

ШКОЛА MATLAB. Урок 29. Оптимизация энергетических характеристик активного полупроводникового преобразователя в мехатронной системе
Введение
Мехатронные системы стационарных и автономных объектов повсеместно выполняют функцию управляемых преобразователей мощности: электрической в механическую в системах электропривода, механической в электрическую в генераторных установках, а также двойного преобразования в разнообразных испытательных стендах и системах электроснабжения автономных объектов[13,15,16,17,18,19].
Эти мехатронные системы содержат электрические машины, устройства силовой электроники и микропроцессорные системы управления распределением энергии, управления этой энергией и диагностики работы всей системы.
Важное энергетическое свойство всех таких систем состоит в том, что обмен кинетической и потенциальной энергией в них происходит на высокой (несущей, коммутационной) частоте, а передача мощности — на низкой (основной, полезной) частоте. Именно это свойство позволяет управлять качеством электрической энергии (активные фильтры, корректоры коэффициента мощности) и изменять направление передачи мощности (активные полупроводниковые преобразователи — АПП).
Примерами таких систем, в частности, служат судовые энергетические системы. В случае построения классической энергетической системы судна на переменном токе мехатронная система, кроме своих основных функций, должна обеспечить доставку электрической энергии к судну от береговой электрической сети в условиях порта. При построении энергетической системы судна на постоянном токе мехатронная система обеспечивает поддержание параметров электрической энергии в звене постоянного тока. Аналогичные условия работы мехатронной системы имеют место в автономном электротранспорте.
Универсальное решение для обеспечения всех условий работы и улучшения энергетических характеристик мощных судовых и транспортных систем реализуется с помощью активного полупроводникового преобразователя (АПП). В статье рассматриваются и исследуются способы управления, позволяющие оптимизировать его энергетические характеристики.
Активный полупроводниковый преобразователь
Конструктивно активный полупроводниковый преобразователь представляет собой два трехфазных инвертора, соединенных общим звеном постоянного тока с емкостным фильтром. Обобщенная функциональная схема мехатронной системы сети переменного тока с активным полупроводниковым преобразователем показана на рис. 1*.

Рис. 1. Функциональная схема активного полупроводникового преобразователя
*В электрических сетях постоянного тока отсутствует АИ2, а параллельно накопителю потенциальной электрической энергии подключена нагрузка [3].
В этой функциональной схеме обозначены:
- АПП — активный полупроводниковый преобразователь;
- АИ1, АИ2 — автономные инверторы;
- СУАИ1, СУАИ2 — системы управления автономными инверторами;
 — результирующие векторы эдс на стороне переменного тока инвертора АИ1, напряжения и тока сети;
— результирующие векторы эдс на стороне переменного тока инвертора АИ1, напряжения и тока сети; — результирующие векторы эдс якоря электрической машины, напряжения и тока на стороне переменного тока инвертора АИ2;
— результирующие векторы эдс якоря электрической машины, напряжения и тока на стороне переменного тока инвертора АИ2;- Udc — напряжение в цепи постоянного тока инверторов;
- r1, X1 = ω1L1 — активное и реактивное сопротивление дросселя в сети переменного тока инвертора АИ1;
- r2, X2 = ω2L2 — активное и реактивное сопротивления электрической машины переменного тока.
Работа СУАИ1 синхронизируется с сетью, угловая частота которой ω1 = 2πf1. Обычно для этого используется система фазовой автоподстройки частоты (ФАПЧ). Работа СУАИ2 синхронизируется от электрической машины. В системах с синхронными двигателями для таких целей предусмотрен датчик положения ротора (ДПР), в этом случае угловая частота связана с механической скоростью вращения вала (ω2 = pωm). В системах с асинхронными двигателями угловая частота w2 вычисляется в зависимости от выбранного закона управления (Инвертор АИ2 может быть подключен и к пассивной нагрузке, тогда ЭДС Е2 заменяется падением напряжения на этой нагрузке.).
Если АПП передает активную мощность из сети переменного тока в электрическую машину или пассивную нагрузку, то в такой системе АИ1 выполняет роль активного выпрямителя, а АИ2 — автономного инвертора. Если АПП передает активную мощность от электрической машины в сеть переменного тока, то электромеханическая система выполняет функцию генераторной установки. В такой системе АИ1 является сетевым инвертором, а АИ2 — активным выпрямителем. Эта способность двухсторонней передачи энергии является основным достоинством рассматриваемой системы. Ее дополнительное преимущество состоит в способности обеспечить синусоидальную форму тока как в электрической сети, так и в якоре электрической машины или пассивной нагрузке.
В общей цепи постоянного тока происходит передача только активной мощности Pdc. В контурах переменного тока наблюдается передача активной мощности P1, P2 циркуляция реактивных мощностей Q1, Q2. Активные мощности жестко связаны между собой (равны при пренебрежении потерями в АПП), а реактивные мощности зависят от способа управления инверторами АИ1, АИ2. Эти мощности никак не связаны между собой и могут управляться независимо друг от друга.
В [4, 5] рассмотрены и проанализированы способы управления инвертором в электроприводе и генераторной установке с синхронной машиной, обеспечивающие поддержание в контуре «АИ2 — машина» нулевой реактивной мощности (Q2 = 0), в которых синхронизация СУАИ2 осуществляется от ДПР.
В данной статье оптимальные способы управления, предложенные в [4, 5], распространены на управление инвертором АИ1, подключенным к жесткой электрической сети переменного тока («Жесткой» считается сеть, в которой можно пренебречь падением напряжения на внутреннем импедансе и считать напряжение Q1 не зависящим от протекающего тока).
Аналитическое и модельное исследование осуществляются, как и ранее, на базе анализа электромагнитных процессов в квазиустановившихся режимах, изложенных в классических трудах российских и зарубежных ученых в области электротехники, электромеханики и теории автоматического управления [1, 7, 10, 11, 14].
Анализ системы «сеть — АИ1» при независимом управлении
Математическое описание электромагнитных процессов в системе «сеть — АИ1» осуществляется методом результирующего (пространственного) вектора [8] и методом основной (гладкой, полезной) составляющей [2].
Автономный инвертор АИ1 (рис. 1) по отношению к «жесткой» сети может быть представлен источником ЭДС, первая гармоника (полезная составляющая) которой равна [11]:

где m — коэффициент модуляции, φm — угол, равный сдвигу по фазе между результирующим вектором напряжения сети U1 и результирующим вектором эдс инвертора E1. Этот угол зависит от нагрузки, аналогично тому, как зависит от нагрузки угол между эдс синхронного генератора и напряжением сети, к которой этот генератор подключен. Если коэффициент модуляции и угол φm считать заданными (управляющими) сигналами и устанавливать их в определенном диапазоне, можно исследовать электромагнитные и энергетические характеристики системы. Такой способ управления инвертором назовем независимым.
Исследование системы «сеть — АИ1» при независимом способе управления позволяет оценить пределы изменения энергетических показателей системы и ее качественные свойства.
Все дальнейшие исследования выполнены для системы со следующими параметрами:
U1 = 310 В, Udc = 1000 В, r1 = 0,1 Ом,
X1 = 1,57 Ом.
Уравнение электромагнитных процессов в квазиустановившемся режиме работы, составленное по второму закону Кирхгоффа для полезной составляющей системы «сеть — АИ1» (рис. 1), запишем в виде:
![]()
Энергетические свойства рассматриваемой системы удобно пояснить, используя векторные диаграммы. Векторные диаграммы в синхронно вращающейся системе координат (x, y), синхронизированной с сетью, для случая, когда АИ1 работает в режиме активного выпрямителя и в режиме сетевого инвертора, показаны на рис. 2а, б.

Рис. 2. Векторные диаграммы АИ1:
а) в режиме активного выпрямителя;
б) сетевого инвертора
Кроме вращающихся осей координат x,y, связанных с напряжением сети U1, так что U1 = Uy, Ux = 0, на рис. 2 обозначены вращающиеся оси d, q, связанные с ЭДС E1инвертора, так что E1= Eq, Ed = 0. В установившемся режиме эти две системы координат неподвижны по отношению друг к другу, а управление инвертором от ФАПЧ осуществляется в системе координат x, y.
По отношению к сети переменного напряжения АИ1 потребляет активную мощность при φm<0 °(активный выпрямитель) или отдает (рекуперирует) активную мощность в сеть при φm> 0 °(сетевой инвертор).
В этом случае уравнение (2) в осях x, y можно представить в виде:

Из этих уравнений (3) определяются токи и мощности в сети и в АИ1:

где
![]() полное сопротивление дросселя.
полное сопротивление дросселя.
Энергетические характеристики системы «сеть — АИ1», рассчитанные по уравнению (5) в пространственных координатах при независимом управлении АИ1, показаны на рис. 3, 4.

Рис. 3. Активная и реактивная мощности в сети при независимом управлении АИ1

Рис. 4. Активная и реактивная мощности АИ1 при независимом управлении
Проекции соответствующей мощности на основную плоскость представляют зависимости между заданными величинами, при которых мощность постоянна. Кроме того, по этим проекциям определяется допустимый диапазон изменения данных величин, обеспечивающих заданную мощность. Качественно оценивая энергетические свойства системы при независимом управлении, можно сделать следующие выводы:
- Активная мощность в сети и в инверторе практически равны по величине, они положительны при отрицательной фазе модуляции и отрицательны при положительной фазе модуляции, что соответствует векторной диаграмме (рис. 2).
- Реактивная мощность в сети может быть как положительной, так и отрицательной, зависимость между управляющими величинами при постоянной реактивной мощности в сети приближается к параболической.
- Реактивная мощность в инверторе преимущественно отрицательна.
- В сети и в инверторе при определенных соотношениях между управляющими сигналами можно поддерживать нулевое значение реактивной мощности.
Анализ системы «сеть — АИ1» при токовом управлении
В автономном инверторе, подключенном к сети через дроссель с параметрами r1, X1 = ω1L1, обычно используется токовое управление, при котором ток в АИ1 формируется за счет релейной отрицательной обратной связи [1]. В этом случае задающими (управляющими) сигналами в системе «сеть — АИ1» выступают токи сети (Ix, Iy) в осях x, y. Электромагнитные и энергетические характеристики в системе «сеть — АИ1» в этом случае рассчитываются по уравнениям, составленным на основании геометрических соотношений векторной диаграммы (рис. 2):

Энергетические характеристики системы «сеть — АИ1» при токовом управлении, рассчитанные по уравнениям (6, 7) в пространственных координатах, показаны на рис. 5, 6.

Рис. 5. Активная и реактивная мощности в сети при токовом управлении

Рис. 6. Активная и реактивная мощности в АИ1 при токовом управлении
Оценивая энергетические свойства системы при токовом управлении, можно сделать следующие выводы:
- Активная мощность в сети и в инверторе зависит только от тока Iy, она положительна при положительном Iy и отрицательна при отрицательном Iy, что соответствует векторной диаграмме (рис. 2).
- Реактивная мощность в сети не зависит от Iy, она определяется только значением Ix и может быть положительной и отрицательной.
- Реактивная мощность в инверторе зависит как от Ix, так и от Iy и может быть положительной и отрицательной.
- Для поддержания в инверторе постоянной реактивной мощности (в том числе и нулевой) зависимость между Ix и Iy необходимо поддерживать близкой к параболической.
Анализ системы «сеть — АИ1» при оптимизированном токовом управлении
Анализ энергетических характеристик системы «сеть — АИ1» при токовом управлении свидетельствует о том, что при определенной зависимости между управляющими воздействиями независимо от величины и направления активной мощности, передаваемой системой «сеть — АИ1», реактивная мощность в сети либо в инверторе может поддерживаться равной нулю. Такой режим работы назван оптимизированным. Следует отметить, что оптимизированный режим работы сети не совпадает с оптимизированным режимом работы инвертора. Это различие объясняется наличием дросселя с параметрами r1, X1 = ω1L1, включенного последовательно с сетью и инвертором. Далее электромагнитные и энергетические характеристики для оптимизированного режима работы сети и инвертора рассматриваются отдельно.
Система с оптимизацией потребления мощности из сети
На рис. 7 приведены векторные диаграммы системы «сеть — АИ1» при оптимизированном режиме работы сети, когда сдвиг по фазе между током и напряжением в сети равен нулю или 180°.

Рис. 7. Векторные диаграммы системы «сеть — АИ1» при оптимизации потребления мощности из сети
Условие оптимальности в этом случае удовлетворяется при Ī1=I1=Iу, Iх=0. Управление инвертором, как и ранее, осуществляется от ФАПЧ в осях x, y, связанных с сетью, а электромагнитные и энергетические характеристики рассчитываются по уравнениям, составленным на основании геометрических соотношений векторной диаграммы (рис. 7):

Энергетические характеристики системы «сеть — АИ1» при оптимизации потребления мощности из сети, рассчитанные по уравнениям (8, 9), приведены на рис. 8.

Рис. 8. Энергетические характеристики системы «сеть — АИ1» при оптимизации потребления мощности из сети.
При оптимизации потребления мощности из сети реактивная мощность в инверторе отрицательна как в режиме активного выпрямителя, так и в режиме сетевого инвертора.
Это означает, что сеть для инвертора представляет собой активно-емкостную нагрузку, а реактивный емкостный ток вызывает дополнительные потери в инверторе и в сопротивлении дросселя.
Система с оптимизацией режима работы инвертора
На рис. 9 приведены векторные диаграммы системы «сеть — АИ1» при оптимизированном режиме работы инвертора, когда сдвиг по фазе между током и основной гармоникой ЭДС инвертора равен нулю или 180°.
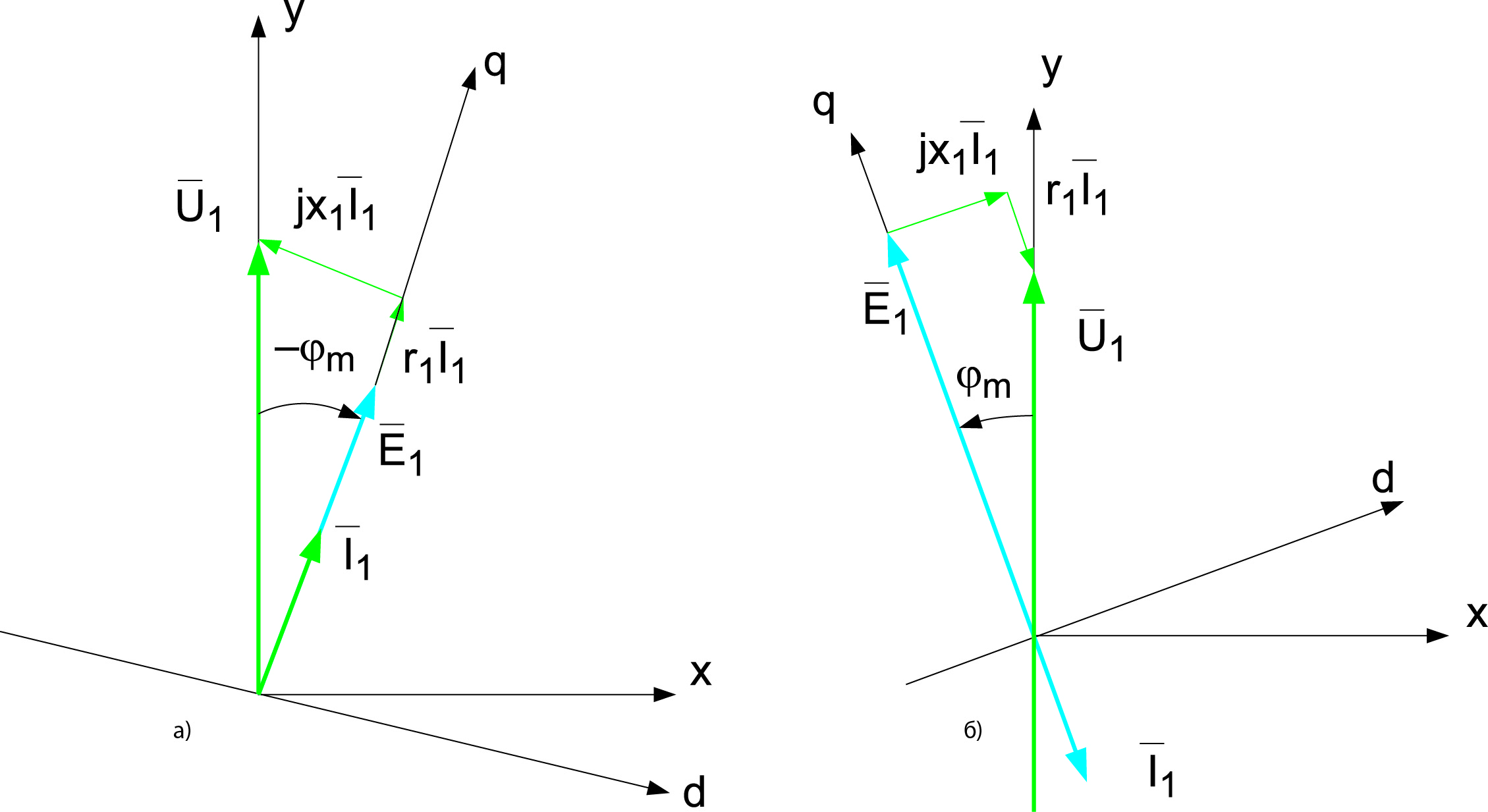
Рис. 9. Векторные диаграммы системы «сеть — АИ1» при оптимизации мощности в инверторе
Условие оптимальности в этом случае удовлетворяется при Ī1=Iq, Id=0, а электромагнитные и энергетические характеристики рассчитываются по уравнениям, составленным на основании геометрических соотношений векторной диаграммы (рис. 9):

Энергетические характеристики системы «сеть — АИ1» при оптимизации потребления мощности инвертором, рассчитанные по уравнениям (10, 11), приведены на рис. 10.

Рис. 10. Энергетические процессы системы «сеть — АИ1» при оптимизации мощности в инверторе
При оптимизации мощности в инверторе реактивная мощность в сети положительна как в режиме активного выпрямителя, так и в режиме сетевого инвертора.
Это означает, что для сети инвертор представляет активно-индуктивную нагрузку, а реактивный, индуктивный ток вызывает дополнительные потери только в сопротивлении дросселя.
Таким образом, оценка энергетических свойств рассмотренной системы «сеть — АИ1» по первой гармонике (гладкой, полезной составляющей) свидетельствует о том, что более выгодным с точки зрения дополнительных потерь является второй из двух оптимизированных режимов работы — режим, при котором ток и ЭДС инвертора совпадают по фазе, поскольку в этом режиме в инверторе не создается дополнительных потерь от реактивного тока. Однако для окончательного вывода о целесообразности использования рассмотренных оптимизированных режимов следует оценить не только энергетику процессов по полезной составляющей, но и энергетику процессов коммутационных. Тем более известно, что динамические коммутационные процессы в инверторах могут стать определяющими при оценке потерь [6, 7, 9, 12]. Для этого рассмотрим особенности токового управления инвертором.
При токовом управлении частота коммутации в АИ1 зависит от постоянной дросселя (τ1 = L1/r1), от ширины петли гистерезиса релейного регулятора тока и от значения мгновенного тока. Значение частоты коммутации для систем средней и большой мощности находится в пределах 2–10 кГц.
Токовое управление инвертором имеет свои пределы, которые определяются соотношением напряжения (U1) и ЭДС инвертора (E1). В течение промежутка времени, когда мгновенное значение e1 превышает мгновенное значение u1, релейный регулятор тока переходит в насыщенное состояние и слежение за мгновенным током в фазе отсутствует. В этом промежутке времени отсутствует и коммутация в соответствующей фазе инвертора. Превышение ЭДС инвертора над напряжением сети происходит, когда нагрузка для инвертора является активно-емкостной, то есть инвертор нагружен отрицательной реактивной мощностью, что имеет место при оптимизации мощности в сети (рис. 7, 8). Относительный промежуток времени, в течение которого отсутствует коммутация, можно приблизительно оценить по формуле:

Наличие такого промежутка приводит к уменьшению коммутационных потерь, что позволяет рассчитать относительный коэффициент их уменьшения:

Зависимость коэффициента уменьшения коммутационных потерь от тока, рассчитанного по уравнению (13) для оптимизированной системы «сеть — АИ1», представлена на рис. 11. Здесь по оси абсцисс отложен ток в относительных единицах (pu-perunits), определенный как отношение реального тока I1 к току короткого замыкания Ikz = U1/z1, по выражению:
Iри = z1I1/U1. (14)
Из зависимостей (рис. 11) следует, что в режиме сетевого инвертора имеет место более длительный интервал отсутствия коммутации и, соответственно, более интенсивное уменьшение коммутационных потерь. В режиме активного выпрямителя при малых токах (Ipu< 0,12) промежуток времени, в течение которого нет коммутации, вообще отсутствует (равен нулю).

Рис. 11. Зависимость коэффициента уменьшения коммутационных потерь от относительного тока
Таким образом, при оптимизации работы системы «сеть — АИ1» окончательное решение в пользу одного из способов управления инвертором может быть осуществлено при сравнении потерь в системе «сеть — АИ1» как по полезной, так и по коммутационной составляющим. Методики расчета этих потерь изложены в литературе [5, 6, 8, 9, 12].
Модельное исследование системы «сеть — АИ1»
Модель исследуемой системы представлена на рис. 12. Управление активной мощностью в реальных мехатронных системах реализуется за счет построения системы стабилизации напряжения в звене постоянного тока АПП. В этой системе стабилизации токовый контур АИ1, отвечающий за активную составляющую тока в сети, строится как подчиненный контуру стабилизации напряжения на конденсаторе в звене постоянного тока [13]. В модели (рис. 12) это реализовано применением в звене постоянного тока источника постоянного напряжения (DC Voltage Source).
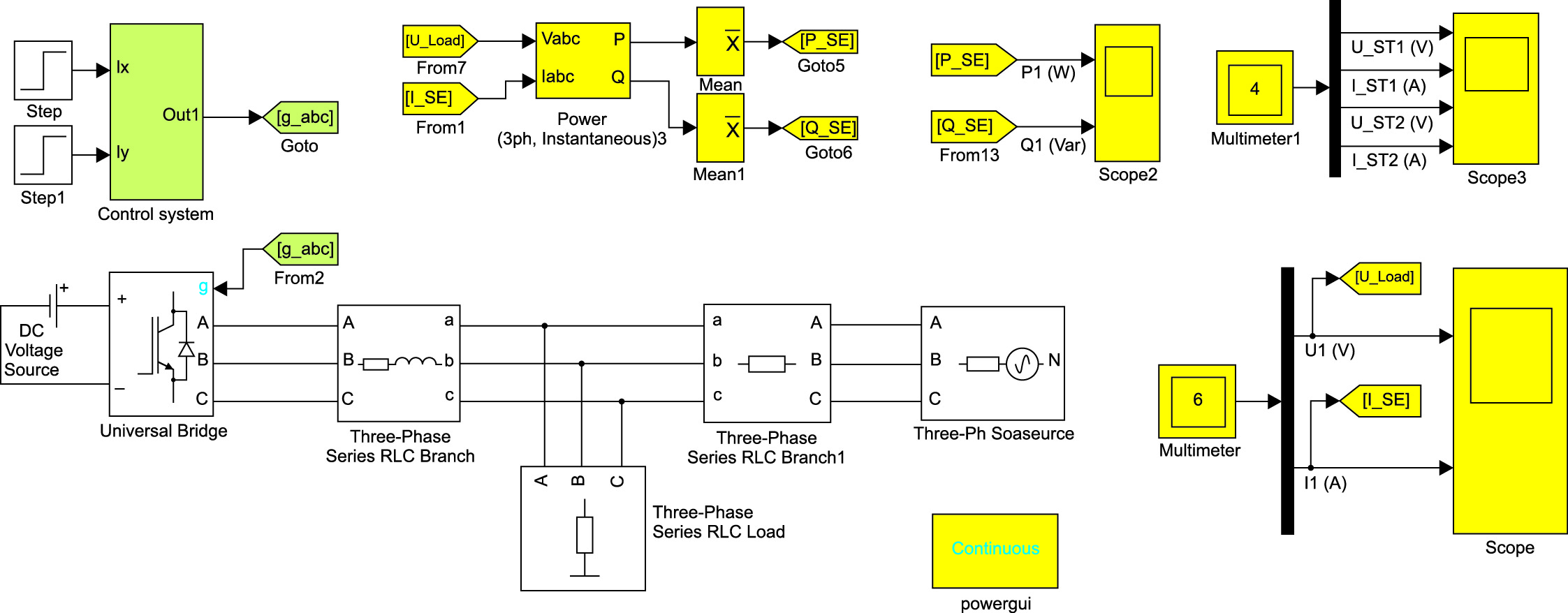
Рис. 12. Модель системы «сеть — АИ1»
Электромагнитные процессы в модели при обычном (не оптимизированном) режиме работы с активно-индуктивным током показаны на рис. 13, где представлены трехфазные напряжения и токи в сети (U1, I1) и токи в полупроводниковых ключах (I_ST1, I_ST2) одного плеча инвертора для Ipu = 0,5. На рис. 13 видно, что коммутационные процессы в схеме протекают без каких-либо временных перерывов (l = 0) в течение всего периода выходного тока.

Рис. 13. Электромагнитные процессы в сети и полупроводниковых ключах одного плеча инвертора при активно-индуктивном токе в сети
На всех осциллограммах, полученных на модели и приведенных ниже, независимой переменной на оси абсцисс является время в секундах.
Электромагнитные процессы в модели при активном токе в сети (при оптимизации потребления мощности из сети) для Ipu = 0,5 при работе инвертора в режиме активного выпрямителя показаны на рис. 14. Здесь видно, что коммутационные процессы в схеме отсутствуют на интервале, длительность которого составляет приблизительно 0,25 от периода (l = 0,25), что соответствует расчетам, приведенным на рис. 11.

Рис. 14. Электромагнитные процессы в сети и в полупроводниковых ключах одного плеча инвертора, работающего в режиме активного выпрямителя, в оптимизированной сети (Q1= 0)
Электромагнитные процессы в модели при активном токе в сети (при оптимизации потребления мощности из сети) для Ipu = 0,5 и работе АИ1 в режиме сетевого инвертора показаны на рис. 15. Можно наблюдать, что коммутационные процессы в схеме отсутствуют на интервале, длительность которого составляет приблизительно 0,33 от периода (l = 0,33), что также соответствует расчетам, приведенным на рис. 11.

Рис. 15. Электромагнитные процессы в сети и в полупроводниковых ключах одного плеча инвертора, работающего в режиме сетевого инвертора, в оптимизированной сети (Q1= 0)
Результаты моделирования системы «сеть — АИ1» при переходе из режима работы, соответствующего сетевому инвертору, в режим активного выпрямителя и оптимизации потребления мощности из сети (j = 0) представлены на рис. 16, 17. В установившихся режимах работы системы реактивная мощность в сети равна нулю (рис. 16). Изменение реактивной мощности наблюдается только во время переходного процесса при переходе из режима сетевого инвертора в режим активного выпрямителя.

Рис. 16. Активная и реактивная мощности в оптимизированной сети при переходе из режима сетевого инвертора в режим активного выпрямителя
На рис. 17 представлены напряжения и токи сети при переключении из режима сетевого инвертора в режим активного выпрямителя.Из рис. 17 видно, что в режиме сетевого инвертора ток и напряжение в сети находятся точно в противофазе, а в режиме активного выпрямителя — точно в фазе. По осциллограммам тока в сети можно проследить наличие интервалов, где отсутствует коммутация в соответствующей фазе инвертора. На этих интервалах нет пульсации тока в сети.

Рис. 17. Электромагнитные процессы в оптимизированной сети при переходе из режима сетевого инвертора в режим активного выпрямителя
Заключение
Анализ статических характеристик активного полупроводникового преобразователя, подключенного к «жесткой» электрической сети, показал, что алгоритм управления автономным инвертором оказывает существенное влияние на его энергетические характеристики. При поддержании определенного соотношения между управляющими сигналами на входе АИ1 можно существенно уменьшить реактивные токи в сети и потери в автономном инверторе. Особое значение оптимизация энергетических свойств электромеханических систем приобретает при построении мощных автономных и гибридных транспортных систем и систем полного электродвижения.
- Булгаков А. А. Новая теория управляемых выпрямителей. М.: Наука, 1970.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Виртуальные лаборатории устройств силовой электроники и электромеханики в среде Matlab+Simulink. Урок 24. Мехатронная система с магнитоэлектрическим генератором и активным полупроводниковым выпрямителем // Силовая электроника. 2018. №1.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Виртуальные лаборатории устройств силовой электроники и электромеханики в среде Matlab+Simulink. Урок 26. Оптимизация энергетических свойств мехатронной системы с вентильной электрической машиной // Силовая электроника. 2018. №3.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Виртуальные лаборатории устройств силовой электроники и электромеханики в среде Matlab+Simulink. Урок Синтез оптимального управления генераторной установкой с вентильной электрической машиной // Силовая электроника. 2019. №1.
- П. Машевич, В. Мартыненко,В. Мускатиньев, А. Бормотов и др. Исследования параметров и характеристик обогащенно-планарных IGBT с малыми потерями на напряжение 1200 В // Силовая электроника. 2013. № 4.
- Николаи У., Турски В., Райманн Т., перевод и комментарии А. Колпаков. Малоизвестные факты из жизни IGBT и диодов. Часть 2 // Силовая электроника. 2012. № 6.
- Ковач К. П., Рац И. Переходные процессы в машинах переменного тока/ Пер. с нем. М.-Л.: Госэнергоиздат, 1963.
- Колпаков А. И. Моделирование транзисторов IGBT с помощью PSPICE //Компоненты и технологии. 2002. № 8.
- Недолужко И., Лебедев А. Методика определения параметров PSPICE моделей IGBT транзисторов // Силовая электроника. 2005. №2.
- Розанов Ю. К. Силовая электроника. Москва. Издательский дом МЭИ, 2007.
- Соколовский Г. Г. Электроприводы переменного тока с частотным управлением. М.: Издательский центр «Академия». 2006.
- Cotorogea. Physics-Based SPICE-Model for IGBTs With Transparent Emitter // IEEE Trans. Power Electron., vol. 24, no. 12, p.p. 2821-2832, Dec. 2009.
- German-Galkin S., Tarnapowicz D. ENERGY OPTIMIZATION OF MECHATRONIC SYSTEMS WITH PMSG. 3rd International Conference on Energy and Environmental Protection . Krakow, Poland, September 13-14, 2018, p.p 1-8.
- Park R.H. Two-reaction theory of synchronous machines: Generalized method of analysis – part 1. Trans. of AIEE. July, 1929.
- N. López-Ortiz, D. Campos-Gaona, E.L. Moreno-Goytia. Modelling of a wind turbine with permanent magnet synchronous generator. IEEE 2012 North American Power Symposium (NAPS), Added to IEEE Xplore: 22 October 2012.
- Semken R. S., and all. Direct-drive permanent magnet generators for high-power wind turbines: benefits and limiting factors. Renewable Power Generation, IET , vol.6, no.1, pp.1-8, January 2012.
- Rossa, E. Krol. Modern electric machines with permanent magnet.Przegląd Elektrotechniczny, Volume 84, Issue 12.
- German-Galkin S., Tarnapowicz D., Tomasov V. S. The Use of Topology of IHBI Inverters in Parallel Operation of Ship Generating Sets With PMSG Generators. New Trends in Production Engineering, Volume 1: Issue 1, 10 Dec 2018.
- Chan T., Lai L. Permanent-Magnet Machines for Distributed Power Generation: A Review. IEEE Power Engineering Society General Meeting, Conference Location: Tampa, FL, Added to IEEE Xplore: 23 July 2007.
 30 августа, 2010
30 августа, 2010 29 марта, 2021
29 марта, 2021 5 декабря, 2019
5 декабря, 2019