
ШКОЛА MATLAB. Урок 28. Синтез оптимального управления генераторной установкой с вентильной электрической машиной
Введение
При построении генераторной установки на базе вентильной электрической машины (ВЭМ) достигнуты высокие энергетические показатели благодаря, главным образом, применению высокоэнергетических магнитных сплавов на роторе машины. Первостепенную актуальность вопросы энергоэффективности подобных систем приобретают при построении генераторных установок для автономных объектов, таких как гибридный автотранспорт, ветрогенераторы, авиационные и судовые генераторные установки, и других. Ниже рассмотрена система с двигателем внутреннего сгорания (ДВС), в которой электрический генератор выполнен на базе ВЭМ. В такой генераторной установке скорость вала поддерживается за счет регулятора скорости ДВС, при этом на выходе генератора поддерживается постоянная частота. В последние годы при построении энергетических систем все большее предпочтение отдается электрическим сетям постоянного тока [4, 5, 10, 14]. Не останавливаясь на всех достоинствах и недостатках электрических сетей переменного и постоянного тока, отметим лишь несколько особенностей последних:
- в сетях постоянного тока проще решаются проблемы разделения мощности между генераторами;
- в сетях постоянного тока проще решаются проблемы использования генераторов различного типа, работающих на одну сеть;
- в сетях постоянного тока проще решаются проблемы защиты людей от поражения электрическим током и объекта от пожаров и взрывов.
В статье исследуется мехатронная система, содержащая ВЭМ и активный выпрямитель (АВ). Эта система позволяет построить электрическую сеть постоянного тока, в которой постоянное напряжение нагрузки при ее изменении поддерживается либо за счет АВ [5] при индивидуальной работе всей установки, либо за счет параллельно подключенной мехатронной системы с асинхронным или синхронным генератором при совместной работе на одну сеть.
В статье описана возможность сокращения потерь в полупроводниковом преобразователе (АВ) и электрической машине путем регулирования реактивной мощности в контуре ВЭМ-АВ. Эти вопросы на практике решаются благодаря успехам в области электромеханики, полупроводниковой и микропроцессорной техники. Наиболее полно возможности повышения эффективности электромеханического преобразования энергии можно обеспечить путем оптимизации режимов работы АВ при регулировании напряжения или тока. Блок-схема всей генераторной установки приведена на рис. 1, где обозначены:
- ДВС — двигатель внутреннего сгорания;
- РСД — регулятор скорости ДВС;
- СММ — синхронная магнитоэлектрическая машина;
- АВ — активный выпрямитель;
- СУАВ — система управления активным выпрямителем;
- С, Н — конденсатор (накопитель) в цепи нагрузки (Н).
Функциональная схема ВЭМ при управлении от источника напряжения
Функциональная схема ВЭМ хорошо известна [1, 2, 12, 13], ее блок-схема обведена на рис. 1 пунктиром, а функциональная схема приведена на рис. 2 и содержит синхронную магнитоэлектрическую машину (СММ), силовой полупроводниковый преобразователь (СПП), играющий роль активного выпрямителя c системой управления (ШИМ), преобразователь координат (d,q_a,b,c) и датчик положения ротора (ДПР), образующие замкнутую мехатронную систему.

Рис. 1. Блок-схема генераторной установки

Рис. 2. Функциональная схема ВЭМ
Важно подчеркнуть, что характеристики ВЭМ зависят от всех перечисленных составляющих. Дальнейшие исследования, описанные ниже, осуществлены для лабораторной установки, параметры машины в которой приведены в таблице.
|
Параметр |
Значение |
|
Номинальный момент |
100 |
|
Номинальная скорость вращения, рад/с |
150 |
|
Сопротивление обмотки якоря, Ом |
0,6 |
|
Индуктивность обмотки якоря, Гн |
0,00635 |
|
Постоянная по ЭДС, Вс/рад |
0,987 |
|
Число пар полюсов |
2 |
|
Напряжение в звене пост. тока инвертора, В |
600 |
Математическое описание ВЭМ при управлении от источника напряжения
Электромагнитные процессы в системе могут быть исследованы на основании эквивалентной схемы замещения, представленной на рис. 3 [5]. В этой эквивалентной схеме замещения АВ представлен управляемым источником напряжения, который подключен параллельно статорным обмоткам ВЭМ с ЭДС (E1). Индуктивное и активное сопротивления в схеме замещения являются внутренними параметрами машины.

Рис. 3. Эквивалентная схема замещения системы
Математическое описание ВЭМ осуществляется в синхронно вращающейся системе координат (x, y) с использованием метода обобщенного (результирующего) вектора [9, 11, 17] и метода «гладкой составляющей» [3]. Это математическое описание имеет вид:

где Ē1(t) = j –Ψ0w(t) — пространственный (результирующий) вектор ЭДС на статорных обмотках ВЭМ; Ū1(t) — приведенный к цепи переменного тока пространственный вектор напряжения на выходе АВ; Ī1(t) — пространственный вектор тока в якоре машины; r, L1 — сопротивление и индуктивность фазной обмотки якоря машины; x1 = ωL1 — реактивное сопротивление фазы якоря машины; ω — угловая частота напряжения СПП.
В уравнениях (1) Ē1(t), Ū1(t), Ī1(t) — результирующие векторы напряжения якоря, тока якоря и потокосцеплениe поля возбуждения.
Заметим, что запись переменных состояния как функций времени в уравнениях (1) подчеркивает то обстоятельство, что эти величины являются постоянными с изменяющимися во времени значениями. Изменение этих значений наблюдается во время переходных процессов. В квазиустановившемся режиме система уравнений (1) преобразуется к виду:
![]()
В матописании ВЭМ (2) переменные состояния являются величинами векторными, что требует для оценки энергетических свойств ВЭМ использовать векторную диаграмму. При построении векторной диаграммы по уравнению (2) электромагнитные процессы в СММ рассматриваются в системе вращающихся координат (d, q), связанных с конструкцией машины [9, 17], а электромагнитные процессы в АВ рассматриваются во вращающейся системе координат x, y, связанных с напряжением и током в нагрузке. При этом вектор потокосцепления Ψ0 совмещается с нулевым состоянием ДПР и направляется по вещественной оси (d), вращающейся со скоростью системы координат. В этом случае ЭДС E1 = jΨ0ω вращения опережает потокосцепление на 90° эл. и будет направлена по мнимой оси q. Поэтому при построении векторной диаграммы следует учитывать и то обстоятельство, что направление одного из векторов состояния (напряжения или тока) определяется начальной установкой ДПР.
Векторная диаграмма отражает физику работы ВЭМ и позволяет качественно оценить свойства генератора, которые зависят как от параметров самой машины, так и от способа построения и алгоритма управления активным выпрямителем.
Ниже рассматриваются два способа управления машиной. При первом способе активный выпрямитель выполняет функцию регулируемого источника напряжения. При втором способе активный выпрямитель выполняет функцию регулируемого источника тока.
Анализ ВЭМ при амплитудно-фазовом управлении от источника напряжения
Для амплитудно-фазового управления от источника напряжения векторная диаграмма ВЭМ в генераторном режиме приведена на рис. 4.

Рис. 4. Векторная диаграмма генератора с ВЭМ при амплитудно-фазовом управлении от источника напряжения
При амплитудно-фазовом управлении изменяется величина вектора Ū1 и его фаза φm по отношению к ЭДС машины (рис. 4). В реальных системах такой алгоритм управления реализуется методом модуляции пространственного вектора (SVC — space vector control). Напряжение Ū1 АВ при таком управлении равно:

в котором m — коэффициент модуляции, изменяемый в диапазоне 0 ≤ m ≤ 1; φm — фаза модуляции (фаза между вектором напряжения Ū1 и вектором Ē1), Udc — напряжение на выходе, в звене постоянного тока АВ.
Математическое описание ВЭМ в установившемся режиме работы при таком способе управления, представленное в осях d, q, выражается уравнениями:

Токи продольной, поперечной составляющей в машине (в осях d, q) определяются из уравнений:

где
![]()
Энергетические характеристики генераторной установки с ВЭМ при амплитудно-фазовом управлении от источника напряжения
Энергетические характеристики ВЭМ рассчитываются по уравнениям:

Программа расчета энергетических характеристик, составленная по уравнениям (4–6), приведена в листинге 1.
Листинг 1.
F0=310/314; R=0.6; p=2; Ld=0.00635;
Lq=0.00635;
Td=Ld/R;Tq=Lq/R;
Udc=600;
[Fim,m]=meshgrid([0:0.01:1]);
wm=150;
U1=310.*m;
w=p.*wm;
x=w.*Ld;
z=sqrt(R^2*x^2);
Ud=U1.*sin(Fim);
Uq=U1.*cos(Fim);
Id=(-Ud.*R+(w.*F0-Uq).*x)./z.^2;
Iq=(Ud.*x+(w.*F0-Uq).*R)./z.^2;
m1=1.5*p*(Ld-Lq)*Id.*Iq;
M=1.5*p*F0.*Iq;
Moment=M+m1;
I1=sqrt(Id.^2+Iq.^2);
P1=(Id.*Ud+Iq.*Uq).*3/2;
Q1=(Id.*Uq-Iq.*Ud).*3/2;
Pm=wm.*Moment;
meshc(Fim,m,Q1);
grid on;
xlabel('Fi_m (rad)');
ylabel('m');
zlabel('Q1 (VAr)');
На рис. 5 и 6 приведены результаты расчета энергетических характеристик ВЭМ при управлении от источника напряжения, которые представлены зависимостями активной и реактивной мощности от управляющих сигналов (коэффициента модуляции и фазы модуляции). Проекции поверхности мощности на основную плоскость представляют собой зависимости между управляющими сигналами, при которых мощность постоянна.

Рис. 5. Энергетические характеристики генератора с ВЭМ при амплитудно-фазовом управлении от источника напряжения

Рис. 6. Энергетические характеристики генератора с ВЭМ при амплитудно-фазовом управлении от источника напряжения
Полученные энергетические характеристики позволяют оценить свойства системы, которые состоят в следующем:
- для обеспечения постоянной мощности в нагрузке ВЭМ в генераторном режиме необходимо поддерживать определенную нелинейную зависимость между коэффициентом модуляции и фазой модуляции;
- реактивная мощность в нагрузке ВЭМ соизмерима с активной мощностью, что вызывает увеличение полного тока и потерь в полупроводниковых приборах АВ и обмотках СММ;
- для обеспечения в нагрузке ВЭМ нулевой реактивной мощности необходимо поддерживать определенную нелинейную зависимость между коэффициентом модуляции и фазой модуляции;
- диапазон изменения управляющих сигналов при нулевой реактивной мощности в нагрузке ВЭМ ограничен значениями (1 > m > 0; 0,75 > φm > 0);
- зависимость между коэффициентом модуляции и фазой модуляции, при которых реактивная мощность в нагрузке ВЭМ поддерживается равной нулю, может быть представлена приближенным выражением m ≈ 1–0,75 φm.
Анализ и энергетические характеристики оптимизированной генераторной установки с ВЭМ при амплитудно-фазовом управлении от источника напряжения
Характеристики, приведенные на рис. 5, 6, свидетельствуют о том, что реактивная мощность в нагрузке ВЭМ может поддерживаться равной нулю при реализации определенной (нелинейной) зависимости управляющих воздействий. В связи с этим возникает вопрос о нахождении этих зависимостей между сигналами управления.
Аналитическое решение данной задачи было осуществлено в [5] применительно к электроприводу с ВЭМ. Здесь это решение осуществим другим способом, опираясь на геометрические соотношения векторной диаграммы. Векторная диаграмма, демонстрирующая режим работы генератора при нулевой реактивной мощности в нагрузке ВЭМ, показана на рис. 7.

Рис. 7. Векторные диаграммы в системе при нулевой реактивной мощности в нагрузке ВЭМ при управлении от источника напряжения
Из геометрических соотношений векторной диаграммы найдем значения напряжений в осях d, q:

При поддержании соотношения (7) по уравнениям (6) рассчитываются оптимизированные энергетические характеристики генератора с ВЭМ при амплитудно-фазовом управлении от источника напряжения. Программа расчета приведена в листинге 2.
Листинг 2.
F0=310/314; R=0.6; p=2; Ld=0.00635;
Lq=0.00635;
Udc=600;
[Fim,m]=meshgrid([0:0.01:1]);
wm=150;
w=p.*wm;
x=w.*Ld;
z=sqrt(R^2*x^2);
Ud=(-(F0*R/Ld).*sin(Fim)+w*F0.*cos(Fim)).*sin(Fim);
Uq=(-(F0*R/Ld).*sin(Fim)+w*F0.*cos(Fim)).*cos(Fim);
Id=(-Ud.*R+(w.*F0-Uq).*x)./(z.^2);
Iq=(Ud.*x+(w.*F0-Uq).*R)./(z.^2);
M=1.5*p*F0.*Iq;
I1=sqrt(Id.^2+Iq.^2);
P1=(Id.*Ud+Iq.*Uq).*3/2;
Q1=(Id.*Uq-Iq.*Ud).*3/2;
Pm=wm.*M;
meshc(Fim,m,P1);
grid on;
xlabel('Fi_m (rad)');
ylabel('m');
zlabel('P1 (W)');
Рассчитанные оптимизированные энергетические характеристики генератора с ВЭМ приведены на рис. 8 и 9.
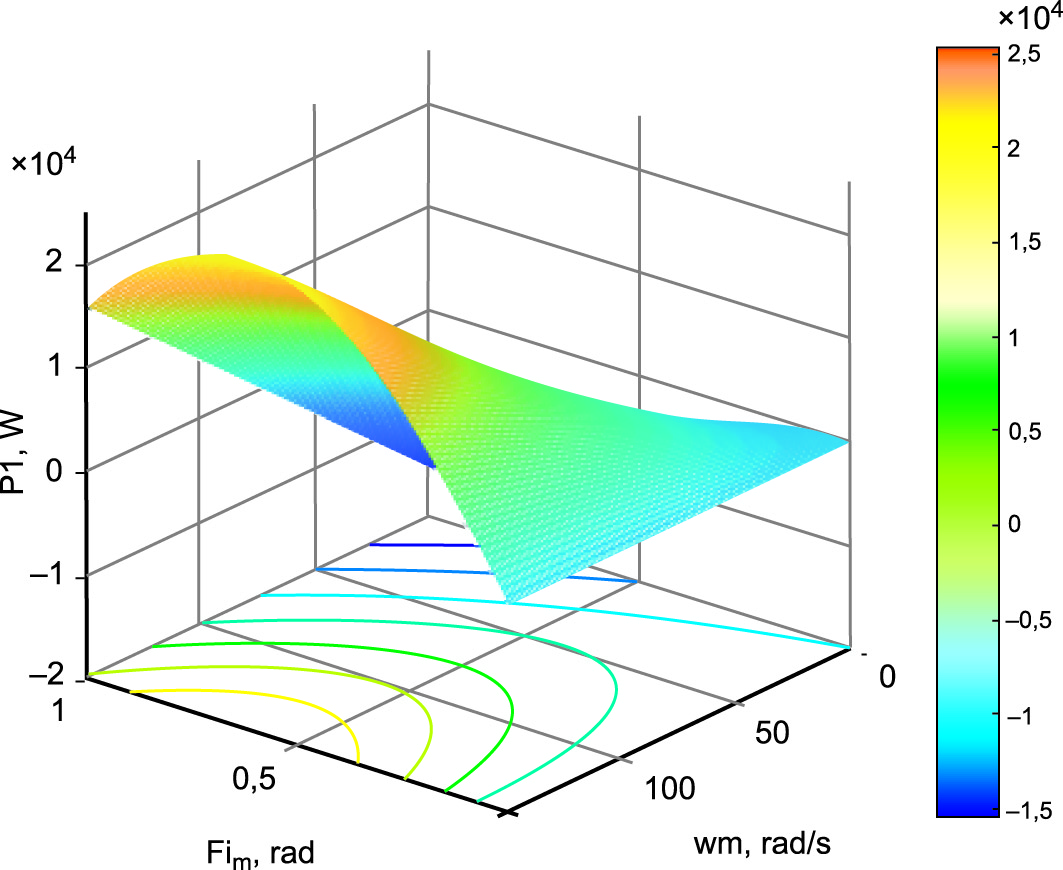
Рис. 8. Оптимизированные энергетические характеристики генератора при амплитудно-фазовом управлении от источника напряжения

Рис. 9. Оптимизированные энергетические характеристики генератора при амплитудно-фазовом управлении от источника напряжения
Энергетические характеристики (рис. 8, 9) свидетельствуют о том, что при поддержании зависимости (7) реактивная мощность в нагрузке ВЭМ равна нулю во всем диапазоне изменения управляющих сигналов.
Функциональная схема, анализ и энергетические характеристики генераторной установки с ВЭМ при амплитудно-фазовом управлении от источника тока
Функциональная схема генератора с ВЭМ при амплитудно-фазовом управлении от источника тока приведена на рис. 10. В сравнении с функциональной схемой (рис. 2) она дополнительно содержит гистерезисные регуляторы тока и датчики фазных токов (ДТ), образующие замкнутую релейную систему, обеспечивающую токовое управление синхронной магнитоэлектрической машиной (СММ).

Рис. 10. Функциональная схема генератора с ВЭМ при амплитудно-фазовом управлении от источника тока
Если в силовом полупроводниковом преобразователе используется токовое управление, то сигналами управления (задания) являются токи I*d и I*q, а продольная и поперечная составляющие напряжения определяются из уравнений:

Энергетические характеристики ВЭМ с рассмотренным управлением АВ рассчитываются по уравнениям (6). Программа расчета энергетических характеристик ВЭМ при управлении от источника тока приведена в листинге 3.
Листинг 3.
F0=310/314; R=0.6; p=2; Ld=0.00635;
Lq=0.00635;
wm=150;
Udc=600;
[Id,Iq]=meshgrid([0:0.5:100]);
w=p.*wm;
Ud=-R.*Id+w.*Lq*Iq;
Uq=-R.*Iq-w.*Ld*Id+F0.*w;
M=1.5*p*F0*Iq;
m=1.5*p*(Ld-Lq)*Id.*Iq;
Moment=M+m;
I1=sqrt(Id.^2+Iq.^2);
P1=(Id.*Ud+Iq.*Uq).*3/2;
Q1=(Id.*Uq-Iq.*Ud).*3/2;
Pm=wm.*Moment;
meshc(Id,Iq,Q1);
grid on;
xlabel('Id (A)');
ylabel('Iq (A)');
zlabel('P1 (W)');
На рис. 11 и 12 приведены результаты расчета энергетических характеристик ВЭМ, которые представлены зависимостями активной и реактивной мощности на выходе ВЭМ от управляющих сигналов. Проекции поверхности мощности на основную плоскость представляют зависимости между этими управляющими сигналами, при которых мощность постоянна.

Рис. 11. Энергетические характеристики генератора при амплитудно-фазовом управлении от источника тока

Рис. 12. Энергетические характеристики генератора при амплитудно-фазовом управлении от источника тока
Полученные энергетические характеристики при токовом управлении ВЭМ позволяют оценить свойства системы, которые сводятся к следующим:
- активная мощность в нагрузке ВЭМ в генераторном режиме в основном зависит от составляющей тока Iq и незначительно — от составляющей Id;
- реактивная мощность в нагрузке ВЭМ соизмерима с активной мощностью, что вызывает увеличение полного тока и потерь в полупроводниковых приборах АВ и обмотках СММ;
- для поддержания в нагрузке ВЭМ нулевой реактивной мощности необходимо поддерживать определенную нелинейную зависимость между токами Id и Iq;
- диапазон изменения управляющего сигнала Iq при нулевой реактивной мощности в нагрузке ВЭМ для выбранной машины ограничен значением Iq ≤ 70 A;
- при управлении только по активной составляющей (Id = 0) реактивная мощность во всем диапазоне изменения Iq остается отрицательной. В этом случае АВ для СММ представляет собой активно-емкостную нагрузку.
Энергетические характеристики оптимизированной генераторной установки с ВЭМ при амплитудно-фазовом управлении от источника тока
Если в силовом полупроводниковом преобразователе предусмотрено токовое управление, то, пользуясь уравнениями (4, 6) или геометрическими построениями (рис. 7), можно определить продольную и поперечную составляющие токов, при которых реактивная мощность на выходе ВЭМ равна нулю.

В рассматриваемом случае, как это видно из уравнений (9), управляющими сигналами являются фаза модуляции и скорость вращения вала машины. Расчет энергетических характеристик генератора при таком управлении осуществляется по уравнениям (6, 8, 9). Программа расчета представлена листингом 4.
Листинг 4.
F0=310/314; R=0.6; p=2; Ld=0.00635;
Lq=0.00635;
[Fim,wm1]=meshgrid([0:0.01:1]);
wm=wm1.*150;
w=wm.*p;
I1=(F0/Ld)*sin(Fim);
Id=I1.*sin(Fim);
Iq=I1.*cos(Fim);
Ud=-R.*Id+(w.*Lq).*Iq;
Uq=-R.*Iq+F0.*w-(w.*Lq).*Id;
M=1.5*p*F0*Iq;
m=1.5*p*(Ld-Lq)*Id.*Iq;
Moment=M+m;
P1=(Id.*Ud+Iq.*Uq).*3/2;
Q1=(Id.*Uq-Iq.*Ud).*3/2;
Pm=wm.*Moment;
meshc(Fim,wm,Q1);
grid on;
xlabel('Fi_m (rad');
ylabel('wm (rad/s)');
zlabel('Q1 (VAr)');
Из уравнений (9) следует, что токи, при которых реактивная мощность равна нулю, зависят только от фазы модуляциии. Рассчитанные и построенные энергетические характеристики системы представлены на рис. 13 и 14, из которых следует, что:
- при поддержании зависимости (9) реактивная мощность на выходе ВЭМ равна нулю во всем диапазоне изменения управляющих сигналов;
- при поддержании зависимости (9) активная мощность на выходе ВЭМ может оставаться постоянной при существенно нелинейной зависимости между фазой модуляции и скоростью вращения вала машины;
- при увеличении мощности на выходе ВЭМ сокращается допустимый диапазон изменений сигналов управления.

Рис. 13. Оптимизированные энергетические характеристики генератора при амплитудно-фазовом управлении от источника тока

Рис. 14. Оптимизированные энергетические характеристики генератора при амплитудно-фазовом управлении от источника тока
Модельное исследование генераторной установки с ВЭМ
Экспериментальное исследование замкнутой системы управления генератором выполнено в среде Matlab-Simulink. Модель генератора с ВЭМ приведена на рис. 15.

Рис. 15. Модель генератора с ВЭМ
В рассматриваемой структуре ДВС генераторной установки управляется от регулятора скорости. В этом режиме скорость вала ВЭМ задана, и основным требованием к ее электрической части является поддержание неизменного напряжения Udc в звене постоянного тока при изменении электрической нагрузки.
Стабилизация напряжения Udc осуществляется в классической системе подчиненного управления с ПИД-регулятором, на выходе которого формируется заданный сигнал управления, который подается на функциональные преобразователи (Fcn6, Fcn7, рис. 15). В этих преобразователях рассчитываются задающие токи I*d, I*q по уравнению (9). Фаза модуляции определяется в блоке Fcn10 по уравнению:
Проведено сравнение системы с независимым токовым управлением, которая описывается уравнением (8) при задании I*d = 0, и с оптимизированным токовым управлением, которая описывается уравнением (9).
На рис. 16 и 17 представлены результаты моделирования обеих систем в переходных (наброс нагрузки) и установившихся (работа под постоянной нагрузкой) режимах работы генераторной установки с ВЭМ. Кривые (рис. 16, 17) демонстрируют поведение активной и реактивной мощности на выходе ВЭМ. В установившемся режиме работы под нагрузкой в системе с независимым токовым управлением (I*d = 0, I*q = var) реактивная мощность ВЭМ составляет приблизительно треть от активной мощности (рис. 16).

Рис. 16. Энергетические процессы в генераторе с ВЭМ при набросе нагрузки
В оптимизированной системе в момент наброса нагрузки наблюдаются кратковременные изменения реактивной мощности. В установившемся режиме эта мощность практически равна нулю (рис. 17). Электромагнитные процессы в обеих системах протекают одинаково (рис. 18), они представлены токами в статоре машины, током нагрузки в звене постоянного тока АВ (Idc) и напряжением в звене постоянного тока АВ (Udc). Процессы, представленные на рис. 18, свидетельствуют о том, что в оптимизированной системе изменение электрической нагрузки генератора не влияет на напряжение Udc.

Рис. 17. Энергетические процессы в оптимизированном генераторе с ВЭМ при набросе нагрузки

Рис. 18. Электромагнитные процессы в генераторе с ВЭМ при набросе нагрузки
В случае использования установки в качестве валогенератора скорость вращения СММ может изменяться. На рис.19 и 20 показаны энергетические и электромагнитные процессы в оптимизированном генераторе с ВЭМ при сбросе скорости от 150 до 100 рад/с.

Рис. 19. Энергетические процессы в оптимизированном генераторе с ВЭМ при сбросе скорости от 150 до 100 рад/с

Рис. 20. Электромагнитные процессы в оптимизированном генераторе с ВЭМ при сбросе скорости от 150 до 100 рад/с
Здесь, так же, как и в предшествующих модельных экспериментах, в установившемся режиме работы генератора реактивная мощность на выходе СММ равна нулю. При этом мощность в нагрузке генератора не зависит от скорости вращения его вала. Результаты моделирования показывают, что генераторная установка с ВЭМ обеспечивает основное требование — поддержание неизменного напряжения при изменении тока (мощности) в нагрузке и дополнительного требования — поддержание постоянного напряжения нагрузки при изменении скорости вращения вала. Кроме того, при оптимальном управлении, соответствующем уравнению (9), реактивный ток в машине снижается до нуля, что уменьшает потери в активных сопротивлениях машины и активного выпрямителя.
Заключение
Анализ энергетических характеристик генератора с ВЭМ продемонстрировал, что алгоритм управления АВ оказывает на них существенное влияние. При определенном соотношении между амплитудой и фазой напряжения (тока) на стороне переменного тока АВ можно в несколько раз уменьшить реактивные токи и, соответственно, потери в преобразователе и машине. Особое значение оптимизация энергетических свойств генераторных установок приобретает при построении мощных гибридных транспортных систем и систем полного электродвижения, имеющих различные, сопоставимые по мощности источники электрической энергии, работающие на одну общую изменяющуюся нагрузку. Примерами таких объектов является сухопутный, морской, речной и воздушный транспорт, а примерами таких источников электрической энергии — дизель-генераторы, валогенераторы, паро- и турбогенераторы, аккумуляторы, суперконденсаторы и другие устройства и механизмы.
Проблемы оптимального проектирования обозначенных систем включают следующие задачи:
- Конструктивную и технологическую оптимизацию электрических машин, включающую переход к модульным конструкциям с использованием новых материалов с запасенной магнитной энергией (самарий-кобальт, неодим-железо — бор).
- Разработку электромеханических модулей, объединяющих электрические машины, элементы силовой электроники и микропроцессорной техники, позволяющие оптимизировать динамические и энергетические характеристики систем, объединить в общую сеть источники энергии с различными параметрами и исключить обменные колебательные мощностные процессы.
- Создание интеллектуальных систем и сетей (Smart Grid), оптимизированных по энергетическим и динамическим характеристикам.
Теоретической основой решения перечисленных проблем, связанных с оптимальным проектированием мехатронных систем автономных объектов, были и остаются классические труды российских и зарубежных ученых в области электротехники, электромеханики и теории автоматического управления. На этой теоретической базе с использованием современных компьютерных технологий следует решать перечисленные научные и практические проблемы, не только широко освещать эти решения в научных трудах, но и использовать их в образовательных курсах для студентов, аспирантов и молодых специалистов.
- Аракелян А. К., Афанасьев А.А. Вентильные электрические машины в системах регулируемых электроприводов. М.: Высшая школа, 2006.
- Бродовский В. Н., Иванов Е. С. Приводы с частотно-токовым управлением. М.: Энергия, 1974.
- Булгаков А. А. Новая теория управляемых выпрямителей. М.: Наука, 1970.
- Васьков А. Г., Тягунов М. Г. Распределенные системы энергоснабжения на основе гибридных энергокомплексов с установками возобновляемой энергетики // Новое в российской электроэнергетике. 2013. № 4.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Урок 24. Мехатронная система с магнитоэлектрическим генератором и активным полупроводниковым выпрямителем // Силовая электроника. 2018. № 1.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Урок 25. Мехатронная система с двумя генераторами в общей электрической сети переменного тока // Силовая электроника. 2018. № 2.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Урок 26. Оптимизация энергетических свойств мехатронной системы с вентильной электрической машиной // Силовая электроника. 2018. № 3.
- Герман-Галкин С., Тарнапович Д. ШКОЛА MATLAB. Урок 27. Система управления возбуждением синхронного магнитоэлектрического генератора // Силовая электроника. 2018. № 5.
- Горев А. А. Переходные процессы синхронной машины. М.-Л.: Госэнергоиздат, 1950.
- Зотин О. В преддверии возрождения постоянного тока // Силовая электроника. 2013. № 4.
- Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. Пер. с нем. М.-Л.: Госэнергоиздат, 1963.
- Овчинников И. Е. Вентильные электрические двигатели и привод на их основе (малая и средняя мощность). Курс лекций. СПб.: КОРОНА-Век, 2006.
- Соколовский Г. Г. Электропривод переменного тока с частотным регулированием. М.: ACADEMIA, 2006.
- Соснина Е. Н., Шалухо А. В., Липужин И.А. Simulink-модель ветродизельной электростанции с вставкой постоянного тока. Сборник статей Всеросс. науч.-техн. конф. «Актуальные проблемы электроэнергетики». Нижний Новгород, 2015.
- Токарев Л.Н. Математическое описание, расчет и моделирование физических процессов в судовых электростанциях. Л.: Судостроение, 1980.
- Ясаков Г. С. Корабельные электроэнергетические системы. Часть 1. СПб., Военно-морская академия им. Адмирала Флота Советского Союза Н.Г. Кузнецова, 1999.
- Park R. H. Two-reaction theory of synchronous machines: Generalized method of analysis. Part 1. Trans. of AIEE. July 1929.
 4 декабря, 2020
4 декабря, 2020 20 ноября, 2020
20 ноября, 2020 4 октября, 2007
4 октября, 2007