
ШКОЛА MATLAB. Урок. 34. Гибридная генераторная установка постоянного тока с синхронными магнитоэлектрическими машинами
Схема замещения ГГУ
Схема замещения гибридной генераторной установки (ГГУ) приведена на рис. 1 и содержит две генераторные установки, силовые части которых включают синхронные магнитоэлектрические генераторы и активные полупроводниковые выпрямители.

Рис. 1. Схема замещения ГГУ
В этой эквивалентной схеме замещения обозначены:
- АВ1, АВ2 — активные выпрямители первого и второго генератора;
- РН1, РТ1 — регулятор напряжения и тока в системе управления активным выпрямителем первого генератора;
- РТ2 — регулятор тока в системе управления активным выпрямителем второго генератора;
 — результирующие векторы эдс на выходе первого генератора, напряжения на стороне переменного тока АR1 и тока первого генератора;
— результирующие векторы эдс на выходе первого генератора, напряжения на стороне переменного тока АR1 и тока первого генератора;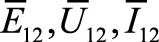 — результирующие векторы эдс на выходе второго генератора, напряжения на стороне переменного тока АR2 и тока второго генератора;
— результирующие векторы эдс на выходе второго генератора, напряжения на стороне переменного тока АR2 и тока второго генератора;- Udc — напряжение в цепи постоянного тока (в нагрузке ГГУ);
- r11, x11 = ω1L11 — активное и реактивное сопротивления первого генератора;
- r12, x12 = ω2L12 — активное и реактивное сопротивления второго генератора;
- R, C — переменная нагрузка и фильтрующий конденсатор в цепи нагрузки (в цепи постоянного тока).
Основное назначение ГГУ — поддерживать постоянное напряжение на выходе Udc = const при различных скоростях вращения валов генераторов и при изменении нагрузки.
По отношению к нагрузке активные выпрямители выполняют функцию управляемых источников тока, что обеспечивается релейными регуляторами тока (РТ1, РТ2).
В качестве переменных режима в ГГУ с рассматриваемой структурой выступают:
- скорость вращения вала первого генератора ωm1;
- скорость вращения вала второго генератора ωm2;
- ток нагрузки ГГУ, который при постоянном напряжении Udc пропорционален мощности в нагрузке;
- ток задания I*12 на входе регулятора тока АВ2 во втором канале.
Система управления активным выпрямителем в первом канале поддерживает постоянным напряжение нагрузки за счет внешнего (по отношению к контуру регулирования тока) ПИ-регулятора напряжения. При таком построении ГГУ первый канал, являясь источником стабильного напряжения (master mode), автоматически изменяет механическую мощность на валу машины и электрическую мощность в контуре «СММ1-АВ1» при изменении нагрузки.
Изменение скорости вращения вала первого генератора не приводит к изменению механической мощности на его валу и электромагнитной мощности в контуре «СММ1-АВ1».
Второй канал, являясь источником тока (slave mode), изменяет ток (мощность при постоянном Udc = const) в зависимости от входного сигнала и скорости вращения вала второго генератора. При этом автоматически изменяется распределение мощностей в нагрузке между первым и вторым каналом. Таким образом, распределение мощностей по каналам осуществляется за счет изменения сигнала управления и скорости вращения вала во втором канале ГГУ. Все, что сказано выше, относится к активным мощностям в первом и во втором канале. Реактивные же мощности в контурах «СММ-АВ» каждого канала могут управляться независимо. Их перекрестное влияние обусловлено протеканием полного тока в контурах «СММ-АВ». Это влияние незначительно и может быть сведено к нулю специальными схематическими построениями.
Анализ электромагнитных и энергетических процессов в ГГИ осуществляется по основной составляющей [1] с использованием метода результирующего вектора [8, 12] на основании схемы замещения.
Математическое описание системы
В эквивалентной схеме замещения (рис. 1) активные выпрямители (АВ1, АВ2) с одной стороны подключены к статорным обмоткам СММ1 и СММ2 с ЭДС (), с другой — к общей нагрузке постоянного тока, содержащей сопротивление нагрузки с емкостным фильтром. Индуктивные и активные сопротивления в схеме замещения являются внутренними параметрами машины и преобразователя.
Математическое описание каждой системы «машина — активный выпрямитель» на стороне переменного тока во вращающейся синхронно с валом соответствующей машины системе координат в каждом канале может быть представлено в виде:

Значение эдс на выходе СММ1 и СММ2 определяется скоростью вращения их валов wm1, wm2, числом пар полюсов и потокосцеплением возбуждения

где p1, p2 — число пар полюсов в каждой машине; ![]() — потокосцепления возбуждения первого и второго генератора, ω1, ω2 — угловые частоты протекания электромагнитных процессов в системах.
— потокосцепления возбуждения первого и второго генератора, ω1, ω2 — угловые частоты протекания электромагнитных процессов в системах.
При построении векторной диаграммы по уравнениям (1), (2) электромагнитные процессы рассматриваются в системе вращающихся координат (d, q), связанных с конструкцией машины [2], а электромагнитные процессы, связанные с напряжением и током, в активных выпрямителях рассматриваются во вращающейся системе координат x, y. При этом вектор ![]() соответствующего потокосцепления совмещается с нулевым состоянием датчика положения ротора (ДПР) и направляется по вещественной оси (d) вращающейся системы координат. В этом случае соответствующая ЭДС вращения
соответствующего потокосцепления совмещается с нулевым состоянием датчика положения ротора (ДПР) и направляется по вещественной оси (d) вращающейся системы координат. В этом случае соответствующая ЭДС вращения ![]() опережает потокосцепление на 90° эл. и будет направлена по мнимой оси q. Поэтому при построении векторной диаграммы следует, в добавление к сказанному, учитывать то обстоятельство, что направление векторов потокосцепления и ЭДС в координатах d, q определяются начальной установкой ДПР.
опережает потокосцепление на 90° эл. и будет направлена по мнимой оси q. Поэтому при построении векторной диаграммы следует, в добавление к сказанному, учитывать то обстоятельство, что направление векторов потокосцепления и ЭДС в координатах d, q определяются начальной установкой ДПР.
Электромагнитные процессы генераторной установки при различных способах управления активным выпрямителем
Функциональная схема управления активным выпрямителем в каждом канале ГГУ приведена на рис. 2, где обозначены:
- СММ — синхронная магнитоэлектрическая машина;
- ДПР — датчик положения ротора;
- ДТ — датчики фазных токов СММ;
- АВ — активный выпрямитель;
- СУАВ — система управления активным выпрямителем;
- R,C — цепь нагрузки.

Рис. 2. Функциональная схема ГУ при управлении СММ от источника тока
Системы управления активными выпрямителями (СУАВ) содержат гистерезисные регуляторы тока с датчиками фазных токов (ДТ) и преобразователи вращающихся координат (d, q) в неподвижные (a, b, c) [7]. Такая структура управления образует замкнутую систему, обеспечивающую токовое управление синхронной магнитоэлектрической машиной [4, 5, 6]. Дальнейшие исследования, представленные ниже, осуществлены для генераторных установок, параметры машин в которых одинаковые:
- номинальный момент в длительном режиме работы: 111 Н·м;
- номинальная скорость вращения: 75 рад/с;
- сопротивление обмотки якоря: 0,05 Ом;
- индуктивность обмотки якоря: 0,000635 Гн;
- постоянная по ЭДС: 0,192 Вс/рад;
- число пар полюсов: 4.
Наиболее частым и простым способом управления АВ в системе является управление по одной координате Iq* [9]. Это управление благодаря наличию ДПР жестко привязано к магнитному полю ротора машины и по аналогии с асинхронными системами может быть названо управлением с ориентацией по магнитному полю ротора (FOC — Field Oriented Control) [12].
При этом сигнал на второй вход (рис. 2) не подается (Id* = 0). Векторная диаграмма, построенная по уравнению (2), при управлении FOC представлена на рис. 3а. Геометрические соотношения векторной диаграммы позволяют рассчитать электромагнитные и энергетические характеристики каждой генераторной установки.

Рис. 3. Векторные диаграммы в системе при различных способах управления АВ
Во вращающейся системе координат (d — вещественная ось и q — мнимая ось) при совмещении вещественной оси с вектором потокосцепления возбуждения СММ уравнения (2), (3) в осях d, q можно записать в виде:
Напомним, что запись Id(t), Iq(t), E1(t), Udc(t), Idc(t) в уравнениях (5) подчеркивает, что эти величины являются постоянными с изменяющимися во времени максимальными значениями. Изменения максимальных значений токов, напряжения и ЭДС наблюдаются во время переходных процессов.
Уравнения (5) электромагнитных процессов в установившемся режиме работы могут быть записаны в виде:

Энергетические характеристики системы «СММ-АВ» рассчитываются с использованием геометрических соотношений векторной диаграммы (рис. 3а):

Уравнения (6), (7) разрешимы и позволяют рассчитать электромагнитные и энергетические характеристики системы «СММ-АВ» при заданных токах I*di, I*qi. Однако такое управление возможно осуществить только во втором канале (slave mode). В первом канале (master mode), отвечающем за стабилизацию напряжения в нагрузке, значения токов устанавливаются автоматически в зависимости от переменных режима, перечисленных выше.
Электромагнитные и энергетические характеристики генераторной установки при FOC-управлении АВ2
При задании тока управления и скорости во втором канале ГГУ из геометрических соотношений (рис. 3а) для заданных Udc и R рассчитываются электромагнитные и энергетические характеристики в обоих каналах.
Для второго канала ГГУ:

Для первого канала ГГУ:

Зависимости активной и реактивной мощности на выходе генераторов от тока управления во втором канале, рассчитанные по уравнениям (8), (9), представлены на рис. 4.

Рис. 4. Энергетические характеристики в системах «СММ1-АВ1» и «СММ2-АВ2» при FOC-управлении и равных скоростях вращения генераторов
Проекции поверхностей рассчитанных величин на основную плоскость показывают зависимости между током и скоростью в соответствующем канале, при которых мощность остается постоянна. Эти зависимости нелинейны.
Рассмотренная система имеет следующие основные свойства:
- Активная мощность в первом канале (master mode) растет при увеличении скорости и уменьшении тока управления во втором канале.
- Активная мощность во втором канале (slave mode) растет как при увеличении скорости, так и при увеличении тока управления во втором канале.
- Максимальные реактивные (емкостные) мощности в каналах равны приблизительно половине максимальной активной мощности.
- Реактивная мощность в первом канале (master mode) растет при уменьшении скорости и уменьшении тока управления во втором канале, при этом при малых скоростях она практически не зависит от тока управления.
- Реактивная мощность во втором канале (slave mode) растет как при увеличении скорости, так и при увеличении тока управления во втором канале.
- Распределение активных мощностей в системе поддерживается автоматически так, что их сумма составляет мощность в нагрузке.
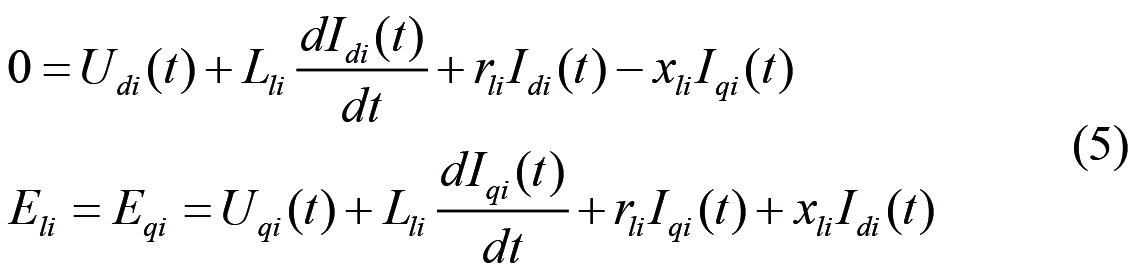
Более наглядную картину распределения мощностей представляют двухмерные зависимости активной и реактивной мощности в каждом канале от тока управления второго канала при одинаковых постоянных скоростях вращения обоих генераторов. Эти зависимости приведены на рис. 5.
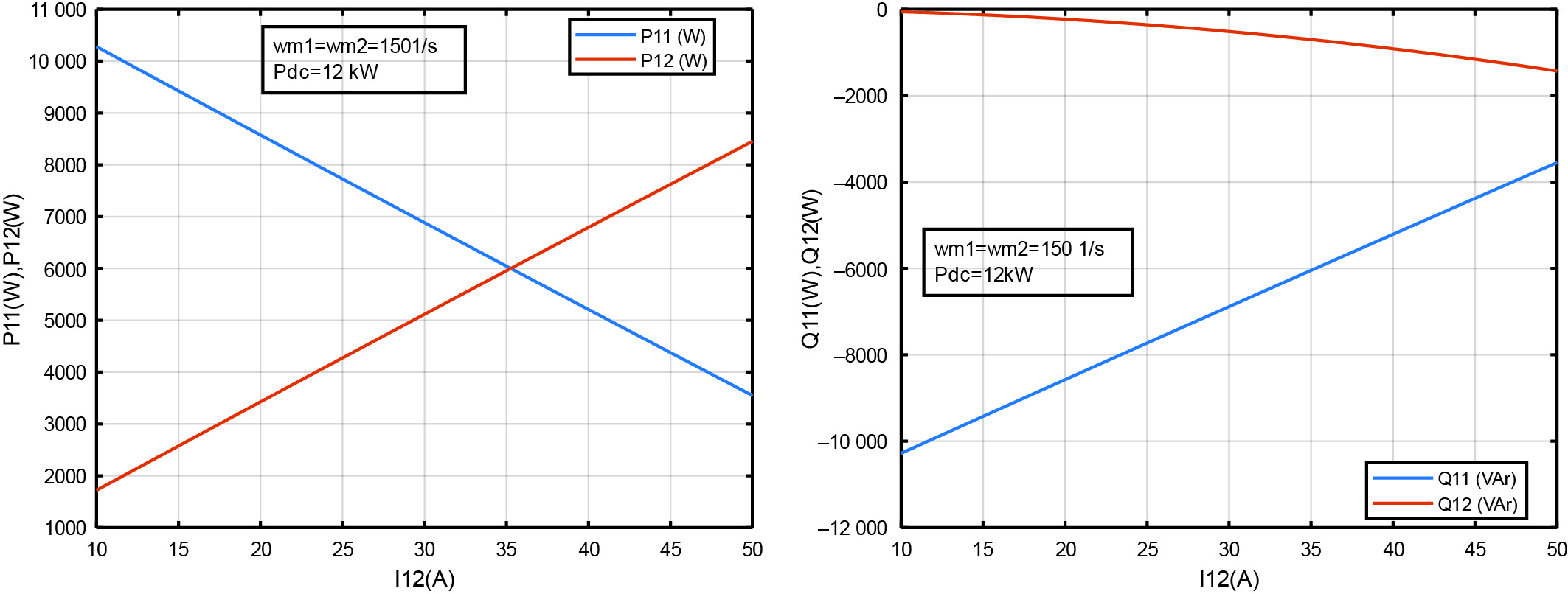
Рис. 5. Энергетические характеристики в системах «СММ1-АВ1» и «СММ2-АВ2» при FOC-управлении и равных скоростях вращения генераторов
При увеличении тока управления во втором канале в нем линейно растет активная электромагнитная мощность. При этом электромагнитная мощность в первом канале уменьшается так, что сумма этих мощностей остается постоянной и равной мощности в нагрузке.
На рис. 6 представлены энергетические характеристики для различных скоростей вращения валов генераторов. Их сравнение с предыдущими (рис. 4) свидетельствует о неизменном характере распределения мощностей в каналах.

Рис. 6. Энергетические характеристики в системах «СММ1-АВ1» и «СММ2-АВ2» при FOC-управлении и разных скоростях вращения генераторов
Электромагнитные и энергетические характеристики генераторной установки при оптимальном управлении в обоих каналах
Если в активном выпрямителе используется токовое управление, то в системе «СММ-АВ», управляя по координате q и d, можно поддерживать нулевую реактивную мощность при изменении скорости и нагрузки [5].
Такой режим работы генераторной установки назван оптимальным. Векторная диаграмма для оптимального режима работы приведена на рис. 3б. Из геометрических соотношений векторной диаграммы можно определить продольную и поперечную составляющие токов, при которых реактивная мощность в системе «СММ-АВ» поддерживается равной нулю. Расчет энергетических характеристик генератора при оптимальном управлении выполняется по уравнениям, полученным из геометрических соотношений векторной диаграммы.
Для второго генератора:

Для первого генератора:

Рассчитанные и построенные энергетические характеристики системы в пространственных координатах при оптимальном управлении представлены на рис. 7, из которых следует:
- При оптимальном управлении АВ1 активная электромагнитная мощность в первом канале зависит только от скорости вращения вала первого генератора. Эта мощность нелинейно растет с увеличением скорости.
- При оптимальном управлении АВ2 активная электромагнитная мощность во втором канале зависит как от скорости вращения второго генератора, так и от тока управления. Она растет как с уменьшением скорости, так и с уменьшением тока управления.
- В системе с оптимальным управлением в обоих каналах реактивные мощности в них равны нулю.

Рис. 7. Энергетические характеристики в системе при оптимальном управлении АВ1 и АВ2 при равных скоростях вращения генераторов
Модельное исследование генераторной установки
Модельные исследования проводились для генераторных установок с FOC-управлением и с оптимальным управлением.
Модель (рис. 8) содержит силовые части систем (PMSG1-AR1; PMSG2-AR2), управляющие части (CSAR1; CSAR2) и измерительную часть (MEASUREMENTS).
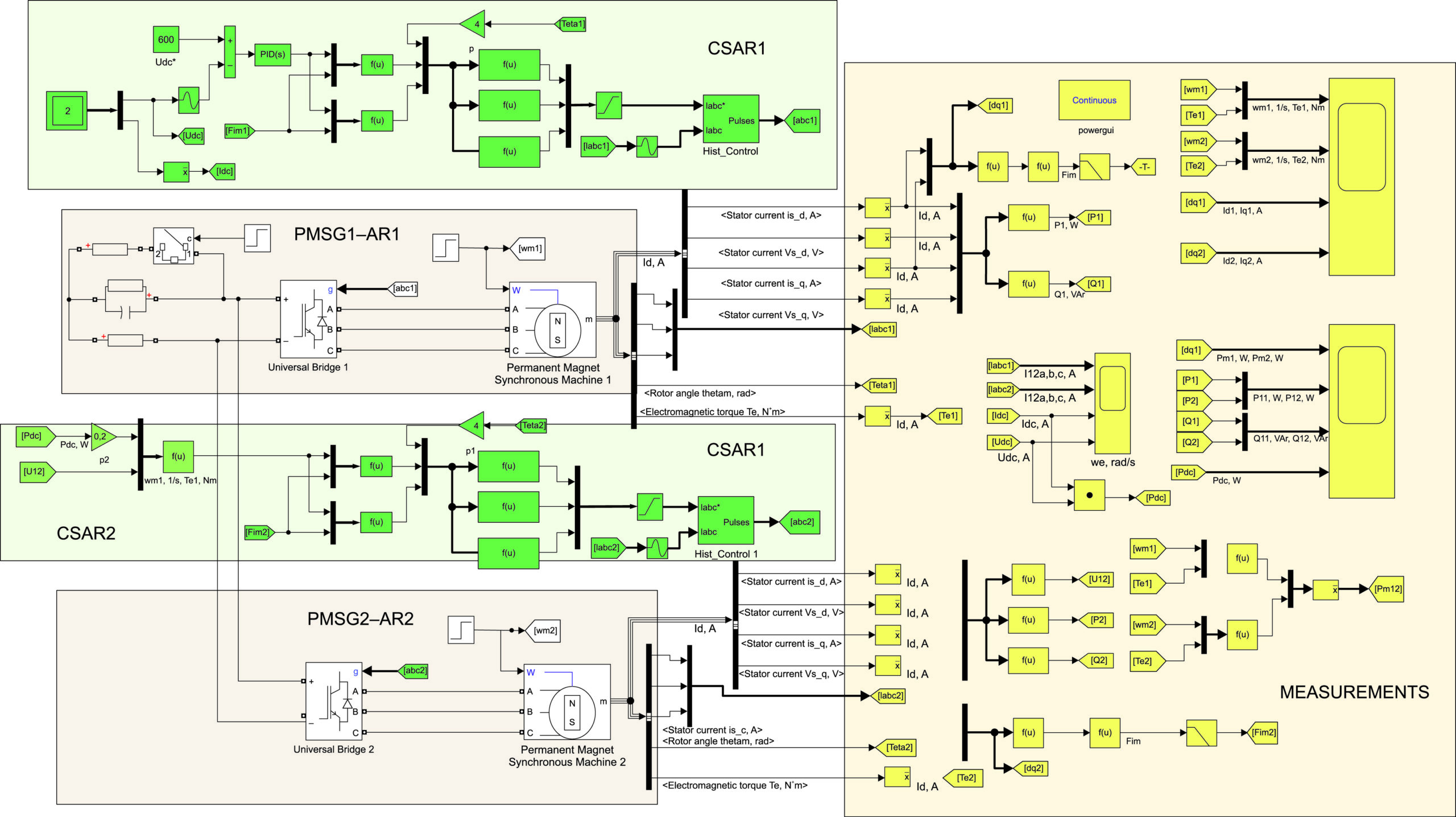
Рис. 8. Виртуальная модель ГГУ
Эта модель позволяет исследовать квазиустановившиеся и квазидинамические электромагнитные и энергетические процессы в генераторной установке с «СММ-АВ».
Заданный ток в СММ1 первого канала формируется на выходе ПИ регулятора, сигналом задания которого является заданное напряжение нагрузки.
Блоки Hist_Control являются релейными регуляторами, реализующими токовое управление в системах «СММ1-АВ1» и «СММ2-АВ2».
Электромагнитные и энергетические процессы в генераторной установке определялись при моделировании в следующих заданных квазиустановившихся режимах работы (переменных состояния):
- При постоянных и равных скоростях в обоих каналах, равных 150 рад/с, токе управления во втором канале 20 А и мощности в нагрузке 12 кВт на интервале времени 0–0,4 с.
- При постоянных и разных скоростях ω1m = 150 1/с, ω2m = 250 1/с; мощности в нагрузке 12 кВт, токе управления во втором канале 20 А на интервале времени 0,4–0,7 с.
- При постоянных и равных скоростях ω1m = 250 1/с, ω2m = 250 1/с, постоянном токе управления во втором канале 40 А на интервале времени 1–1,2 с.
- При постоянных скоростях ω1m = 250 1/с, ω2m = 250 1/с, постоянной мощности нагрузки в 24 кВт, постоянном токе управления во втором канале 40 А на интервале времени 1,2–1,5 с.
Переключение между перечисленными квазиустановившимися режимами осуществляется при скачкообразном изменении соответствующей переменной режима. В момент переключения в системе возникают переходные процессы. Моделирование осуществлялось в генераторной установке с FOC-управлением и в генераторной установке с оптимальным управлением в каждом канале.
Электромеханические процессы генераторной установки (рис. 9) представлены осциллограммами скорости и момента в каждом канале генераторной установки, а электромагнитные — токами в якоре машины в осях d и q соответствующего канала.

Рис. 9. Электромеханические и электромагнитные процессы генераторной установки:
а) с FOC-управлением;
б) с оптимальным управлением
Энергетические характеристики ГГУ (рис. 10) представлены активными, реактивными мощностями в каждом канале, а также мощностью в нагрузке.

Рис. 10. Энергетические процессы ГГУ:
а) с FOC-управлением;
б) с оптимальным управлением
Изменение скорости второго генератора (в момент t = 0,4 c) и изменение тока управления во втором канале (в момент t = 1 c) автоматически сказывается на энергетических процессах в цепи первого и второго генераторов. Изменение скорости вращения первого генератора (момент t = 0,7 с) не сказывается на распределении мощностей по каналам. Из сказанного следует, что управление распределением мощности между параллельно работающими генераторами можно осуществлять только по второму каналу ГГУ, предварительно задав требуемое распределение между мощностью в нагрузке и мощностью первого канала α = P11/Pds. Ток управления вторым каналом можно определить по уравнению:

в котором U12 — амплитуда основной гармоники фазного напряжения на стороне переменного тока АВ2.
Электромагнитные процессы при переключении между квазиустановившимися режимами представлены токами якоря обоих генераторов, током и напряжением нагрузки. Эти процессы приведены на рис. 11–14.

Рис. 11. Электромагнитные процессы в ГГУ при изменении скорости второго генератора в пределах 150–250 1/с в момент 0,4 с:
а) с FOC-управлением;
б) с оптимальным управлением

Рис. 12. Электромагнитные процессы в ГГУ при изменении скорости первого генератора в пределах 150–250 1/с в момент 0,7 с:
а) с FOC-управлением;
б) с оптимальным управлением

Рис. 13. Электромагнитные процессы в ГГУ при изменении тока управления АВ2 20–40 А в момент 1 с:
а) с FOC-управлением;
б) с оптимальным управлением

Рис. 14. Электромагнитные процессы в ГГУ при изменении нагрузки 12–24 кВт в момент 1,2 с:
а) с FOC-управлением;
б) с оптимальным управлением
Заключение
Создание интеллектуальных систем и сетей (Smart Grid), оптимизированных по энергетическим характеристикам, ставит задачу управляемого разделения мощности между отдельными параллельно включенными каналами. Эта задача не нова, аналогичные задачи решались и решаются в электрических сетях автономных объектов наземного, водного, подводного и авиационного транспорта. Классические системы параллельно работающих генераторов переменного тока [3, 14, 15, 16, 17] требуют применения сложных систем стабилизации скорости и напряжения и не гарантируют отсутствия обменных колебаний мощности между генераторами [11]. Проблемы стабилизации и разделения мощностей в значительной степени устраняются с применением современных мехатронных систем. Силовые полупроводниковые преобразователи в этих системах позволяют построить отдельные источники тока (slave mode) и соединить их параллельно, исключив при этом обменные колебательные процессы. Роль источника напряжения в таком случае (master mode) выполняет один из параллельно включенных каналов, на входе которого используется регулятор напряжения. Аналитическое исследование электромагнитных и энергетических характеристик двух генераторов позволяет интегрально оценить их свойства в установившихся режимах работы.
Разработанная и представленная в статье виртуальная модель позволяет исследовать любые возможные случаи перераспределения мощностей двух генераторов как в установившихся, так и переходных режимах работы.
- Булгаков А. А. Новая теория управляемых выпрямителей. М.: Наука, 1970.
- Бродовский В. Н., Иванов Е. С. Приводы с частотно-токовым управлением. М.: Энергия, 1974.
- Васьков А. Г., Тягунов М. Г. Распределенные системы энергоснабжения на основе гибридных энергокомплексов с установками возобновляемой энергетики // Новое в российской электроэнергетике. 2013. № 4.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Виртуальные лаборатории устройств силовой электроники и электромеханики в среде Matlab+Simulink. Урок 24. Мехатронная система с магнитоэлектрическим генератором и активным полупроводниковым выпрямителем // Силовая электроника. 2018. № 1.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Виртуальные лаборатории устройств силовой электроники и электромеханики в среде Matlab+Simulink. Урок 25. Мехатронная система с двумя генераторами в общей электрической сети переменного тока //Силовая электроника. 2018. № 2.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Виртуальные лаборатории устройств силовой электроники и электромеханики в среде Matlab+Simulink. Урок 26. Оптимизация энергетических свойств мехатронной системы с вентильной электрической машиной // Силовая электроника. 2018. № 3.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Виртуальные лаборатории устройств силовой электроники и электромеханики в среде Matlab+Simulink. Урок 28. Синтез оптимального управления генераторной установкой с вентильной электрической машиной //Силовая электроника. 2019. № 1.
- Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. Пер. с нем. М.-Л.: Госэнергоиздат, 1963.
- Овчинников И. Е. Вентильные электрические двигатели и привод на их основе (малая и средняя мощность). Курс лекций. СПб.: КОРОНА — Век, 2006.
- Розанов Ю. К. Силовая электроника. М.: Издательский дом МЭИ, 2007.
- Cавенко А. Е., Голубев А. Н. Обменные колебания мощности в судовых электротехнических комплексах. Иваново, 2016.
- Слежановский О. В., Дацковский Л. Х., Кузнецов И. С., Лебедев Е. Д., Тарасенко Л. М. Системы подчиненного регулирования электропривода переменного тока с вентильными преобразователями. М.: Энергоатомиздат, 1983.
- Соколовский Г. Г. Электроприводы переменного тока с частотным управлением. М.: Академия, 2006.
- Соснина Е. Н., Шалухо А. В., Липужин И. А. Simulink-модель ветродизельной электростанции с вставкой постоянного тока. Сборник статей Всеросс. науч.-техн. конф. Актуальные проблемы электроэнергетики. Нижний Новгород, 2015.
- Тимченко В. Ф. Колебания нагрузок и обменной мощности энергосистем. М.: Энергия, 1975.
- Токарев Л. Н. Математическое описание, расчет и моделирование физических процессов в судовых электростанциях. Л.: Судостроение, 1980 г.
- Ясаков Г. С. Корабельные электроэнергетические системы. Ч. 1. СПб., Военно-морская академия им. Адмирала Флота Советского Союза Н.Г. Кузнецова, 1999.
- German-Galkin S., Tarnapowicz D. ENERGY OPTIMIZATION OF MECHATRONIC SYSTEMS WITH PMSG. 3rd International Conference on Energy and Environmental Protection. Krakow, Poland, September 13–14, 2018.
- Park R. H. Two-reaction theory of synchronous machines: Generalized method of analysis — part 1. of AIEE. July, 1929.
 4 декабря, 2020
4 декабря, 2020 26 января, 2011
26 января, 2011 8 апреля, 2011
8 апреля, 2011