
ШКОЛА MATLAB. Урок 32. Многовариантный модельный анализ асинхронного электропривода с прямым управлением моментом
Введение
Прямое управление моментом в асинхронном электроприводе (DTC — direct torque control) осуществляется за счет реализации скользящих режимов работы в каналах управления потоком и моментом.
Идея такого управления была впервые выдвинута в 1979 году Г. Б. Онищенко и И. Л. Локтевой [5]. Позднее, в 1984 году, этот метод управления описал немецкий профессор М. Депенброк, назвав его «прямое саморегулирование» (DSC — direct self-control) [10, 11]. Несколько позже японские исследователи И. Тэкэхэши и Т. Ногучи опубликовали разработанный ими принцип, получивший в дальнейшем название принцип «прямого управления потокосцеплением» (DFLC — direct flux linkage control) [12]. Суть разработанного ими метода заключалось в управлении величиной потокосцепления статора непосредственно путем изменения вектора его напряжения. Метод DFLC не включал каких-либо средств, выполняющих оценку потокосцепления машины. В 1986 году Тэкэхэши и Ногучи ввели в структуру управления модель оценки потокосцепления, позволяющую в процессе работы осуществлять стабилизацию потокосцепления. В 1989 году в публикации Тэкэхэши и Охмори при описании метода управления, объединяющего DFLC-управление и потоковую модель, впервые была использована аббревиатура DTC [13].
Первые образцы асинхронных приводов с DTC-управлением были опробованы в конце 1980-х в Германии, на дизель-электрических локомотивах в качестве тяговых устройств. Через 10 лет, в 1995-м, в Финляндии фирмой ABB впервые был разработан серийный электропривод ACS600 с прямым управлением моментом [14, 15].
Процесс создания современных систем управления сложными объектами, которые в настоящее время именуются мехатронными, должен включать этап модельного исследования, позволяющий получить основные характеристики реального объекта.
Разработка адекватной модели, на которой можно имитировать действие исследуемой системы, позволяет исключить этап эскизного проектирования и существенно сократить этап технического проектирования, а следовательно — сэкономить время и средства на разработку.
Для получения адекватных с реальными установками результатов при проведении модельных исследований электропривода приходится разрабатывать различные типы моделей [3], из которых наиболее частыми выступают два типа:
- Структурная модель, строящаяся по системе уравнений, описывающей электромагнитные и электромеханические процессы в электроприводе, обычно применяемая для оценки его динамических показателей.
- Виртуальная, или имитационная, модель, имитирующая работу электропривода и состоящая из тех же элементов, что и реальная система. Эта модель позволяет исследовать динамические, электромагнитные, электромеханические и энергетические характеристики электропривода.
Совпадение характеристик, полученных на структурной и виртуальной модели, служит достаточно надежным доказательством адекватности разработанных моделей и правильности примененного математического аппарата. Кроме того, виртуальная модель позволяет непосредственно перейти к модельно ориентированному проектированию и прототипированию системы [4].
Математическое описание асинхронного электропривода с DTC
Прямое управление моментом (DTC) является продолжением развития векторного подхода к построению систем управления асинхронными двигателями [7].
В основе всех систем управления лежит описание электромагнитных процессов асинхронного короткозамкнутого двигателя во вращающейся системе координат с использованием метода обобщенного (пространственного) вектора [6]. Это математическое описание имеет вид [7]:
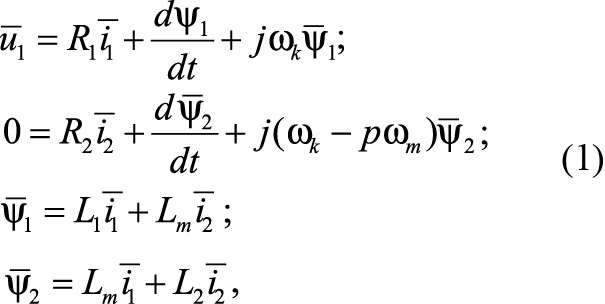
где ![]() — вектор напряжения статора;
— вектор напряжения статора; ![]() — векторы потокосцеплений и токов статора и ротора; R1, L1, R2, L2 — активные сопротивления и полные индуктивности статора и ротора соответственно; Lm — главная индуктивность намагничивающего контура; ωk — угловая скорость вращения системы координат, ωm — угловая скорость вращения ротора, р — число пар полюсов двигателя.
— векторы потокосцеплений и токов статора и ротора; R1, L1, R2, L2 — активные сопротивления и полные индуктивности статора и ротора соответственно; Lm — главная индуктивность намагничивающего контура; ωk — угловая скорость вращения системы координат, ωm — угловая скорость вращения ротора, р — число пар полюсов двигателя.
Основные особенности систем с прямым управлением моментом:
- При описании электромагнитных процессов в асинхронном электроприводе с прямым управлением моментом в качестве переменных состояния выбирают потокосцепление статора и потокосцепление ротора. При этом система уравнений (1) преобразуется к виду:

- В качестве базового вектора выбирают вектор потокосцепления ротора, при этом момент определяется параметрами и переменными состояния двигателя из уравнения:
![]()
- Система управления электроприводом строится двухканальной во вращающейся со скоростью ωk системе координат. В канале x поддерживается постоянным модуль потокосцепления статора
 за счет реализации скользящего режима по проекции потокосцепления статора Ψ1x. В канале y осуществляется управление моментом за счет реализации скользящего режима по моменту.
за счет реализации скользящего режима по проекции потокосцепления статора Ψ1x. В канале y осуществляется управление моментом за счет реализации скользящего режима по моменту. - Преобразование сигналов управления в сигналы переключения транзисторов инвертора осуществляется с использованием таблицы оптимальных переключений [8], в которой реализуется вращение координат. Скорость вращения координат при этом определяется в соответствии с уравнением:
![]()
При анализе электромагнитных процессов в уравнении момента (3) можно считать, что вектор потокосцепления ротора в процессе работы остается неизменным [8]. Следовательно, изменение значения Ψ1y путем воздействия на пространственный вектор напряжения, приложенный к обмоткам статора, приведет к изменению величины M. Более подробное описание принципа прямого управления моментом можно найти в литературных источниках [1, 8, 9].
Блок-схема системы с прямым управлением моментом приведена на рис. 1.

Рис. 1. Блок-схема прямого управления моментом
Математическое описание системы осуществляется в координатах x, y, синхронно вращающихся с вектором потокосцепления ротора ![]() , вещественная ось х которых совпадает с вектором Ψ2, то есть
, вещественная ось х которых совпадает с вектором Ψ2, то есть ![]() .
.

В уравнениях (2, 4, 5).:
![]()
параметры структурной модели асинхронного двигателя.
Структурная модель асинхронного электропривода с DTC и ее динамические характеристики
В дальнейших исследованиях в качестве исполнительного асинхронного двигателя выбран двигатель 20HP (15kW) 400V 50 Hz из библиотеки SimPower System.
Приведенная выше система уравнений (5) описывает электромагнитные и электромеханические процессы по основной составляющей, протекающие в асинхронном электроприводе при его работе с нагрузкой. Такая система имеет два раздельных канала управления [8]. Один канал включает релейный регулятор и выполняет функцию стабилизации потокосцепления статора, величина которого задается на входе этого канала. Величина, поступающая на вход другого канала, является сигналом задания скорости вращения — после сравнения с фактическим значением скорости он поступает на вход ПИ регулятора, на выходе которого формируется сигнал задания величины электромагнитного момента. Полученный в результате сравнения фактического и заданного значения момента сигнал ошибки по моменту преобразуется релейным регулятором в напряжение, подаваемое на вход модели асинхронного двигателя.
С учетом перечисленных особенностей построена структурная модель электропривода в пакете Simulink. Эта модель представлена на рис. 2.
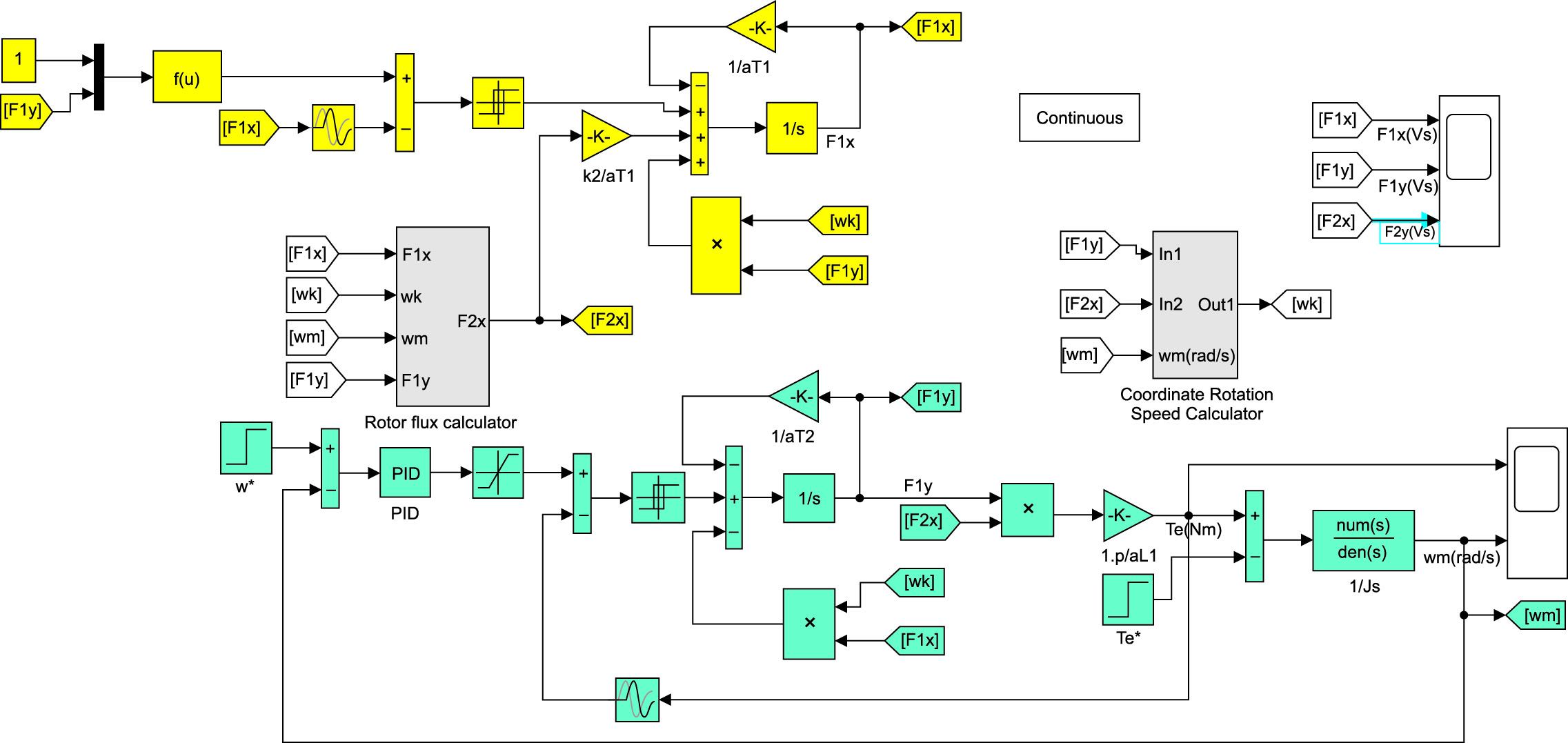
Рис. 2. Структурная модель асинхронного электропривода с прямым управлением моментом
В блоке Rotor flux Calculator, модель которого показана на рис. 3, вычисляется потокосцепление ротора по третьему уравнению системы (5). В блоке Сoordinate Rotation Speed Calculator, чья модель представлена на рис. 4, вычисляется скорость вращения координат в соответствии с четвертым уравнением системы (5).

Рис. 3. Структурная модель блока вычисления потокосцепления ротора асинхронного электропривода с прямым управлением моментом

Рис. 4. Структурная модель блока вычисления скорости вращения координат асинхронного электропривода с прямым управлением моментом
На первый вход модели электропривода поданы сигнал задания модуля потокосцепления статора и его проекции на координатную ось y. Блок f(u) вычисляет проекцию потокосцепления статора на координатную ось x по пятому уравнению системы (5). На второй вход модели подается сигнал задания скорости (блок w*).
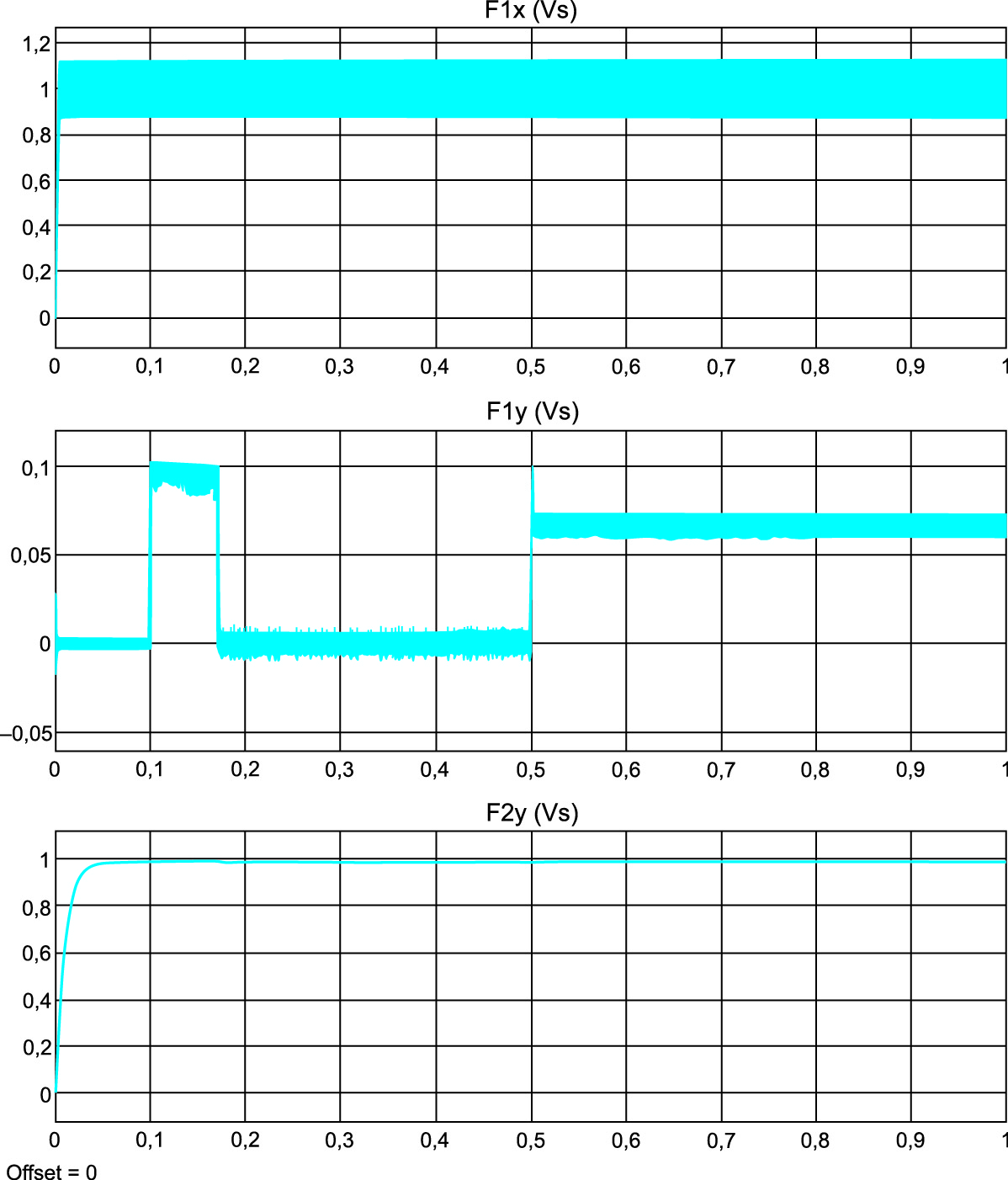
Рис. 5. Потокосцепления асинхронного двигателя в электроприводе с прямым управлением моментом
На рис. 5 и 6 приведены графики переходных процессов потокосцеплений, момента и скорости в электроприводе, полученные в результате моделирования структурной модели с ПИ-регуляторами в канале задания потокосцепления и скорости.

Рис. 6. Переходные процессы по моменту и скорости в асинхронном электроприводе с прямым управлением моментом
По переходному процессу видно, что электромагнитный момент изменяется практически скачком, это в свою очередь свидетельствует о высоком быстродействии системы с DTC-управлением. Быстрый отклик системы на возмущающее воздействие также подтверждает и часть графика после t = 0,5 c. В этот момент времени к двигателю прикладывается момент нагрузки. Как видно из графика, отработка этого воздействия происходит без какого-либо запаздывания.
Скоростная ошибка, вызванная приложенным внешним моментом нагрузки, интегральной составляющей в регуляторе сводится к нулю, то есть привод по возмущению имеет астатизм первого порядка.
Виртуальная модель асинхронного электропривода с DTC и ее динамические характеристики
Структурная модель электропривода с DTC-управлением позволяет разработчикам получать необходимые динамические характеристики и создает основу для построения виртуальной модели, при помощи которой могут быть реализованы необходимые этапы проектирования электропривода. Виртуальная модель приведена на рис. 7.

Рис. 7. Виртуальная модель асинхронного электропривода с прямым управлением моментом
В этой модели система управления электроприводом (блок Induction Machine Direct Torque Control) является маскированным библиотечным блоком пакета, панель настройки параметров которого показана на рис. 8.

Рис. 8. Параметры библиотечного блока управления асинхронного электропривода с прямым управлением моментом
Заданными параметрами здесь являются:
- сопротивление фазной статорной обмотки асинхронного двигателя;
- число пар полюсов асинхронного двигателя;
- ширина петли гистерезиса релейного блока в канале потока статора;
- ширина петли гистерезиса релейного блока в канале момента.
Состав маскированного блока Induction Machine Direct Torque Control показан на рис. 9.

Рис. 9. Состав маскированного блока Induction Machine Direct Torque Control модели электропривода
В блоке Flux and torque estimator по измеренным в модели (рис. 8) фазовым напряжениям и токам рассчитываются реальный ток, момент и фаза обобщенного вектора потокосцепления статора. В блоке Flux and torque control реализованы релейные регуляторы потока и момента. В блоке Switching table выполнена таблица оптимальных переключений, с выхода которой осуществляется управление транзисторами инвертора.
Фазные напряжения и токи асинхронного двигателя, работающего под нагрузкой в 100 Н·м, представлены на рис. 10.

Рис. 10. Электромагнитные процессы в асинхронном электроприводе с прямым управлением моментом
Переходные процессы в системе по моменту и скорости показаны на рис. 11. Эти переходные процессы снимались при тех же условиях, что и в структурной модели. Полное совпадение результатов структурного и виртуального моделирования свидетельствует об адекватности структурной модели, а следовательно, и о справедливости полученных уравнений (5), описывающих рассматриваемую систему по основной («гладкой») составляющей.

Рис. 11. Переходные процессы по моменту и скорости в асинхронном электроприводе с прямым управлением моментом
Заключение
В статье описана разработка структурной и виртуальной модели асинхронного электропривода с прямым управлением моментом, исследование его на обеих моделях, сравнение динамических характеристик, доказательство адекватности модели и системы уравнений, по которой непосредственно строится структурная модель. Виртуальная модель асинхронного электропривода служит основой для дальнейших исследований электромагнитных и энергетических характеристик электропривода с прямым управлением моментом.
- Браславский И. Я., Ишматов З. Ш., Барац Е. И. Адаптивная система прямого управления моментом асинхронного двигателя различных электроприводов. // Электротехника. 2001. № 11.
- Булгаков А. А. Новая теория управляемых выпрямителей. М.: Наука, 1970.
- Герман-Галкин С. Г., Ляпин А. С. Анализ и модельное исследование асинхронного электропривода со скользящим управлением потокосцеплением и моментом. Мехатроника, Автоматизация, Управление. №4, 2012.
- Герман-Галкин С. Г. ШКОЛА MATLAB. Виртуальные лаборатории устройств силовой электроники в среде Matlab – Simulink. Урок 21. Модельный многовариантный синтез асинхронного электропривода // Силовая электроника. 2016. № 4.
- Онищенко Г. Б., Локтева И. Л. Асинхронные вентильные каскады и двигатели двойного питания. М.: Энергия, 1979.
- Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. Пер. с нем. М.-Л., Госэнергоиздат, 1963.
- Слежановский О. В., Дацковский Л. Х., Кузнецов И. С., Лебедев Е. Д., Тарасенко Л. М. Системы подчиненного регулирования электропривода переменного тока с вентильными преобразователями. М.: Энергоатомиздат, 1983.
- Соколовский Г. Г. Электропривод переменного тока с частотным регулированием. М.: ACADEMIA, 2006.
- Усольцев А. А. Частотное управление асинхронными двигателями. Учебное пособие. СПб.: СПБГУ ИТМО, 2006.
- United States Patent 4.678.248. Direct-self control of the flux and rotary moment of a rotary field machine.
- Depenbrock M. Direct Self-Control (DSC) of Inverter-Fed Induction Machine // IEEE Transaction On Power Electronics. 1988. Vol. 3. No. 4.
- Takahashi I., Noguchi T. A New Quick-Response and High-Efficiency Control Strategy of an Induction Motor // IEEE Transaction On Industry Application. 1986. Vol. 22. No. 5.
- Niemelä Position Sensorless Electrically Excited Synchronous Motor Drive for Industrial Use Based on Direct Flux Linkage and Torque Control. Dissertation. Lappeenranta University of Technology. Lappeenranta, Finland, 1999.
- Jänecke M., Kremer R., Steuerwald G. Direct Self-Control (DSC), A Novel Method Of Controlling Asynchronous Machines In Traction Applications // Proceedings of EPE. 1989. Vol. 1.
- Tiitinen P., Pohjalainen P., Lalu J. The Next Generation Motor Control Method: Direct Torque Control (DTC) // EPE Journal. 1995. Vol. 5. No. 1.
- Nash J. N. Direct Torque Control, Induction Motor Vector Control Without an Encoder // IEEE Transaction On Industry Application. 1997. Vol. 33. No. 2.
- novtex.ru/mech
 2 августа, 2010
2 августа, 2010 27 марта, 2020
27 марта, 2020