
Линеаризованные дискретные структурные динамические модели импульсных ППН при модуляции момента выключения силового транзистора
При обосновании линеаризованных моделей импульсных ППН будем исходить из обоснованных в [4] нелинейных моделей, представленных на рис. 1.

Рис. 1. Нелинейные дискретные структурные динамические модели силовых частей импульсных ППН в РПТ:
а) понижающего;
б) повышающего;
в) инвертирующего
Используется общий метод линеаризации нелинейных систем автоматического управления в окрестности некоторого установившегося режима работы [5]. При этом предполагается, что на систему, работавшую в установившемся режиме, извне воздействует малое возмущение (или несколько малых возмущений). В качестве возмущения может служить также изменение начальных условий для описывающих систему дифференциальных уравнений.
Линеаризация нелинейной дискретной модели (рис. 1а) иллюстрируется рис. 2, где в верхней части сплошными линиями показаны кривые сигналов iL, uвых, u*вых, uвх, u*вх, uд.пр, u*д.пр, действующих в нелинейной модели понижающего ППН в установившемся режиме, а штриховыми линиями — кривые этих же сигналов в возмущенном режиме, обозначенные как iL+DiL, uвых+Duвых,u*вых+Du*вых, uвх+Duвх, u*вх+Du*вх, u*д.пр+Du*д.пр. Предполагается, что сигнал uд.пр(t) при переходе к возмущенному режиму не меняется. Кривые возмущенного режима должны мало отличаться от соответствующих кривых установившегося режима, в остальном их вид произволен.

Рис. 2. Временные диаграммы, поясняющие использование общего метода линеаризации систем к нелинейной импульсной модели понижающего ППН в РПТ (звездочкой обозначены сигналы на выходах ключей)
В нижней части рис. 2 показаны приблизительно кривые сигналов DiL, Duвых, Du*вых, Duвх, Du*вх и Du*д.пр, получаемые вычитанием кривых установившегося (стационарного) режима из соответствующих кривых возмущенного режима. Эти сигналы называются вариациями соответствующих сигналов установившегося режима и, в отличие от последних, обозначаются дополнительным символом «D» [5].
Анализируя кривые вариаций сигналов на рис. 2, видим, что на вход звена G(p) модели понижающего ППН (рис. 1а) на каждом периоде Tподаются шесть элементарных импульсов:
- импульс конечной высоты uвых(t1+tс)+Duвых(t1+tс) и малой длительности |Dt1+Dtс|, действующий в момент t1+tс, полярность которого с учетом инвертирования сигнала u*вых в суммирующем узле противоположна знаку приращения Dt1+Dtс;
- импульс малой переменной высоты Duвых(t) и конечной длительности t1+tс, действующий на интервале t1+tс, полярность которого с учетом инвертирования в суммирующем узле совпадает со знаком сигнала Duвых(t);
- импульс конечной высоты uвх(t1)+Duвх(t1) (в общем случае напряжение uвх в стационарном режиме является переменным, например за счет пульсаций) и малой длительности |Dt1|, действующий в момент t1, полярность которого совпадает со знаком приращения Dt1;
- импульс малой переменной высоты Duвх(t) и конечной длительности t1, действующий на интервале t1, полярность которого совпадает со знаком вариации Duвх(t);
- импульс конечной высоты uд.пр и малой длительности |Dt1| (предполагаем, что прямое падение напряжения на открытом силовом диоде в установившемся и возмущенном режимах одинаково), действующий в момент t1, полярность которого с учетом инвертирования сигнала u*д.пр в суммирующем узле совпадает со знаком приращения Dt1;
- импульс конечной высоты uд.пр и малой длительности |Dt1+Dtс|, действующий в момент t1+tс, полярность которого с учетом инвертирования сигнала u*д.пр противоположна знаку приращения Dt1+Dtс.
В соответствии со сказанным, заменяя импульсы малой длительности дельта-импульсами эквивалентной площади, получаем линейную импульсную модель, показанную на рис. 3а, в которой учтены указанные шесть импульсов, а время отсчитывается от тактового момента времени, когда отпирается силовой транзистор.

Рис. 3. Линейные импульсные модели для вариаций тока силового дросселя понижающего ППН:
а) исходная;
б, в) преобразованные
Импульсы конечной высоты uвых(t1+tс)+Duвых(t1+tс) и uвх(t1)+Duвх(t1) и малой длительности Dt1+Dtс и Dt1, показанные на рис. 2, на рис. 3а заменены дельта-импульсами эквивалентной площади, формируемыми на выходах идеальных импульсных элементов ИЭ1 и ИЭ2 и пропускаемыми через пропорциональные звенья с коэффициентами передачи uвых(t1+tс) и uвх(t1) соответственно. На входы ИЭ1 и ИЭ2 подаются малые сигналы Dt1+Dtс и Dt1, которые считаются непрерывными, а импульсные элементы фиксируют дискретные значения этих сигналов Dt1(t1+tс)+Dtс(t1+tс) и Dt1(t1) в моменты t1+tс и t1. Значениями Duвых(t1+tс) и Duвх(t1) пренебрегаем по сравнению с uвых(t1+tс) и uвх(t1). Ключи К1 и К2 на рис. 3а периодически замыкаются на время, показанное под изображением ключа. Аналогично импульсы конечной высоты uд.пр и малой длительности Dt1(t1) и Dt1(t1+tс)+Dtс(t1+tс) на рис. 3а заменяются дельта-импульсами эквивалентной площади uд.пр[Dt1(t1)] и uд.пр[Dt1(t1+tс)+Dtс(t1+tс)], формируемыми в ветвях с идеальными импульсными элементами ИЭ3 и ИЭ4. Параллельно соединенные ветви с одинаковыми идеальными импульсными элементами ИЭ1 и ИЭ4, ИЭ2 и ИЭ3 на рис. 3а можно заменить одной ветвью с таким же импульсным элементом и соединенным последовательно с ним пропорциональным звеном с коэффициентом передачи uвых(t1+tс)+uд.пр и uвх(t1)+uд.пр (рис. 3б). Учтем, что непосредственно из рассмотрения кривых сигналов iL(t) и iL(t)+DiL(t) на рис. 2 при малых отклонениях следует равенство

откуда найдем

В выражении (1) для понижающего ППН имеем:

где iL(t1+tс) = 0.
Теперь выражение (1) принимает вид:

Следовательно, входной сигнал Dt1+Dtс верхней ветви схемы на рис. 3б можно заменить сигналом DiL(t1+tс–0), добавив пропорциональное звено с коэффициентом передачи, соответствующим правой части (2), и преобразовать схему на рис. 3б к виду, показанному на рис. 3в.
Объединяя схему, представленную на рис. 3в, со схемой для выходного конденсатора, получаем линейную импульсную динамическую модель всей силовой части понижающего импульсного ППН для РПТ (рис. 4а). Номера импульсных элементов ИЭ1, ИЭ2 заменены на ИЭ2, ИЭ1 соответственно. Эта модель впервые была обоснована без учета uд.пр в докторской диссертации автора и приведена затем в [8].

Рис. 4. Линейные импульсные структурные модели силовой части понижающего ППН для:
а) РПТ;
б) РНТ
Для получения линейной импульсной модели для РНТ учтем, что в РНТ t1+tс = T и Dt1+Dtс = 0, следовательно, ветви с входным сигналом Dt1+Dtс на рис. 3а,б и ветви обратной связи по току DiL на рис. 3в и рис. 4а можно исключить. Ключ К2 на рис. 4а будет замкнут непрерывно, и его также можно исключить. Тогда получим динамическую модель, представленную на рис. 4б.
Повышающий ППН
На рис. 5 в верхней части сплошными линиями показаны кривые сигналов iL, i*L, uвых, u*вых, uвх, u*вх, uд.пр, u*д.пр, действующих в установившемся режиме структурной модели повышающего ППН (рис. 1б), а штриховыми линиями в значительной мере произвольно — кривые этих же сигналов в возмущенном режиме, обозначенных как iL+DiL, i*L+Di*L, uвых+Duвых, u*вых+Du*вых, uвх+Duвх, u*вх+Du*вх, uд.пр+Duд.пр, u*д.пр+Du*д.пр. В нижней части рис. 5 показаны кривые отклонений (вариаций) сигналов iL, i*L, uвых, u*вых, uвх, u*вх, u*д.пр отустановившихся кривых, обозначенные как DiL, Di*L, Duвых, Du*вых, Duвх, Du*вх, Du*д.пр.

Рис. 5. Временные диаграммы, поясняющие линеаризацию нелинейной дискретной структурной модели повышающего ППН; заштрихованы импульсы тока i*L, протекающего через силовой диод, и импульсы u*д.пр
Рассматривая кривые вариаций на рис. 5 совместно со структурной схемой на рис. 1б, видим, что на вход звена G(p) на каждом периоде подаются семь элементарных импульсов:
- импульс конечной высоты uвых(t1) и малой длительности |Dt1|, действующий в момент t1, полярность которого совпадает со знаком приращения Dt1;
- импульс конечной высоты uвых(t1+tс) и малой длительности |Dt1+Dtс|, действующий в момент t1+tс, полярность которого совпадает со знаком приращения Dt1+Dtс;
- импульс малой переменной высоты |Duвых(t)|, действующий на интервале tс, полярность которого совпадает со знаком сигнала Duвых(t);
- импульс конечной высоты uвх(t1+tс) и малой длительности |Dt1+Dtс|, действующий в момент t1+tс, полярность которого совпадает со знаком приращения Dt1+Dtс;
- импульс малой переменной высоты |Duвх(t)|, действующий на интервале t1+tс, полярность которого совпадает со знаком вариации Duвх(t);
- импульс конечной высоты uд.пр и малой длительности |Dt1|, действующий в момент t1, полярность которого противоположна знаку приращения Dt1;
- импульс конечной высоты uд.пр и малой длительности |Dt1+Dtс|, действующий в момент t1+tс, полярность которого противоположна знаку приращения Dt1+Dtс. Полагаем все приращения и вариации малыми.
В соответствии с вышесказанным, заменяя импульсы малой длительности дельта-импульсами эквивалентной площади, учитывая знаки, с которыми сигналы поступают на левый сумматор в схеме на рис. 1б, получаем показанную на рис. 6а импульсную модель, в которой учтены указанные семь импульсов. Объединяя ветви с одинаковыми входными сигналами Dt1 и Dt1+Dtс и одновременно срабатывающими импульсными элементами, получаем схему на рис. 6б.

Рис. 6. Линейные импульсные модели для:
а, б, в) вариаций тока силового дросселя;
г) выходного напряжения повышающего ППН
Как показывает кривая iL(t) на рис. 5, для повышающего ППН остается справедливым соотношение (1), где:

iL(t1+tс) = 0 и, следовательно,

С учетом последнего равенства соотношение (1) принимает вид

на основании которого из предыдущей схемы (рис. 6б) получаем схему с замкнутым контуром обратной связи по току дросселя (рис. 6в).
Сигнал Di*L, действующий на входе звена Z(p) (рис. 1б), согласно графику на рис. 5 может быть представлен в виде суммы двух импульсов:
- импульс конечной высоты iL(t1) и малой длительности |Dt1|, действующий в момент t1, полярность которого, согласно рис. 5, противоположна знаку приращения Dt1;
- импульс малой переменной высоты DiL(t), действующий на интервале tс, полярность которого совпадает со знаком вариации DiL(t) сигнала iL(t) на интервале tс. На основании сказанного получаем линеаризованную модель, показанную на рис. 6г.
Объединяя структурные схемы, показанные на рис. 6в,г, получаем линейную импульсную динамическую модель силовой части повышающего ППН в РПТ (рис. 7а).

Рис. 7. Линейные импульсные структурные модели силовой части повышающего ППН в: а) РПТ; б) РНТ
Для получения линейной структурной импульсной модели силовой части повышающего ППН в режиме непрерывного тока (РНТ) учтем, что в РНТ t1+tс = T и Dt1+Dtс = 0, поэтому ветви с входным сигналом Dt1+Dtс в схемах на рис. 6а, б и ветвь обратной связи по току DiL на рис. 6в можно исключить. Ключ К1 в схеме на рис. 7а замкнут непрерывно и его также можно исключить, ключи К2, К3 на рис 7а будут замкнуты в течение интервалов T–t1. Тогда получим структурную схему, представленную на рис. 7б.
Инвертирующий ППН
Временные диаграммы для нелинейной дискретной модели инвертирующего ППН (рис. 1в), представленные на рис. 8, качественно отличаются от временных диаграмм для повышающего ППН, показанных на рис. 5, только кривыми u*вх и Du*вх. Это связано с тем, что ключ К1 в схеме на рис. 1в замкнут в течение времени t1+tс, а в схеме на рис. 1г — только на интервале t1.

Рис. 8. Временные диаграммы, поясняющие линеаризацию нелинейной дискретной модели инвертирующего ППН; заштрихованы импульсы тока i*L, i*L+Di*L и напряжения u*д.пр
В верхней части рис. 8 сплошными линиями показаны кривые сигналов iL, i*L, uвых, u*вых, uвх, u*вх, uд.пр, u*д.пр, действующих в нелинейной модели инвертирующего ППН (рис. 1в) в установившемся режиме, а штриховыми линиями — кривые этих же сигналов в возмущенном режиме, обозначенные как iL+DiL, i*L+Di*L, uвых+Duвых, u*вых+Du*вых, uвх+Duвх, u*вх+Du*вх, uд.пр+Duд.пр, u*д.пр+Du*д.пр. Предполагается, что сигнал uд.пр(t) при переходе к возмущенному режиму не меняется. Кривые возмущенного сигнала должны мало отличаться от соответствующих кривых установившегося режима, в остальном их вид произволен.
В нижней части рис. 8 показаны приблизительно кривые сигналов DiL, Di*L, Duвых, Du*вых, Duвх, Du*вх, Du*д.пр, получаемые вычитанием кривых установившегося режима iL, i*L и других из соответствующих кривых возмущенного режима iL+DiL, i*L+Di*L и др.
Анализируя кривые вариаций сигналов на рис. 8 с учетом схемы на рис. 1в, видим, что на вход звена G(p) линеаризованной модели инвертирующего ППН на каждом периоде Т подаются семь элементарных импульсов:
- импульс конечной высоты uвых(t1) и малой длительности |Dt1|, действующий в момент t1, полярность которого противоположна знаку приращения Dt1;
- импульс конечной высоты uвых(t1+tс) и малой длительности |Dt1+Dtс|, действующий в момент t1+tс, полярность которого совпадает со знаком приращения Dt1+Dtс;
- импульс малой переменной высоты |Duвых(t)|, действующий на интервале tс, полярность которого совпадает со знаком сигнала Duвых(t) (все три перечисленных элементарных импульса, составляющие сложный импульс Du*вых(t) (рис. 8), согласно схеме на рис. 1в дополнительно инвертируются на входе суммирующего звена, поскольку сигнал u*вых(t) суммируется после инвертирования);
- импульс конечной высоты uвх(t1) и малой длительности |Dt1|, действующий в момент t1, полярность которого совпадает со знаком приращения Dt1;
- импульс малой переменной высоты |Duвх(t)|, действующий на интервале t1, полярность которого совпадает со знаком вариации Duвх(t) (два элементарных импульса, составляющие сложный импульс u*вых(t) (рис. 8), согласно схеме на рис. 1в на входе суммирующего звена не инвертируются);
- импульс конечной высоты uд.пр и малой длительности |Dt1|, действующий в момент t1, полярность которого противоположна знаку приращения Dt1;
- импульс конечной высоты uд.пр и малой длительности |Dt1+Dtс|, действующий в момент t1+tс, полярность которого совпадает со знаком приращения Dt1+Dtс. Последние два элементарных импульса, составляющих сложный импульс Du*д.пр(t) (рис. 8), согласно схеме на рис. 1в дополнительно инвертируются на входе суммирующего звена.
Полагаем все приращения и вариации малыми. С учетом перечисленных семи импульсов на входе звена G(p) получаем импульсную модель, представленную на рис. 9а.
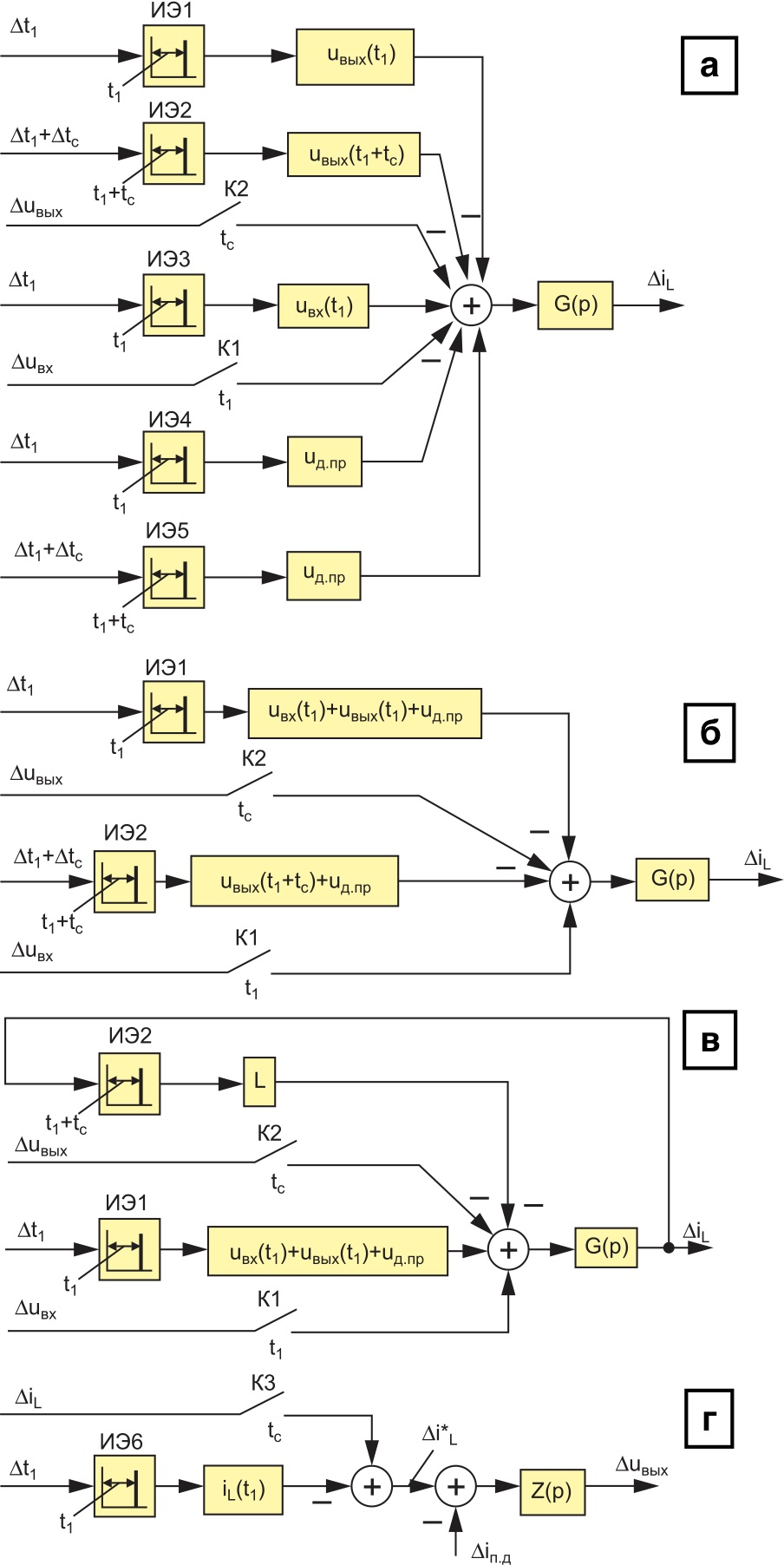
Рис. 9. Линейные импульсные модели для:
а, б, в) вариаций тока силового дросселя;
г) выходного напряжения инвертирующего ППН
Объединяя ветви с одинаковыми входными сигналами Dt1 и Dt1+Dtс и одновременно срабатывающими идеальными импульсными элементами, получаем схему, представленную на рис. 9б.
Как показано на рис. 8, для инвертирующего ППН остается справедливым соотношение (1), где, однако, производная тока дросселя слева от момента спада тока до нуля определяется иным выражением. Для инвертирующего ППН имеем:

где iL(t1+tс) = 0. Тогда соотношение (1) принимает вид:

Равенство (4) показывает возможность замены входного сигнала Dt1+Dtс в схеме на рис. 9б на сигнал DiL(t1+tс–0), взятый с выхода звена G(p) и пропущенный через пропорциональное звено с коэффициентом передачи L/[uвых(t1+tс)+uд.пр]. Тогда получим структурную схему, представленную на рис. 9в.
В линеаризованной модели, согласно схеме на рис. 1в, на вход звена Z(p) поступают сигналы Di*L(t) и –Diн.д(t).
Сигнал Di*L(t), согласно кривой на рис. 8, может быть представлен, как и в случае повышающего ППН, в виде алгебраической суммы двух импульсов. Поэтому схема на рис. 9г совпадает со схемой, представленной на рис. 6г.
Объединяя схемы, представленные на рис. 9в, г, получаем линеаризованную импульсную динамическую модель силовой части инвертирующего ППН в РПТ (рис. 10а).

Рис. 10. Линейные импульсные структурные модели силовой части инвертирующего ППН в:
а) РПТ;
б) РНТ
Из сравнения линейных импульсных структурных моделей ППН (рис. 4, 7, 10) можно сделать следующие выводы:
- Общим всех этих схем является наличие в РПТ внутреннего контура обратной связи по току дросселя через импульсный элемент ИЭ2, который в РНТ отсутствует. Наличие этого контура существенно усложняет строгий анализ этих моделей.
- Основная часть этих моделей от входа импульсного элемента ИЭ1 до выхода отличается напряжением схемы uсх, которое входит в качестве коэффициента передачи пропорционального звена. Это напряжение определяется как uсх = uвх(t1)+uд.пр; uсх = uвых(t1)+uд.пр; uсх = uвх(t1)+uвых(t1)+uд.пр соответственно для понижающей, повышающей и инвертирующей схем. Модели для повышающей и инвертирующей схем отличаются также наличием ключа К3 между звеньями G(p) и Z(p), которого нет в модели для понижающей схемы.
- Модели для повышающей и инвертирующей схем (рис. 7 и 10) отличаются также от модели для понижающей схемы (рис. 4) наличием дополнительной ветви прямой связи через звено с коэффициентом передачи iL(t1). Известно, что эта связь приводит к тому, что модели для повышающего и инвертирующего ППН становятся неминимально фазовыми.
Обоснованные в данной статье динамические модели широко использовались в работах автора для анализа динамики импульсных ППН. Однако ранее в большинстве работ [7, 8] не учитывалось ЭПС выходного конденсатора rC и прямое падение напряжения на силовом диоде uд.пр. Учет uд.пр оказывается необходимым лишь в ППН с низким выходным напряжением. Эти модели непосредственно вытекают из обоснованных в предыдущей статье [1] нелинейных моделей. Обнаруживается также тесная связь этих моделей с усредненными моделями, которые широко используются в отечественной и зарубежной литературе. Эта связь оказывается особенно простой при работе ППН в РНТ.
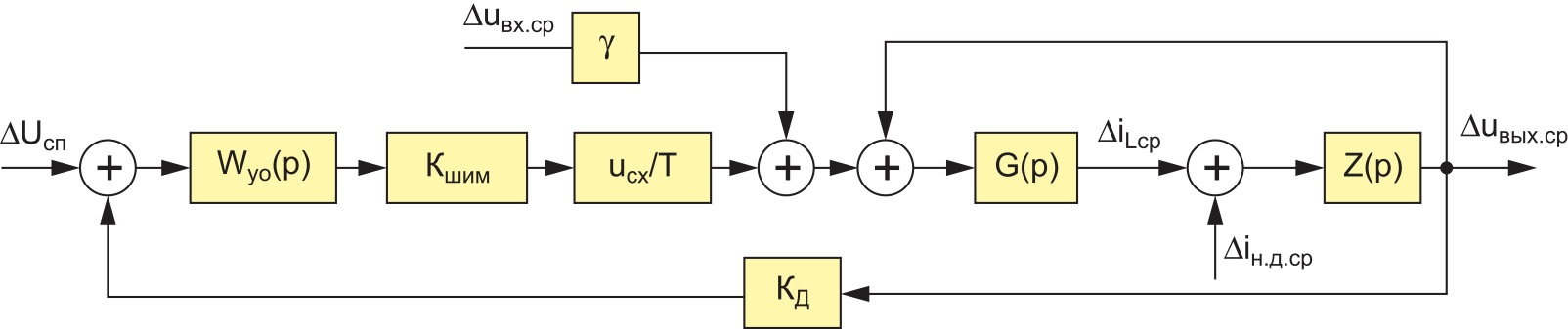
Рис. 11. Усредненная линеаризованная структурная модель понижающего ППН в РНТ с одноконтурной системой управления: Wуо(p) — передаточная функция усилителя ошибки; КШИМ — коэффициент передачи широтно-импульсного модулятора; Кд — коэффициент передачи делителя напряжения
На рис. 11 представлена усредненная линеаризованная структурная модель понижающего ППН в РНТ с одноконтурной системой управления, полученной с использованием импульсной модели силовой части, приведенной на рис. 4б, в которой идеальный импульсный элемент ИЭ1 заменен пропорциональным звеном с коэффициентом передачи 1/T, а ключ K1 — пропорциональным звеном с коэффициентом передачи g=t1/T. Все переменные токи и напряжения заменены на их средние значения.
Схема на рис. 11 удобна для анализа и синтеза систем управления импульсными ППН, поскольку позволяет использовать все методы, разработанные в линейной теории автоматического управления. Этой теорией владеют намного больше специалистов и студентов вузов, чем теорией линейных импульсных систем [6]. Однако непрерывные модели не позволяют исследовать влияние частоты переключений на динамику ППН.
Примеры использования этой модели (рис. 11) для синтеза импульсных ППН приведены в [9–12].
- Шипилло В. П., Чикотило И. И. Устойчивость замкнутой системы с широтно-импульсным преобразователем // Электричество. 1978. № 1.
- Донской Н. В., Иванов А. Г., Никитин В. М., Поздеев А. Д. Управляемый выпрямитель в системах автоматического управления. М.: Энергоатомиздат. 1984.
- Александров Ф. И., Сиваков А. Р. Импульсные полупроводниковые преобразователи и стабилизаторы постоянного напряжения. Л.: Энергия. 1970.
- Белов Г. А. Нелинейные дискретные структурные динамические модели силовых частей импульсных ППН // Силовая электроника. 2014. № 3.
- Цыпкин Я. З. Релейные автоматические системы. М.: Наука. 1974.
- Ту Ю. Цифровые и импульсные системы автоматического управления / Пер. с англ. М.: Машиностроение. 1964.
- Белов Г. А. Динамические модели инвертирующего импульсного стабилизатора напряжения // Электричество. 1990. № 4.
- Белов Г. А. Структурные модели и исследование динамики импульсных преобразователей // Электричество. 2008. № 4.
- Белов Г. А., Серебрянников А. В., Павлова А. А. К синтезу одноконтурных систем управления понижающими импульсными преобразователями // Практическая силовая электроника. 2013. № 2 (50).
- Белов Г. А., Серебрянников А. В., Павлова А. А. Синтез одноконтурной системы управления понижающим импульсным преобразователем // Практическая силовая электроника. 2013. № 3 (51).
- Белов Г. А., Серебрянников А. В. К синтезу одноконтурной системы управления двухтактным импульсным преобразователем // Силовая электроника. 2013. № 3.
- Белов Г.А., Серебрянников А.В. Синтез одноконтурной системы управления двухтактным импульсным преобразователем // Силовая электроника. 2013. № 4.
 8 октября, 2007
8 октября, 2007 23 июня, 2020
23 июня, 2020 23 марта, 2015
23 марта, 2015