
Проектирование недорогих многовыходных DC/DC-преобразователей — стабилизаторов напряжения.
Часть 2
Диоды
Рециркуляционный диод D1, через который при выключении ключа происходит замыкание обратного тока катушки индуктивности, и выходной выпрямительный диод D2 для вторичного выхода выбираются путем вычисления их среднего тока с умножением на прямое напряжение, что позволяет определить величину рассеиваемой на диодах мощности. После этого, на основании оценки допустимого увеличения температуры вследствие наличия теплового сопротивления, диоды выбираются по варианту исполнения корпуса. Предпочтение здесь следует отдать диодам Шоттки. Причина такого выбора кроется в их более низком прямом падении напряжения и почти нулевом заряде обратного восстановления. По сравнению с обычными кремниевыми диодами, две эти объединенные вместе особенности делают диоды Шоттки более эффективными и с меньшей генерацией помех. В целях обеспечения надежности преобразователя и создания некоторого технологического запаса, учитывая возможные помехи и переходные процессы, необходимо выбирать диоды, у которых обратное напряжение, по крайней мере, на 20% выше самого высокого из возможных напряжений в системе. Это напряжение для обычных и многовыходных понижающих преобразователей на основе магнитосвязанных катушек индуктивности равно VIN-MAX. Итак, учитывая запас в 20%, при входном напряжении 14 В мы должны использовать диоды с обратным напряжением не менее 16,8 В, следовательно, диоды, рассчитанные на 20 В или выше, будут здесь вполне уместны. Рассеиваемая на диодах мощность определяется следующими уравнениями:
![]()
![]()
Что касается корпуса диодов, то, с экономической точки зрения, для обоих диодов наилучшим образом подойдет исполнение в стандартном корпусе SMA с типичным тепловым сопротивлением 95 °C/Вт. Диоды в таких корпусах, имеющие рабочее обратное напряжение, равное 20 В, широко доступны и выпускаются различными производителями.
Компенсация петли обратной связи стабилизации напряжения
По нескольким причинам для решения проблемы стабилизации выходного напряжения понижающих DC/DC-преобразователей на магнитосвязанных катушках индуктивности оптимальным вариантом является выбор стабилизации по пиковому току — режим PCM (Peak Current Mode). При правильной реализации данный метод управления упрощает схему компенсации усилителя ошибки. Как следует из самого названия, в режиме PCM управление осуществляется по пиковому току в катушке индуктивности (в данном случае в ее первичной обмотке); естественно, это делается в каждом цикле переключения. Добавление второй обмотки и еще одной нагрузки на понижающий DC/DC-преобразователь изменяет передаточную функцию его силового каскада, состоящего из модулятора рабочего цикла и выходного фильтра. Однако при этом основная цель компенсации контура управления остается неизменной. Компенсация должна обеспечивать высокий коэффициент усиления на постоянном токе (для уменьшения погрешности установки основного выходного напряжения), с высокой пропускной способностью (для быстрого реагирования на переходные процессы, связанные с изменением нагрузки) и высоким запасом по фазе (для устойчивой реакции на сброс/наброс нагрузки и переходные процессы по цепи питания), не допускающей возникновения паразитной генерации. Для компенсации контуров управления имеется много схемотехнических и архитектурных подходов, но в данной статье мы сфокусируем свое внимание на основном методе, который хоть и является консервативным, но обеспечивает высокую стабильность контура регулирования.
Описание особенности цепи регулирования силового каскада
Ниже приведены основные базовые параметры и их значения, которые необходимы для разработки линейной малосигнальной модели силового каскада в сочетании с магнитосвязанной 1:1 индуктивностью для проектируемого понижающего импульсного стабилизатора:
- минимальное входное напряжение VIN-MIN = 10 В;
- номинальное выходное напряжение VOUT = 5,0 В;
- максимально допустимый ток нагрузки IO = IO1-MAX+IO2-MAX = 0,5+0,2 = 0,7 A;
- частота коммутации fSW = 500 кГц;
- индуктивность катушки L1 = 47 мкГн;
- сопротивление силового каскада RL = RDSON+DCR = 200+600 = 800 мОм, здесь RDSON — это сопротивление силового канала МОП-транзистора в открытом состоянии, DCR — сопротивление по постоянному току обмотки катушки L1;
- суммарная емкость выходных конденсаторов CO = CO1+CO2 = 220+16 = 236 мкФ;
- ESR выходных конденсаторов RC = 40 мОм;
- сопротивление датчика тока RSN = 167 мОм;
- усиление по току GI = 1;
- опорное напряжение VFB = 0,8 В;
- максимальный рабочий цикл DMAX = 0,52;
- сопротивление нагрузки RO = VOUT / IO;
- компенсация наклона VM = 0,417 В.
Компенсация наклона, или компенсация крутизны (slope compensation) необходима для корректировки погрешности между током в момент времени, когда определено его пиковое значение, и средним значением этого тока. Без этой дополнительной компенсации импульсным преобразователям в режиме PCM присуща субгармоническая бифуркация, или нестабильность, вызванная раздваиванием, что приводит к возникновению субгармонических колебаний для рабочих циклов 50% и выше. Поскольку пульсирующий ток в катушке индуктивности в понижающих преобразователях с магнитосвязанными катушками выше, чем в обычных понижающих преобразователях, то им требуется более высокая компенсация наклона.
К сожалению, очень немногие микросхемы управляющих контроллеров DC/DC-преобразователей позволяют отрегулировать и настроить компенсацию наклона, следовательно, нам, чтобы заранее предвидеть возможные проблемы, очень важно сделать оценку и определить идеальную компенсацию наклона.
Для режима PCM идеальная компенсация наклона равна наклону тока в течение времени выключения силового полевого транзистора. Для простоты предполагается, что сигнал имеет треугольную форму, но имеет одно и то же значение от пика до пика в качестве фактически трапецеидальной волны DiP. Идеальная компенсация наклона в этом случае определяется как:
![]()
Фиксированное значение компенсации наклона VM, равное 0,417 В, используемое в выбранной нами микросхеме контроллера DC/DC-преобразователя TPS54160, превышает идеальное, что устраняет опасность возникновения субгармонических колебаний в этом примере. Однако следует отметить, что уровень VM не может быть слишком высоким без отрицательных последствий. Если его значение гораздо больше, чем это определяется токовым сенсором, то режим работы преобразователя становится больше похожим на режим стабилизации напряжения, и в этом случае он, чтобы обеспечить достаточный запас по фазе, требует более тщательной компенсации усилителя ошибки.
Эффективное значение индуктивности L1EFF используется для коррекции разности между наклоном треугольной формы тока в катушке индуктивности в стандартном понижающем преобразователе и трапециевидной формой тока в системе понижающего преобразователя с магнитосвязанными катушками:

Коэффициент AFB дает нам снижение коэффициента усиления в дБ, которое является следствием деления выходного напряжения резистивным делителем. А параметр KM — это коэффициент усиления модулятора, представляющий баланс между током, который определен токовым сенсором (первое слагаемое в знаменателе), и компенсацией наклона (второе слагаемое в знаменателе):


Теперь коэффициент усиления силового каскада по постоянному току APS может быть определен следующим образом:


Частотно-зависимыми составляющими передаточной функции силового каскада являются полюс, связанный с нагрузкой, — w C, нуль ESR — w Z, а также двухполюсные производные от функции, учитывающей эффект дискретизации тока катушки индуктивности с угловой частотой w L:

Передаточная функция управления относительно выхода теперь может быть решена с помощью преобразования Лапласа:

Частоты полюсов и нуля в герцах рассчитываются путем деления каждой из составляющих в виде циклической частоты w, рассчитанной ранее в радианах/с, на 2p:

Удобный интуитивный способ выбора усиления и фазы отклика, необходимых для усилителя ошибки, обеспечивает графическое представление усиления и фазы. Графики, описывающие зависимость усиления GPS(s) и фазочастотную характеристику (ФЧХ) силового каскада, приведены на рис. 6.

Рис. 6. Графики усиления (АЧХ) и ФЧХ выходного каскада
С графической точки зрения, цель введения компенсации в усилителе ошибки состоит в том, чтобы получить полный коэффициент усиления контура управления, который начинается с максимального и спадает под наклоном минус 20 дБ/декада, и ширину полосы или системную частоту среза системы автоматического регулирования (crossover frequency), которая определяется как точка, в которой коэффициент усиления контура равен 0 дБ. В общем, пропускная способность устанавливается как можно шире, но при этом, для достижения устойчивости петли регулирования, должен сохраняться достаточно большой запас по фазе. Запас по фазе определяется как разность между ФЧХ петли регулирования, когда коэффициент усиления равен 0 дБ, и минус 360° — точка, в которой отрицательная обратная связь становится положительной, это и определяет границу устойчивости контура управления. На практике, если устойчивость нарушена, мы имеем неустойчивый рабочий цикл и колебания выходного напряжения. Минимальный запас по фазе, равный 45°, обеспечит переходную характеристику системы практически без перерегулирования или колебаний, но, в то же время, он позволяет иметь пропускную способность настолько широкой, насколько это возможно. Обычно она составляет 1/5 от частоты коммутации. Теоретически пропускная способность может достигать до 1/2 от частоты переключения, но на практике 1/5 — это достаточно хороший выбор.
В этом примере будет использоваться коррекция типа II, состоящая из полюса на частоте 0 Гц, что позволит обеспечить высокий коэффициент усиления на постоянном токе и на низких частотах, одного полюса, частота которого может быть установлена произвольно, и ноля, частота которого также может быть установлена по желанию. Хорошая отправная точка для синтеза цепи компенсации — это установить частоту fZ1 компенсации нуля, равную частоте полюса нагрузки fC, и установить частоту fP1 компенсации полюса равной частоте нуля fZ, учитывающей ESR. Таким образом, такая компенсация полюса и ноля эффективно устранит ноль и полюс силового каскада, оставив только полюс в начале координат. Это обеспечит высокий коэффициент усиления, а непрерывный спад АЧХ с наклоном –20 дБ/декада будет поддерживаться вплоть до удвоенной частоты полюса дискретизации fL.
Оставшаяся переменная определяется как коэффициент усиления компенсации в промежутке между fZ1 и fP1, который в англоязычной технической литературе часто называют «усилением средней полосы» (mid-band gain или midband gain). Правильным подходом для его определения будет подать сигнал на общий контур управления так, чтобы пересечь 0 дБ, и таким образом определить пропускную способность в этой плоской области усиления. Это может быть сделано путем определения усиления силового каскада на требуемой системной частоте среза с помощью установки усиления в цепи компенсации, которое будет равно по величине, но противоположно по знаку; тем самым в этой точке мы сводим к нулю усиление по всей ширине полосы пропускания.
В контроллере TPS54160 используется режим управления по току, а в качестве усилителя сигнала ошибки — транскондуктансный усилитель (transconductance error amplifier), то есть усилитель тока, управляемый напряжением. Это позволяет упростить схему компенсации и обеспечивает возможность поциклового ограничения тока с быстрым откликом на изменения входного напряжения и тока нагрузки. Усилитель ошибки имеет коэффициент усиления 97 мкСм и с двумя внешними конденсаторами и одним внешним резистором позволяет установить частоты полюсов, ноля и усиление в средней полосе частот. На рис. 7 показан усилитель ошибки и его внешние компоненты.

Рис. 7. Усилитель ошибки, выполненный на базе усилителя тока, управляемого напряжением
Данные по этому усилителю ошибки могут быть взяты из спецификации (DdataSheet) выбранной микросхемы управляющего контроллера; так, для контроллера TPS54160, как уже отмечалось выше, усиление gM равно 97 мкСм. А усиление среднего диапазона, частоты нулей и полюсов могут быть вычислены следующим образом:
![]()


Как показано на рис. 6, коэффициент усиления GPS(S) на частоте, выбранной с большим технологическим запасом, а именно равной 1/10 частоты коммутации, или 50 кГц, составляет около –14 дБ. Здесь есть один момент, о котором иногда забывают: уменьшение коэффициента усиления по причине наличия в цепи обратной связи резистивного делителя, коэффициент передачи AFB которого рассчитывается по формуле (25). Это усиление, а вернее, уменьшение сигнала, может быть просуммировано с усилением силового каскада или с усилением усилителя ошибки — это не имеет никакого значения, но только тогда, когда петля обратной связи будет замкнута. В рассматриваемом примере проектирования DC/DC-преобразователя предполагается, что усиление AFB является частью передаточной функции усилителя ошибки, и, поскольку оно не является частотозависимым, то прямо влияет на усиление средней полосы:

Теперь, когда нам известен коэффициент усиления в середине полосы пропускания, могут быть вычислены номиналы элементов R1, C1 и C2:

Ближайший стандартный номинал резистора с допуском 1% — 316 кОм, ближайшие стандартные номиналы конденсаторов с допуском 10% — это 1,8 нФ и 27 пФ соответственно. Именно эти номиналы элементов подставляются и используются при расчете передаточной функции цепи компенсации:

На рис. 8 показаны АЧХ и ФЧХ усилителя ошибки.

Рис. 8. Графики усиления (АЧХ) и ФЧХ усилителя ошибки
Заключительный шаг заключается в том, чтобы закрыть петлю обратной связи, что осуществляется путем умножения передаточных функций силового каскада и усилителя ошибки. Окончательный график усиления показывает увеличение полосы пропускания и суммарную ФЧХ с достаточным запасом по фазе.
Как показывают графики, приведенные на рис. 9, фактическая полоса пропускания составляет 20 кГц, а запас по фазе — 79°, что указывает на несколько замедленный, но очень стабильный контур управления. Причина, по которой полоса пропускания и запас по фазе не совпадают с ожидаемыми результатами, полученными на основе идеальной модели, связана с более низкой частотой компенсации полюса. Это характерно для преобразователей, использующих выходные конденсаторы с высокими значениями ESR, такие как алюминиевые электролитические и танталовые. Если это критично и необходимо, то частота компенсации полюса может быть увеличена вплоть до 1/2 частоты переключения. На самом деле для преобразователей с чисто керамическими выходными конденсаторами частота нуля ESR, как правило, лежит в диапазоне мегагерц, и в таких случаях рекомендуемая частота компенсации полюса может быть принята равной 1/2 от частоты переключения. Увеличение коэффициента средней полосы и/или увеличение частоты компенсации полюса увеличат полосу пропускания контура управления, но также при этом уменьшат и запас по фазе. Для достижения идеального баланса для схемы компенсации может быть выполнено несколько итераций путем приращения полосы пропускания, но только с обязательным мониторингом запаса по фазе. Итерации выполняются до тех пор, пока запас по фазе не станет равным 45°, при этом будет достигнута максимальная рекомендуемая пропускная способность при достаточной устойчивости по фазе.

Рис. 9. График усиления (АЧХ) и ФЧХ петли регулирования
Входной LC-фильтр с демпфированием
Понижающие, понижающе-повышающие и обратноходовые преобразователи — это три основные топологии, которые отбирают от источника питания прерывистый ток. Даже при использовании высококачественных входных конденсаторов, которые могут работать на высоких импульсных токах, в таком источнике питания неизбежно будет иметь место некоторое количество переменной составляющей входного тока, результатом чего является появление кондуктивных электромагнитных помех на входных линиях подключения. Чем длиннее выводы, проводники на печатной плате и провода подключения, которыми подключаются входные цепи DC/DC-преобразователей с высоким уровнем пульсаций входного тока, тем больше вероятность того, что эти кондуктивные помехи также приведут и к излучению электромагнитных помех. Это является следствием того, что проводники с таким током выступают в роли антенны. Хорошим решением для уменьшения кондуктивных электромагнитных помех является фильтрация пульсаций входного тока прежде, чем они смогут «загрязнять» линии подключения входа и вызвать излучение электромагнитных помех. Для этой цели можно использовать входной LC-фильтр, который размещают в непосредственной близости с входом DC/DC-преобразователя.
Не каждая лаборатория имеет доступ к специализированному оборудованию для измерения и испытаний кондуктивных электромагнитных помех, не говоря уже о специальных антеннах и безэховых камерах, которые необходимы для измерения электромагнитного излучения. Следующая процедура расчета основана на корреляции сигналов токов во временной области. Это позволяет прогнозировать и измерять обычным осциллографом кондуктивные дифференциальные помехи в частотной области.
Ожидаемая амплитуда напряжения помех
Следующее уравнение можно использовать для оценки амплитуды первой гармоники помех для кондуктивного дифференциального шума, которая рассчитывается на основе формы входного тока:
На рис. 10 показан входной ток для рассматриваемого примера в условиях максимальной нагрузки и минимального входного напряжения, т. е. в худшем сочетании с точки зрения генерации электромагнитных помех.

Рис. 10. Напряжение на силовом ключе (желтый), DvIN (составляющая напряжения переменного тока, голубой), входной ток IIN (лиловый).
Условия измерения: VIN = 10 В, IO1 = 500 мА, IO2 = 180 мА.
Среднее значение тока входного сигнала, или средняя высота пьедестала трапеции формы входного тока, может быть вычислено по формуле
где

Максимальный рабочий цикл был определен ранее как 0,52 по формуле (1), так что средний ток IIN-AVG составит 0,39 / 0,52 = 0,75 А. Общая входная емкость CIN была определена как 7 мкФ (прим. перев.: здесь необходимо брать минимальную емкость с учетом допуска и температуры, то есть минимальную из возможных). Таким образом, ожидаемая первая гармоника помех будет равна:

Предельное значение для среднего уровня синфазных помех и шумов приведено во многих стандартах, связанных с проблемами электромагнитной совместимости. Например, стандартом IEC55022 установлено, что в диапазоне от 500 кГц их максимальный уровень не должен превышать 46 дБмкВ. Следовательно, нам требуется принять определенные меры для ослабления шума на величину, равную разнице между ожидаемой расчетной A1ST и данным ограничением, установленным стандартом. Для рассматриваемого нами примера требуется обеспечить дополнительное подавление помех не менее чем на величину, равную ATT = 86,6–46 = 41 дБмкВ.
Выбор номинальных значений L и C
При разработке входного фильтра прежде всего нам необходимо произвольно выбрать или катушку индуктивности, или конденсатор. В рассматриваемом примере мы сначала выберем катушку индуктивности. Номинальное значение индуктивности в пределах 1–10 мкГн обеспечивает нам хороший компромисс между размером, стоимостью и результирующей резонансной частотой входного LC-фильтра. Номинальный среднеквадратичный рабочий ток катушки индуктивности должен быть больше, чем входной ток IIN преобразователя, а ее допустимый пиковый ток должен быть выше, чем сумма среднего тока и половина пульсации переменного тока:

Катушка индуктивности от компании Würth Elektronik серии WE-TPC 2828 под номером 744 025 002 представляет собой экранированный дроссель индуктивностью 2,2 мкГн с небольшой занимаемой площадью (всего 2,8×2,8×2,8 мм) с DCR, равным 60 мОм, и рейтингами по току IRMS = 1,8 А и ISAT = 2,4 А, что очень хорошо подходит для рассматриваемого примера. С выбранной индуктивностью мы можем осуществить выбор конденсатора. Для выбора требуемой емкости имеются два уравнения. Первое основано на резонансной частоте фильтра, которая должна быть близкой к 1/10 частоты переключения или ниже этого значения:

Необходимо учитывать, что вычисление по формуле (41), может дать отрицательный результат. Это будет означать, что при выбранной номинальной величине индуктивности нам не удастся достичь резонансной частоты фильтра в 10 раз меньшей, чем частота переключения. Если необходимо, то номинал индуктивности может быть увеличен, хотя это приведет к снижению КПД за счет более высокого уровня DCR и более высоких потерь в сердечнике, которые характерны для более высоких значений индуктивности. Кроме того, это может отразиться и на габаритных размерах решения. Однако установка резонансной частоты в 10 раз ниже частоты переключения является ориентиром, а не жестко установленным требованием.
Второе уравнение представляет собой жесткий предел минимального значения емкости, которая необходима для того, чтобы пульсации напряжения на входе преобразователя находились ниже предела, установленного значением АТТ:

Разработчик должен выбрать конденсатор с номинальной емкостью, превышающей бóльшее из двух рассчитанных значений — CF MIN1 и CF-MIN2. Что касается типа конденсатора, то лучшим выбором в данном случае является многослойный керамический конденсатор. Однако при использовании таких конденсаторов необходимо в обязательном порядке учитывать уменьшение их емкости из-за воздействия постоянного напряжения. В зависимости от размера корпуса и рабочего напряжения, скорее всего, здесь потребуется два или более параллельно включенных конденсаторов номинальной емкостью в 10 мкФ. Это необходимо, чтобы обеспечить конечное значение емкости не менее чем 14 мкФ. Однако перед тем как выбрать конечное значение емкости CF, необходимо учитывать такой момент, как оптимальное демпфирование входного фильтра.
Демпфирование фильтра
Если питание импульсного преобразователя осуществляется через LC-фильтр, то существует потенциальная угроза возникновения паразитных колебаний (их часто называют «звон», а в англ. терминологии — ringing или power supply interaction), что связано с соотношением выходного импеданса фильтра и входного сопротивления преобразователя. Правильно спроектированные преобразователи обеспечивают высокую эффективность по всему диапазону входного напряжения. При этом одним из важных факторов, оказывающих влияние на КПД, является то, что при повышении входного напряжения входной ток уменьшается, и наоборот. В результате мы имеем эффективный отрицательный входной импеданс ZIN. Если |–ZIN | меньше или равен ZOUT нашего LC-фильтра, то входная цепь, скорее всего, начнет осциллировать, что является паразитным явлением.
Здесь необходимо учитывать, что, даже при отсутствии входного дросселя, на входе всегда присутствует некоторая паразитная индуктивность, и в случае, если по входу преобразователя использовать только MLCC входные конденсаторы с их очень низким уровнем ESR, вероятность возникновения паразитных колебаний очень высока и вполне реальна. В этом примере мы используем дискретный дроссель, индуктивность и DCR которого нам известны. С помощью этих величин мы можем рассчитать значение емкости демпфирующего конденсатора CD, который можно установить параллельно с CIN, как это показано на рис. 11.

Рис. 11. LC-фильтр с демпфирующим конденсатором
Кроме того, что демпфирующий конденсатор CD подавляет паразитную генерацию, он уменьшает пульсации напряжения на входе, снижает амплитуду гармоники A1ST и увеличивает уровень подавления ATT, а также, в свою очередь, уменьшает емкость CF, необходимую для реализации фильтра. Следующие два уравнения определяют минимальную емкость и минимальное ESR, которые необходимы для того, чтобы конденсатор CD обеспечил критическое демпфирование фильтра, образованного индуктивностью LF и емкостью CIN:
![]()

Полученное отрицательное значение ESR будет означать, что собственное сопротивление катушки индуктивности фильтра по постоянному току уже является достаточным для обеспечения должного демпфирования паразитных колебаний. Типичный выбор типа конденсатора, который наиболее подходит для использования в качестве демпфирующего, — алюминиевый электролитический конденсатор. Такие конденсаторы для поверхностного монтажа емкостью 33 мкФ, рассчитанные на рабочее напряжение 16 или 25 В, по разумной цене предлагают самые различные производители. Более того, для демпфирования, как правило, полезен конденсатор с «плохим», то есть высоким значением ESR, что в данном случае будет не вредно, а полезно. Нами выбран алюминиевый электролитический конденсатор для поверхностного монтажа емкостью 33 мкФ производства компании Panasonic. Он имеет рабочее напряжение 25 В и ESR, равное 0,34 Ом, доступен в компактном цилиндрическом 6,3-мм корпусе или в корпусе D8 с радиально расположенными выводами.
Перерасчет емкости CF
Поскольку общая емкость CIN теперь равна 7 мкФ+33 мкФ, то для уточнения окончательных параметров фильтра нам потребуется еще одна итерация. Для упрощения задачи можно просто констатировать, что окончательное необходимое нам значение CF составит 5,2 мкФ. При этом нам потребуется еще один MLCC-конденсатор с рабочим напряжением 25 В и номинальной емкостью 10 мкФ, т. е. будет использоваться конденсатор, идентичный CIN. Это связано с необходимостью учитывать воздействие приложенного напряжения постоянного тока, в результате чего емкость этого конденсатора будет на уровне 7 мкФ.
Заключение
Использование магнитосвязанных индуктивностей может обеспечить простое решение в виде дополнительного второго выходного напряжения без использования еще одного импульсного DC/DC-преобразователя, но отклонение этого вторичного выходного напряжения и порог перехода преобразователя в режим DCM трудно предсказать с использованием чисто математических выражений. Для получения результатов, имеющих практическую ценность, конструкция понижающего DC/DC-преобразователя с использованием 1:1 магнитосвязанных катушек индуктивности должна быть тщательно проверена в лаборатории. Это касается ее работы во всем диапазоне входных напряжений, нагрузок и температур. В большинстве случаев отклонение напряжения вторичного выхода является слишком большим, как и его зависимость от изменения входного напряжения и тока нагрузки, что может ограничить его непосредственное применение. Решить проблемы может использование дополнительного линейного стабилизатора, который обеспечит второе напряжение с высокой точностью и стабильностью.

Рис. 12. Осциллограммы в установившемся режиме. Условия измерения: IO1 = 500 мА, IO2 = 100 мА.
Канал 1 — напряжение первичной обмотки; канал
канал 2 — напряжение на первом выходе VOUT1 (составляющая напряжения переменного тока);
канал 3 — напряжение вторичной обмотки;
канал 4 — напряжение на втором выходе VOUT2 (составляющая напряжения переменного тока)
На рис. 12, 13, 14, 15 и 16 представлены осциллограммы, иллюстрирующие работу двухвыходного преобразователя, графики зависимости его КПД от тока нагрузки по его выходам и практическая электрическая принципиальная схема такого устройства, спроектированного по рассмотренной в данной статье методике.

Рис. 13. Реакция на сброс/наброс нагрузки по первичному выходу. Условия измерения: IO1 изменяется от 200 до 500 мА, IO2 = 100 мА.
Канал 2 — напряжение на первом выходе VOUT1 (составляющая напряжения переменного тока);
канал 3 — напряжение тока первичной обмотки IO1;
канал 4 — напряжение на втором выходе VOUT2 (составляющая напряжения переменного тока)

Рис. 14. Реакция на сброс/наброс нагрузки по вторичному выходу. Условия измерения: IO1 = 500 мА, IO2 изменяется от 50 до 100 мА.
Канал 2 — напряжение на первом выходе VOUT1 (составляющая напряжения переменного тока);
канал 3 — напряжение ток первичной обмотки IO2;
канал 4 — напряжение на втором выходе VOUT2 (составляющая напряжения переменного тока)
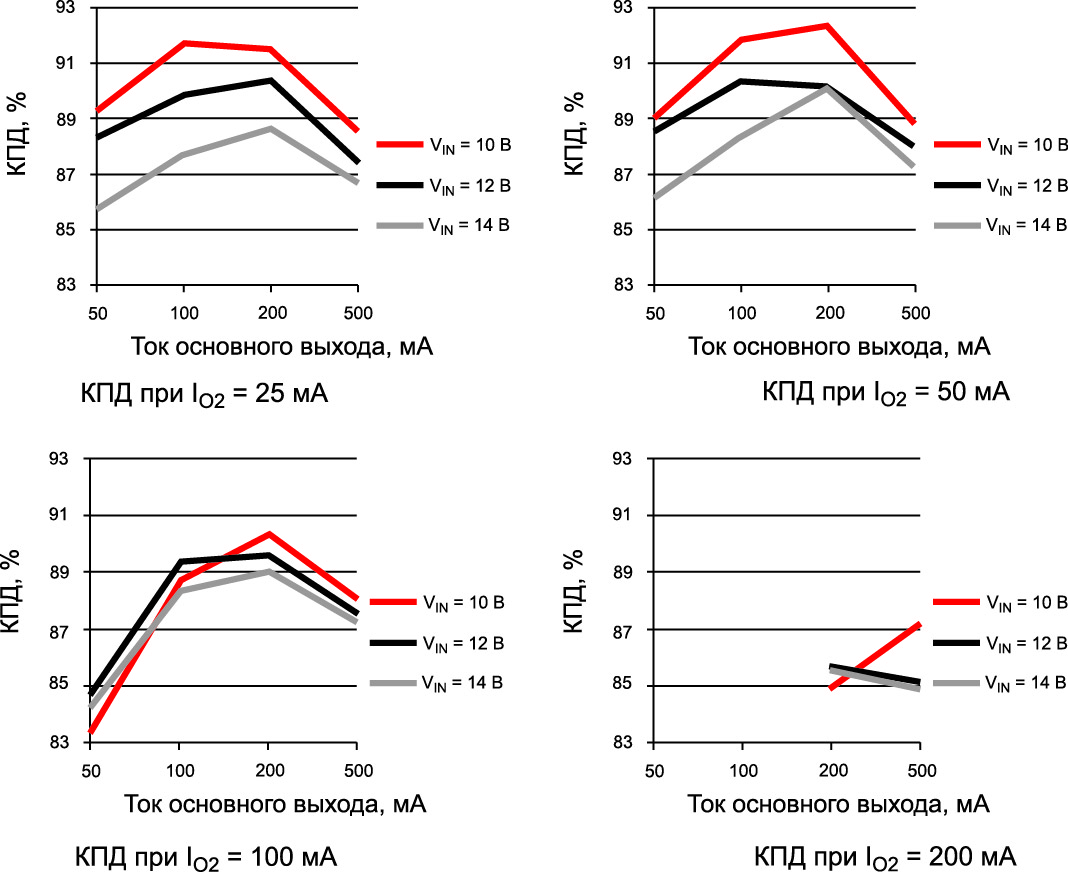
Рис. 15. Зависимость КПД двухвыходного преобразователя от тока нагрузки по выходам

Рис. 16. Схема электрическая принципиальная двухвыходного преобразователя, спроектированного на основании рассмотренной методики
|
Условное обозначение |
Кол-во |
Тип элемента |
Описание |
Корпус/размер/ типоразмер |
Обозначение |
Параметр |
Изготовитель |
||
|
1 |
2 |
3 |
|||||||
|
C10 |
1 |
Конденсатор |
SMT танталовый электролитический корпус D |
D-Case |
10TPB220 M |
220 мкФ |
10 В |
4 мОм |
SANYO |
|
C2 |
1 |
Конденсатор |
SMT алюминиевый электролитический корпус D8 |
Radial D8 |
EEE-FK1E330P |
33 мкФ |
25 В |
0,34 Ом |
Panasonic |
|
CN1, CN2, CN3 |
3 |
Клеммы |
3,81мм (провод–плата) |
7,627,48,5 мм |
69121431 0002 |
300 В |
10 A |
3,81 мм |
Wu..rth Elektronik |
|
R1, R6, R7 |
3 |
Резистор |
Тонкопленочный |
0603 |
CRCW060 31002FK |
10 кОм |
0,1 Вт |
75 В |
Вishay-Dale |
|
R2 |
1 |
Резистор |
Тонкопленочный |
0603 |
CRCW060 31621FK |
1,62 кОм |
0,1 Вт |
75 В |
Vishay-Dale |
|
R3 |
1 |
Резистор |
Тонкопленочный |
0603 |
CRCW060 32553FK |
255 кОм |
0,1 Вт |
75 В |
Vishay-Dale |
|
R4 |
1 |
Резистор |
Тонкопленочный |
0603 |
CRCW060 33163FK |
316 кОм |
0,1 Вт |
75 В |
Vishay-Dale |
|
R5 |
1 |
Резистор |
Тонкопленочный |
0805 |
CRCW080 51001FK |
1 кОм |
0,125 Вт |
150 В |
Vishay-Dale |
|
R8 |
1 |
Резистор |
Тонкопленочный |
0603 |
CRCW060 31911FK |
1,91 кОм |
0,1 Вт |
75 В |
Vishay-Dale |
|
C1, C3 |
2 |
Конденсатор |
MLCC |
1210 |
C3225X5R 1E106M |
10 мкФ |
25 В |
X5R |
TDK |
|
C4, C5, C6, C11 |
4 |
Конденсатор |
MLCC |
0603 |
C1608X7R 1E104M |
100 нФ |
25 В |
X7R |
TDK |
|
C7 |
1 |
Конденсатор |
MLCC |
0603 |
C1608CO G1H182J |
1,8 нФ |
25 В |
X5R |
TDK |
|
C8 |
1 |
Конденсатор |
MLCC |
0603 |
C1608CO G1H270J |
27 пФ |
25 В |
X5R |
TDK |
|
C9 |
1 |
Конденсатор |
MLCC |
1210 |
C3225X5R 1A226M |
22 мкФ |
10 В |
X5R |
TDK |
|
D1, D2 |
2 |
Диод Шоттки |
SMA (DO-214AC) |
SMA |
B120-13-F |
20 В |
1 A |
0,5В |
Diodes Inc |
|
L1 |
1 |
Индуктивность |
Экранированная, на шпульке |
2,82,82,8 мм |
744025002 |
2,2 мкГн |
1,8 A |
60 мОм |
Wu..rth Elektronik |
|
L2 |
1 |
Индуктивность |
Экранированная, двухобмоточная 1:1 |
7,37,34 мм |
744878470 |
47 мкГн |
1 A |
0,6 Ом |
Wu..rth Elektronik |
|
U1 |
1 |
Микросхема |
Контроллер несинхронного импульсного |
eMSOP-10 |
TPS54160 DGQ |
|
|
|
Texas Instruments |
 7 марта, 2013
7 марта, 2013 5 октября, 2007
5 октября, 2007 19 сентября, 2007
19 сентября, 2007