнего плеча (ВОТ IGBT) она формируется цепью подключения минусовой DC-шины. Разница скоростей коммутации IGBT, а также несимметрия паразитных индуктивностей создают различные перепады напряжения VL1 и VL2. Это приводит к появлению циркулирующего тока I12, протекающего через эмиттерные соединения драйвера. Его величина может достигать высоких значений, способных перегрузить тонкие сигнальные выводы эмиттера. Чтобы избежать этого, в эмиттерных соединениях драйвера устанавливаются токоограничивающие резисторы. При симметричной конструкции силовых цепей хорошие результаты получаются при величине сопротивлений RE1, RE2 порядка 0,5 Ом. Отметим, что эти резисторы последовательно соединены с сопротивлениями затвора RG и, следовательно, они оказывают влияние на характеристики переключения IGBT.

Рис. 23. Эквивалентная схема двух параллельных IGBT с непосредственным соединением эмиттеров с выходом драйвера (слева) и соединением эмиттеров через сопротивления RE.
Обратная связь в цепи эмиттера
При управлении IGBT от «центрального» драйвера наличие его связи с эмиттерами создает балансирующий эффект. Это является одним из преимуществ данной концепции по сравнению с вариантом «индивидуальных» драйверов, где токи параллельных цепей могут изменяться независимо.
Эффект балансировки поясняется на примере эквивалентной схемы с двумя параллельными транзисторами, показанной на рис. 24. Если IGBT Т1 включается раньше, чем Т2, на индуктивности эмиттера L1 образуется падение напряжения, что приводит к появлению тока (L12, синяя кривая) через эмиттерные резисторы RE1 и RE2. Он создает на них падение напряжения, которое снижает уровень сигнала управления Т1 и добавляется к напряжению на затворе Т2:
VGE1 = VGE–VRG1–VRE1,
VGE2 = VGE–VRG2+VRE2.

Рис. 24. Эквивалентная схема двух параллельных IGBT с общим эмиттером
В результате снижается напряжение на затворе того транзистора, который включается первым (Т1), что задерживает его коммутацию, т. е. данный эффект действует, как отрицательная обратная связь. У IGBT, который открывается позже (Т2), уровень сигнала на затворе повышается, и он переключается быстрее (положительная обратная связь). Однако описанный балансирующий эффект, возникающий благодаря общей эмиттерной цепи, имеет свои ограничения:
- При больших индуктивностях эмиттера взаимная связь становится слишком сильной. Даже незначительные различия в скорости переключения параллельных IGBT создают большую разницу напряжений на затворах, что может привести к паразитной осцилляции.
- При несимметричной конструкции и несбалансированных индуктивностях в эмиттерных цепях (например, L1>>L2) обратная связь по напряжению на затворах будет сильно отличаться, что создает разницу моментов коммутации.
Таким образом, обязательным требованием при проектировании конструкции параллельного соединения IGBT является обеспечение малых и симметричных индуктивностей эмиттера. В большей степени данное требование относится к ключам верхнего уровня TOP IGBT, чем к BOT IGBT, поскольку АС-соединение, как правило, имеет большую индуктивность, чем подключение к DC-шине.
Данный факт накладывает ограничения и на сам «центральный» драйвер. Для систем высокой мощности требуется параллельное соединение большого количества модулей. При этом подключения эмиттеров неизбежно удлиняются и усложняются, следовательно, возрастают индуктивности и ухудшается балансировка. Следствием является неравномерность распределения токов и возникновение паразитных осцилляций. Поэтому в больших системах следует использовать «группировку» модулей или концепцию «индивидуальных» драйверов.
Дополнительные компоненты цепи затвора
В дополнение к затворным (RGx) и эмиттерным резисторам (RЕx), рекомендуется подключить сопротивление утечки (10–100 кОм) между затвором и эмиттером (RGEx). Это позволяет предотвратить случайное включение IGBT, например, при обрыве в цепи управления.
Чтобы защитить затвор от перенапряжений, в эту же цепь следует включить импульсный стабилитрон (Vх) или диод-супрессор. Необходимо убедиться в том, что пороговое напряжение супрессора превышает возможный уровень сигнала на затворе, но ниже его максимально допустимого значения (±20 В для IGBT).
В некоторых случаях положительное влияние на работу параллельных IGBT оказывает конденсатор (Cx) в цепи «затвор–эмиттер». Его величина находится в диапазоне 10–50% от собственной входной емкости Cies IGBT. Эффект от использования Cx можно проверить с помощью стандартного «двухимпульсного» теста.
Как правило, защита от короткого замыкания IGBT реализуется на основе измерения напряжения насыщения VCEsat (DESAT). При этом в цепь коллектора включается резистор (RСx) и быстрый высоковольтный диод. Все элементы схемы управления затвором, включая цепь защиты, должны располагаться в непосредственной близости от модуля. Для этой цели рекомендуется разработать интерфейсную плату, содержащую описанные компоненты и устанавливаемую вблизи сигнальных контактов IGBT (рис. 25). Выводы затворов и эмиттеров параллельных транзисторов должны подключаться симметричными печатными дорожками минимальной длины или короткими витыми кабелями.
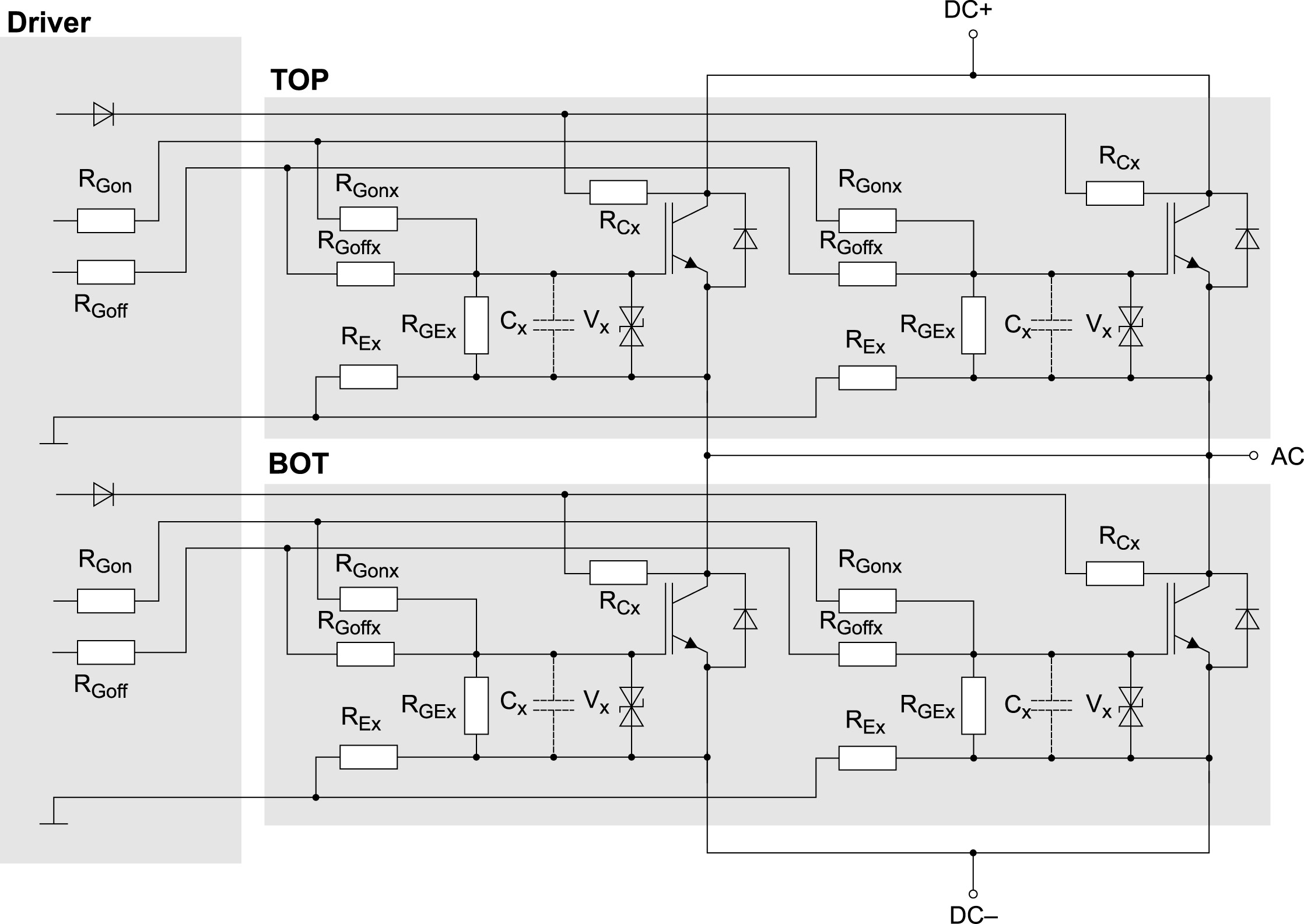
Рис. 25. Рекомендуемая схема управления двумя параллельными IGBT
Заключение
Для минимизации влияния свойств полупроводниковых приборов на распределение токов при параллельном соединении следует использовать модули из одной партии. Как правило, асимметрия, обусловленная характеристиками IGBT, в этом случае не превышает 5%. Небаланс токов должен быть учтен при расчете потерь проводимости и переключения. Чтобы добиться симметричного распределения тока, необходимо обеспечить идентичность импедансов параллельных токовых путей. Для этого АС-соединения параллельных модулей должны иметь одинаковую длину и выполняться максимально симметрично относительно центра сборки. Кабель подключения нагрузки следует прокладывать на некотором удалении от модулей, чтобы исключить паразитные индуктивные связи.
Испытания в инверторном режиме показывают гораздо лучшее распределение токов, чем «двухимпульсный» тест, благодаря положительному температурному коэффициенту IGBT и высокой индуктивности нагрузки. Данный тест хорошо подходит для исследования динамических характеристик и симметричности коммутационных состояний, но не для оценки распределения токов параллельно соединенных модулей.
При выборе концепции управления затворами решающее значение имеет общая мощность системы. Для компактных маломощных систем использование «центрального» драйвера является предпочтительным. Негативное влияние на распределение токов из-за джиттера, различия времен прохождения сигналов, а также разницы напряжений «затвор–эмиттер» при этом оказывается несущественным. Кроме того, в данном случае проявляется положительный эффект обратной связи по эмиттерным цепям.
Однако в более мощных системах соединения эмиттеров становятся более длинными и несимметричными, в результате чего обратная связь по эмиттеру приводит к возникновению паразитных колебаний между параллельными полупроводниками, элементами или модулями. Для исключения этого следует объединять параллельные ключи в группы или использовать концепцию «индивидуальных» драйверов. При этом необходимо позаботиться о том, чтобы разброс временных характеристик драйверов и влияние джиттера были как можно ниже.
Разница времен переключения IGBT и их скоростей коммутации является решающей при определении уравнивающих индуктивностей в АС-цепях. При низком джиттере и малых различиях времен распространения сигналов дополнительные АС-индукторы вообще не требуются, и выходы модулей могут быть жестко соединены в параллель. Если токовая асимметрия превышает требуемое значение, параллельные токовые ветви должны быть разделены через выравнивающие индуктивности. В частности, их функции могут выполнять разделенные обмотки электродвигателя или индукторы выходных фильтров, часто используемых в системах высокой мощности.
- SEMIKRON.com
- Wintrich, U. Nicolai, W. Tursky, T. Reimann. Application Manual Power Semiconductors. 2nd edition. ISLE Verlag, 2015.
- Spang. Current sharing between parallel IGBTs in power modules during short circuit with unsymmetrically connected load. 2016.
- А. Колпаков. Никакой пайки! О надежности сигнальных соединений силовых модулей // Силовая электроника. 2015. № 3.
 19 июня, 2020
19 июня, 2020 23 июня, 2021
23 июня, 2021 12 января, 2009
12 января, 2009