
Структурные динамические модели и частотный метод синтеза двухконтурных систем управления импульсными преобразователями напряжения
Примером подобной ситуации является разработка корректоров коэффициента мощности, в которых использование оригинальной двухконтурной системы управления повышающим импульсным преобразователем, теоретически хорошо обоснованный выбор стратегии управления, ее структур и параметров позволили разработать и освоить серийное производство микросхемы для системы управления, обеспечивающей высокие энергетические, массо-габаритные и динамические характеристики [1]. Теперь эта микросхема стала стандартом и с небольшими изменениями выпускается рядом компаний.
Интересно проанализировать публикации по корректорам коэффициента мощности. В одной из первых статей по этой теме [2] был изложен принцип построения корректора коэффициента мощности (ККМ) на основе двухконтурной системы управления, однако схема управления оставалась непроработанной. Дальнейшие работы в области систем управления ККМ основывались на разработках математических моделей импульсных преобразователей, которые целенаправленно развивались и систематически публиковались, например в трудах международных конференций специалистов по силовой электронике (IEEE Power Electronics Specialists Conference). На базе этих моделей разрабатывались частотные методы синтеза систем управления импульсными преобразователями. Результаты анализа и синтеза по этим моделям оказали большое влияние на разработки серийных микросхем управления (ШИМ-контроллеров и других), некоторые структуры и даже схемы построения систем управления стали стандартными (но не навсегда), например, регулятор тока в быстродействующем токовом контуре обычно предлагается строить на базе ПИ-регуляторов. Как видно из зарубежных публикаций, каталогов продукции электронных компаний и другой фирменной документации, эти компании активно проводят научные проработки перспективной продукции, выделяя на это значительные ассигнования и привлекая для этого ведущих ученых в соответствующей области. Именно это позволяет им быстро внедрять последние научные достижения и сохранять ведущие позиции на рынке силовой электроники.
Предлагается параметры внешних компонентов микросхем управления определять не подбором, а с помощью максимально приближенных к практике частотных методов синтеза [3]. Это позволяет утверждать, что изучение и исследование только силовой части с разомкнутой системой управления совершенно недостаточны для разработок современной продукции в области силовой электроники.
Публикации, в которых описывается силовая часть с разомкнутой системой управления, позволяющая реализовать те или иные функции по преобразованию электроэнергии, регулированию скорости различных электродвигателей или обеспечению электропитания различных объектов, а система управления не раскрывается, выглядят красиво, но создают иллюзию, что остальное очень просто. Фактически на таком подходе у нас (и не только у нас) воспитаны целые поколения специалистов по силовой электронике. Неслучайно в работе [4] справедливо отмечается, что лишь немногие инженеры разбираются в вопросах синтеза систем управления импульсными источниками питания, поскольку это требует фундаментальных математических знаний, которые не так-то легко применить к проектированию реальных схем.
Несколько десятилетий назад, когда стали применять замкнутые системы управления ионными, тиристорными, а затем и транзисторными преобразователями, бóльшая часть вопросов, которые можно было решать при помощи математического анализа, решалась в ходе экспериментальных исследований на реальных макетных образцах. Инженеры-разработчики силовых электронных устройств многие часы проводили за экспериментальными стендами, наблюдая на экране осциллографа процессы в разрабатываемых схемах и добиваясь нужных процессов подбором параметров компонентов. При этом нередко наблюдались недопустимые или даже аварийные режимы, когда некоторые компоненты выходили из строя, и на основании этого делался вывод о том, что необходимо изменить тип или параметр каких-либо компонентов.
По мере усложнения схем чисто экспериментальный подход к синтезу становился все более несостоятельным, поскольку требовал от разработчика значительных затрат времени, сложного оборудования и большого опыта исследований. В связи с этим непрерывно возрастала роль теоретического анализа и расчета электронных схем. Как поступает большинство инженеров в настоящее время? Создается компьютерная модель с использованием известных стандартных программ, например MATLAB+ Simulink. Далее история повторяется. Начинается работа с этой моделью, отличающаяся от экспериментов на реальных установках, в основном, бóльшим удобством и тем, что модель не может «сгореть». Однако аппаратные и программные ресурсы ЭВМ при этом используются неэффективно (получается «стрельба из пушки по воробьям»), а это зачастую приводит к недостаточному быстродействию и точности работы программы при моделировании импульсных преобразователей с замкнутыми системами управления на базе широтно-импульсной модуляции (ШИМ). Многими исследователями замечено, что такие программы прекрасно работают при моделировании разомкнутых систем, но начинают основательно «барахлить» при замыкании импульсной системы, в частности, не обеспечивают определения с достаточной точностью времени открытого состояния силового транзистора в переходном процессе. Подобные модели не могут работать в реальном масштабе времени и использоваться для управления быстродействующим токовым контуром импульсного преобразователя. При использовании таких моделей большие трудности представляет определение стратегии управления и структуры систем управления ранее малоисследованными полупроводниковыми преобразователями.
Анализ и синтез устройств силовой электроники с замкнутыми системами управления существенно усложняется по сравнению с разомкнутыми системами. Моделирование преобразователя с разомкнутой системой управления на компьютере дает прекрасный результат, но уже попытка замыкания системы сопряжена со сложностями. Они начинаются с того, что для замыкания системы надо хотя бы знать структуру системы управления, а она должна быть кем-то обоснована. Далее возникает вопрос, как представить в компьютерной модели ШИМ? Нужно ли использовать точную дискретную модель ШИМ или можно заменить его пропорциональным звеном? В последнем случае нужно применить метод усреднения, и, следовательно, необходима усредненная модель силовой части. А где ее взять? В США для этой цели разработаны и широко используются усредненные схемные модели импульсных преобразователей [5–7], которые наши специалисты почему-то практически не используют.
Метод усреднения дает хорошие результаты при анализе динамики преобразователя, но при одном условии — если обеспечена устойчивость системы и она достаточно удалена от границы устойчивости. Анализ же устойчивости быстродействующего контура, в котором находится ШИМ, должен проводиться с учетом дискретности преобразователя. А это очень сложно для большинства инженеров. В американских работах эта трудность преодолевается тем, что использование усредненных моделей дополняется проверкой устойчивости «быстрого» контура, в котором находится ШИМ, по упрощенному критерию, обоснованному еще в ранних работах по динамике импульсных преобразователей для случая модуляции заднего фронта импульса на выходе ШИМ [7]. Этот критерий может быть сформулирован следующим образом: для устойчивости (в малом) широтноимпульсного преобразователя необходимо и достаточно, чтобы в стационарном режиме наклон кривой управляющего сигнала uу, сравниваемого в ШИМ с пилообразным сигналом uп, на интервале выключенного состояния силового транзистора T – t0 превышал наклон пилообразного сигнала не более, чем в два раза (рис. 1б). Этот критерий устойчивости точен, когда непрерывная часть быстродействующего контура, в который входит ШИМ, имеет первый порядок и кривая управляющего сигнала uу (t) на участке T – t0 может быть аппроксимирована отрезком прямой. В методиках расчета рекомендуется выбирать параметры контура так, чтобы наклон кривой управляющего сигнала на интервале T– t0 совпадал с наклоном пилы [3, 7]. Тогда получается двукратный запас устойчивости по коэффициенту усиления, процессы в контуре завершаются за один интервал дискретизации T. К сожалению, в настоящее время редко бывают случаи, когда непрерывная часть «быстрого» контура имеет первый порядок. В этот контур обычно входят силовой дроссель и регулятор тока первого или второго порядка, суммарный порядок непрерывной части контура тогда равен двум или даже трем. Тем не менее, указанную рекомендацию продолжают использовать даже в методиках расчета ККМ [1]. При этом с наклоном пилы сравнивается некоторый средний наклон кривой uу (t) (штриховая линия на рис. 1в) на интервале закрытого состояния силового ключа, и критерий устойчивости становится неточным. Проверка устойчивости системы, рассчитанной в [1], точными дискретными методами [8] показывает устойчивость системы, рассчитанной в [1] по приближенному критерию устойчивости. Это связано с тем, что при приближенном расчете предусматривается двукратный запас устойчивости.

Рис. 1.
а) Схема ШИМ, временные диаграммы для ШИМ, входящего в состав системы управления импульсным преобразователем, uшим — импульс на выходе ШИМ;
б) на границе устойчивости;
в) с двукратным запасом устойчивости (по коэффициенту усиления)
Наиболее эффективны специализированные программы анализа и синтеза преобразовательных устройств, написанные самими проектировщиками с использованием удачно выбранных математических моделей отдельных узлов.
Структурные и схемные модели импульсных преобразователей имеют определенные преимущества перед другими видами динамических моделей: наглядность, возможность их исследования с использованием хорошо разработанного математического аппарата, удобство использования при синтезе и некоторые другие [1–3].
В статье рассматриваются структурные модели импульсных преобразователей, обоснованные в различных работах [9–11]. Основное внимание уделяется усредненным моделям, которые наиболее удобны для практики, поскольку позволяют применять к нелинейным дискретным системам, к которым относятся импульсные преобразователи с замкнутыми системами управления, хорошо разработанные и известные большинству инженеров методы анализа и синтеза линейных непрерывных систем. Дается сравнение структурных моделей с широко используемыми в американской литературе схемными моделями. Причем схемными моделями мы называем динамические модели импульсных преобразователей и других преобразовательных устройств, представляющие собой электрические цепи с их стандартными элементами (активные сопротивления, индуктивности, емкости, источники напряжения и тока). Показано использование структурных моделей при синтезе систем управления частотным методом.
Динамические модели импульсных преобразователей
На рис. 2 представлены основные схемы силовых частей импульсных преобразователей, из которых наиболее широкое применение имеет понижающая схема; повышающий преобразователь служит основой для построения большинства маломощных корректоров коэффициента мощности. Инвертирующая схема достаточно широко применяется в качестве однотактного преобразователя с обратным включением выпрямительного диода (или, как его еще называют, однотактного обратноходового преобразователя). На основе этих простейших схем строятся также составные преобразователи [5].

Рис. 2. Схемы импульсных преобразователей:
а) понижающая;
б) повышающая;
в) инвертирующая
Для учета нагрузки, которая не может быть представлена постоянным активным сопротивлением R, параллельно ему включен источник дополнительного тока нагрузки iн.д., который может изменяться со временем.

Рис. 3.
а) Нелинейные импульсные модели для режима прерывистого тока понижающего преобразователя;
б) повышающего и инвертирующего преобразователей
Известны точные нелинейные импульсные модели импульсных преобразователей [8, 9] (рис. 3). Ключи в структурных схемах (рис. 3) представляют собой однонаправленные звенья, замыкающиеся на время, записанное под их изображением. Под изображением ключа К1 на рис. 3б без скобок дано время замкнутого состояния в повышающей схеме, в скобках — в инвертирующей схеме; t0 — время включенного состояния силового транзистора; tc — время спада тока дросселя. Выходная величина ключа обозначена так же, как и входная, но со звездочкой (u*вх, i*L, u*вых). В режиме непрерывного тока в этих моделях надо принять tc=T– t0, где T — период дискретизации. Линейные инерционные блоки в структурных схемах (рис. 3) имеют передаточные функции
G (p) = 1 / [r (T1p + 1)];
Z (p) = [R (1 + rCCp)] / [1 + (R + rC) Cp], (1)
где r — активное сопротивление цепи дросселя; T1 = L/r — постоянная времени цепи дросселя; rC — эквивалентное последовательное активное сопротивление выходного конденсатора.
В книге [4] (перевод которой, к сожалению, содержит много ошибок, видимо, из-за его небрежного редактирования) отмечена необходимость учета при синтезе эквивалентного последовательного сопротивления конденсатора и указано, что многие производители конденсаторов не предоставляют значения rC, поэтому рекомендуется его определять из выражения для сопрягающей частоты на асимптотической ЛАЧХ конденсатора:
где для оксидно-электролитических алюминиевых конденсаторов f = 1–5 кГц; для танталовых конденсаторов f=10–25 кГц; С — емкость конденсатора. Если частота f оказывается в существенной для динамики преобразователя полосе частот, то необходимо учитывать влияние сопротивления rC при анализе и синтезе.
В правильности нелинейных импульсных моделей (рис. 3) легко убедиться, записав и сравнив дифференциальные уравнения для отдельных рабочих интервалов времени в реальных системах (рис. 2) и моделях (рис. 3).
Заметим, что в рассмотренных моделях (рис. 3) не учтены защитные цепи (снабберы), формирующие благоприятные траектории переключений силовых полупроводниковых приборов, поскольку при использовании современных быстродействующих полупроводниковых приборов эти цепи обычно не оказывают существенного влияния на динамику замкнутых систем управления. При необходимости их влияние можно учесть, аппроксимируя искаженные за счет этих цепей формы импульсов напряжения и тока прямоугольными и учитывая небольшие задержки фронта и спада импульсов.
Нелинейные импульсные структурные модели (рис. 3) точно отражают процессы в преобразователях и могут служить основой для обоснования линейных импульсных, а также нелинейных усредненных и линеаризованных моделей [8, 9, 11]. Они справедливы как в режиме непрерывного тока дросселя, так и в режиме прерывистого тока.
В соответствии с принципом разделения движений точные импульсные модели необходимы, например, при анализе устойчивости «быстрого» токового контура [8]. Во многих случаях возможно использование приближенных усредненных моделей. Они строятся на основе метода усреднения, давно успешно применяемого в различных областях техники. Применительно к импульсным преобразователям он состоит в том, что на различных рабочих интервалах записываются дифференциальные уравнения для токов в индуктивностях iL и напряжений на конденсаторах uC, эти уравнения решаются относительно производных diL/dt и duC/dt и интегрируются за период T. В результате этого приращения за период ΔiL (T) и ΔuC (T) выражаются через средние значения тока и напряжения:

И, наконец, принимается основное упрощающее допущение метода усреднения:

После этого получаются дифференциальные уравнения относительно средних значений тока и напряжения.
При малых пульсациях тока и напряжения равенства (2) выполняются достаточно точно, но с ростом пульсаций дают все большую погрешность.
Усредненные схемные модели импульсных преобразователей были обоснованы еще в работах [5–7].

Рис. 4. Структурные (а и в) и схемные (б и г) усредненные модели понижающего преобразователя в режиме непрерывного тока, где uсх = uвх.ср, γ = t0/T
На рис. 4 показаны структурные (а и в) и схемные (б и г) усредненные модели понижающего преобразователя в режиме непрерывного тока. Нелинейная структурная модель (рис. 4а) получается из нелинейной импульсной модели (рис. 3а) заменой ключа К1 пропорциональным звеном с коэффициентом передачи, равным относительной длительности замкнутого состояния ключа γ = t0/T, и заменой тока и напряжений средними значениями iL.ср, uвх.ср и т. д. Это допустимо в режиме непрерывного тока.
Нелинейные усредненные модели для режима прерывистого тока приведены на рис. 5. Как видно, в этом режиме дроссель превращается в безынерционное звено. Линеаризация этих моделей (рис. 5) затруднена тем, что при этом необходимо учитывать зависимость относительного времени спада тока γс = tc/T от среднего значения тока дросселя iL.ср.

Рис. 5. Нелинейные структурные модели в режиме:
а) прерывистого тока понижающего преобразователя;
б) повышающего преобразователя;
в) инвертирующего преобразователя
Далее будем рассматривать только модели для режима непрерывного тока.
Записывая уравнения

вытекающие из структурной модели (рис. 4а), в виде

где согласно (1)
получаем известную из [5] схемную модель понижающего преобразователя (рис. 4б).
Линеаризация нелинейных структурной и схемной моделей (рис. 4а–б) приводит к моделям, представленным на рис. 4в–г соответственно. Из линеаризованной схемной модели (рис. 4г) получим передаточные функции по управляющему воздействию:

и по возмущающим воздействиям:

где Z1(p)=Lp + r;

Формальный переход от нелинейной импульсной модели (рис. 3б) к усредненной путем замены ключей пропорциональными звеньями в случае режима непрерывного тока повышающего или инвертирующего преобразователей приводит к усредненной нелинейной структурной схеме (рис. 6а), где γсх = 1 и γсх = γ — для повышающего или инвертирующего преобразователей соответственно; G’(p)=G (p), r’ = r.
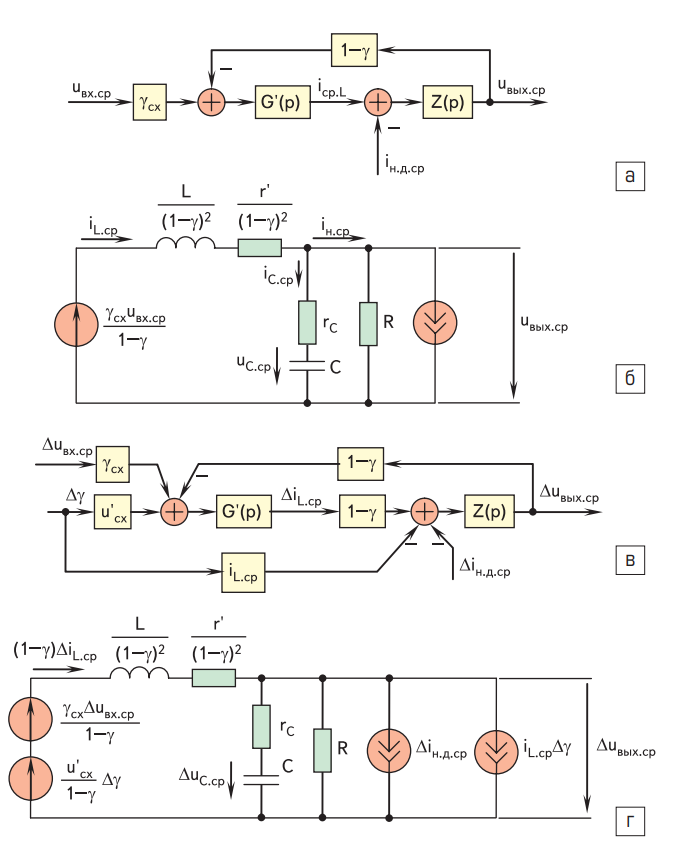
Рис. 6. Усредненные динамические модели повышающего и инвертирующего преобразователей:
а) нелинейная структурная;
б) нелинейная схемная;
в) линеаризованная структурная;
г) линеаризованная схемная
Нелинейная схемная модель повышающего и инвертирующего преобразователей (рис. 6б) вытекает из структурной модели (рис. 6а) так же, как и в случае понижающего преобразователя (рис. 4а–б). Аналогично получаются линеаризованные модели (рис. 6в–г).
Эти модели (рис. 6а–б) иногда требуют уточнения в связи с тем, что выходное напряжение в повышающем и инвертирующем преобразователях с учетом сопротивления rC представляет собой негладкую функцию времени [5]. Тогда эквивалентное последовательное активное сопротивление цепи дросселя определяется по формуле:

На первый взгляд кажется, что, поскольку на практике затруднительно точно определить сопротивление r, которое включает в себя активное сопротивление обмотки дросселя и соединительных проводников, сопротивление открытого транзистора или диода, то небольшая добавка γ(1 – γ) rC (максимальное значение которой получается при γ=0,5 и равно 0,25rC) может быть проигнорирована. Однако конкретное значение этой добавки, появляющееся при усреднении уравнений с учетом скачков выходного напряжения за счет сопротивления rC, зависит от значения rC и иногда может быть существенным. В большинстве случаев можно не обращать внимания на соотношение (8) и считать rґ = r. Кстати, аналогичное равенство, приведенное в книге [5], отличается от (8) тем, что вместо rC в него входит rC ||R.
Из сравнения схем на рис. 4в, г и рис. 6в, г видно, что линеаризованные усредненные модели повышающего и инвертирующего преобразователей отличаются от моделей понижающего преобразователя не только уточнением активного сопротивления цепи дросселя, но и тем, что эквивалентные индуктивность L/(1 – γ)2 и активное сопротивление r`/(1 –γ)2 зависят от γ, то есть в конечном итоге — от времени. Кроме того, в выходной цепи моделей повышающего и инвертирующего преобразователей имеется источник тока iL.срΔγ, учитывающий влияние приращений Δγ на выходное напряжение.
К интересным практическим выводам приводят выражения для передаточных функций силовой части повышающего и инвертирующего преобразователей. Из линеаризованной модели (рис. 6в или 6г) получаем передаточные функции по управляющему воздействию:

и по возмущающим воздействиям:

где коэффициент передачи делителя с учетом (1) равен:

и

Как видно из выражений 9–13, передаточная функция контура напряжения повышающего и инвертирующего преобразователей по управляющему воздействию содержит кроме отрицательного нуля –1/rCC, имеющегося в передаточных функциях по возмущающим воздействиям, и положительный нуль 1/τ. Следовательно, эти преобразователи относятся к неминимально-фазовым системам, что затрудняет их проектирование по сравнению с понижающим преобразователем. Постоянная времени τ согласно (13) и (12) приближенно равна для повышающего преобразователя:

для инвертирующего преобразователя:
где Rн.экв =uвых.ср/iiiн.ср — эквивалентное сопротивление нагрузки, учитывающее как сопротивление R, так и дополнительный ток нагрузки iн.д.ср.
Отметим, что во всех линеаризованных моделях и соотношениях, полученных по ним, все токи и напряжения, а также значение γ определяются для стационарного режима, в окрестности которого выполнена линеаризация.
Представленные здесь динамические модели будут полезны для специалистов, желающих оптимизировать режимы работы и показатели качества, выяснить предельные (с точки зрения динамики) возможности создаваемой ими продукции в области силовой электроники. Тогда придется написать небольшую программу для ЭВМ с использованием подходящей модели. Они могут быть полезны также для тех, кто недооценивает значение теоретической проработки разрабатываемых устройств, предпочитает все рабочее время проводить за компьютером, целиком полагаясь на возможности стандартных программ, но убедился на практике в том, что неплохо предварительно хотя бы приближенно рассчитать (как говорят, «прикинуть») параметры системы управления преобразователем. Тогда существенно облегчается проведение компьютерных экспериментов, поскольку характеристики устройств силовой электроники с замкнутыми системами управления зависят от большого числа параметров.
Из этих моделей легко получаются также выражения для статических характеристик силовой части преобразователей. Для этого в нелинейных моделях (рис. 4а; 5а; 6а) полагаем p = 0. Тогда, например, для понижающего преобразователя из схемы на рис. 4а с учетом выражений (1) получаем уравнения для режима непрерывного тока:

Из первого уравнения с учетом второго, записанного в виде iL.ср = iiн.ср = uвых.ср / R + iн.д.ср, находим формулу для внешних характеристик:
Аналогично, для режима прерывистого тока из схемы на рис. 5а имеем уравнение:

которое необходимо дополнить соотношением для определения относительной длительности спада тока дросселя γс; второе уравнение такое же, как и в режиме непрерывного тока. Отсюда получим:

где, как известно из [9],

Таким же образом, используя уравнения, которые являются следствием усредненной структурной модели (рис. 6а) при p = 0, можно получить выражения для внешних и регулировочных характеристик повышающего и инвертирующего преобразователей.
Структурные модели импульсных преобразователей с двухконтурной системой управления
Представленные динамические модели могут служить основой при различных методах синтеза систем управления. Для инженерной практики наиболее удобен частотный метод.
Широкое распространение получили двухконтурные системы управления импульсными преобразователями, называемые также системами с подчиненным регулированием. Внутренний контур, в который входит ШИМ, осуществляет регулирование тока дросселя [1–3], а в системе регулирования среднего значения тока — и тока транзистора или диода [3]. Задающим сигналом контура регулирования тока (или просто токового контура) является выходной сигнал регулятора напряжения. Внешний контур выполняет регулирование выходного напряжения преобразователя. В настоящее время различными компаниями производится большое количество интегральных схем ШИМ-контроллеров, позволяющих реализовать этот принцип управления. Однако это не освобождает проектировщиков от необходимости определять требуемую передаточную функцию регуляторов тока и напряжения.
Наиболее целесообразными представляются такие методы проектирования импульсных преобразователей, при которых на первом этапе силовая часть и система управления рассчитываются по известным аналитическим соотношениям, затем с использованием стандартных программ рассчитываются необходимые характеристики и показатели качества и при необходимости происходит уточнение параметров в ограниченной области значений.
Анализ и синтез импульсных преобразователей с подчиненным регулированием обычно проводится на основе метода разделения движений на «быстрые» (во внутреннем контуре) и «медленные» (во внешнем контуре). Задача усложняется дискретностью системы.
Рассмотрим особенности синтеза, воспользовавшись упрощенными линейными импульсными моделями замкнутой системы (для режима непрерывного тока) [11]. Начнем со структурной схемы понижающего импульсного преобразователя с двухконтурной системой управления (рис. 7а). Упрощения, сделанные при замыкании системы, не коснулись элементов, входящих в наиболее быстродействующий токовый контур, в который входит также импульсный элемент ИИЭ.

Рис. 7.
а) Структурная схема понижающего импульсного преобразователя с замкнутой системой управления;
б) схема контура тока;
в) схема контура напряжения
Прежде всего заметим, что силовая часть в схеме на рис. 7а полностью совпадают со структурой, полученной на рис. 4в. Отличие состоит только в том, что сигналы в линеаризованной усредненной модели (рис. 4в) представляют собой отклонения средних значений токов и напряжений (ΔiL.ср, Δuвых.ср и т. д.) от их стационарных средних значений, а в рассматриваемой структурной схеме (рис. 7а) соответствующие сигналы обозначают отклонения мгновенных значений.
Линеаризованный широтно-импульсный модулятор представлен идеальным импульсным элементом (ИИЭ), генерирующим дельта-импульсы с площадью, пропорциональной приращению длительности импульса Δt0 на выходе ШИМ, и двумя пропорциональными звеньями с коэффициентами передачи Kшим и uвх. В результате этого площади мгновенных импульсов (дельта-импульсов), действующих на входе звена G (p), оказываются равными KшимuвхΔuрт (nT +t0), где uрт (nT + t0) — дискретное значение выходного напряжения регулятора тока (РТ) в момент t = nT + t0 генерации дельта-импульса; здесь n — любое целое число.
Контур тока замыкается в соответствии с уравнением:
где uвх.рт — входное напряжение регулятора тока, uрн — выходное напряжение регулятора напряжения; Rдт — сопротивление передачи датчика тока дросселя.
Поскольку в теории [13] частотный метод синтеза разработан для систем с единичной обратной связью, уравнение замыкания контура тока представим в виде:
где gт = uрн/Rдт — задающий сигнал токового контура. Тогда становится понятным появление перед суммирующим звеном токового контура звена с коэффициентом передачи Rдт–1, а после суммирующего звена — звена с коэффициентом передачи Rдт (рис. 7а). В свою очередь перед суммирующим звеном токового контура появляется звено с коэффициентом передачи Rдт –1, а после суммирующего звена — звено с коэффициентом передачи Rдт (рис. 8а).

Рис. 8.
а) Полная структурная схема повышающего и инвертирующего преобразователей;
б) схема контура тока;
в) схема контура напряжения
Аналогично, контур напряжения замыкается согласно равенству:
где uвх.рн — входное напряжение РН, Uоп — опорное напряжение; Kд — коэффициент передачи делителя. Представим это равенство в виде
где Uзад =Uоп/Kд — задающее напряжение контура напряжения. Обратную связь по напряжению также преобразуем в единичную.
Теперь нарисуем отдельно структурную схему токового контура, объединив последовательно соединенные пропорциональные звенья (Kшим и uвх) с учетом того, что пропорциональные звенья можно переносить через импульсный элемент (рис. 7б) и структурную схему контура напряжения (рис. 7в). При этом влияние контура напряжения на контур тока учитывается через задающее Δgт и возмущающее Δfт воздействия, причем согласно полной структурной схеме
Здесь важно отметить, что, поскольку изменение входного Δuвх и выходного Δuвых напряжений (которые согласно принятому допущению происходят значительно медленнее, чем изменения тока дросселя) должны учитываться как возмущающее воздействие токового контура Δfт, то их влияние намного слабее, чем влияние на динамику задающего воздействия Δgт. В частности, они никак не влияют на устойчивость токового контура.
При создании структурной схемы контура напряжения (рис. 7в) необходимо учесть, что управляющий сигнал контура распространяется через контур тока, который представлен с помощью уравнения для замкнутого токового контура:
где Фт (p) — главная передаточная функция замкнутого контура тока; Фт.в (p) — передаточная функция для возмущения токового контура Δfт (t).
При хорошем качестве регулирования в токовом контуре, рассматривая контур напряжения, можно считать, что Фт (p) ≈ 1, Фт.в (p) ≈ 0. Это существенно упростит модель контура напряжения (рис. 7в).
Аналогично рис. 7 с учетом [11] можем изобразить структурные модели повышающего и инвертирующего преобразователей с замкнутыми контурами управления (рис. 8), где для повышающего преобразователя γсх = 1, uсх = uвых (t0), для инвертирующего γсх = γ, uсх=uвх (t0)+uвых (t0). Кроме этих отличий линеаризованная структурная модель (рис. 8а) отличается от модели понижающего преобразователя (рис. 7а) наличием ветви с коэффициентом передачи iL (t0) и двух пропорциональных звеньев с коэффициентами передачи 1 – γ. Возмущающее воздействие токового контура (рис. 8б):
После некоторых преобразований получаем расчетную структуру контура напряжения (рис. 8в), где

величина u1 определяется по формуле (12). Как видно, при отсутствии учета эквивалентного последовательного сопротивления конденсатора uґсх =uсх.
Поскольку согласно (18) и (20) в состав выражения для возмущающего воздействия токового контура Δfт входит напряжение Δuвых, это создает дополнительную местную отрицательную обратную связь в звене Z (p), которая отсутствует при Фт.в (p) = 0.
Сравнивая структурные модели на рис. 7б и 8б, замечаем, что между токовыми контурами понижающего (рис. 7б) и повышающего и инвертирующего (рис. 8б) преобразователей нет принципиальных отличий с точки зрения синтеза регулятора тока. Контуры напряжения, как видно из сравнения структурных схем на рис. 7б и 8б, имеют принципиальные отличия. Эти отличия, в первую очередь, заключаются в том, что в передаточной функции контура напряжения повышающего или инвертирующего преобразователей имеется неминимально-фазовый сомножитель 1 – pτ, где τ определяется по формуле (13). Этот сомножитель дает дополнительный отрицательный сдвиг по фазе, уменьшающий запас устойчивости контура по фазе, либо даже вызывающий нарушение устойчивости. Другое отличие состоит в том, что звено Z (p), учитывающее нагрузку преобразователя, оказалось охваченным дополнительной местной обратной связью через звено F (p).
В повышающем и инвертирующем преобразователях дополнительная связь образуется также из-за того, что в состав возмущающего воздействия контура напряжения Δfн = iL.срΔγ + Δiн.д.ср входит слагаемое iL.срΔγ.
Частотный метод синтеза импульсных преобразователей
Линеаризованные динамические модели контуров тока и напряжения импульсных преобразователей позволяют организовать сначала синтез контура тока, а затем контура напряжения. Синтез контура тока по импульсной модели (рис. 7б и 8б) освобождает проектировщика от необходимости проверять устойчивость, например, по критерию, проиллюстрированному на рис. 1. Синтез контура напряжения по моделям на рис. 7в и 8в ни- чем не отличается от обычного синтеза линейных непрерывных систем [13]. Задачей синтеза является определение передаточных функций регуляторов тока Wрт (p) и напряжения Wрн (p).

Рис. 9. Линейные модели для синтеза токового контура
Отнеся коэффициенты передачи Rдт, Kшимuсх к неизменяемой части системы, исключая символ Δ перед переменными, обозначая выходную переменную через x и отсчитывая время от моментов формирования дельта-импульсов импульсным элементом, из моделей токового контура (рис. 7б и 8б) получаем структурную схему, представленную на рис. 9а, где передаточная функция неизменяемой части вычисляется по формуле:
W0(p) = K0 / (T1p + 1), (22)
K0 = (Rдт/r) Kшимuсх — коэффициент усиления неизменяемой части; uсх — напряжение схемы, равное uвх.ср, uвых.ср и uвх.ср + uвых.ср соответственно для понижающего, повышающего и инвертирующего преобразователей; Wк (p) = Wрт (p).
В качестве примера оценим коэффициент усиления K0 в повышающем преобразователе при Rдт=0,25 Ом; r=0,5 Ом; uсх = uC.ср =400 В; амплитуда пилы Uп = 5 В; Kшим ≈ T/Uп. Тогда
Частотный метод синтеза с помощью логарифмических частотных характеристик (ЛЧХ) включает в себя построение желаемой ЛАЧХ разомкнутой системы, низкочастотная часть которой строится исходя из заданных требований к точности регулирования. С учетом этих требований желаемая ЛАЧХ проводится выше некоторой контрольной точки, а затем определяется требуемый коэффициент усиления разомкнутой системы [13, 14].
Учет требований к точности регулирования
Поскольку в большинстве случаев задающее воздействие системы не является синусоидальным, определяется эквивалентное синусоидальное задающее воздействие gэ (t) = aэsinωэt [13]. Здесь aэ и ωэ — амплитуда и круговая частота этого воздействия, определяемые выражениями

Определение эквивалентного синусоидального задающего воздействия при проектировании импульсных преобразователей имеет свои особенности, зависящие от их назначения и схемы силовой части. Рассмотрим их применительно к контуру тока импульсного преобразователя. В этом случае значения ![]() max и
max и ![]() max не могут превышать максимальную скорость max и ускорение max среднего значения регулируемого тока, определяемые найденными ранее значениями индуктивности L и емкости C.
max не могут превышать максимальную скорость max и ускорение max среднего значения регулируемого тока, определяемые найденными ранее значениями индуктивности L и емкости C.
Добиваясь от преобразователя предельного быстродействия, следует принимать значения ![]() max и
max и ![]() max равными соответственно значениям diL.ср /dt, d2iL.ср /dt2, вычисленным по усредненным моделям (рис. 4а и рис. 6а). При этом индуктивность L и емкость C рассчитываются по известным формулам [9], если преобразователи используются в качестве стабилизаторов напряжения, в которых конденсатор служит для подавления высокочастотных пульсаций, изменяющихся с частотой переключения транзистора. В корректорах коэффициента мощности, обычно выполняемых на базе повышающего преобразователя, выходной конденсатор рассчитывается из условия сглаживания низкочастотных пульсаций, изменяющихся с удвоенной частотой питающей сети, и емкость этого конденсатора оказывается значительно больше, чем в первом случае. В корректорах коэффициента мощности справедливо уравнение:
max равными соответственно значениям diL.ср /dt, d2iL.ср /dt2, вычисленным по усредненным моделям (рис. 4а и рис. 6а). При этом индуктивность L и емкость C рассчитываются по известным формулам [9], если преобразователи используются в качестве стабилизаторов напряжения, в которых конденсатор служит для подавления высокочастотных пульсаций, изменяющихся с частотой переключения транзистора. В корректорах коэффициента мощности, обычно выполняемых на базе повышающего преобразователя, выходной конденсатор рассчитывается из условия сглаживания низкочастотных пульсаций, изменяющихся с удвоенной частотой питающей сети, и емкость этого конденсатора оказывается значительно больше, чем в первом случае. В корректорах коэффициента мощности справедливо уравнение:

где ωс =2πfс — круговая частота питающей сети, Uвх.m — амплитуда синусоидального входного напряжения, IL.ср.m — амплитудное значение входного тока без учета высокочастотных пульсаций. Из этого уравнения видно, что через конденсатор протекает переменный ток с частотой 2ωс и амплитудой Uвх.mIL.ср.m/(2uC.ср), который вызывает пульсации напряжения с амплитудой Uвх.mIL.ср.m/(4ωсuC.ср). Поэтому требуемая емкость вычисляется по формуле:

где Pвх =Uвх.mIL.ср.m/2 — средняя за период сети входная мощность; Kп — допустимый коэффициент пульсаций выходного напряжения. Например, при fс=50 Гц, Kп=0,01, uC.ср = 400 В из последней формулы следует C ≥10–6Pвх, то есть требуемая емкость составляет 1 мкФ на 1 Вт входной мощности.
Используя нелинейные усредненные модели (рис. 4а–б, рис. 6а–б), находим для понижающего преобразователя:

для повышающего и инвертирующего преобразователей:

где для повышающего преобразователя γсх = 1, uсх =uвых.ср, для инвертирующего γсх = γ, uсх =uвх.ср +uвых.ср.
Пример. Оценим значения скорости diL.ср /dt и ускорения d2iL.ср /dt2 для корректора коэффициента мощности, выполненного на базе повышающего преобразователя при Uвх.m = √2 × 200 = 311 В; Pвх = 250 Вт; uвых.ср = 400 В; f = 105 Гц; L = 1 мГн; C = 450 мкФ [1]. Тогда, предполагая, что имеет место идеальное слежение средним значением тока iL.ср за входным напряжением, получаем:

требуемая скорость слежения в установившемся режиме:

Возможная в системе скорость слежения примерно равна:

где при значениях uвх.ср ≈ 0 значение γ ≈ 1, возможная скорость близка к нулю, по мере роста напряжения uвх.ср скорость возрастает, однако уменьшение γ ограничивает рост скорости. Например, при uвх.ср = 4 В, γ ≈ 1 имеем:
следовательно, система может обеспечить требуемую скорость изменения тока уже при возрастании входного напряжения до нескольких вольт.
Поскольку в начале каждого полупериода питающей сети должно происходить скачкообразное изменение скорости от –(diL.ср /dt)max до +(diL.ср /dt)max, то требуемое ускорение равно ∞, что физически невозможно. Поэтому возможное значение d 2iL.ср /dt2 должно быть как можно больше.
Учтем, что

где предположим, что управляющее напряжение в течение половины периода меняется по закону:
Тогда
uC.ср (dγ / dt) = (1/2)uC.срωc = = (1/2)400 × 2π × 50 = 6,28 × 104 В/с,
по второй формуле (38) найдем:
(d2iL.cр / dt2) ≈ (1 / 10–3) × (9,77 × 104 + 6,28 × 104) = 1,6 × 108 А/с2.
Определение параметров желаемой передаточной функции
При этом будем исходить из требуемой точности регулирования тока и заданного показателя колебательности M, равного максимуму АЧХ замкнутой системы [14].
Частотная характеристика разомкнутой импульсной системы в области низких частот (ω<2/T) получается из низкочастотной передаточной функции непрерывной части заменой p = jλ и делением на период T. Это соответствует усредненной модели импульсной системы (рис. 8б), где усреднение переменных происходит за время T. Здесь λ — псевдочастота, которая при ω<2/T примерно совпадает с обычной круговой частотой [14]. Под W0(p) и Wк (p) на рис. 8, 9 подразумеваются низкочастотные передаточные функции (для ω<2/T) неизменяемой части и корректирующего устройства. В усредненной модели предполагается, что изменения переменных g, x и e за время T малы и можно считать, что gср ≈ g, eср ≈ e и xср ≈ x.
На основании сказанного при анализе ошибок регулирования и построении частотных характеристик в области низких частот (λ<2/T) можно использовать усредненную модель системы (рис. 8б), пренебрегая влиянием малых постоянных времени (Ti<T/2).

Рис. 10. Построения частотных характеристик разомкнутого токового контура
На рис. 10 в качестве примера показаны построения частотных характеристик разомкнутого токового контура при определении вида и параметров последовательной корректирующей цепи в следящей системе регулирования тока с мгновенными импульсами, обеспечивающей максимальную скорость слежения ![]() max = 2,5 × 104 А/си максимальное ускорение слежения
max = 2,5 × 104 А/си максимальное ускорение слежения ![]() max = 5 × 107 А/с2 при максимально допустимой установившейся ошибке слежения emax = 0,01 А и показателе колебательности M=1,5. Период дискретизации T=10 мкс. Эти параметры примерно соответствуют корректору коэффициента мощности [1].
max = 5 × 107 А/с2 при максимально допустимой установившейся ошибке слежения emax = 0,01 А и показателе колебательности M=1,5. Период дискретизации T=10 мкс. Эти параметры примерно соответствуют корректору коэффициента мощности [1].
Передаточная функция нескорректированной непрерывной части системы определяется выражением (22), где T1 = 2×10–3 с; K0 = 40T . В передаточную функцию W0(p) включаются коэффициенты усиления силовой части, датчика тока и ШИМ.
Введены обозначения L0(ω)=20lg|W0(jω)| — ЛАЧХ неизменяемой части (желаемая ЛАЧХ проведена через так называемую контрольную точку на частоте ωэ);Lж (λ) — желаемая ЛАЧХ дискретной системы, которая при λ T совпадает с Lж (ω); Lк (ω) — ЛАЧХ последовательного корректирующего устройства (регулятор тока); λср — частота среза желаемой ЛАЧХ. На ФЧХ заштрихована запретная область; μmax—максимально возможный запас по фазе.

Рис. 11.
а) Схема последовательного корректирующего устройства;
б) структурная схема включения корректирующего устройства в замкнутую систему
На рис. 11а показана схема последовательного корректирующего устройства, реализованного на операционном усилителе. Токоизмерительный резистор (датчик тока) Rдт включен в цепь регулируемого тока iвых=x, задающий ток iз подается на неинвертирующий вход ОУ и замыкается через резистор R1. В связи с тем, что сопротивление R1 на несколько порядков больше Rдт, потенциал неинвертирующего входа ОУ можно вычислить по формуле:
где gт = R1iз/Rдт — задающий сигнал замкнутой следящей системы регулирования тока.
Заключение
- Дано сравнение предлагаемых структурных моделей силовых частей импульсных преобразователей с известными из американской литературы схемными моделями. Показано, что структурные модели удобнее при синтезе систем управления, поскольку они полностью соответствуют методам исследования и синтеза, разработанным в теории автоматического управления.
- Показано, как можно использовать предложенные модели при синтезе частотным методом двухконтурных систем управления импульсными преобразователями.
- Обобщенное изложение материала для всех трех основных схем импульсных преобразователей существенно повышает объем предлагаемой информации и, что очень ценно, облегчает сравнение их характеристик, но несколько затрудняет восприятие материала читателем.
- Todd P. C. UC3854 Controlled Power Factor Correction Circuit Design // Product and applications. Handbook 1995–1996 / Integrated Circuits Unitrode.
- Kocher M. I., Steiderwald R. L. An AC-to-DC converter with high quality input waveforms // IEEE Trans. on Ind. Appl. New York, 1983, V. IA-19. № 4. Pр. 586–599.
- Dixon L. Average Current Mode Control of Switching Power Supplies. Product and applications. Handbook / Integrated Circuits Unitrode. Pр. 10-398–10-411.
- Браун М. Источники питания. Расчет и конструирование / Пер. с англ. Киев: МК-Пресс, 2005.
- Севернс Р., Блум Г. Импульсные преобразователи постоянного напряжения для систем вторичного электропитания / Пер. с англ. М.: Энергоатомиздат, 1988.
- Четти П. Проектирование ключевых источников электропитания. М.: Энергоатомиздат, 1990.
- Hsu S., Brown A., Rensink L., Middlebrook R. D. Modeling and Analysis of Switching DC-to-DC Converters in Constant-Frequency CurrentProgrammed Mode // IEEE PESC Proceedings. 1979.
- Белов Г. А. Импульсные модели и устойчивость токовых контуров импульсных преобразователей с ПИ-регулятором тока дросселя // Практическая силовая электроника, 2006. № 22.
- Белов Г. А. Динамика импульсных преобразователей. Чебоксары: изд-во Чуваш. ун-та, 2001.
- Белов Г. А. Синтез системы управления широтно-импульсным корректором коэффициента мощности // Электротехника. 2006. № 10.
- Белов Г. А. Структурные модели и исследование динамики импульсных преобразователей // Электричество, 2008. № 4.
- Modelling, analysis and compensation of the current-mode converter // Product and applications. Handbook 1995–1996 / Integrated Circuits Unitrode. P. 10-51–10-56.
- Душин С. Е., Зотов Н.С., Имаев Д. Х. и др. Теория автоматического управления: Учеб. для вузов / Под ред. В. Б. Яковлева. М.: Высшая школа, 2005.
- Бесекерский В. А. Цифровые автоматические системы. М.: Наука, 1976.
- Иванов В. А., Ющенко А. С. Теория дискретных систем автоматического управления. М.: Наука, 1983.
 4 декабря, 2023
4 декабря, 2023 26 августа, 2021
26 августа, 2021 27 апреля, 2022
27 апреля, 2022