
Школа MATLAB. Урок 17. Динамические режимы работы импульсного повышающего преобразователя
Введение

Рис. 1. Импульсный повышающий преобразователь и электромагнитные процессы в нем
История создания полупроводниковых преобразователей с регулируемым (управляемым) эффектом накопления энергии в реактивных элементах берет свое начало с середины прошлого века. Первыми преобразователями, где осуществлялось регулирование эффекта накопления для получения заданных статических свойств, были автономные инверторы тока с обратным тиристорным мостом и резонансные инверторы [6–9, 11]. Позднее регулирование эффекта накопления использовалось при построении тиристорных широтно-импульсных преобразователей и автономных инверторов напряжения с двухступенчатой коммутацией [3, 5–7, 9].
Основная особенность полупроводниковых преобразователей с регулируемым эффектом накопления заключается в том, что в них всегда присутствуют реактивные элементы с различным видом запасаемой реактивной энергии — кинетической и потенциальной. При этом обмен между накопителями этих энергий (индуктивностью и емкостью) управляется полупроводниковыми ключами. Полупроводниковые элементы преобразователя, работающие в ключевых режимах, обеспечивают разделение во времени процесса накопления энергии в реактивном элементе и процесса отдачи этой энергии. Путем изменения соотношения между длительностью этих двух процессов достигается регулирование эффекта накопления энергии.
Способность полупроводниковых преобразователей с реактивными элементами управлять процессом накопления и отдачи энергии в последнее время широко используется для повышения энергоэффективности вторичных источников питания в электроприводах и компенсаторах неактивных составляющих мощности в электрических сетях [7, 9]. Электромагнитные и энергетические характеристики перечисленных преобразователей в квазиустановившихся режимах исследованы в предыдущих уроках [12]. Эти исследования осуществлены при использовании виртуальных моделей. В виртуальной модели математическое описание объекта (или существенная ее часть) уходит как бы на задний план (уравнения создаются самой инструментальной средой, они не «видны»). Такие виртуальные модели существенно облегчают задачу исследования полупроводниковых систем для опытных специалистов. По сути, саму адекватную виртуальную модель может создать только опытный специалист в соответствующей области. Отмеченная особенность виртуальной модели является недостатком, когда исследование должен осуществить молодой, недостаточно опытный специалист или студент. В этом случае математика, отражающая физику процессов, должна присутствовать, а представлением этой математики в среде MATLAB+Simulink являются структурные модели.
В данной статье исследуется импульсный повышающий регулятор постоянного напряжения (ИПРН), являющийся базовым представителем преобразователя с регулируемым эффектом накопления. В основе математического описания ИПРН используются основные положения теории вентильных систем, предложенные А. А. Булгаковым [2].
Разработка общей теории вентильных каскадов предполагает применение основной идеи метода А. А. Булгакова — выделение непрерывной полезной («гладкой») составляющей тока и напряжения и их использование для анализа как установившихся, так и переходных процессов в системе. Эта полезная составляющая в ИПРН является средней [1].
Схема ИПРН и его схемы замещения на коммутационных интервалах в течение периода показаны на рис.1. На интервале включенного состояния транзистора VT (рис. 1б) накопительная индуктивность и конденсатор отделены друг от друга диодом VD. В индуктивности накапливается энергия от источника питания Ud, а конденсатор отдает энергию в нагрузку.
На интервале выключенного состояния транзистора VT (рис. 1в) накопительная индуктивность отдает энергию в конденсатор и нагрузку.
Алгоритмы управления ИПРН
Для ИПРН используются следующие алгоритмы управления [12]:
- Синхронный, независимый алгоритм управления, когда период коммутации Т задается тактовым генератором импульсов, а длительность включенного состояния транзистора — напряжением управления. Этот алгоритм обозначен как Т_γ.
- Синхронный алгоритм управления с выключением транзистора по заданному току в накопительном дросселе (алгоритм Т_I*max). В этом случае транзистор включается синхронно с тактовым генератором импульсов, задающим период коммутации, а выключается, когда ток в дросселе достигнет заданного максимального значения I*max.
- Синхронный алгоритм управления с включением транзистора по заданному минимальному току в накопительном дросселе (алгоритм I*min_T). В этом случае транзистор выключается синхронно с тактовым генератором импульсов, задающим период коммутации, а включается, когда ток в дросселе достигнет заданного минимального значения I*min.
- Асинхронный алгоритм управления (алгоритм I*d_I*d), который применительно к устройствам силовой электроники часто называют «токовым коридором». Этот алгоритм реализует скользящий режим управления током в накопительном дросселе около заданного среднего значения тока дросселя (I*d). Частота переключения определяется шириной петли гистерезиса в релейном блоке, постоянной времени td = L/r и заданным значением тока I*d.
Импульсный повышающий регулятор постоянного напряжения может работать в двух принципиально различных режимах:
- непрерывного тока в накопительном дросселе;
- прерывистого тока в накопительном дросселе.
В первом режиме ток в дросселе при выключенном транзисторе, замыкаясь через диод, не спадает до нуля, а во втором спадает до нуля.
Преимущество режима непрерывного тока по сравнению с режимом прерывистого тока состоит в том, что высшие гармоники тока в источнике питания выражены достаточно слабо, а пульсации напряжения на выходе незначительны. Это обеспечивает хорошую совместимость ИПРН с источником питания и нагрузкой.
Недостатком режима непрерывного тока по сравнению с режимом прерывистого тока являются повышенные токи и мощности, рассеиваемые в полупроводниковых приборах при переключении. Практические схемы преимущественно проектируются так, чтобы в квазиустановившемся режиме обеспечивался непрерывный ток. В переходных же режимах, как это будет показано ниже, средний («гладкий») ток в дросселе может принимать нулевое значение.
Электромагнитные процессы в схеме при непрерывном токе и любом из рассмотренных выше алгоритмов управления показаны на рис. 1г.
Все дальнейшие исследования проведены для регулятора, имеющего следующие параметры: L = 1 мГн; r = 0,4 Ом; С = 100 мкФ; R = 20 Ом; Ud = 150 В.
Анализ электромагнитных процессов в ИПРН
Характеристики повышающего ИПРН в установившемся режиме работы рассчитаны и приведены в [4].
Переходные процессы в ИПРН возникают при подключении регулятора к источнику питания и при изменении нагрузки. В переходных режимах напряжение на конденсаторе (нагрузке), а равно и на полупроводниковых элементах преобразователя, может существенно превысить напряжение в установившемся режиме. Поэтому исследование динамических процессов является необходимым при проектировании ИПРН.
Математическое описание электромагнитных процессов в ИПРН по «гладкой составляющей» может быть представлено в виде:
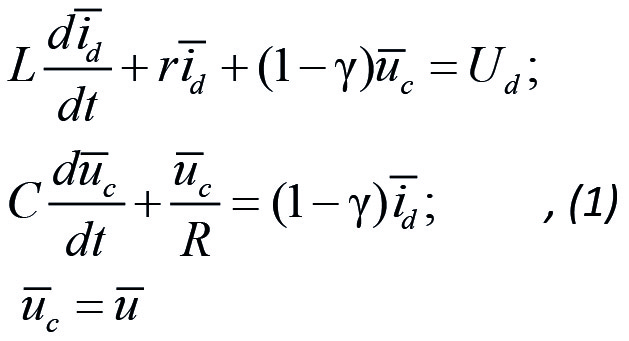
где ![]() ,
, ![]() ,
, ![]() — средний ток в дросселе, среднее напряжение на конденсаторе и нагрузке («гладкие составляющие»), γ — относительное время включенного состояния транзистора; L, r, C, R — параметры ИПРН.
— средний ток в дросселе, среднее напряжение на конденсаторе и нагрузке («гладкие составляющие»), γ — относительное время включенного состояния транзистора; L, r, C, R — параметры ИПРН.
Дифференциальное уравнение относительно среднего напряжения на нагрузке, составленное по уравнениям (1), имеет вид:

Из уравнения (2) можно определить напряжение на конденсаторе в установившемся режиме:

что совпадает с уравнением (1) в [4].
Корни характеристического уравнения, составленного по (2), равны:

Из выражения (4) следует, что корни характеристического уравнения изменяются при изменении γ. При выбранных параметрах регулятора корни характеристического уравнения являются комплексно-сопряженными в диапазоне изменения γ 0–0,93, т. е. практически во всем диапазоне регулирования. Они равны:
p1,2 = –δ±jω, (5)
где δ — коэффициент затухания:

ω — угловая частота собственных колебаний:

Заметим, что коэффициент затухания не зависит от γ, тогда как регулировочная характеристика (уравнение 3) и угловая частота собственных колебаний являются функцией γ. Поэтому повышающий ИПРН при математическом описании по «гладкой составляющей» является существенно нелинейной системой. Для анализа и расчета подобных систем был разработан метод фазовой плоскости [5], а в последующем — аналитический метод, базирующийся на свойствах фазовой траектории [3]. Этот метод положен в основу аналитического расчета перенапряжения в переходных режимах работы ИПРН и построения структурных моделей.
Максимальное напряжение на конденсаторе в переходном режиме находится при использовании дифференциального уравнения (2) для нулевых начальных условий.

где Uc — напряжение на конденсаторе в установившемся режиме, определенное из уравнения (3). На рис. 2 представлены зависимости выходного напряжения регулятора от относительной длительности включения транзистора γ в установившемся и переходном режимах, рассчитанные по уравнениям (3) и (6).

Рис. 2. Зависимости выходного напряжения ИПРН от γ в установившемся и переходном режимах
Максимальное напряжение на конденсаторе в переходных режимах возрастает при увеличении γ и R.
В случае колебательного характера среднего тока отрицательный ток не может протекать через дроссель из-за наличия диода VD (рис. 1). Поэтому при ![]() ≤ 0 математическое описание ИПРН по «гладкой составляющей» запишется в виде:
≤ 0 математическое описание ИПРН по «гладкой составляющей» запишется в виде:

Анализ, представленный выше, позволяет оценить влияние параметров и управления на свойства ИПРН, служит основой для построения структурной модели и проверки ее адекватности.
Исследование динамических свойств ИПРН в разомкнутой системе
Структурная модель для исследований динамических характеристик ИПРН в разомкнутой системе по гладкой составляющей с алгоритмом управления T_γ, составленная по уравнениям (1) и (7), показана на рис. 3. Здесь при ![]() > 0 cигнал на выходе блока Relay равен 1, а при
> 0 cигнал на выходе блока Relay равен 1, а при ![]() ≤ 0 — равен нулю, что обеспечивает изменение структуры системы при переходе от уравнений (1) к уравнениям (7). При этом следует подчеркнуть, что система при любом среднем токе дросселя остается устойчивой, колебательной при
≤ 0 — равен нулю, что обеспечивает изменение структуры системы при переходе от уравнений (1) к уравнениям (7). При этом следует подчеркнуть, что система при любом среднем токе дросселя остается устойчивой, колебательной при ![]() > 0 и апериодической при
> 0 и апериодической при ![]() ≤ 0.
≤ 0.

Рис. 3. Структурная модель ИПРН
На рис. 4, 5 показаны переходные процессы при постоянно подключенной нагрузке (R = 20 Ом) и различной последовательности подключения питания (Ud) и подачи сигнала управления Gamma. В первом случае (рис. 4) сигнал управления (γ = 0,5) подан в момент (t = 0), т. е. одновременно с включением питания. Напряжение на конденсаторе в переходном и установившемся режимах в точности совпадает с теоретическими значениями (рис. 2).

Рис. 4. Электромагнитные переходные процессы в ИПРН при включенной нагрузке
Во втором случае сигнал управления (γ = 0,5) подан в момент (t = 0,01 c) после подключения питания. В этом случае максимальное напряжение на конденсаторе при включении питания определяется из уравнения:

а максимальное напряжение на конденсаторе при подаче сигнала управления на регулятор — из следующего уравнения:

Результаты расчета и моделирования свидетельствуют о том, что при втором способе подключения ИПРН в работу перенапряжение в переходных режимах снижается (рис. 5).

Рис. 5. Электромагнитные переходные процессы в ИПРН при включенной нагрузке
Переходные процессы в ИПРН при включении без нагрузки с последующим при t = 0–0,01 с ее подключением демонстрирует рис. 6, Максимальное напряжение для этого случая рассчитывается по уравнению (6) для R→∞ (при моделировании было принято R = 2000 Ом).

Рис. 6. Электромагнитные переходные процессы при включении ИПРН без нагрузки с последующим ее подключением
Последующее подключение нагрузки при t = 0,015 c вызывает незначительный колебательный процесс. Результаты моделирования для случая, когда нагрузка отключается позже включения ИПРН в работу, показаны на рис. 7.

Рис. 7. Электромагнитные переходные процессы в ИПРН при включении с нагрузкой и последующим отключением нагрузки
Максимальное напряжение при отключении нагрузки в этом случае рассчитывается по уравнению:

в котором

Общий вывод из полученных результатов моделирования состоит в том, что:
- колебательный характер переходного процесса в ИПРН приводит к перенапряжению на выходе и полупроводниковых приборах преобразователя;
- адекватность структурной модели ИПРН подтверждается результатами анализа переходных и установившихся процессов;
- величина перенапряжения зависит от относительной длительности включенного состояния транзистора, от величины сопротивления нагрузки и от последовательности подключения ИПРН в работу;
- для уменьшения перенапряжения в переходных режимах включение ИПРН в работу следует осуществлять в следующей последовательности:
- подключить нагрузку;
- подключить питание ИПРН;
- подать сигнал управления.
Для исключения перенапряжений в динамических режимах работы ИПРН можно попытаться так подобрать параметры регулятора, чтобы корни характеристического уравнения (3) были вещественными, отрицательными и разными. Для этого следует уменьшать индуктивность дросселя и емкость конденсатора, что, как правило, отрицательно влияет на качество выходного напряжения.
Далее исследование ИПРН при перечисленных выше различных алгоритмах управления осуществляется при использовании только структурных схем.
Следует в этой связи подчеркнуть, что структурная модель, составленная с учетом нелинейных свойств схемы, является, по сути, методом математического анализа.
Исследование динамических свойств ИПРН в системе с релейной отрицательной обратной связью по току
Структурная модель ИПРН со скользящим токовым управлением («токовый коридор») приведена на рис. 8.
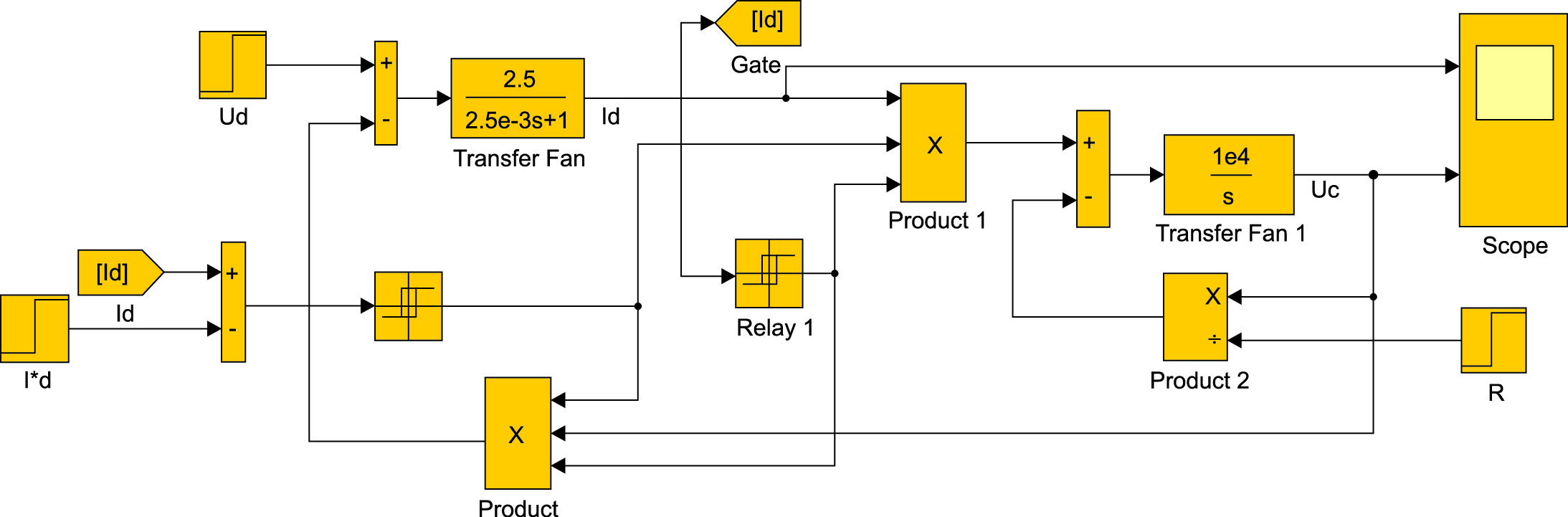
Рис. 8. Структурная модель ИПРН с токовым управлением
Электромагнитные переходные процессы при реализации «токового коридора» в ИПРН приведены на рис. 9, 10. На рис. 9 показаны переходные процессы при постоянно подключенной нагрузке и включении ИПРН в работу — в момент t = 0,04 c.
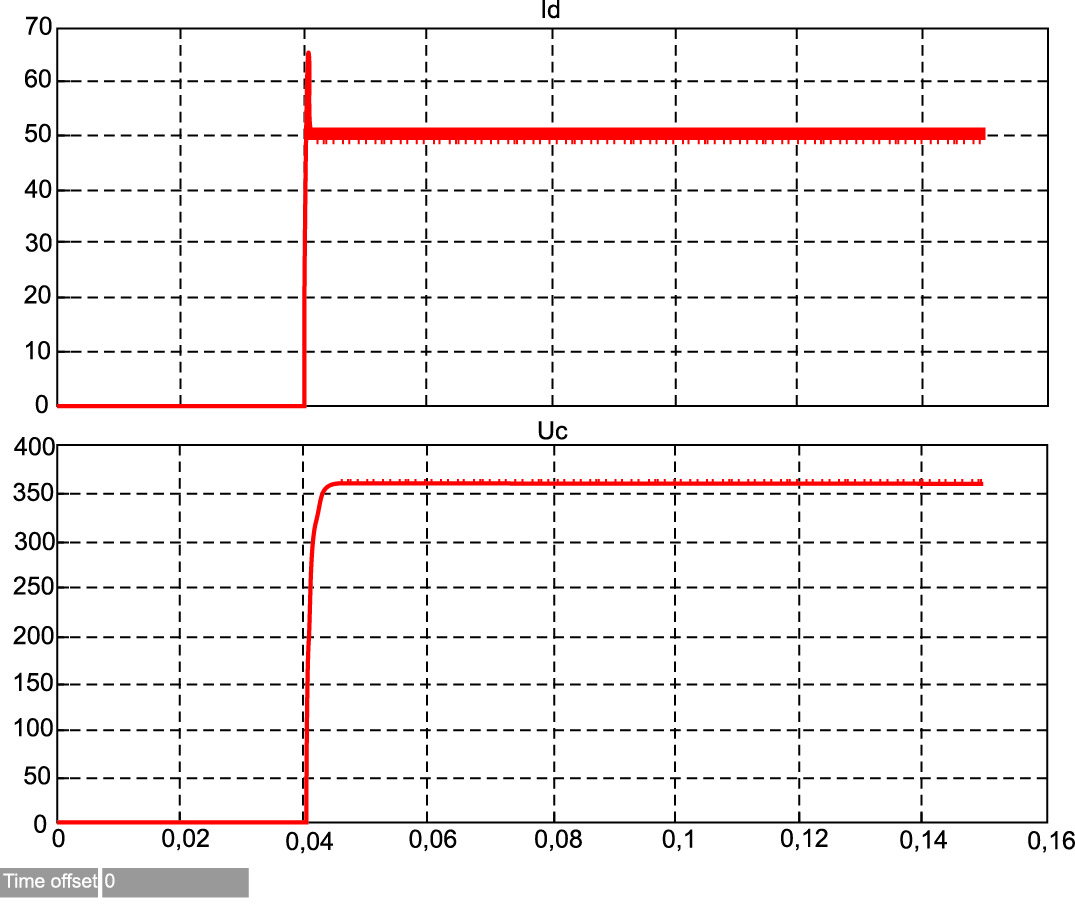
Рис. 9. Электромагнитные переходные процессы в ИПРН при включенной нагрузке и токовом управлении
На рис. 10 показаны переходные электромагнитные процессы в ИПРН без подключенной нагрузки на временном интервале t = 0–0,1 c, с последующим подключением нагрузки в момент t = 0,1 c. Электромагнитные процессы (рис. 10) соответствуют случаю, когда сигнал управления (I*d = 50 A) и питание поданы в момент t = 0,04 c.

Рис. 10. Электромагнитные переходные процессы в ИПРН с токовым управлением
Характерным для рассмотренного случая является рост напряжения на конденсаторе при отключенной нагрузке. Максимальное значение этого напряжения зависит от временной задержки подключения нагрузки и может значительно превышать напряжение питания.
Общий вывод из полученных результатов состоит в том, что токовое управление ИПРН приводит к перенапряжению на выходе и полупроводниковых приборах преобразователя при отсутствии нагрузки.
Для уменьшения перенапряжения в переходных режимах включение ИПРН в работу следует осуществлять при подключенной нагрузке.
Исследование динамических свойств ИПРН в двухконтурной системе
В случае, когда ИПРН используется как стабилизированный источник напряжения, релейный токовый контур, реализующий «токовый коридор», включается как подчиненный внешнему контуру. Во внешнем контуре применяется отрицательная обратная связь по выходному напряжению. В повышающем регуляторе выходное напряжение может быть задано в 1,5–2,5 раза бóльшим, чем напряжение питания. На рис. 11 приведена структурная модель стабилизатора с выходным напряжением 300 В при напряжении питания Ud = 150 B.

Рис. 11. Структурная модель стабилизатора с выходным напряжением 300 В
Во внешнем контуре использован ПИ-регулятор с параметрами KP = 0,1 и KI = 100.
Переходные электромагнитные процессы при подключенной нагрузке показаны на рис. 12.
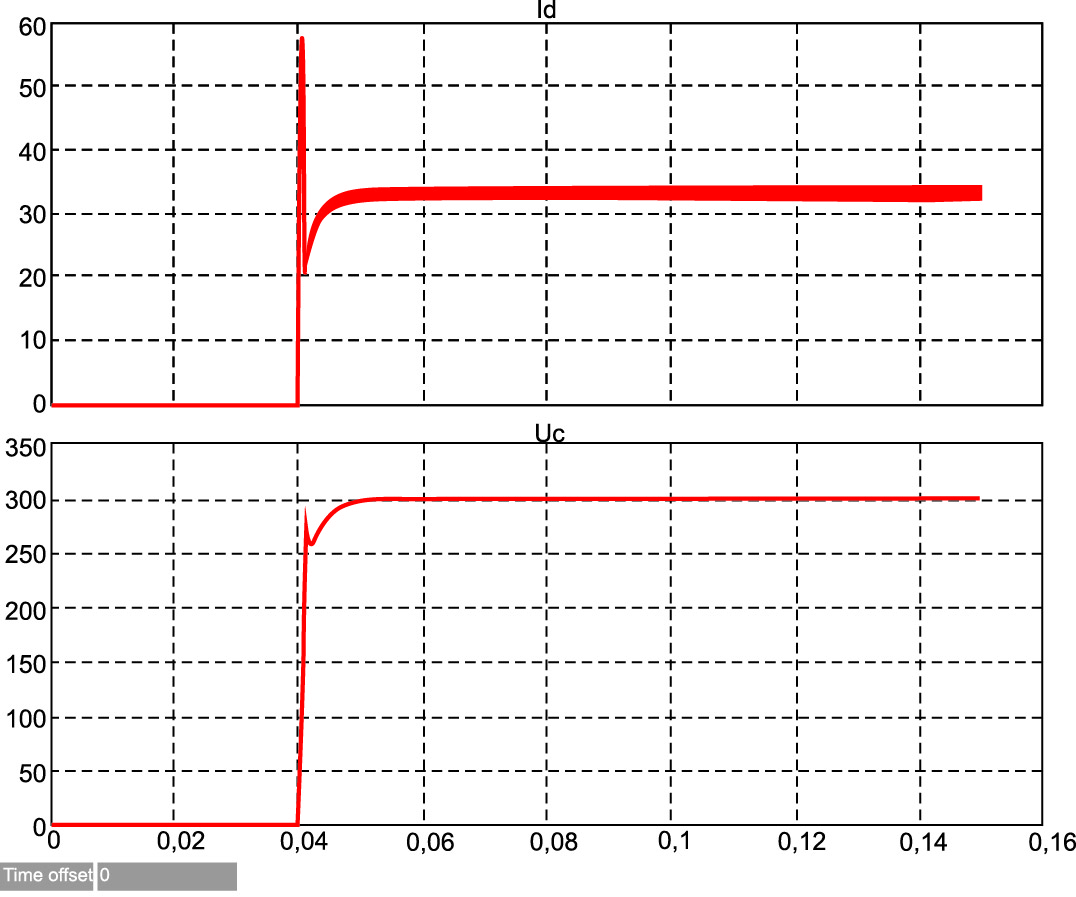
Рис. 12. Переходные электромагнитные процессы стабилизатора при подключенной нагрузке
На рис. 13 показаны переходные электромагнитные процессы без подключенной нагрузки на временном интервале t = 0–0,1 c, с последующим подключением нагрузки в момент t = 0,1 c.

Рис. 13. Переходные электромагнитные процессы при отключенной нагрузке с последующим ее подключением при a = 5000
Перенапряжение на выходе стабилизатора здесь наблюдается при его включении в работу без нагрузки. Значение максимального напряжения на конденсаторе рассчитывается по уравнению (6) для R→∞.
Заключение
Импульсный повышающий регулятор постоянного напряжения является нелинейной динамической системой с дискретно изменяющимися параметрами и регулируемым эффектом накопления энергии. Математическое описание такой системы по «гладкой составляющей» представляется дифференциальным уравнением первого и второго порядка. Уравнение второго порядка, как правило, имеет комплексно-сопряженные корни, что обуславливает колебательность переходного процесса и перенапряжения на полупроводниковых элементах преобразователя при переходных процессах. Кроме того, характер переходных процессов в ИПРН зависит от последовательности включения преобразователя в работу. Всестороннее исследование динамических свойств ИПРН может быть осуществлено с использованием структурных моделей, в которых учтены его как линейные, так и нелинейные свойства.
Любознательный читатель может провести исследование динамических процессов повышающего ИПРН с использованием виртуальных моделей, описанных в [4], и убедиться в аналогичности результатов анализа с приведенными в статье.
- Белов Г., Павлова А., Серебрянников А. Структурные динамические модели и частотный метод синтеза двухконтурных систем управления импульсными преобразователями // Силовая электроника. 2008. № 3.
- Булгаков А. А. Новая теория управляемых выпрямителей. М.: Наука. 1970.
- Герман-Галкин С. Г. Широтно-импульсные преобразователи. Л.: Энергия. 1979.
- Герман-Галкин С. Г. Виртуальные лаборатории устройств силовой электроники в среде MATLAB+Simulink. Урок 12. Исследование импульсного повышающего регулятора постоянного напряжения // Силовая электроника. 2010. № 1.
- Глазенко Т. А. Полупроводниковые преобразователи в электроприводах постоянного тока. Л.: Энергия. 1973.
- Забродин Ю. С. Промышленная электроника. М.: Высшая школа. 1982.
- Зиновьев Г. С. Основы силовой электроники. Ч. 2. Новосибирск. 2000.
- Лабунцов В. А., Ривкин Г. А., Шевченко Г. И. Автономные тиристорные инверторы. М.: Энергия , 1967.
- Розанов Ю. К.: Силовая электроника. М.: Издательский дом МЭИ. 2007.
- Черных И. В. Моделирование электротехнических устройств в MATLAB Sim Power System Simulink. СПб.: ПИТЕР. 2008.
- Чиженко И. М., Руденко В. С., Сенько В. И. Основы преобразовательной техники. М.: Высшая школа. 1974.
- Герман-Галкин С. Г. Школа MATLAB. Моделирование устройств силовой электроники // Силовая электроника. 2005, №1–4; 2006, № 1; 2007, № 3; 2008, № 1; 2009, № 4; 2010, № 1; 2011, № 4; 2012, № 4.
 5 сентября, 2011
5 сентября, 2011 18 октября, 2007
18 октября, 2007 3 марта, 2016
3 марта, 2016