

ШКОЛА MATLAB. Урок 27. Система управления возбуждением синхронного магнитоэлектрического генератора
Введение
Магнитоэлектрические машины, на роторе которых монтируются редкоземельные магниты (в английской терминологии PMSM — Permanent Magnet Synchronous Machine), повсеместно вытесняют машины с электромагнитным возбуждением в мехатронных системах в диапазоне мощностей от единиц ватт до десятков мегаватт. Это обусловлено прежде всего высокой надежностью таких машин, хорошими энергетическими характеристиками, пониженными массами и габаритами.
В последние годы мехатронные системы с PMSM находят самое широкое применение в генераторных установках автономных и неавтономных объектов, таких как гибридный автотранспорт, ветрогенераторы, авиационные и судовые генераторные установки, и других. Ниже рассматривается система с судовым дизель-генератором, в которой электрический генератор выполнен на PMSM. В дизель-генераторной установке с классическим электромагнитным синхронным генератором активная электрическая мощность на выходе поддерживается за счет регулятора скорости дизеля, а реактивная электрическая мощность на выходе — за счет регулятора напряжения возбуждения самого генератора. При применении PMSM в качестве электрического генератора отсутствует возможность регулирования напряжения возбуждения, что вызывает уменьшение напряжения на выходе генератора при возрастании нагрузки. Идея компенсации падения напряжения на выходе генератора с PMSM, предлагаемая в статье, основана на генерации отрицательной (емкостной) реактивной мощности в якоре генератора. Эту мощность обеспечивает автономный инвертор с конденсатором в цепи постоянного тока, включенный параллельно генератору на общую нагрузку.
Математическое описание и анализ
Магнитоэлектрические генераторы с редкоземельными магнитами на роторе (PMSG) по сравнению с обычными синхронными генераторами с электромагнитным возбуждением (classic SG) обладают более высоким коэффициентом полезного действия, сохраняющимся в широком диапазоне изменения мощности на выходе. В качестве одного из примеров на рис. 1 представлены сравнительные энергетические характеристики двух указанных генераторов, приведенные в официальном отчете исследований фирмы АВВ [13].
![Коэффициент полезного действия синхронных генераторов по [13]](https://power-e.ru/wp-content/uploads/02_74_01.jpg)
Рис. 1. Коэффициент полезного действия синхронных генераторов по [13]
Однако при применении PMSM в качестве электрического генератора отсутствует возможность регулирования напряжения возбуждения, что вызывает уменьшение напряжения на выходе генератора при возрастании нагрузки. Компенсация этого падения напряжения далее исследуется в структуре, блок-схема которой представлена на рис. 2.

Рис. 2. Блок-схема системы с генератором на PMSM
Система содержит:
- двигатель внутреннего сгорания (ДВС) с регулятором скорости (РСД);
- синхронный генератор с редкоземельными магнитами на роторе (СГ);
- автономный инвертор (АИ) с системой управления (СУАИ);
- электрическую сеть переменного тока (220/380 В, 50 Гц);
- изменяющуюся нагрузку (Н).
Назначение автономного инвертора состоит в поддержании постоянного напряжения в электрической сети при изменении нагрузки.
При построении схемы управления АИ, рассчитанным на работу с изменяющейся нагрузкой, управление инвертором организуется в системе с релейной отрицательной обратной связью по току [3, 4, 8, 10]. Такое управление получило название «токовое управление», или «токовый коридор».
В этом случае электромагнитные процессы в системе могут быть исследованы на основании эквивалентной схемы, представленной на рис. 3.

Рис. 3. Эквивалентная схема замещения системы управления возбуждением синхронного генератора
В данной эквивалентной схеме замещения автономный инвертор представлен управляемым источником тока –J(t), который подключен параллельно нагрузке и статорным обмоткам синхронного генератора с неизменной ЭДС ( –E1(t)). Индуктивное и активное сопротивления в схеме замещения являются внутренними параметрами СГ. Математическое описание системы во вращающейся синхронно с валом СГ системе координат может быть представлено в виде:

где –E1(t) — пространственный (результирующий) вектор ЭДС на статорных обмотках генератора; –U1(t) — пространственный вектор напряжения на нагрузке; –I1(t) — пространственный вектор тока в якоре СГ дизель-генератора; –J(t) — пространственный вектор первой гармоники тока, генерируемого инвертором; –IL(t) — пространственный вектор тока в нагрузке; x = ωL — реактивное сопротивление синхронного генератора; r — активное сопротивление синхронного генератора.
Заметим, как и в предыдущих уроках, что запись –E1(t), –U1(t), –I1(t), –J(t) и т. д. в уравнениях (1) подчеркивает то обстоятельство, что эти величины являются постоянными с изменяющимися во времени значениями. Изменения значений токов, напряжений и ЭДС наблюдаются во время переходных процессов.
В установившемся режиме, при учете соотношения r<< x, система уравнений (1) преобразуется к виду:

Наличие управляемого по величине и фазе источника тока –J(t) позволяет поддерживать неизменное напряжение в электрической сети при изменении нагрузки за счет генерации отрицательного (емкостного) реактивного тока. Дальнейший расчет системы осуществляется с помощью векторной диаграммы, построенной с использованием математического описания (2).
Расчет и моделирование
Построение векторной диаграммы основывается на требовании постоянства напряжения на нагрузке при изменении режима работы генератора от холостого хода до максимальной нагрузки. Если обозначить ЭДС с генератора на холостом ходу через –E10, то для любой нагрузки это требование сводится к равенству –E10 = –U1.

Рис. 4. Векторная диаграмма электромагнитных процессов в системе управления возбуждением синхронного генератора
С учетом этого требования на рис. 4 построена векторная диаграмма системы, из геометрических соотношений которой следует:

На основании уравнений (3) можно определить ток инвертора, обеспечивающий постоянство напряжения при изменении нагрузки:

Токи нагрузки определяются активной и реактивной мощностью нагрузки по уравнениям:

Уравнения (4, 5) позволяют рассчитать заданный (управляющий) ток инвертора как функцию активной и реактивной мощности нагрузки. Результаты этого расчета представлены на рис. 5.

Рис. 5. Регулировочная характеристика инвертора
Проекции рассчитанной поверхности на основную плоскость показывают зависимости тока инвертора от активной и реактивной мощности в нагрузке (PL и QL), которые свидетельствуют о том, что требуемый ток инвертора не зависит от активной мощности в нагрузке, а определяется только реактивной мощностью. При компенсации реактивного тока инвертор выполняет функцию активного фильтра, что позволяет отказаться от источника питания постоянного тока и в цепи питания инвертора включить конденсатор. На основании проведенного анализа построена модель системы, представленная на рис. 6.

Рис. 6. Модель системы управления возбуждением синхронного генератора с PMSM
Сигнал управления инвертором в модели рассчитывается по уравнениям (4, 5).
На рис. 7 показаны электромагнитные процессы в системе:
- трехфазные напряжения на нагрузке (U_Load);
- трехфазные токи нагрузки I_Load;
- трехфазные токи якоря генератора I_PMSG;
- трехфазные токи на выходе инвертора I_AI.
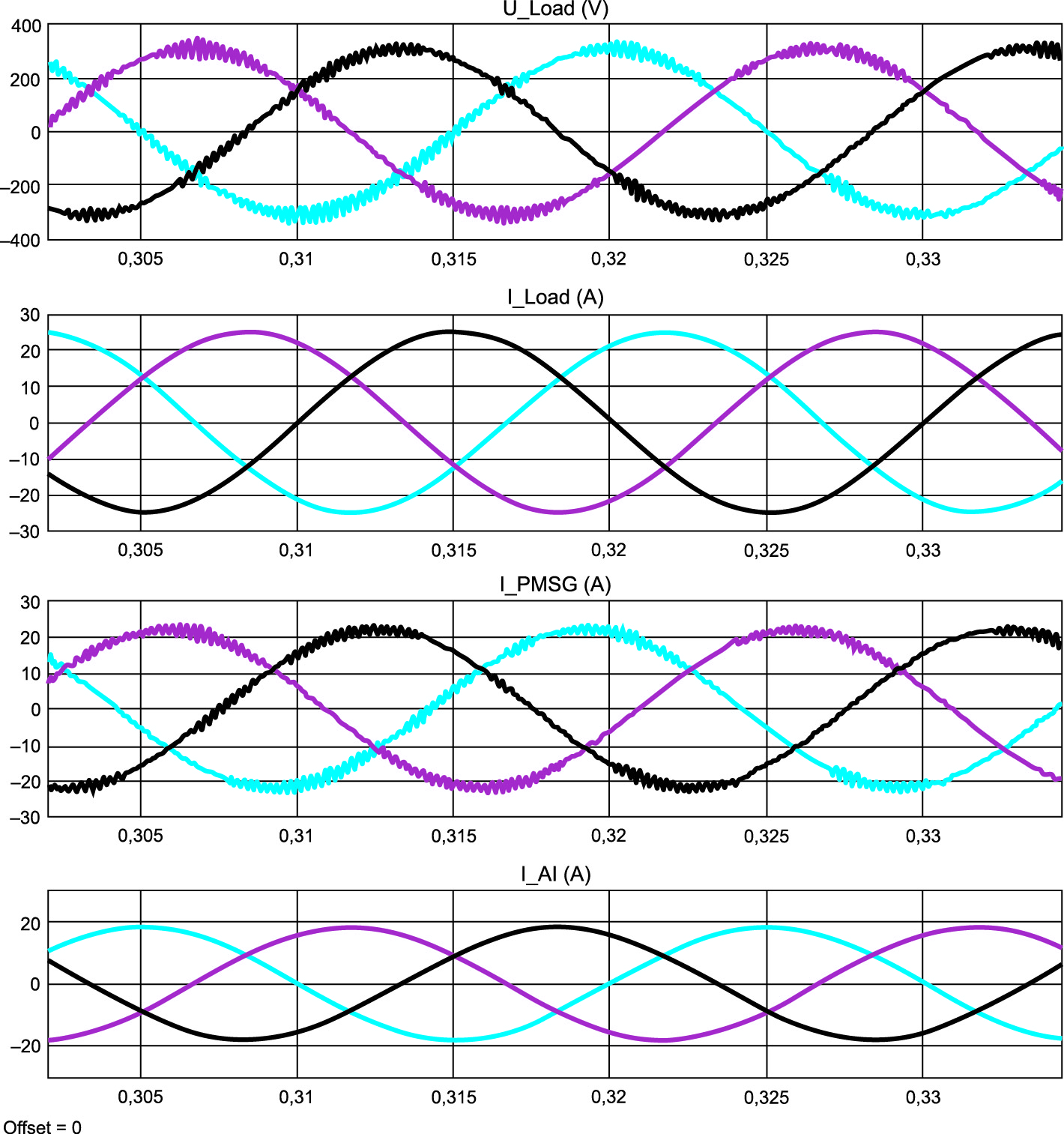
Рис. 7. Электромагнитные процессы в системе
Из сравнения фазовых соотношений между электромагнитными переменными видно, что от инвертора потребляется реактивный (емкостный) ток.
На рис. 8 представлены энергетические процессы в системе:
- активные мощности в нагрузке (P_Load), на выходе генератора P_PMSG и инвертора P_AI;
- реактивные мощности в нагрузке (Q_Load), на выходе генератора Q_PMSG и инвертора

Рис 8. Энергетические процессы в системе
Эти характеристики, во-первых, подтверждают факт отсутствия активной мощности, потребляемой от инвертора, и, во-вторых, тот факт, что реактивная мощность, потребляемая от инвертора, превышает реактивную мощность нагрузки. Добавочная реактивная мощность инвертора идет на компенсацию реактивной мощности самой машины, восполняя тем самым реакцию якоря.
На рис. 9 приведено сравнение нагрузочных характеристик генератора без компенсации реакции якоря и с компенсацией реакции якоря при помощи инвертора. Эти результаты получены на модели (рис. 6). Сравнение результатов моделирования показывает, что в предложенной системе достигается компенсация падения напряжения на нагрузке при ее изменении.

Рис. 9. Зависимость напряжения на нагрузке от тока нагрузки в системе с инвертором и без инвертора
Заключение
Идея стабилизации напряжения на нагрузке, предложенная авторами статьи, основана на свойствах синхронных электрических машин. В этих машинах индуктивный характер нагрузки приводит к уменьшению напряжения с увеличением тока. Емкостный характер нагрузки вызывает рост напряжения с увеличением тока нагрузки. Инвертор с токовым управлением генерирует такой емкостный ток, который позволяет компенсировать влияние реакции якоря, вызванное индуктивным током нагрузки.
- Булгаков А. А. Новая теория управляемых выпрямителей. М.: Наука, 1970.
- Бельский А. А., Абрамович Б. Н. Критерий выбора оптимальных параметров ветродизельных комплексов для энергообеспечения потребителей минерально-сырьевого комплекса. XL Неделя науки СПбГПУ: материалы межд. науч.-практ. конф., ч. II. СПб., изд-во СПбГПУ, 2011.
- Бродовский В. Н., Иванов Е. С. Приводы с частотно-токовым управлением. М.: Энергия, 1974.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Урок 24. Мехатронная система с магнитоэлектрическим генератором и активным полупроводниковым выпрямителем // Силовая электроника. 2018. № 1.
- Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. Пер. с нем. М.-Л.: Госэнергоиздат, 1963.
- Константинов В. Н. Синхронизация судовых синхронных генераторов. Теория и методы расчета. Л.: Судостроение, 1978.
- Кундас С. П., Шенк Ю., Вайцехович Н. Н. Гибридные технологии в использовании возобновляемых источников энергии // Энергоэффективность. 2012. № 2.
- Овчинников И. Е. Вентильные электрические двигатели и привод на их основе (малая и средняя мощность). Курс лекций. СПб., КОРОНА — Век, 2006.
- Розанов Ю. К. Силовая электроника. М.: Издательский дом «МЭИ», 2007.
- Соколовский Г. Г. Электроприводы переменного тока с частотным управлением. М.: Академия, 2006.
- Ясаков Г. С. Корабельные электроэнергетические системы. Часть 1. СПб., Военно-морская академия им. Адмирала Флота Советского Союза Н. Г. Кузнецова, 1999.
- Баранов М. В. и др. Электрические следящие приводы с моментным управлением исполнительными двигателями. Монография. М.: Изд-во МГТУ им. Н. Э. Баумана, 2006.
- Technical Specification: 8AMG 5862150. ABB Generators Ltd., 2012.
 22 октября, 2021
22 октября, 2021 4 сентября, 2020
4 сентября, 2020 14 января, 2024
14 января, 2024