
ШКОЛА MATLAB. Виртуальные лаборатории устройств силовой электроники и электромеханики в среде Matlab+Simulink. Урок. 35. Гибридная мехатронная система электромобиля
Введение
Мехатронные системы автономных объектов повсеместно выполняют функцию управляемых преобразователей мощности — электрической в механическую в системах электропривода, механической в электрическую в генераторных установках, а также двойного преобразования в разнообразных испытательных стендах и гибридных системах энергообеспечения.
Такие мехатронные системы содержат электрические машины, устройства силовой электроники и микропроцессорные системы управления распределением энергии, управления этой энергией и диагностики работы всей системы [3, 4, 14, 15].
Примерами таких систем, в частности, являются мехатронные системы в автономном электротранспорте. Универсальное решение для обеспечения всех условий работы и улучшения энергетических характеристик транспортных систем реализуется применением активных полупроводниковых преобразователей (АПП) [17]. В статье рассматриваются и исследуются способы управления АПП, позволяющие оптимизировать энергетические характеристики гибридной мехатронной системы электромобиля.
Функциональная схема гибридной мехатронной системы электромобиля
Гибридная мехатронная система электромобиля (ГМСЭ) содержит три источника мощности (рис. 1) (в статье все блоки системы представлены в англоязычной транскрипции для корреляции их названий с моделями, разработанными в среде Matlab-Simulink. Эта среда, как известно, не воспринимает кириллицу).

Рис. 1. Функциональная схема ГМСЭ
Первый источник включает двигатель внутреннего сгорания (СE — Сombustion Engine), синхронный генератор с постоянными редкоземельными магнитами на роторе (PSMG — Permanent Magnet Sunchronous Generator), активный выпрямитель (AR — Аctive Rectifier) с системой управления (CSAR — Сontrol System Active Rectifier) и дополнительные нелинейные блоки управления (BNd, BNq), позволяющие оптимизировать энергетические характеристики системы.
Вторым источником служит аккумулятор с суперконденсатором (Udc).
Третьим источником является электрический двигатель (PMSM — Permanent Magnet Sunchronous Machine) с активным преобразователем (AC — Active Convertor), включенный в замкнутую систему электропривода с нелинейными блоками (BNd, BNq) и ПИ-регулятором скорости (PI).
Алгебраическое сложение мощностей от этих источников осуществляется в цепи постоянного тока, при этом аккумулятор с суперконденсатором исполняет роль источника напряжения (Master mode) и основного энергетического буфера, а активные преобразователи со своими электрическими машинами исполняют функции источников тока (Slave mode). Такая функциональная роль рассматриваемых источников мощности позволяет создать систему, удовлетворяющую требованиям к автономному электрическому транспорту.
Активная мощность в системе CE-PMSG-AR (рис. 1) передается только в одну сторону, поскольку двигатель внутреннего сгорания, вращающий синхронный генератор, является однонаправленным источником мощности. Аккумулятор и активный преобразователь в электроприводе — это источники с двусторонней энергетической связью, которые обеспечивают передачу активной мощности в двух направлениях. Поэтому при разгоне автомобиля (например, когда он трогается с места на перекрестке) для уменьшения загрязнения атмосферы города двигатель внутреннего сгорания остается выключенным. Вся мощность, необходимая для разгона электромобиля, потребляется от аккумулятора и передается к электрическому двигателю, связанному с ведущими колесами. При достижении электромобилем определенной скорости запускается двигатель внутреннего сгорания, соединенный с генератором, и мощность от генератора поступает как в аккумулятор, заряжая его, так и через активный преобразователь в электрический двигатель автомобиля. При торможении автомобиля его кинетическая энергия рекуперируется в аккумулятор посредством активного преобразователя АС (рис. 1).
Системы управления активным выпрямителем (CSAR) в генераторной установке и активным преобразователем (CSAC) в электроприводе содержат гистерезисные регуляторы тока с датчиками фазных токов (CS — current sensor), датчики положения ротора (RPS — Rotor Position Sensor) и преобразователи вращающихся координат (d, q) в неподвижные (a, b, c) [9, 18]. Такая структура управления образует замкнутую систему, обеспечивающую токовое управление синхронными магнитоэлектрическими машинами [2, 10, 12].
Электрическая эквивалентная схема замещения гибридной мехатронной системы электромобиля
Схема замещения, предназначенная для осуществления анализа ГМСЭ, приведена на рис. 2, где обозначены:
- wmg — скорость вращения вала синхронного генератора;
 — ЭДС синхронного генератора;
— ЭДС синхронного генератора; — ток якоря синхронного генератора;
— ток якоря синхронного генератора; — напряжение на стороне переменного тока АR;
— напряжение на стороне переменного тока АR;- rg, xg — активное и реактивное сопротивление якоря синхронного генератора;
- PGS — активная мощность в системе PMSG-AR;
- QGS — реактивная мощность в системе PMSG-AR;
- DAR — дроссель в цепи постоянного тока активного выпрямителя;
 — ток в цепи постоянного тока активного выпрямителя;
— ток в цепи постоянного тока активного выпрямителя;- ωm — скорость вращения вала синхронного электрического двигателя;
 — ЭДС синхронного электрического двигателя (PMSM);
— ЭДС синхронного электрического двигателя (PMSM); — ток якоря синхронного электрического двигателя (PMSM);
— ток якоря синхронного электрического двигателя (PMSM); — напряжение на стороне переменного тока АС;
— напряжение на стороне переменного тока АС;- rm, xm — активное и реактивное сопротивление якоря синхронного электрического двигателя;
- PEM — активная обменная мощность между цепью постоянного и переменного тока системы AC-PMSM ГМСЭ;
- QEM — реактивная мощность в системе PMSM-AC;
- DAC — дроссель в цепи постоянного тока активного преобразователя;
- — ток в цепи постоянного тока активного преобразователя;
- Pdc — активная обменная мощность в аккумуляторе.
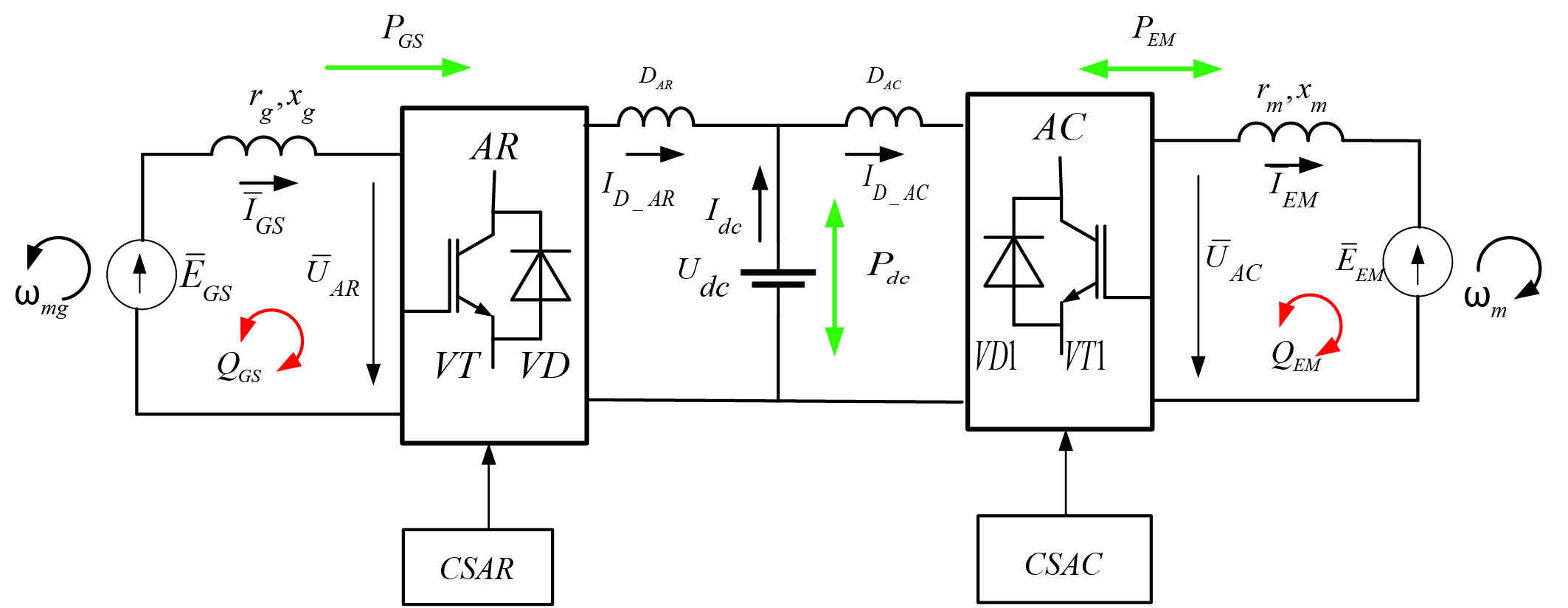
Рис. 2. Схема замещения ГМСЭ
В общей цепи постоянного тока имеет место передача только активной мощности Pdc. В контурах переменного тока — передача активной мощности PGS, PEM и циркуляция реактивных мощностей QGS, QEM. Активные мощности жестко связаны между собой, а реактивные мощности зависят от способа управления активными преобразователями АR и АС. Реактивные мощности никак не связаны между собой и могут управляться независимо друг от друга.
Аналитическое и модельное исследование энергетических характеристик ГМСЭ осуществляются, как и ранее, на базе анализа электромагнитных процессов в квазиустановившихся режимах.
Математическое описание и исследование гибридной мехатронной системы электромобиля
Исследования, помещенные ниже, осуществлены для ГМСЭ, параметры машин в которой одинаковые:
- номинальный момент в длительном режиме работы: 126 Нм;
- номинальная скорость вращения: 300 рад/с;
- сопротивление обмотки якоря: 0,05 Ом;
- индуктивность обмотки якоря: 0,000635 Гн;
- постоянная по ЭДС: 0,192 Вс/рад;
- число пар полюсов: 4.
Электромагнитные процессы в системе исследуются c использованием эквивалентной схемы замещения (рис. 2) с учетом теоретических положений, разработанных в классических трудах отечественных и зарубежных исследователей [1, 2, 9, 10, 12, 13] и неоднократно описанных в предыдущих уроках.
Математическое описание генераторной установки гибридной мехатронной системы электромобиля
В рассматриваемой эквивалентной схеме замещения активный выпрямитель на стороне переменного тока представлен источником напряжения ![]() , который подключен параллельно статорным обмоткам генератора с ЭДС (
, который подключен параллельно статорным обмоткам генератора с ЭДС (![]() ).
).
Математическое описание генераторной установки PMSG-AR ГМСЭ осуществляется в синхронно вращающейся с ротором генератора системе координат с использованием метода обобщенного (результирующего) вектора [12] и метода основной составляющей [1]. Это математическое описание имеет вид:

где ![]() — пространственный (результирующий) вектор ЭДС на статорных обмотках генератора; ω = pωmg — угловая частота напряжения АR, p — число пар полюсов.
— пространственный (результирующий) вектор ЭДС на статорных обмотках генератора; ω = pωmg — угловая частота напряжения АR, p — число пар полюсов.
Напомним, что запись ![]() в уравнении (1) подчеркивает то обстоятельство, что эти величины являются постоянными с изменяющимися во времени максимальными значениями. Изменения максимальных значений токов, напряжения и ЭДС наблюдаются во время переходных процессов [5].
в уравнении (1) подчеркивает то обстоятельство, что эти величины являются постоянными с изменяющимися во времени максимальными значениями. Изменения максимальных значений токов, напряжения и ЭДС наблюдаются во время переходных процессов [5].
В матописании системы PMSG_AR (2) электромагнитные переменные состояния являются величинами векторными, что вызывает необходимость для исследования энергетических свойств системы PMSG-AR использовать векторные диаграммы. При построении векторной диаграммы по уравнению (2) следует учитывать, что управление активным выпрямителем осуществляется от датчика положения ротора (RPS рис.1). Поэтому электромагнитные процессы в генераторе жестко связаны с вращающимися координатами (d, q), которые, в свою очередь, определяются конструкцией генератора [7]. При этом вектор потокосцепления ![]() совмещается с нулевым состоянием RPS и направляется по вещественной продольной оси (d), вращающейся со скоростью w системы координат. В этом случае ЭДС вращения
совмещается с нулевым состоянием RPS и направляется по вещественной продольной оси (d), вращающейся со скоростью w системы координат. В этом случае ЭДС вращения ![]() опережает потокосцепление на 90° эл. и будет направлена по мнимой (поперечной) оси q. Электромагнитные же процессы в цепи переменного тока AR, связанные с напряжением и током активного выпрямителя, рассматриваются во вращающейся системе координат x, y, которые в общем случае не совпадают с осями d, q.
опережает потокосцепление на 90° эл. и будет направлена по мнимой (поперечной) оси q. Электромагнитные же процессы в цепи переменного тока AR, связанные с напряжением и током активного выпрямителя, рассматриваются во вращающейся системе координат x, y, которые в общем случае не совпадают с осями d, q.
Во вращающейся системе координат d (вещественная ось) и q (мнимая ось) при совмещении вещественной оси с вектором потокосцепления возбуждения машины ![]() уравнение (1) в осях d, q принимает вид:
уравнение (1) в осях d, q принимает вид:

В установившемся режиме векторная система уравнений (1) преобразуется к виду:

Скалярная система уравнений (2) в установившемся режиме запишется в виде:

Векторные диаграммы, построенные по уравнению (3), представлены на рис. 3а, б для двух способов управления активным выпрямителем. При первом способе управление активным выпрямителем осуществляется только по одной (поперечной) оси q. Этот способ управления в литературе по аналогии с асинхронными системами управления часто именуют управлением с ориентацией по магнитному потоку (FOC — Field Oriented Control). Векторная диаграмма для данного способа управления приведена на рис. 3а. При другом способе, который подробно описан и проанализирован в [7], сигналы управления задаются так, чтобы в цепи переменного тока активного выпрямителя отсутствовал реактивный ток. Этот способ назван оптимальным, а векторная диаграмма, соответствующая оптимальному способу управления, представлена на рис. 3б.

Рис. 3. Векторные диаграммы генераторной установки ГМСЭ при различных способах управления в системе PMSG-AR
Электромагнитные и энергетические характеристики генераторной установки при токовом FOC-управлении
При FOC-управлении током AR, когда I*d= 0, I*q = I*GS, электромагнитные и энергетические характеристики генераторной установки ГМСЭ рассчитываются из уравнений (4):

Уравнения (5) при заданной скорости вращения генератора (ωmg), известных параметрах генератора (rg, xg) разрешимы и позволяют рассчитать энергетические характеристики системы PMSG-AR при задании тока и скорости.

Рис. 4. Энергетические характеристики генераторной установки ГМСЭ при FOC-управлении в системе PMSG-AR
Рассчитанные и построенные энергетические характеристики системы в пространственных координатах при FOC-управлении представлены на рис. 4, из которых следует:
- активная и реактивная мощности в генераторной установке ГМСЭ при токовом FOC-управлении растут приблизительно пропорционально увеличению тока и скорости вращения вала генератора;
- реактивная мощность в генераторной установке ГМСЭ при FOC-управлении отрицательна (емкостная) и имеет соизмеримое с активной мощностью значение.
Электромагнитные и энергетические характеристики генераторной установки при оптимальном токовом управлении
Если в активном выпрямителе используется токовое управление, то в системе PMSG-AR, управляя по координате q и d, можно поддерживать нулевую реактивную мощность при изменении скорости и тока задания.
Такой режим работы генераторной установки назван оптимальным. Векторная диаграмма для оптимального режима работы приведена на рис. 3б. Энергетические характеристики генераторной установки ГМСЭ при оптимальном токовом управлении рассчитываются с использованием геометрических соотношений векторной диаграммы:

Из второго уравнения системы уравнений (6) следует, что для обеспечения оптимального режима генераторной установки ГМСЭ токи управления по осям d и q нелинейно зависят от тока задания, что обеспечивается нелинейными блоками BNd, BNq (рис. 1).
Рассчитанные и построенные энергетические характеристики системы в пространственных координатах при оптимальном управлении представлены на рис. 5, из которых следует:
- При оптимальном токовом управлении генераторной установкой ГМСЭ активная электромагнитная мощность растет с увеличением скорости. При увеличении тока активная мощность вначале растет, а затем уменьшается. Отмеченная особенность позволяет выбрать оптимальную скорость вращения самого генератора. Такой режим работы в английской версии называется maximum power point tracking — MPPT. Для машины с параметрами, приведенными выше, этот режим показан на рис. 5, он соответствует скорости 300 (1/с) и току 203 (А).
- Электрическая реактивная мощность в системе с оптимальным токовым управлением равна нулю при любых скоростях и токах.
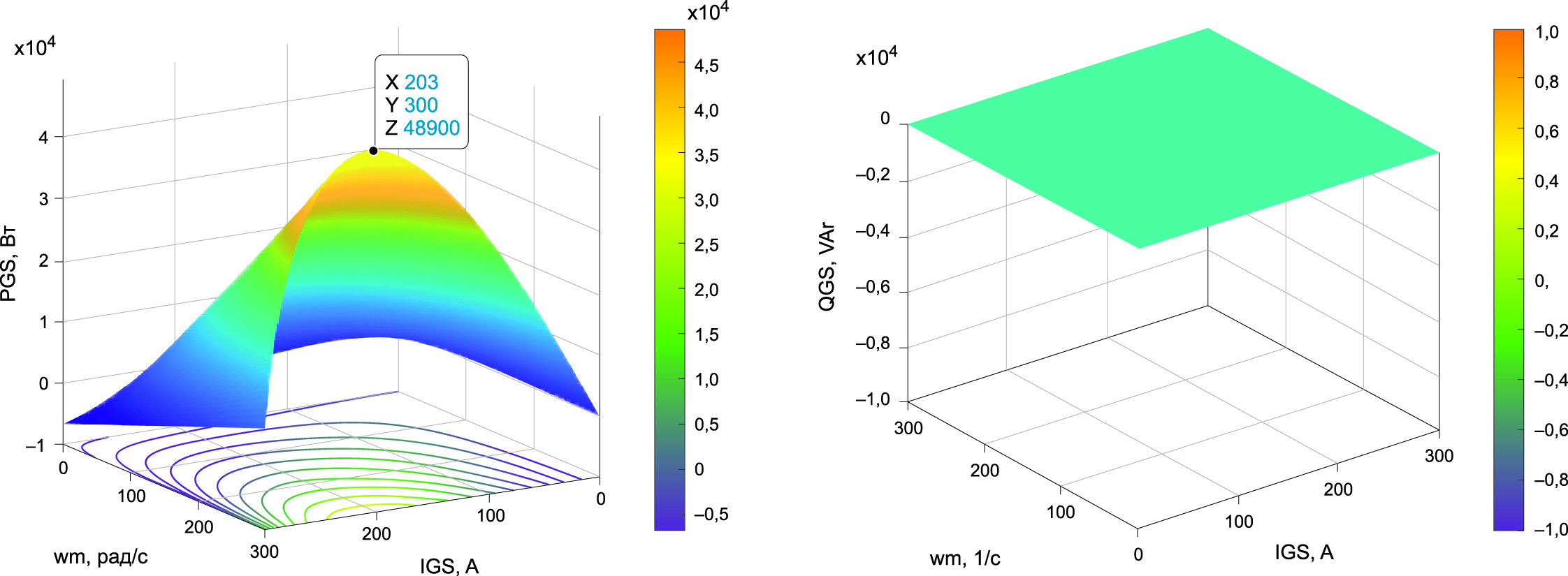
Рис. 5. Энергетические характеристики генераторной установки ГМСЭ при оптимальном управлении в системе PMSG-AR
Математическое описание электропривода гибридной мехатронной системы электромобиля
Во вращающейся системе координат электромагнитные процессы в электроприводе ГМСЭ описываются уравнением:

В системе координат d (вещественная ось) и q (мнимая ось) при совмещении вещественной оси с вектором потокосцепления возбуждения PMSM ![]() уравнение (7) преобразуется к системе скалярных уравнений:
уравнение (7) преобразуется к системе скалярных уравнений:

Уравнения (9), (10) электромагнитных процессов в установившемся режиме работы находятся из (7), (8) и записываются в виде:

Векторные диаграммы, построенные по уравнению (9), представлены на рис. 6 для FOC- и оптимального способов управления активным преобразователем. Так же, как и в генераторной установке, в электроприводе при первом способе управление осуществляется только по одной поперечной оси q. Векторная диаграмма для данного способа управления приведена на рис. 6а. При другом, оптимальном способе управления векторная диаграмма представлена на рис. 6б.

Рис. 6. Векторные диаграммы электропривода ГМСЭ при различных способах управления в системе PMSM-AC:
а) для FOC-управления;
б) для оптимального способа управления
Электромагнитные и энергетические характеристики электропривода ГМСЭ при FOC управлении
Энергетические характеристики электропривода ГМСЭ с FOC- управлением в системе PMSM-AC рассчитываются с использованием уравнений (10) при заданном токе управления двигателем электропривода I*d = 0, I*q = I*EM:

Рассчитанные и построенные энергетические характеристики системы в пространственных координатах при FOC-управлении представлены на рис. 7, из которых следует:

Рис. 7. Энергетические характеристики электропривода ГМСЭ при FOC-управлении в системе PMSM-AC
- активная мощность в электроприводе ГМСЭ при FOC-управлении растет пропорционально увеличению тока управления и скорости вращения вала генератора;
- реактивная мощность в электроприводе ГМСЭ при FOC-управлении растет пропорционально скорости вращения вала генератора и приблизительно параболически току;
- реактивная мощность в электроприводе ГМСЭ при FOC-управлении имеет соизмеримое с активной мощностью значение.
Электромагнитные и энергетические характеристики электропривода ГМСЭ при оптимальном управлении
Векторная диаграмма для оптимального режима работы электропривода приведена на рис. 6б. Из геометрических соотношений векторной диаграммы можно определить продольную и поперечную составляющие токов, при которых реактивная мощность в системе PMSM-AС поддерживается равной нулю. Расчет энергетических характеристик электропривода при оптимальном управлении осуществляется по уравнениям, полученным из геометрических соотношений векторной диаграммы.

Рассчитанные по уравнениям (12) и построенные энергетические характеристики электропривода в пространственных координатах при оптимальном управлении представлены на рис. 8, из которых следует:

Рис. 8. Энергетические характеристики электропривода ГМСЭ при оптимальном управлении в системе PMSM-AC
- При оптимальном управлении электропривода ГМСЭ активная электромагнитная мощность растет с увеличением скорости. При увеличении тока активная мощность вначале растет, а затем уменьшается. Такая характеристика в замкнутом электроприводе приводит к возникновению нелинейных автоколебаний при токе (моменте), соответствующем подающему участку характеристики. Это требует в системе управления электроприводом вводить ограничение на входе релейного регулятора тока.
- Реактивная мощность в системе с оптимальным управлением равна нулю при любых скоростях и токах.
Модельное исследование гибридной мехатронной системы электромобиля
Модельные исследования ГМСЭ проводились для генераторной установки и электропривода электромобиля с FOC-управлением и с оптимальным управлением.

Рис. 9. Виртуальная модель гибридной мехатронной системы электромобиля (ГМСЭ)
Модель ГМСЭ (рис. 9) содержит:
- электропривод, включающий систему управления (Control System Active Сonvertor) и силовую часть, включающую Active Convertor, Current Sensor Machine, Voltage Sensor Machine, Electrical Machine;
- генераторную установку (Generator set), содержащую (рис. 10) систему управления (Control System Active Rectifier) и силовую часть (PMSG-AR);
- систему измерения (Measurement) электромагнитных и энергетических процессов.

Рис. 10. Виртуальная модель генераторной установки ГМСЭ
Эта модель позволяет исследовать квазиустановившиеся и квазидинамические электромагнитные и энергетические процессы в ГМСЭ.
Ток и скорость генераторной установки ГМСЭ формируются блоком (Control Blok, рис. 9). Ток электропривода ГМСЭ формируется на выходе ПИ-регулятора, сигналом задания которого является заданная скорость.
Блоки Hist_Control являются релейными регуляторами, реализующими токовое управление в системах PMSG-AR и PMSM-AC.
Электромагнитные и энергетические процессы в гибридной мехатронной системе электромобиля определялись при моделировании в следующих режимах работы:
- При пуске электропривода с ограничением тока (момента), когда электромобиль трогается с места, а генераторная установка не работает.
- При постоянной скорости электромобиля и пуске двигателя внутреннего сгорания на постоянной скорости.
- При постоянной скорости электромобиля и работающем двигателе внутреннего сгорания на постоянной скорости.
- При торможении электромобиля с последующим движением на пониженной скорости.
Переключение между перечисленными режимами осуществляются скачкообразно, что позволяет наблюдать переходные процессы в ГМСЭ. Моделирование в ГМСЭ осуществлялось в системе с FOC-управлением и оптимальным управлением как в генераторной установке, так и в электроприводе.
Электромагнитные и энергетические процессы ГМСЭ (рис. 11–14) представлены следующими осциллограммами:
- моментом и скоростью двигателя электропривода
 ;
; - моментом и скоростью генератора
 ;
; - активной и реактивной мощностью генераторной установки
 ;
; - активной и реактивной мощностью электропривода
 ;
; - мощностью в аккумуляторе (Pdc(W)), мощностью в цепи постоянного тока электропривода ((Pd_EM(W))), мощностью в цепи постоянного тока генератора ((Pd_GS(W)));
- фазными токами двигателя электропривода (I_EM(A));
- фазными токами генератора (I_GS(A)).
Момент на валу двигателя электропривода задается пропорциональным скорости вращения (пропорционально скорости движения электромобиля).
Независимой переменной на осциллограммах является относительное время t(pu) = ωbt, ωb = 314 (рад/c).
На рис. 11 приведены перечисленные осциллограммы для FOC-управления как в электроприводе, так и в генераторной установке.

Рис. 11. Электромагнитные и энергетические процессы в ГМСЭ с FOC-управлением в генераторной установке и электроприводе (QGS = const, QEM = const)
В первом режиме работы при t(pu) = 0–0,02 pu мощность электропривода покрывается мощностью (током), потребляемой только от аккумулятора (рис. 11б).
При втором и четвертом режимах работы генератор снабжает энергией как электропривод, так и аккумулятор.
При торможении (t(pu)= 0,04–0,06 pu) в третьем режиме работы генератор и электропривод снабжают энергией аккумулятор.
Активные и реактивные мощности при этом способе управления в обеих установках соизмеримы.
На рис. 12 представлены электромагнитные и энергетические процессы в ГМСЭ при оптимальном управлении как генераторной установкой, так и электроприводом. Сравнивая рис. 11а и рис. 12а, можно убедиться, что реактивные мощности при этом способе управления в обеих установках равны нулю.

Рис. 12. Электромагнитные и энергетические процессы в ГМСЭ с оптималным управлением в генераторной и электроприводной подсистемах (QEM = 0, QGS = 0)
На рис.13, 14 приведены результаты моделирования ГМСЭ для промежуточных способов управления генераторной установкой и электроприводом. Общий вывод этих исследований сводится к тому, что для ГМСЭ с выбранными параметрами электрических машин существенное улучшение энергетических характеристик достигается при оптимизации генераторной установки как за счет выбора оптимальной скорости вращения, так и за счет оптимального управления. В электроприводной части ГМСЭ существенным является исключение нелинейных автоколебаний, что обеспечивается выбором величины ограничения тока в системе управления.

Рис. 13. Электромагнитные и энергетические процессы в ГМСЭ с FOC-управлением в генераторной подсистеме и с оптимальным управлением в электроприводной подсистеме (QEM = 0, QGS = const)

Рис. 14. Электромагнитные и энергетические процессы в ГМСЭ с FOC-управлением в электроприводной подсистеме и с оптимальным управлением в генераторной подсистеме (QEM = const, QGS = 0)
На рис. 15 в качестве примера приведены электромагнитные и энергетические процессы в ГМСЭ с оптимальным управлением в генераторной установке и электроприводе (QEM = 0, QGS = 0) при отсутствии ограничения на входе регулятора тока электропривода. Благодаря наличию аккумулятора нелинейные автоколебательные электромагнитные процессы наблюдаются в основном в электроприводе, существенно ухудшая его энергетические характеристики. При этом в скорости электропривода и в генераторной установке такие автоколебания практически незаметны.

Рис. 15. Электромагнитные и энергетические процессы в ГМСЭ с оптимальным управлением (QEM = 0, QGS = 0) при отсутствии ограничения в электроприводе
Заключение
Силовые полупроводниковые преобразователи в интеллектуальных системах и сетях (Smart Grid) позволяют построить отдельные источники тока (slave mode) и соединить их параллельно с одним источником напряжения (master mode), исключив при этом обменные колебательные процессы между этими источниками. В рассмотренной гибридной мехатронной системе электромобиля роль источника напряжения выполняет аккумулятор. Электропривод, на входе которого используется регулятор скорости, и генераторная установка выполняют роли регулируемых источников тока с односторонней для генератора и двусторонней для электропривода энергетической связью. Разработанная и представленная в статье виртуальная модель позволяет исследовать любые возможные случаи перераспределения мощностей всех трех источников как в установившихся, так и в переходных режимах работы. Для ГМСЭ с выбранными параметрами электрических машин существенное улучшение энергетических характеристик достигается при оптимизации генераторной установки как за счет выбора оптимальной скорости вращения генератора, так и за счет оптимального управления активным преобразователем. В электроприводной части ГМСЭ существенным является исключение нелинейных автоколебаний, что обеспечивается выбором величины ограничения тока в системе управления.
- Булгаков А. А. Новая теория управляемых выпрямителей. М.: Наука, 1970.
- Бродовский В. Н., Иванов Е. С. Приводы с частотно-токовым управлением. М.: Энергия, 1974.
- Богданов К. Л. Тяговый электропривод автомобиля. М.: МАДИ, 2009.
- Васьков А. Г., Тягунов М. Г. Распределенные системы энергоснабжения на основе гибридных энергокомплексов с установками возобновляемой энергетики // Новое в российской электроэнергетике. 2013. № 4.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Виртуальные лаборатории устройств силовой электроники и электромеханики в среде Matlab+Simulink. Урок 24. Мехатронная система с магнитоэлектрическим генератором и активным полупроводниковым выпрямителем // Силовая электроника. 2018. № 1.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Виртуальные лаборатории устройств силовой электроники и электромеханики в среде Matlab+Simulink. Урок 26. Оптимизация энергетических свойств мехатронной системы с вентильной электрической машиной // Силовая электроника. 2018. № 3.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Виртуальные лаборатории устройств силовой электроники и электромеханики в среде Matlab+Simulink. Урок 28. Синтез оптимального управления генераторной установкой с вентильной электрической машиной // Силовая электроника. 2019. № 1.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Виртуальные лаборатории устройств силовой электроники и электромеханики в среде Matlab-Simulink. Урок. 34. Гибридная генераторная установка постоянного тока с синхронными магнитоэлектрическими машинами // Силовая электроника. 2020. № 6.
- Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. Пер. с нем. М.-Л.: Госэнергоиздат, 1963.
- Овчинников И. Е. Вентильные электрические двигатели и привод на их основе (малая и средняя мощность). Курс лекций. СПб., КОРОНА — Век, 2006.
- Cавенко А. Е., Голубев А. Н. Обменные колебания мощности в судовых электротехнических комплексах. Иваново, 2016.
- Слежановский О. В., Дацковский Л. Х., Кузнецов И. С., Лебедев Е. Д., Тарасенко Л. М. Системы подчиненного регулирования электропривода переменного тока с вентильными преобразователями. Энергоатомиздат 1983.
- Соколовский Г. Г. Электроприводы переменного тока с частотным управлением. М.: Академия, 2006.
- Соснина Е. Н., Шалухо А. В., Липужин И. А. Simulink-модель ветродизельной электростанции с вставкой постоянного тока. Сб. статей. Всеросс. науч.-техн. конф. «Актуальные проблемы электроэнергетики». Нижний Новгород, 2015.
- Тимченко В. Ф. Колебания нагрузок и обменной мощности энергосистем. М.: Энергия, 1975.
- Ясаков Г. С. Корабельные электроэнергетические системы. Часть 1. СПб., Военно-морская академия им. Адмирала Флота Советского Союза Н. Г. Кузнецова, 1999.
- German-Galkin S., Tarnapowicz D.. ENERGY OPTIMIZATION OF MECHATRONIC SYSTEMS WITH PMSG. 3rd International Conference on Energy and Environmental Protection. Krakow, Poland, September 13–14, 2018.
- Park R. H. Two-reaction theory of synchronous machines: Generalized method of analysis — part 1. of AIEE. July, 1929.
 5 сентября, 2011
5 сентября, 2011 24 июля, 2009
24 июля, 2009 1 сентября, 2020
1 сентября, 2020