
Школа MATLAB. Урок 25. Мехатронная система с двумя генераторами в общей электрической сети переменного тока
Введение
В статье рассматривается энергетическая система, в которой синхронный магнитоэлектрический генератор (СМГ) с изменяющейся скоростью вращения работает параллельно с электромагнитным генератором (СГ) с постоянной скоростью вращения на одну электрическую сеть. Такие системы применяются в судовых электрических сетях, где СМГ связан с валом винта судна, в авиационных системах, в разветвленных автономных электрических сетях с ветрогенераторами и т. д. Решение вопросов, связанных с проблемами работы различных источников на одну электрическую сеть, имеет прямое отношение к созданию так называемых интеллектуальных («умных») электрических сетей (Smart grid) [6, 9, 12–15, 19].
В публикации исследования осуществлены применительно к судовой электрической сети, в которой одним источником энергии является дизель-генератор, а другим — валогенератор.
Блок-схема
Блок-схема системы, представленная на рис. 1, содержит:
- Дизель-генератор, включающий двигатель внутреннего сгорания (ДВС) с регулятором скорости дизеля (РСД), и синхронный генератор (СГ) с электромагнитным возбуждением и регулятором напряжения (РН).
- Валогенератор, механически связанный с валом (В) судна, включающий синхронный магнитоэлектрический генератор (СМГ), активный выпрямитель (АВ) с системой управления (СУАВ).
- Автономный инвертор (АИ) со схемой управления (СУАИ).
- Судовую сеть переменного тока (220/380 В 50 Гц) с изменяющейся нагрузкой (Н).

Рис. 1. Блок-схема мехатронной системы с двумя генераторами
Напряжение на выходе СМГ изменяется пропорционально его скорости вращения. Для поддержания неизменного напряжения в сети переменного тока к СМГ валогенератора подключены активный выпрямитель (АВ) и автономный инвертор (АИ), связанные звеном постоянного тока. Активный выпрямитель поддерживает неизменным напряжение в звене постоянного тока при изменении напряжения на выходе СМГ, а автономный инвертор поддерживает постоянную частоту в сети и обеспечивает суммирование мощностей двух генераторов. Обведенная пунктиром часть блок-схемы (МССМГАВ) исследована в предыдущем уроке [8], где показано, что в ней напряжение на выходе АВ поддерживается неизменным при изменении скорости вращения СМГ и нагрузки в определенном, ограниченном диапазоне.
В рассматриваемой судовой электрической сети исследуются электромагнитные и энергетические процессы при разделе мощности между генераторами и при переключении всей нагрузки с одного генератора на другой.
При таком анализе исследователь сталкивается с проблемой суммирования мощностей двух (иногда более) источников переменного напряжения. Суммирование мощностей двух (или более) источников энергии имеет давнюю историю [2, 11, 17, 20, 21]. Когда эти источники являются источниками напряжения, в таких системах возникают колебательные процессы, при которых источники обмениваются активными и реактивными мощностями помимо нагрузки.
Проблемы суммирования мощностей двух и более источников решаются значительно проще, когда один является источником напряжения (master mode), а другой (или другие) — источником тока (slave mode). В рассматриваемой системе источник тока легко реализуется на автономном инверторе при токовом управлении [7]. Причем ток на выходе АИ (рис. 1) управляется как по величине, так и по фазе, что позволяет генерировать в нагрузку активную и реактивную мощность и управлять этими мощностями.
При построении энергетических установок для автономных и неавтономных объектов первостепенное значение приобретают задачи оптимизации энергетических характеристик. Эти задачи на практике решаются благодаря успехам в области электромеханики, полупроводниковой и микропроцессорной техники. Их реализация базируется на анализе электромагнитных процессов в рассматриваемых системах.
Анализ
Базой аналитических методов данного класса систем служат теоретические положения, изложенные в классических трудах по электрическим машинам и полупроводниковым преобразователям, управляющим их работой [1, 3, 5, 7, 10, 16, 18, 21, 22].

Рис. 2. Эквивалентная схема замещения системы
При этом исследование электромагнитных и энергетических процессов необходимо осуществлять с различной степенью упрощения в зависимости от решаемых задач [21].
Ниже эти задачи описаны без учета демпферных обмоток СГ, апериодических составляющих токов статора СГ и изменения скорости вращения вала СГ.
При таком исследовании систему координат удобно связать с продольной (d) и поперечной (q) координатами синхронной машины, вращающихся с синхронной скоростью (w =pw m = const). В этом случае вектор потокосцепления возбуждения совпадает с осью d, а вектор эдс синхронной машины — с осью q.
При построении схемы управления АИ, рассчитанным на работу с изменяющейся нагрузкой, управление инвертором организуется в синхронно вращающейся системе координат (d, q), с релейной отрицательной обратной связью по составляющим Id, Iq [1, 7]. Такое управление получило название «токовый коридор».
Электромагнитные процессы в системе при учете оговоренных выше допущений могут быть исследованы на основании эквивалентной схемы, представленной на рис. 2.
В этой эквивалентной схеме замещения автономный инвертор (АИ) представлен управляемым источником тока J, который подключен параллельно нагрузке и статорным обмоткам синхронного генератора с неизменной эдс (E1). Индуктивное и активное сопротивления в схеме замещения являются внутренними параметрами СГ.
Математическое описание системы во вращающейся синхронно с валом СГ системе координат может быть представлено в виде:

где –E1(t) — пространственный (результирующий) вектор эдс на статорных обмотках СГ дизель-генератора; –U1(t) — пространственный вектор напряжения на нагрузке; –I1(t) — пространственный вектор тока в якоре СГ дизель-генератора; –I1d(t), –I1q(t) — пространственный вектор токов СГ в осях d, q; –J(t) — пространственный вектор первой гармоники тока, генерируемый инвертором; –IL(t) — пространственный вектор тока в нагрузке; xd = x + xad = w(L + Ld), xq = x + xaq = w(L + Lq), — реактивные параметры СГ по продольной и поперечной осям; r — активное сопротивление синхронного генератора (СГ).
Заметим, что запись –E1(t), –U1(t), –I1(t), –I1d(t), –I1q(t), –J(t) и т. д. в уравнениях (1) подчеркивает то обстоятельство, что эти величины являются постоянными с изменяющимися во времени значениями. Изменения значений токов, напряжений и эдс наблюдаются во время переходных процессов.
В установившемся режиме, при учете соотношения r<< xd, r<< xq [5], система уравнений (2) преобразуется к виду:
![]()
Наличие управляемого по величине и фазе источника тока позволяет разгрузить СГ дизель-генератора либо от части активного и реактивного тока, либо при необходимости от полного или активного тока и тем самым переключить нагрузку на валогенератор. Ниже физика работы двух генераторов на общую нагрузку анализируется с использованием векторных диаграмм, построенных на основании уравнений (2). В качестве примеров рассмотрены режим равенства нагрузки на дизель-генератор и валогенератор и режимы, когда вся активная нагрузка, а также когда вся нагрузка включена на валогенератор.
В случае равенства активной и реактивной нагрузки на дизель-генератор и валогенератор связь токов нагрузки, генератора и источника тока (автономного инвертора) имеет вид:

Для этого примера по уравнениям (2) на рис. 3а построена векторная диаграмма в синхронно вращающейся системе координат. В данном случае оси d, q СГ смещены относительно осей x, y, связанных с напряжением на нагрузке.

Рис. 3. Векторные диаграммы системы «СГ-АИ»
Величина угла смещения α определяет активную мощность, отдаваемую СГ в общую сеть [5], а значение этого угла равно:

Когда вся активная нагрузка включена на валогенератор, угол α = 0, связь токов нагрузки, СГ дизель-генератора и источника тока (автономного инвертора) принимает вид:
![]()
Векторная диаграмма в синхронно вращающейся системе координат для этого случая построена на рис. 3б.
Когда вся нагрузка включена на валогенератор, связь токов нагрузки, СГ дизель-генератора и источника тока (автономного инвертора) принимает вид:
![]()
а векторная диаграмма в синхронно вращающейся системе координат для этого случая построена на рис. 3в.
Из представленных векторных диаграмм следует, что наличие активного тока в якоре СГ приводит к смещению систем координат d, q СГ и x, y, что следует учитывать при построении системы управления инвертором.
Моделирование
Далее рассматривается система с синхронным явнополюсным дизель-генератором с электромагнитным возбуждением 50 Гц 400 В 85 кВ·А 1500 RPM, параметры генератора приведены в таблице 1. Параметры нагрузки в общей сети следующие: PLoad = 50 кВт, QLoad = 20 кВ·А.
Виртуальная модель рассматриваемой мехатронной системы приведена на рис. 4. В ней вся математика энергетической подсистемы «спрятана» в виртуальных блоках пакета Sim Power System. В блоках управления АИ реализуется преобразование Парка — Горева [10] для привязки управления инвертором к осям d, q СГ. В управляющей части модели задаются токи инвертора в координатах d, q, первая из которых в определенном масштабе есть реактивная мощность, а вторая — активная мощность в нагрузке. В блоке Control System, модель которого показана на рис. 5, реализована модель мехатронной системы с магнитоэлектрическим генератором и активным полупроводниковым выпрямителем, разработанная и исследованная в [8].

Рис. 4. Модель системы

Рис. 5. Модель мехатронной системы с магнитоэлектрическим генератором и активным полупроводниковым выпрямителем
При представлении результатов моделирования введены следующие обозначения: U_Load, I_Load, P_Load, Q_Load — напряжение, ток, активная и реактивная мощность в нагрузке; U_GS, I_GS, P_GS, Q_GS — напряжение, ток, активная и реактивная мощность СГ дизель-генератора; U_FP, I_FP, P_FP, Q_FP — напряжение, ток, активная и реактивная мощность АИ валогенератора.
Заданием токов инвертора в осях d, q СГ осуществляется управление мощностью АИ. При этом мощность от СГ дизель-генератора автоматически изменяется в соответствии с выражениями:
P_GS = P_Load – P_FP,
Q_GS = Q_Load – Q_FP. (7)
Результаты моделирования представлены на рис. 6–8.
На рис. 6 отображен режим подключения и отключения подсистемы МССМГАВ (рис. 1) на половину активной и реактивной мощности нагрузки. В этом случае активная и реактивная мощности разделяются поровну между генераторами, а переходные энергетические и электромагнитные процессы близки апериодическим.
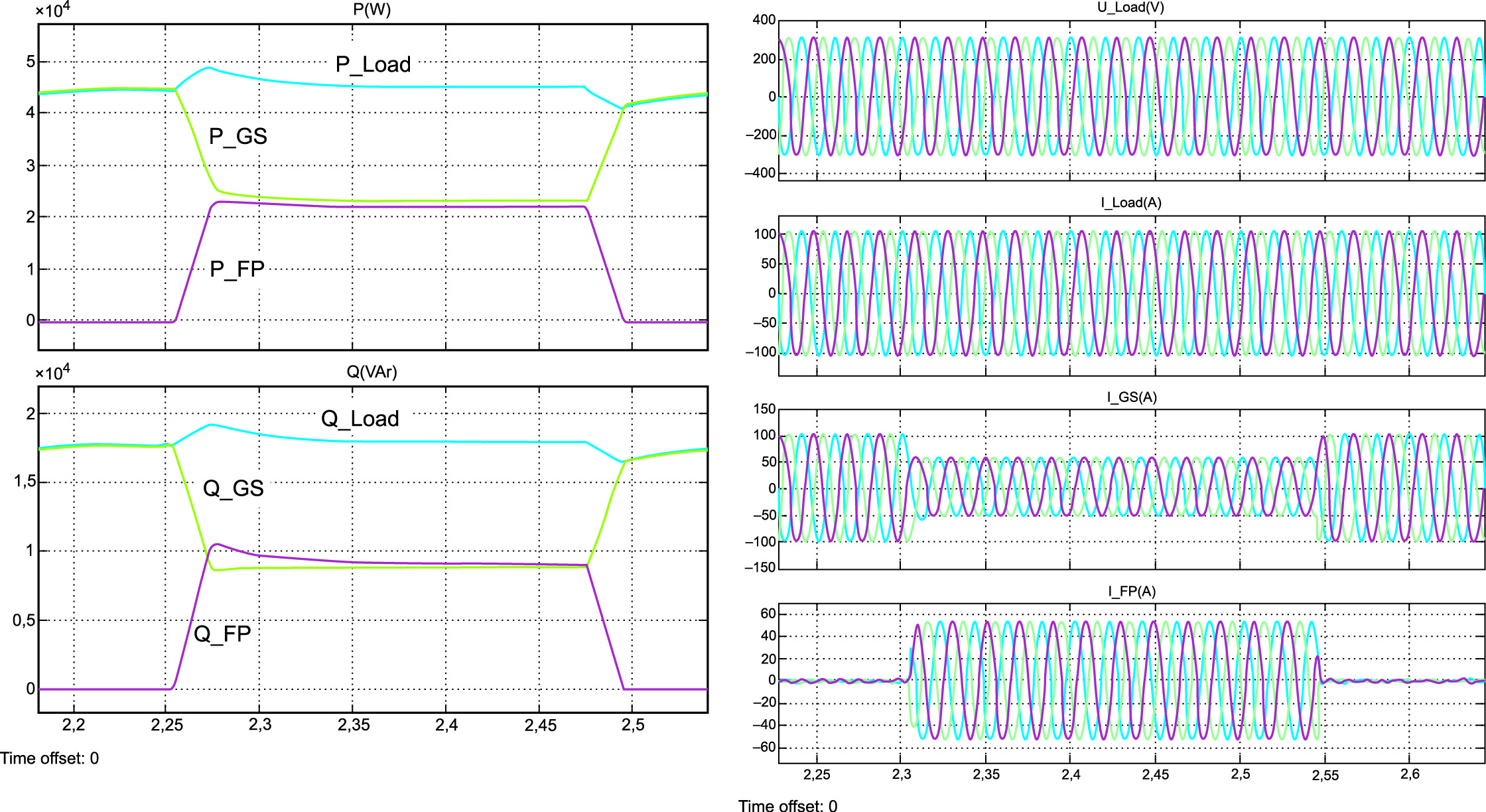
Рис. 6. Энергетические и электромагнитные процессы в системе при переключении с разделением нагрузки поровну между генераторами
На рис. 7 представлен случай, когда валогенератор в подсистеме МССМГАВ подключается и отключается на полную активную мощность нагрузки. В этом случае при подключении валогенератора он принимает на себя всю активную мощность, а всю реактивную мощность в нагрузке обеспечивает СГ. При подключении валогенератора в системе наблюдаются нелинейные переходные процессы, физика которых подлежит выяснению.

Рис. 7. Энергетические и электромагнитные процессы в системе при переключении полной активной нагрузки между генераторами
На рис. 8 проиллюстрирован случай, когда валогенератор в подсистеме МССМГАВ подключается и отключается на полную мощность нагрузки. В этом случае активная и реактивная мощности переключаются между генераторами, и полная мощность нагрузки обеспечивается СМГ валогенератора.
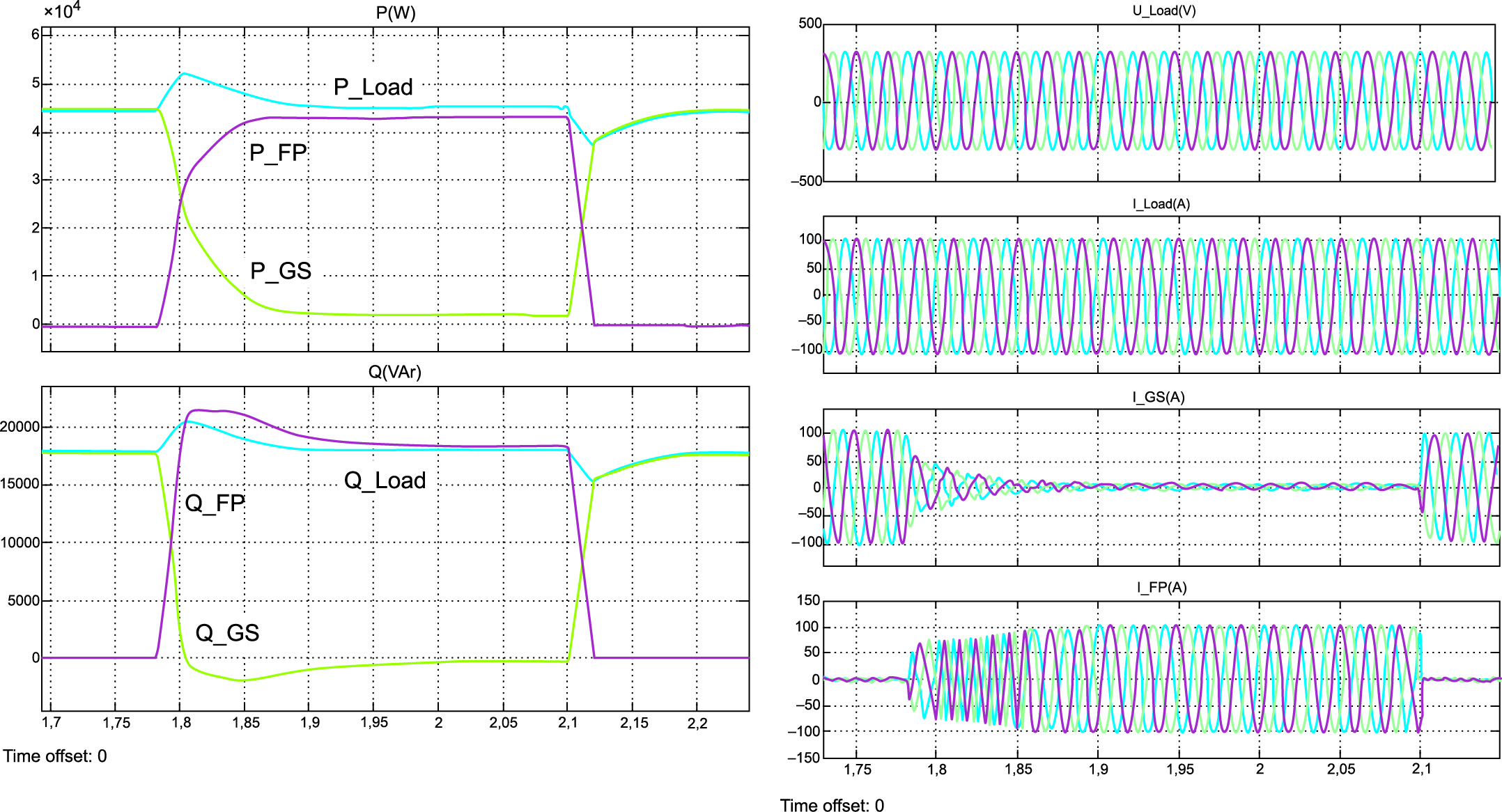
Рис. 8. Энергетические и электромагнитные процессы в системе при переключении полной нагрузки между генераторами
Таким образом, моделирование подтверждает способность рассматриваемой системы разделять активную и реактивную мощность в нагрузке пропорционально заданным сигналам управления инвертором. При этом перераспределение мощностей осуществляется без возникновения колебательных процессов обмена активными и реактивными мощностями между генераторами помимо нагрузки.
Заключение
Специфика применения судовых генераторов часто требует их параллельной работы. Это условие вызвано не только потребляемой мощностью нагрузки, но прежде всего, обеспечением безопасности судна, особенно в трудных условиях плавания или маневрах. Одним из способов решения этой проблемы является асимметричная параллельная работа генераторов, реализованная таким образом, чтобы один генератор был нагружен на 70–80%, а другой на 30–20% от всей мощности нагрузки. В этом случае большая мощность обеспечивается валогенератором, а меньшая — дизель-генератором.
Разработанная модель позволяет исследовать любые возможные случаи перераспределения мощностей двух генераторов как в установившихся, так и в переходных режимах работы.
- Бродовский В. Н., Иванов Е. С. Приводы с частотно-токовым управлением. М.: Энергия, 1974.
- Болотин Б. И., Вайнер В. Л. Инженерные методы расчетов устойчивости судовых автоматизированных систем. Л.: Судостроение, 1974.
- Булгаков А. А. Новая теория управляемых выпрямителей. М.: Наука, 1970.
- Бельский А. А., Абрамович Б. Н. Критерий выбора оптимальных параметров ветродизельных комплексов для энергообеспечения потребителей минерально-сырьевого комплекса. XL Неделя науки СПбГПУ: материалы межд. науч.-практ. конф., ч. II. СПб.: изд-во СПбГПУ, 2011.
- Вольдек А. И. Электрические машины. М.: Энергия, 1978.
- Васьков А. Г., Тягунов М. Г. Распределенные системы энергоснабжения на основе гибридных энергокомплексов с установками возобновляемой энергетики // Новое в российской электроэнергетике. 2013. № 4.
- Герман-Галкин С. Г. Matlab — Simulink. Проектирование мехатронных систем. СПб.: Корона-Век, 2008.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Урок 24. Мехатронная система с магнитоэлектрическим генератором и активным полупроводниковым выпрямителем // Силовая электроника. 2018. № 1.
- Елистратов В. В. Возобновляемая энергетика. СПб., Изд-во Политехнического университета, 2016.
- Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. Пер. с нем. М.-Л.: Госэнергоиздат, 1963.
- Константинов В. Н. Синхронизация судовых синхронных генераторов. Теория и методы расчета. Л.: Судостроение, 1978.
- Бердников Р. Н., Бушуев В. В., Васильев С. Н. и др. Концепция интеллектуальной электроэнергетической системы России с активно-адаптивной сетью (ИЭС ААС). М.: ОАО «НТЦ ФСК ЕЭС», 2012.
- Кундас С. П., Шенк Ю., Вайцехович Н. Н. Гибридные технологии в использовании возобновляемых источников энергии // Энергоэффективность. 2012. № 2.
- Лукутин Б. В., Суржикова О. А., Шандарова Е. Б. Возобновляемая энергетика в децентрализованном электроснабжении. М.: Энергоатомиздат, 2008.
- Минин В. А. Оценка экономической эффективности совместной работы дизельных электростанций и ветроэнергетических установок в условиях Севера // Альтернативная энергетика и экология. 2010. № 7.
- Розанов Ю. К. Силовая электроника. М.: Издательский дом МЭИ, 2007.
- Cавенко А. Е., Голубев А. Н. Обменные колебания мощности в судовых электротехнических комплексах. Иваново, 2016.
- Соколовский Г. Г. Электроприводы переменного тока с частотным управлением. М.: Академия, 2006.
- Соснина Е. Н., Шалухо А. В., Липужин И. А. Simulink-модель ветродизельной электростанции с вставкой постоянного тока. Сборник статей Всеросс. науч.-техн. конф. Актуальные проблемы электроэнергетики. Нижний Новгород, 2015.
- Тимченко В. Ф. Колебания нагрузок и обменной мощности энергосистем. М.: Энергия, 1975.
- Токарев Л. Н. Математическое описание, расчет и моделирование физических процессов в судовых электростанциях. Л.: Судостроение, 1980.
- Ясаков Г. С. Корабельные электроэнергетические системы. Часть 1. СПб., Военно-морская академия им. Адмирала Флота Советского Союза Н.Г. Кузнецова, 1999.
 19 сентября, 2007
19 сентября, 2007 28 сентября, 2007
28 сентября, 2007