
ШКОЛА MATLAB. Урок 23. Многовариантный анализ вентильного электропривода c бесконтактным двигателем постоянного тока
Введение
В соответствии с терминологией, принятой в отечественной литературе, синхронный двигатель с постоянными магнитами на роторе (СДПМ, в англоязычной версии — Permanent Magnet Synchronous Machine, PMSM), включенный в замкнутую систему с датчиком положения ротора (ДПР) и силовым полупроводниковым преобразователем (СПП), называется вентильным двигателем (ВД) [3, 5, 7]. Обмотка статора СДПМ выполняется в двух вариантах: сосредоточенная (рис. 1а) и распределенная (рис. 1б) обмотки.

Рис. 1. Элемент статора СДПМ:
а) модульная конструкция;
б) традиционная конструкция
В варианте с сосредоточенной обмоткой СДПМ может быть реализован в модульном конструктивном исполнении [2], что позволяет:
- существенно упростить технологию изготовления двигателя;
- значительно (на 20–30%) увеличить коэффициент заполнения обмотки;
- без изменения конструкции простым переключением обмоток модулей использовать двигатель на различные напряжения;
- обеспечить простой ремонт двигателя;
- исключить лобовые части обмоток.
В варианте с распределенной обмоткой магнитное поле в рабочем зазоре двигателя распределено по практически гармоническому закону и при синусоидальном управлении позволяет осуществить его математическое описание во вращающихся координатах системой аналитически разрешимых дифференциальных уравнений [3].
При наличии сосредоточенных обмоток магнитное поле в рабочем зазоре двигателя распределено по трапецеидальному закону, что требует формирования прямоугольных токов в фазных обмотках двигателя длительностью в 120 эл. град. [5]. Формирование прямоугольной формы токов в обмотках в свою очередь требует применения замкнутых токовых контуров. Таким образом, особенность конструкции обмотки двигателя вызывает специальные требования к построению, управлению и анализу вентильного электропривода (ВЭП).
ВД с сосредоточенной обмоткой на статоре в отечественной литературе назван бесконтактным двигателем постоянного тока (БДПТ), а в англоязычной версии его обозначают как Brushless Direct Current (BLDC).
Многовариантные структуры БДПТ и их анализ
Математическое описание БДПТ в фазовых координатах может быть представлено в виде:

где: uk,ik(Qm), Y0kQm), Mk — мгновенные напряжение, ток, потокосцепление и электромагнитный момент k-ой фазы; rk, Lk — сопротивление и индуктивность k-ой фазы; w, w m — угловая частота напряжения (тока) в фазе и угловая скорость вращения вала двигателя; M, MH — суммарный электромагнитный момент и момент нагрузки на валу двигателя; J, p — момент инерции на валу двигателя и число пар полюсов.
При трапецеидальных зависимостях потокосцепления и, соответственно, прямоугольных зависимостях требуемого тока БДПТ представляет собой систему с дискретно изменяющейся структурой, что приводит к необходимости решения системы уравнений (1) на интервалах, где структура системы остается постоянной, с последующим «сшиванием» решений.
В связи с этим предпочтительным методом анализа БДПТ на базе уравнений (1) является компьютерное моделирование, поскольку в модели могут быть реализованы отмеченные зависимости.
Приблизительные решения могут быть получены на основании различных упрощений, основные из которых следующие:
- описание БДПТ при токовом управлении;
- описание БДПТ при представлении потокосцеплений и токов их первыми гармониками;
- описание БДПТ эквивалентным магнитоэлектрическим двигателем постоянного тока.
Далее описаны структуры БДПТ, соответствующие всем перечисленным методам его представления, разработаны модели, осуществлен их анализ и проведено сравнение полученных результатов. Исследования осуществлены для двигателя, параметры которого приведены в таблице 1.
В дальнейшем многовариантное представление БДПТ рассматривается в составе ВЭП, с релейными регуляторами токов в фазах двигателя и пропорциональным регулятором скорости (K = 50).
Модельное исследование БДПТ в среде MATLAB+Simulink в фазовых координатах по уравнениям (1)
На рис. 2 приведена модель электропривода с БДПТ, построенная по системе уравнений (1). Модель содержит:
- ДПР с формирователем единичных трапецеидальных и прямоугольных функций для управления потокосцеплением и током в каждой фазе БДПТ (блок Position Sensor);
- ограничители и релейные регуляторы токов в фазах двигателя;
- блок Subsystem, моделирующий электромагнитные процессы;
- блок Mechanic, моделирующий электромеханические процессы в двигателе.

Рис. 2. Модель электропривода с БДПТ
Модель ДПР с формирователем единичных трапецеидальных (для формирования потокосцепления) и прямоугольных (для формирования тока) функций приведена на рис. 3а. Прямоугольные единичные импульсы формируются в блоках Subsystem, Subsystem1, Subsystem2, модель одного из них показана на рис. 3б.

Рис. 3. Модель ДПР с формирователем единичных функций:
а) трапецеидальных (для формирования потокосцепления);
б) прямоугольных (для формирования тока)
Выходные сигналы блока ДПР в установившемся режиме для фазы А показаны на рис. 4. Выходные трапецеидальные единичные функции на выходных портах a, b, c в блоке Subsystem (рис. 2), представляющем модель электромагнитной части БДПТ, умножаются на заданное значение потокосцепления. Выходные прямоугольные единичные функции на выходных портах sig, sig1, sig2, будучи умноженные на сигнал с выхода регулятора скорости (рис. 2), являются задающими сигналами на формирование напряжений на фазах двигателя.

Рис. 4. Выходные единичные сигналы на выходе блока Position Sensor
Для формирования токов в фазах двигателя эти сигналы сравниваются с реальными токами на входах релейных регуляторов с гистерезисом, что обеспечивает скользящий режим по току (так называемый «токовый коридор») [1, 6]. В блоке Subsystem, модель которого приведена на рис. 5, реализуются три первых уравнения системы (1). Два последних уравнения системы (1), описывающих электромеханическую часть БДПТ, реализованы в блоке Meсhanic, модель которого показана на рис. 6.

Рис. 5. Модель электромагнитной части БДПТ

Рис. 6. Модель электромеханической части БДПТ
На осциллограммах, приведенных на рис. 7 и 8, представлены переходные процессы по скорости, моменту и токам в фазах БДПТ при пуске электропривода с выходом на насыщение («в большом») и поддержание скорости в режиме холостого хода с последующим набросом момента нагрузки.

Рис. 7. Переходные процессы по моменту и скорости ВЭП с выходом на режим насыщения («в большом»)

Рис. 8. Переходные процессы по токам ВЭП с выходом на режим насыщения («в большом»)
Динамика электропривода в линейной зоне («в малом») представлена переходным процессом по управлению на рис. 9.

Рис. 9. Переходные процессы по скорости и моменту электропривода в линейной зоне («в малом»)
Модельное исследование электропривода в среде MATLAB+Simulink при управлении БДПТ от источника тока
Если сформированные в релейных регуляторах токи в фазах двигателя считать заданными, то математическое описание БДПТ (1) можно упростить и представить в виде:

В этом случае модель электропривода преобразуется к виду, показанному на рис. 10. Электромагнитная часть БДПТ при таком управлении также упрощается, ее модель показана на рис. 11.

Рис. 10. Модель электропривода при управлении БДПТ от источника тока
Переходные и установившиеся процессы в электроприводе показаны на рис. 12 и 13. Сравнивая результаты моделирования электромагнитных и электромеханических процессов «в большом» в строгой и упрощенной модели, следует отметить их достаточную близость. Различие наблюдается лишь в характере пульсаций момента, которая имеет место на фронтах задающих импульсов тока.

Рис. 11. Электромагнитная модель БДПТ при его управлении от источника тока

Рис. 12. Переходные процессы в электроприводе с БДПТ «в большом» при его управлении от источника тока

Рис. 13. Переходные процессы по токам в фазах в электроприводе с БДПТ «в большом» при его управлении от источника тока
В линейной зоне («в малом») (рис. 14) различаются переходные процессы по моменту, т. к. при управлении от источника тока ток выступает как задающий сигнал, что исключает переходный электромагнитный процесс в двигателе.

Рис. 14. Переходные процессы в электроприводе с БДПТ «в малом» при его управлении от источника тока
Модельное исследование электропривода в среде MATLAB+Simulink при представлении потокосцепления и тока БДПТ первой гармоникой
При разложении трапецеидальных (потокосцепления) и прямоугольных (токи) импульсов в ряд Фурье переменные состояния двигателя становятся синусоидальными функциями времени. В этом случае, при учете только первой гармоники в разложении, математическое описание БДПТ осуществляется так же, как для вентильного двигателя во вращающейся системе координат [3]:

где: U1, Id, Iq, Y0 — фазные амплитудные значения переменных состояний; R1, L1 — сопротивление и индуктивность фазы статора; m — число фаз; kai, kaY — коэффициенты амплитуды тока и потокосцепления, равные: kai = 1,11, ka Y = 1,22. Модель вентильного электропривода при представлении потокосцепления и тока БДПТ первой гармоникой, составленной по системе уравнений (3) с аналогичными предыдущему регуляторами тока и скорости, приведена на рис. 15. Результаты моделирования переходного процесса по моменту и скорости «в большом» и «малом» представлены на рис. 16 и 17. Сравнивая представленные результаты с ранее полученными, можно оценить возможность приведенного математического представления БДПТ.

Рис. 15. Модель вентильного электропривода при представлении потокосцепления и тока БДПТ первой гармоникой

Рис. 16. Переходные процессы в электроприводе с БДПТ «в большом» при представлении потокосцепления и тока БДПТ первой гармоникой

Рис. 17. Переходные процессы в электроприводе с БДПТ «в малом» при представлении потокосцепления и тока БДПТ первой гармоникой
Математическое описание БДПТ уравнениями (3) имеет то преимущество, что позволяет найти в явном виде передаточную функцию двигателя по управлению и выявить некоторые качественные свойства динамики двигателя. Передаточная функция двигателя находится при преобразовании уравнений (3) и записывается в виде:

в которой коэффициенты определяются из ниже приведенных выражений:

Уравнения (4, 5) позволяют выявить влияние переменных состояния двигателя на его динамические свойства. Это влияние объясняется зависимостью коэффициента а1 при первой производной от скорости. Производная от скорости, как это видно из уравнений (3), пропорциональна моменту, что свидетельствует о влиянии момента на динамические характеристики двигателя. Еще одним преимуществом математического описания БДПТ (3) является то обстоятельство, что оно позволяет получить замкнутые уравнения для расчета электромагнитных и механических характеристик двигателя в установившемся режиме [3].
Модельное исследование электропривода в среде MATLAB+Simulink заменой БДПТ эквивалентным двигателем постоянного тока
При представлении БДПТ эквивалентным магнитоэлектрическим двигателем постоянного тока (МДПТ) математическое описание последнего имеет вид:

Структурная схема МДПТ, построенная по уравнениям (6), показана на рис. 18.

Рис. 18. Структурная схема магнитоэлектрического двигателя постоянного тока
Параметры этой структурной схемы рассчитаем путем сравнения с математическим описанием при представлении потокосцепления и тока БДПТ первой гармоникой. В этом случае параметры МДПТ определятся из приведенных ниже зависимостей:
![]()
Модель электропривода с эквивалентным МДПТ, c релейным токовым контуром и пропорциональным регулятором скорости, построенная по уравнениям (6), приведена на рис. 19, а аналогичные предыдущим примерам переходные процессы в электроприводе — на рис. 20 и рис. 21.
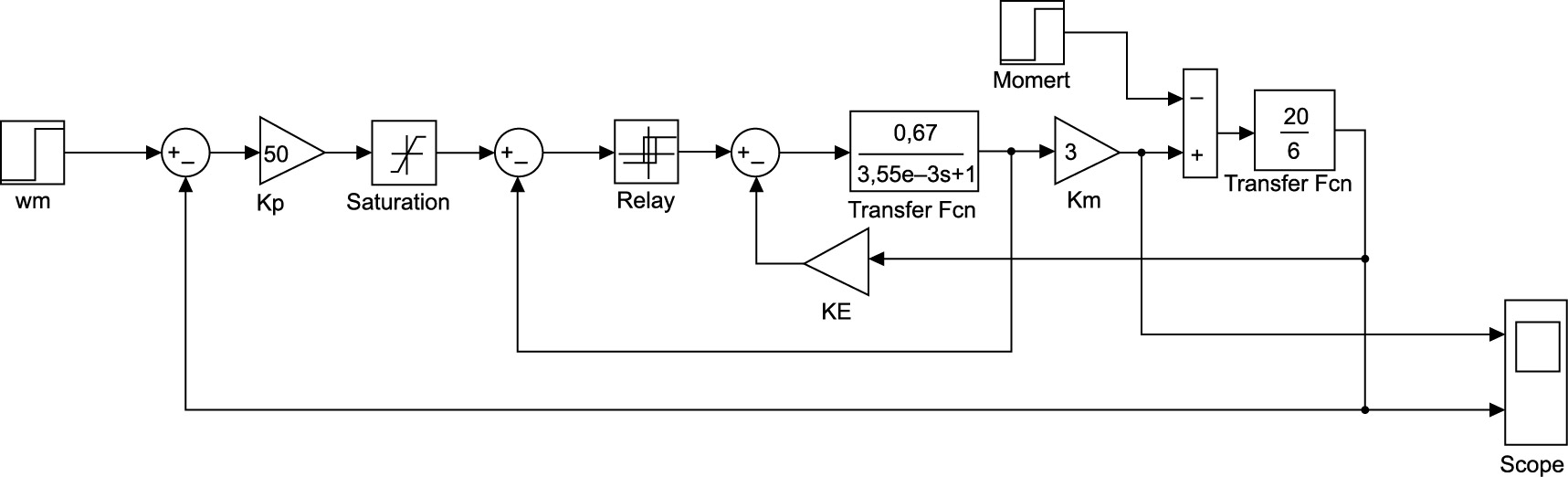
Рис. 19. Модель электропривода с эквивалентным МДПТ

Рис. 20. Переходные процессы в электроприводе с МДПТ «в большом»

Рис. 21. Переходные процессы в электроприводе с МДПТ «в малом»
Математическое представление БДПТ эквивалентным МДПТ в уравнении (6) позволяет получить замкнутые выражения для передаточной функции и электромеханических характеристик двигателя в установившемся режиме [3].
Заключение
Многовариантное моделирование вентильного электропривода показало достаточную адекватность всех рассмотренных вариантов представления БДПТ. При представлении потокосцепления и тока БДПТ первой гармоникой, а также при замене эквивалентным МДПТ удается получить замкнутые выражения для переходных и установившихся процессов в БДПТ и на этой базе исследовать электромеханические процессы и осуществить предварительный структурный и параметрический синтез электропривода. Однако «чистовая доводка» спроектированного электропривода должна осуществляться с использованием строгой модели БДПТ в фазовых координатах.
- Бродовский В. Н., Иванов Е. С. Приводы с частотно-токовым управлением. М.: Энергия, 1974.
- Бормотов А. В. Модульная электрическая машина и мехатронная система на ее основе. Диссертация на соискание ученой степени кандидата технических наук. ФГБОУ ВО СПбГМТУ, 2017.
- Герман-Галкин С. Г. MATLAB+Simulink: проектирование мехатронных систем. СПб: Корона–Век, 2008.
- Дьяконов В. П. Многовариантное моделирование силовых устройств в MATLAB+Simulink // Силовая электроника. 2011. № 1.
- Овчинников И. Е. Вентильные электрические двигатели и привод на их основе (курс лекций). СПб: Корона–Век. 2006.
- Слежановский О. В., Дацковский Л. Х., Кузнецов И. С., Лебедев Е. Д., Тарасенко Л. М. Системы подчиненного регулирования электропривода переменного тока с вентильными преобразователями. М: Энергоатомиздат, 1983.
- Соколовский Г. Г. Электроприводы переменного тока с частотным управлением. М: Академия, 2006.
- Черных И. В. Simulink — среда создания инженерных приложений. М: ДИАЛОГ–МИФИ, 2004.
 5 сентября, 2011
5 сентября, 2011 11 октября, 2007
11 октября, 2007 11 апреля, 2022
11 апреля, 2022