
Синтез ПИД-регулятора для понижающего импульсного преобразователя с аналитическим определением передаточной функции неизменяемой при синтезе части схемы и ручным подбором коэффициентов регулятора
Для синтеза регулятора напряжения методами теории автоматического управления необходимо иметь структурную схему преобразователя напряжения с передаточной функцией неизменяемой при синтезе части преобразователя. Передаточная функция неизменяемой части может быть получена различными способами. Наиболее точным методом получения передаточной функции неизменяемой части является аналитическое составление структурной динамической модели преобразователя [1–3]. К приближенным методам можно отнести получение передаточной функции по кривой разгона [4–6] или по снятым частотным характеристикам преобразователя.
Схема рассматриваемого преобразователя приведена на рис. 1 [7, 8], где пунктирными линиями показаны элементы и связи, не входящие непосредственно в контур регулирования выходного напряжения, поэтому дальше их можно не учитывать. Например, цепи защиты от превышения тока и понижения входного напряжения, а также компаратор спящего режима не задействованы при нормальной работе преобразователя.
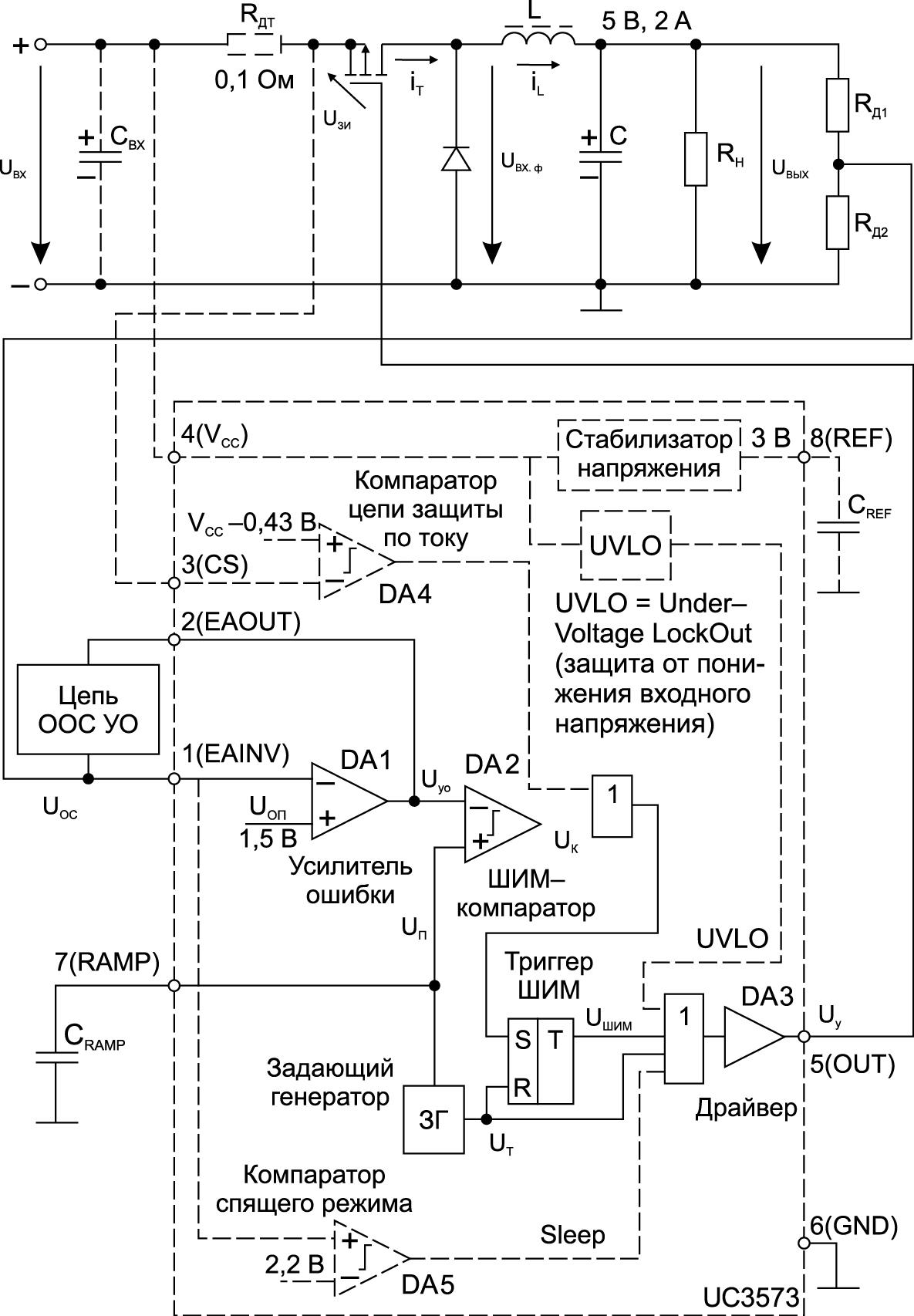
Рис. 1. Схема импульсного преобразователя с системой управления на микросхеме UC3573
Внешняя цепь отрицательной обратной связи (ООС) усилителя ошибки (УО) предназначена для настройки последовательного корректирующего устройства (регулятора), который реализуется на встроенном в микросхему операционном усилителе (ОУ). Конфигурация цепи ООС будет определять тип реализуемого регулятора.
В общем случае регулятор может иметь три составляющие: пропорциональную (П), интегральную (И), дифференциальную (Д). Выходное напряжение uуо(t) такого регулятора записывается следующим образом:

где e(t) = Uоп – uос(t) — ошибка регулирования, то есть разность опорного напряжения Uоп (задающего воздействия, чаще всего константы, для нашей схемы Uоп = 1,5 В) и сигнала обратной связи uос по регулируемой величине; Kп, Kи, Kд — коэффициенты составляющих регулятора.
Рассмотрим по отдельности действие трех возможных составляющих регулятора.
- Пропорциональная составляющая умножает величину ошибки регулирования на коэффициент Kп, увеличивая управляющее воздействие. Например, для рассматриваемой схемы при uвых > Uвых.ном получим uос > Uоп, поэтому e< 0 и система управления должна уменьшить относительную длительность управляющих импульсов, подаваемых на транзисторный ключ, а коэффициент Kп будет определять степень уменьшения длительности импульсов.
- Интегральная составляющая необходима, чтобы учесть «предыдущий опыт» работы регулятора и со временем сделать управление более точным. Поскольку интеграл — это сумма, то интегральный регулятор суммирует все предыдущие значения ошибки регулирования и делает на них поправку. Как только система выйдет на заданный режим, определяемый значением Uоп, ошибка регулирования будет близка к нулю и интегральная часть со временем будет все меньше влиять на работу регулятора.
- Дифференциальная составляющая учитывает скорость изменения ошибки регулирования, пытаясь предугадать ее поведение в будущем. Дифференциальная составляющая позволяет регулятору по-разному реагировать на резкие и плавные изменения регулируемой величины, тем самым избегая ее «раскачивания».
На практике чаще всего используются П-, ПИ-, ПД- и ПИД-регуляторы в зависимости от того, какие составляющие входят в уравнение для выходного сигнала регулятора (1).
После упрощения схемы на рис. 1 получим структурную схему системы автоматического регулирования выходного напряжения uвых (рис. 2), в которой блок умножителя реализует известное соотношение для средних значений входного и выходного напряжений в понижающем импульсном преобразователе [1], если считать коэффициент передачи фильтра Ф для постоянной составляющей Kф(0) = 1:
Uвых = gUвх, (2)
где g = t1/T — относительная длительность включенного состояния транзистора; t1 — абсолютная длительность включенного состояния транзистора; T — период переключения транзистора.

Рис. 2. Упрощенная структурная схема импульсного преобразователя:
УО — усилитель ошибки вместе с цепью обратной связи;
ШИМ — широтно-импульсный модулятор;
Ф — LC-фильтр с нагрузкой;
Д — делитель выходного напряжения; строго говоря в данной интерпретации регулируемой величиной является сигнал обратной связи uос, а не выходное напряжение uвых
На рис. 2 блоки широтно-импульсного модулятора (ШИМ) и умножителя неявно соответствуют всем основным элементам схемы на рис. 1, кроме явно выраженных остальных трех блоков (усилителя ошибки УО, фильтра Ф и делителя Д), то есть невозможно явно выделить элементы схемы на рис. 1, которые соответствуют на рис. 2 либо блоку ШИМ, либо умножителю. Можно только сказать, что к блоку ШИМ относится ШИМ-компаратор, триггер ШИМ и задающий генератор, а умножителю соответствует транзистор в силовой части схемы, который в открытом состоянии пропускает напряжение uвх на вход фильтра, а в закрытом состоянии — нет. Также нужно отметить, что в схеме на рис. 1 нет сигнала g, который появился на рис. 2 и связывает блоки ШИМ и умножителя.
Для пояснения принципа формирования блоком ШИМ сигнала g рассмотрим временные диаграммы работы преобразователя (рис. 3). Тактовый импульс uт сбрасывает асинхронный RS-триггер, после чего управляющий сигнал uу (напряжение на затворе) становится равным нулю, а напряжение uзи = uу – uвх = 0 – VCC = –VCC. Этим отрицательным напряжением транзистор открывается, и на входе фильтра появляется напряжение uвх, начинается отсчет периода T и времени t1, ток индуктивности iL начинает линейно нарастать, а конденсатор фильтра — заряжаться. Диод в течение времени t1 остается закрытым, поскольку к нему приложено обратное напряжение.

Рис. 3. Идеализированные временные диаграммы, поясняющие функционирование преобразователя (показан случай уменьшения длительности импульсов из-за превышения выходным напряжением номинального значения Uвых.ном)
В момент, когда нарастающее пилообразное напряжение uп сравняется с напряжением на выходе усилителя ошибки uуо, ШИМ-компаратор выдаст логическую 1, которая установит RS-триггер, после чего управляющий сигнал напряжения на затворе uу становится равным VCC, а напряжение uзи — равным 0, поэтому транзистор закрывается, и ток индуктивности iL продолжит протекать через открывшийся диод, но будет уже спадать, отдавая накопленную ранее энергию в нагрузку. Когда пилообразное напряжение uп становится равным 3 В, задающим генератором формируется тактовый импульс uт, во время которого пила спадает до 0,5 В, после чего начинается следующий период.
В данной системе управления имеет место инверсная логика управления транзистором, когда низкий уровень управляющего сигнала uу, формируемого микросхемой, приводит к отпиранию транзистора, а высокий уровень сигнала uу — к запиранию транзистора. Это связано с применением в преобразователе МДП-транзистора с индуцируемым каналом p-типа, поскольку при верхнем расположении силового транзистора, что имеет место в рассматриваемой схеме, использование транзистора с каналом p-типа упрощает формирование сигнала управления транзистором. При использовании n-канального транзистора для его отпирания на затвор пришлось бы подавать напряжение, превышающее входное напряжение по крайней мере на несколько вольт, что усложнило бы схему управления.
На рис. 3 показан случай увеличивающегося выходного напряжения и превышения им номинального значения Uвых.ном, при этом из-за действия ООС будем иметь уменьшающийся сигнал на выходе усилителя ошибки uуо. Как видно на рис. 3, импульс тока транзистора iт во время второго периода стал короче, чем был в первом периоде, что соответствует уменьшению значения g, а также среднего значения выходного напряжения Uвых, что следует из формулы (2).
Чаще всего сигнал обратной связи uос берется с выхода делителя напряжения (если регулируется напряжение) или с датчика тока (если регулируемой величиной является ток). В нашем случае регулируется выходное напряжение uвых(t) преобразователя, поэтому uос = Kд.нuвых, где коэффициент делителя напряжения на резисторах Rд1 и Rд2 (рис. 1) вычисляется по формуле:
Kд.н = Rд2/(Rд1+Rд2). (3)
Делитель выходного напряжения должен быть настроен так, чтобы при uвых = Uвых.ном ошибка регулирования была равна нулю. Из условия e = Uоп – uос = 0 получим Uоп = uос = Kд.нUвых.ном. Далее находим: Kд.н = Uоп/Uвых.ном = 1,5 В/5 В = 0,3.
Для определения требуемых сопротивлений плеч делителя нужно задаться значением тока Iд, протекающего в резисторах делителя при uвых = Uвых.ном (uос = Uоп), например, Iд = 1 мА. Тогда найдем сопротивление нижнего резистора делителя Rд2 = Uоп/Iд = 1,5 В/1 мА = 1,5 кОм. Такое значение, например, есть в номинальном ряду сопротивлений E24.
Сопротивление верхнего резистора делителя найдем по формуле, полученной из уравнения (3):
Rд1 = Rд2/Kд.н – Rд2 = Rд2(1/Kд.н – 1) = 1,5 кОм(1/0,3 – 1) = 3,5 кОм.
Такого значения нет в номинальном ряду сопротивлений E24, но его можно получить путем последовательного соединения двух резисторов со значениями 3,3 кОм и 200 Ом = 0,2 кОм из этого ряда.
Микросхема UC3573 позволяет реализовать схему последовательного регулятора, основанную на инвертирующем усилителе на ОУ с ненулевым потенциалом на неинвертирующем входе (рис. 4).

Рис. 4. Схема регулятора в общем виде
Получим выражение для выходного сигнала усилителя ошибки в общем виде (для любых типов реализуемых регуляторов). Поскольку входная цепь и цепь обратной связи могут быть частотно-зависимыми (содержать конденсаторы), то уравнения будем записывать в операторной форме. С учетом бесконечного входного сопротивления ОУ через комплексные сопротивления Zвх(p) и Zос.уо(p) протекает один и тот же ток I, направление которого может быть любым и в данном случае не имеет значения, а также стремления ОУ сравнять потенциалы на своих входах при наличии ООС, получим уравнение:

Откуда:

Из последнего выражения видно, что передаточная функция последовательного регулятора будет иметь вид:
а в структурной схеме к сигналу с выхода регулятора uр(t) нужно добавить значение Uоп = 1,5 В.
Следует отметить, что ОУ РН имеет напряжение питания 3 В и напряжение на его выходе не может быть больше этого значения, поэтому если в модели сигнал uуо(t) будет подниматься выше 3 В и опускаться ниже 0 В, то необходимо поставить блок Saturation с соответствующими уровнями ограничения.
В модели устройства необходимо учесть делитель выходного напряжения. Можно включить его в состав выходного фильтра с нагрузкой. Но более целесообразно отнести его к входной цепи усилителя ошибки. После применения к рис. 5а теоремы об эквивалентном генераторе получаем эквивалентную схему (рис. 5б),
где:
![]()

Рис. 5. Учет делителя выходного напряжения:
а) схема делителя;
б) схема эквивалентного ей генератора
Далее математически опишем блок ШИМ. Как следует из рис. 3, в момент пересечения кривых uуо и uп имеет место равенство uуо(t1) = uп(t1). Если учесть, что уравнение пилообразного напряжения в нашем случае будет иметь вид:

то при t = t1 получим:

Отсюда получаем математическое описание блока ШИМ:

Нам осталось найти передаточную функцию фильтра Ф, в состав которого кроме LC-фильтра придется включить и нагрузку Rн, поскольку учесть ее отдельно или в составе других блоков не получается. Если учитывать только три элемента — L, C, Rн, то из схемы для определения передаточной функции фильтра Wф(p) (рис. 6а) по формуле делителя напряжения следует:

Поскольку


Рис. 6. К определению передаточной функции блока фильтра Ф:
а) без учета;
б) с учетом активных сопротивлений реактивных элементов
Если учитывать также активные сопротивления элементов фильтра, то есть сопротивления дросселя r и эквивалентного последовательного сопротивления (ЭПС) конденсатора rС (рис. 6б), то получим:

После преобразования будем иметь:

где Kф = Rн/(Rн + r) ≈ 1 — коэффициент передачи фильтра на постоянном токе; tС = rСC — постоянная времени цепи выходного конденсатора;

Сопротивление r тоже может учитывать активные сопротивления соединяющих проводов, транзистора и диода в открытом состоянии, а также датчика тока (шунта) Rдт цепи защиты по току.
В итоге получаем структурную схему преобразователя с передаточными функциями отдельных ее блоков (рис. 7а). После преобразования схемы на рис. 7а получим структурную схему (рис. 7б), в которой передаточная функция неизменяемой при синтезе части системы W0(p) имеет вид:


Рис. 7. Структурные схемы импульсного преобразователя:
а) исходная;
б) преобразованная
где

Дальнейшее моделирование будем проводить при следующих исходных данных: Uвх = 12 В; Uвых.ном = 5 В; L = 10 мГн; C = 10 мкФ; rC = 0,8 Ом; r = 0,1 Ом; Rн = 100 Ом; частота переключения транзистора fп = 100 кГц. При этом получаем следующие значения параметров модели: tС = 8 мкс; Kф = 0,999; K0 = 1,1988; Tф = 3,17·10–4 c; zф = 0,17.
На рис. 8 представлены частотные характеристики для неизменяемой при синтезе части системы, построенные по передаточной функции (5). Как видно, имеет место низкий запас устойчивости по фазе (при более низких значениях коэффициента демпфирования фильтра zф запас устойчивости по фазе будет еще меньше за счет сдвига правее частоты среза).

Рис. 8. Частотные характеристики неизменяемой при синтезе части системы
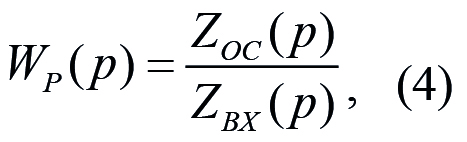
На рис. 9 представлены две Simulink-модели рассматриваемого понижающего преобразователя без регулятора, что соответствует случаю Wр(p) = 1.

Рис. 9. Simulink-модели рассматриваемого понижающего преобразователя
В верхней части рис. 9 представлена усредненная модель системы (рис. 7). В данной модели сигнал uуо не выходит за пределы диапазона 0–3 В, поэтому блок ограничения Saturation для сигнала uуо не используется.
В нижней части рис. 9 приведена имитационная модель преобразователя (рис. 1). В настройках операционного усилителя указываются ограничения для выходного сигнала (нижнее — 0, верхнее — 3 В). Из (4) видно, что для реализации на ОУ единичного усиления достаточно выполнить условие Zос(p) = Zвх(p), что проще всего на схеме реализовать установкой в цепи ОС резистора с сопротивлением Rос = Rвх = Rд = 1,05 кОм.
На рис. 10 представлены осциллограммы основных сигналов системы управления импульсным преобразователем, которые соответствуют рис. 3.

Рис. 10. Осциллограммы основных сигналов системы управления импульсным преобразователем
На рис. 11 представлены результаты сравнения двух Simulink-моделей (рис. 9). Видно, что результаты в целом похожи, но нужно учитывать, что усредненная модель не учитывает дискретность процессов, реально происходящих в импульсном преобразователе (с частотой переключения транзистора fп = 100 кГц). По переходным процессам выходного напряжения видно, что имеет место довольно большое перерегулирование (7,5–5)/5×100% = 50 % и статическая ошибка (5–4,5)/5×100% = 10%.

Рис. 11. Результаты сравнения двух Simulink-моделей (рис. 9)
Далее в усредненную модель добавим ПИД-регулятор, который представляет собой три отдельные цепи (пропорциональную, интегральную и дифференциальную) с соответствующими коэффициентами Kп, Kи, Kд, выходные сигналы которых суммируются. В Simulink невозможно поставить идеальное дифференцирующее звено с передаточной функцией Kдp, поскольку у передаточных функций порядок числителя не может быть больше порядка знаменателя, поэтому в дифференцирующей цепи поставим реальное дифференцирующее звено Kдp/(0,00001p+1) ≈ ≈ Kдp. Нужно заметить, что в ПИД-регуляторе в среде Simulink используется дифференцирующее звено с подобной передаточной функцией:

где параметр N называется Filter coefficient (коэффициент фильтра) и по умолчанию равен 100.
Путем «ручного» подбора коэффициентов выяснилось, что в ПИД-регуляторе для улучшения свойств замкнутой системы можно реально использовать только интегральную составляющую для устранения статической ошибки. При увеличении коэффициента пропорциональной части Kп сигнал uуо начинает «раскачиваться» и ограничиваться снизу и сверху порогами 0 и 3 В, о которых было сказано выше. При увеличении коэффициента дифференциальной части Kд сигнал uуо также «раскачивается», но с намного большей частотой, поскольку увеличивается быстродействие регулятора.
Приемлемые процессы на моделях с ПИД-регулятором (рис. 12) были получены при следующих значениях коэффициентов регулятора: Kп = 0,5 (коэффициент был уменьшен для приведения уровня перерегулирования до исходных значений; при больших значениях коэффициента Kп перерегулирование получается даже больше, чем было до введения ПИД-регулятора); Kи = 500; Kд = 0,000001 (введем хотя бы малый коэффициент дифференциальной части, чтобы продемонстрировать все нюансы синтеза ПИД-регулятора в нашем случае).
Рис. 12. Simulink-модели рассматриваемого понижающего преобразователя с ПИД-регулятором
Для синтеза ПИД-регулятора для имитационной модели выберем схему на рис. 13.

Рис. 13. Схема ПИД-регулятора на ОУ
Выведем выражение для передаточной функции для данной схемы:

где
![]()
Далее получим выражения для коэффициентов трех составляющих регулятора:

Выполним расчет ПИД-регулятора, который будет заключаться в нахождении номиналов всех пассивных элементов схемы.
Заметим, что у нас уже есть неявное сопротивление Rвх = Rд = 1,05 кОм, а конденсатор Свх должен быть параллелен ему. В данном случае Свх нужно подключить параллельно нижнему плечу делителя Rд2 (рис. 12).
По известному Rвх из формулы (7) можем выразить Свх и найти ее значение:

В номинальном ряду емкостей E24 ближайшее значение — 1,8 или 2,0 мкФ, в номинальном ряду E12 — 1,8 мкФ, поэтому выберем
Сос = 1,8 мкФ.
Осталось определить два значения (Rос и Свх) из системы двух уравнений (6) и (8). Выразив из (8) емкость
и подставив ее в уравнение (6), получим квадратное уравнение относительно Rос:

где

Для нашего случая b = –525; c = 551,25. Дискриминант квадратного уравнения больше нуля, поэтому имеем два действительных корня квадратного уравнения, в нашем случае Rос1 = 523,9 Ом; Rос2 = 1,05 Ом.
Выберем из двух вариантов наибольшее значение сопротивления с учетом ряда сопротивлений Е24: Rос = 510 Ом.
Тогда из уравнения (9) находим Свх = 1,96 нФ, а из номинального ряда емкостей E24 выберем ближайшее значение Свх = 2 нФ.
Поскольку при других исходных данных дискриминант квадратного уравнения может оказаться отрицательным, то нужно сделать важный вывод о том, что ПИД-регулятор можно синтезировать в виде схемы на рис. 13 не при всех значениях желаемых коэффициентов Kп, Kи, Kд. Такое ограничение возможно и для других схем ПИД-регуляторов на дискретных компонентах. Например, при выбранном коэффициенте Kи = 500 для остальных двух коэффициентов область допустимых значений (при которых дискриминант D ≥ 0) не такая уж и большая (рис. 14).

Рис. 14. Области допустимых (D ≥ 0) и недопустимых (D < 0) значений коэффициентов Kп и Kд при Kи = 500
На рис. 15 представлены осциллограммы сигналов для моделей с ПИД-регулятором. Видно, что статическая ошибка исчезла, а перерегулирование осталось.

Рис. 15. Результаты сравнения двух Simulink-моделей с ПИД-регулятором (рис. 12)
Выводы
- В статье приведен пример синтеза ПИД-регулятора для понижающего импульсного преобразователя с аналитическим определением передаточной функции неизменяемой при синтезе части схемы и ручным подбором коэффициентов регулятора. Описаны особенности синтеза регулятора, которые могут иметь место не только в этой схеме, но и в других подобных электронных устройствах.
- Показано, что использование ПИД-регулятора в подобных схемах позволяет лишь устранить статическую ошибку. По сути, в рассмотренном примере была полезной только интегральная составляющая регулятора, которая и помогла избавиться от ошибки регулирования.
- Для подавления колебательности системы и уменьшения перерегулирования лучше рассматривать передаточные функции регуляторов не с точки зрения классических типов регуляторов (ПИ, ПИД), а с точки зрения компенсации колебательной составляющей неизменяемой при синтезе части, что можно реализовать, например, при частотном синтезе последовательных корректирующих устройств.
- Белов Г. А. Динамика импульсных преобразователей. Чебоксары, Изд-во Чуваш. ун-та, 2001.
- Белов Г. А., Серебрянников А. В., Павлова А. А. Структурные и схемные динамические модели импульсных преобразователей // Вестник Чувашского университета. 2008. № 2.
- Белов Г. А., Серебрянников А. В., Павлова А. А. Структурные динамические модели и частотный метод синтеза двухконтурных систем управления импульсными преобразователями // Силовая электроника. 2008. № 3.
- Шаварин Н., Яров В., Лазарева Н. Двухфазный повышающий конвертер как звено системы автоматического управления // Силовая электроника. 2015. № 3.
- Бажанов В. Л. Определение передаточной функции объекта управления по экспериментальной кривой разгона на основе принципа масштабирования // Автоматизация в промышленности. 2011. № 1.
- Стельмащук С. В. Настройка ПИД-регулятора по кривой разгона объекта с самовыравниванием для максимального быстродействия с заданным перерегулированием при идентификации объекта моделью третьего порядка с запаздыванием // Вестник Тихоокеанского государственного университета. 2015. № 1.
- Белов Г. А., Серебрянников А. В., Павлова А. А. Синтез одноконтурной системы управления понижающим импульсным преобразователем // Практическая силовая электроника. 2013. № 3.
- Белов Г. А., Серебрянников А. В. Синтез понижающего импульсного преобразователя с одноконтурной системой управления и его исследование на компьютерной модели // Динамика нелинейных дискретных электротехнических и электронных систем (ДНДС-2013). Материалы X Всеросс. науч.-техн. конф. Чебоксары, Изд-во Чуваш. ун-та, 2013.
- Белов Г. А. Импульсные преобразователи с системами управления на серийных микросхемах. Чебоксары, Изд-во Чуваш. ун-та, 2015.
 22 июля, 2021
22 июля, 2021 28 декабря, 2020
28 декабря, 2020 29 ноября, 2020
29 ноября, 2020