
Динамический расчет двухфазного повышающего преобразователя
В настоящее время разработано множество методов синтеза КУ. Наибольшее распространение в инженерной практике получили графо-аналитические методы, основанные на построении логарифмических частотных характеристик разомкнутой системы. При этом используются косвенные оценки качества переходного процесса (не требующие решения системы дифференциальных уравнений), такие как запас по фазе, запас по модулю, колебательность, частота среза, которые можно непосредственно определить по частотным характеристикам [1, 2, 6]. К другой группе относятся аналитические методы синтеза. При их использовании определяется выражение, связывающее показатель качества системы с параметрами КУ, и определяются значения параметров, соответствующих экстремальному значению функции. К этой группе относятся корневые методы [3, 4].
В настоящей статье рассматривается применение корневого метода для синтеза параметров ПИ-регуляторов для двухфазного повышающего конвертера (рис. 1) с параметрами L1 = L2 = 60 мкГн; С = 410 мкФ; Rн = 1,9 Ом; U = 175 B; γ = tи/T = 0,253.

Рис. 1. Двухфазный повышающий преобразователь:
а) расчетная схема;
б) временные диаграммы работы
Определим передаточную функцию конвертера с обратной связью по напряжению, используя кривую разгона. Для построения кривой разгона выполним имитационное моделирование в MATLAB + Simulink режима работы преобразователя. На рис. 2 показана нормированная кривая разгона напряжения нагрузки Uн* = Uн/Uн.уст.

Рис. 2. Нормированная кривая разгона напряжения нагрузки
По кривой разгона получена передаточная функция конвертера в виде колебательного звена:

где Т = 1,502×10-4 с; ξ = 0,1186; К0 = 0,2593×108; а1 = 0,1579×104; а0 = 0,443×108.
Интервалом tз, на котором проявляется наличие не минимально фазового звена, пренебрежем в связи с его малостью по сравнению с постоянной времени Т.
Передаточная функция разомкнутой системы с ПИ-регулятором:

Передаточная функция замкнутой системы относительно ошибки имеет вид:

Переходный процесс в системе автоматического регулирования зависит от нулей и полюсов передаточной функции, но наиболее сильное влияние оказывают полюса — корни характеристического уравнения.
В устойчивой системе переходный процесс распадается на затухающие апериодические и колебательные составляющие. Первые определяются действительными корнями характеристического уравнения, а вторые — парами сопряженных комплексных корней. В качестве корневых показателей используют степень устойчивости и колебательность (степень колебательности) [3].
Степень устойчивости — это мера удаления системы от границы устойчивости, которой в комплексной p-плоскости является мнимая ось. На рис. 3а показано расположение корней, при котором ближайшим к мнимой оси является действительный корень. В равной мере это может быть и пара сопряженных комплексных корней (рис. 3б). Такие корни называются доминирующими. Степень устойчивости η = min(–Reλ) характеризует быстродействие системы. Чем ближе корни к мнимой оси, тем длительнее переходный процесс.

Рис. 3. Расположение корней характеристического уравнения (показателей степеней устойчивости):
а) действительных;
б) сопряженных комплексных;
в) отношение соседних максимумов колебательной составляющей
Колебательность колебательной составляющей переходного процесса определяется отношением соседних максимумов (рис. 3в):

Следовательно, мерой колебательности является отношение μ = β/|α|. Чем оно больше, тем больше колебательность составляющей переходного процесса. Изменяя значение β, можно обеспечить требуемое перерегулирование, колебательность и степень колебательности.
Параметры ПИ-регулятора будут оптимальными, если все корни характеристического уравнения:
Нз(р) = р3 + а1р2 + (а0 + К0Кп)р + К0Ки
будут находиться на прямой в левой полуплоскости, параллельной мнимой оси и отстоящей от нее на расстоянии a. Расстояние a является оптимальной степенью устойчивости и характеризует быстродействие системы [3].
Преобразуем многочлен согласно теореме Виета:
р3 + а1р2 + (а0 + К0Кп)р + К0Ки = (р + α)[(р + α)2 + β2] = р3 + 3αр2 + (3α2 + β2)р + α(α2+ β2).
Сравниваем коэффициенты при одинаковых степенях р:
3α = а1; α = а1/3 = (1,579×103)/3 = 0,526×103;
α2 = 0,277×106.
3α2 + β2 = а0 + К0Кп; a(a2 + β2) = К0Ки; 3 × 0,277×106 + β2 = 0,443×108 + К0Кп;
β2 = –0,831×106 + 0,443×108 + К0Кп = 43,469×106 + К0Кп;
β2min = 43,469×106; βmin = 6,59×103.
Колебательность процесса не может быть меньше
μmin = βmin/α = 12,59.
Принимаем м = 7×103 и, следовательно, получим:
μ = β/α = 7×103/0,526×103 = 13,3.
Коэффициент усиления регулятора:

Проверим качество переходного процесса. Запишем характеристическое уравнение замкнутой системы:
Нз(р) = р3 + а1р2 + (а0 + К0Кп)р + К0Ки = р3 + 1,55×103р2 + 49,8×106р + 25,58×109
и найдем его корни
р1 = –526,4; р2,3 = –526,4 ± 7 000j.
Все корни характеристического уравнения замкнутой системы находятся на прямой, параллельной мнимой оси, поэтому можно считать параметры ПИ-регулятора напряжения нагрузки оптимальными [3].
Рассмотренная методика оценки качества переходных процессов по расположению корней характеристического уравнения, т. е. полюсов передаточной функции, в комплексной р-плоскости применима только для систем, передаточные функции которых не имеют нулей. В общем случае, когда передаточная функция имеет и нули, их необходимо учитывать. Оценка качества только по полюсам передаточной функции в этом случае может дать ошибку, причем в любую сторону, т. е. переходный процесс может быть как лучше, так и хуже [2].
Для оценки влияния коэффициента β на перерегулирование и колебательность определим переходные процессы при различных β при подаче единичного скачка в замкнутых системах с ПИ-регуляторами (рис. 4).
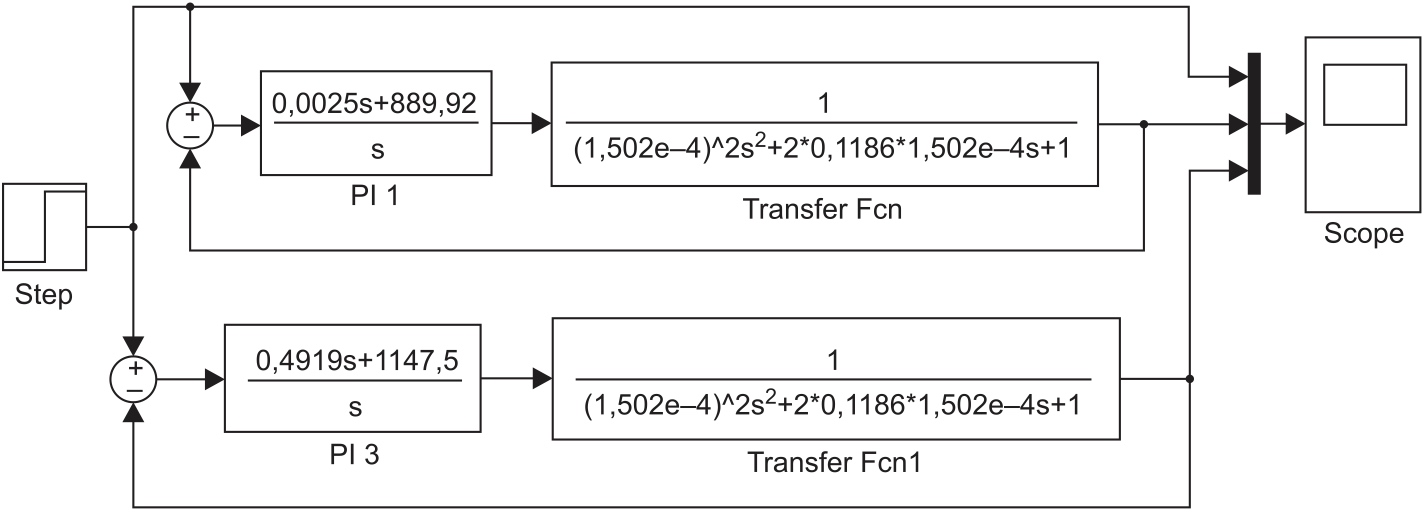
Рис. 4. Моделирование переходных процессов в замкнутой системе при различных значениях коэффициента β
На рис. 5 приведены переходные процессы, а в таблице 1 — полученные значения перерегулирования δ и времени регулирования.

Рис. 5. Кривые разгона системы, состоящей из колебательного звена и ПИ-регулятора для двух значений коэффициента β
Из переходных процессов (рис. 5) и таблицы 1 следует, что увеличение β приводит к увеличению колебательности, а так как амплитуда колебаний возрастает, то, в свою очередь, приводит к увеличению времени регулирования и росту перерегулирования. Увеличение коэффициента усиления Kп более чем в 500 раз и коэффициента Kи в 1,8 раза не привело к потере устойчивости регулирования.
Интервал tз на рис. 2 свидетельствует о том, что в передаточной функции объекта управления имеется не минимально фазовое звено. C его учетом на основе [5] получена передаточная функция повышающего конвертера по управляющему воздействию с учетом сопротивления нагрузки Rн и сопротивления потерь конденсатора rC:

где
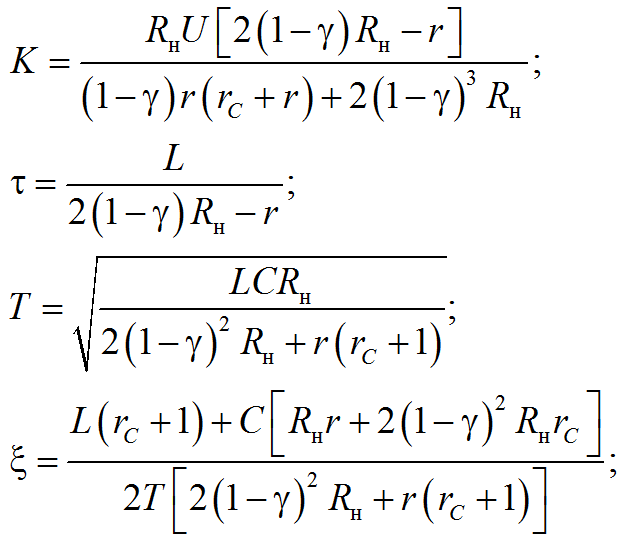
r — активное сопротивление дросселя.
Достоверность (4) проверена сравнением переходных процессов, полученных на Simulink-модели конвертера, с системой управления, замкнутой по напряжению нагрузки (рис. 6).

Рис. 6. Модель двухфазного повышающего конвертера с системой управления, замкнутой по напряжению нагрузки, в MATLAB + Simulink:
а) силовая часть преобразователя;
б) система управления
На рис. 6а система управления показана в виде блока Subsystem, на вход UH которого подается напряжение нагрузки, измеряемое мультиметром Multimeter, а с выходов Out1 и Out2 снимаются сигналы управления на включение и выключение силовых транзисторов IGBT1 и IGBT2. На рис. 7 приведены соответствующие нормированные кривые переходных процессов.

Рис. 7. Нормированные кривые разгона повышающего конвертера с системой управления, замкнутой по напряжению нагрузки, для b = 7,5×103:
1 — использование передаточной функции (4);
2 — имитационное моделирование
На рис. 8 приведены амплитудно-фазовые характеристики (АФХ) для разомкнутой системы с передаточной функцией (4) и ПИ-регулятором для различных значений параметров регулятора.

Рис. 8. АФХ системы с передаточной функцией (4) и ПИ-регуляторами:
1 — Kп = 1,45 и Kи = 1650;
2 — Kп = 2 и Kи = 1650; 3 — Kп = 1,45 и Kи = 2300
Учет не минимально фазового звена (модель (4)) привел к тому, что область устойчивой работы по сравнению с моделированием колебательным звеном (1) сузилась. При Kп = 1,45 и Kи = 2300, а также при Kп = 2 и Kи = 1650 точка с координатой (–1; 0) находится внутри АФХ. В то же время при использовании модели в виде колебательного звена и ПИ-регулятора с Kп = 1,45 система теряет устойчивость только при Kи = 5000.
На рис. 9 приведены переходные процессы, полученные имитационным моделированием работы конвертера с системой управления, замкнутой по напряжению нагрузки, а в таблице 1 с индексами «эксп» — соответствующие величины времени регулирования и перерегулирования.

Рис. 9.
а) Имитационное моделирование разгона повышающего конвертера с системой управления, замкнутой по напряжению нагрузки, для b = 6,6×103 и 7,5×103;
б) переходный процесс на выходе конвертера при b = 9×103
По сравнению с вариантом моделирования конвертера передаточной функцией колебательного звена, диапазон устойчивой работы также уменьшился. При β = 8,5×103 перерегулирование превышает 19%, а при β = 9×103 система регулирования становится неустойчивой (рис. 9б).
Следовательно, оценку качества регулирования необходимо выполнять по Simulink-модели конвертера, а параметры ПИ-регулятора можно определять по упрощенному представлению конвертера колебательным звеном (1).
На рис. 10 приведены нагрузочные характеристики Uн = f(Iн) для разомкнутой системы и для системы с обратной связью по напряжению. Характеристика замкнутой системы более жесткая.

Рис. 10. Нагрузочные характеристики для разомкнутой системы и для системы с обратной связью по напряжению нагрузки
В двухконтурной системе управления внутренним контуром может служить регулятор тока дросселей, а внешним контуром является регулятор напряжения нагрузки. Ток id является суммой токов дросселей, поэтому определим передаточную функцию двухфазного повышающего конвертера по току id, потребляемому от источника.
На рис. 11 приведена экспериментальная кривая разгона тока id преобразователя, полученная моделированием в MATLAB + Simulink.

Рис. 11. Нормированная кривая разгона входного тока id
По виду кривой разгона можно предположить возможность моделирования конвертера по току, потребляемому от источника, передаточной функцией колебательного звена. Для принятых выше исходных данных по кривой разгона и по соотношениям [7]
Т = 1/√(ω12 + s2) и ξ = σТ,
где ω1 = 2π/(t4–t1); σ = ln(A1/A2)/(t4–t1) (рис. 3в) получены следующие параметры колебательного звена:
T = 1,4752×10-4; ξ = 0,1223.
На рис. 12 показана аппроксимация экспериментальной кривой разгона тока, потребляемого от источника, кривой разгона колебательного звена (кривая 2). Хорошо видно, что передаточная функция двухфазного повышающего конвертера по току id кроме колебательного содержит еще и форсирующее звено. Таким образом, силовую часть преобразователя более точно можно моделировать передаточной функцией:


Рис. 12. Моделирование кривой разгона тока, потребляемого от источника:
1 — экспериментальная кривая разгона;
2 — моделирование колебательным звеном;
3 — модель в виде передаточной функции (5)
Постоянная времени форсирующего звена была определена по значению производной в начале кривой разгона:
τ = (Δh/Δt)T2 = 4,57 × 10-4.
Результаты моделирования экспериментальной кривой разгона, с использованием передаточной функции (5), также приведены на рис. 12. Модельная кривая, полученная с использованием формулы (5), практически сливается с экспериментальной.
При моделировании конвертера с обратной связью по току, потребляемому от источника, колебательным звеном параметры ПИ-регулятора, полученные корневым методом по приведенным выше соотношениям, будут следующими:
α = 552,693; β = 7×103; Кп = 0,0485; Ки = 333,166.
Корни характеристического уравнения системы, замкнутой по току (р1 = –552,7; р2,3 = 552,7±7000j), находятся на прямой, параллельной мнимой оси комплексной р-плоскости, поэтому можно считать параметры ПИ-регулятора оптимальными.
На рис. 13 показаны кривые разгона, полученные с использованием модели преобразователя в виде колебательного звена, для двух значений коэффициента b, а в таблице 2 приведены значения перерегулирования, колебательности и времени регулирования для различных параметров ПИ-регулятора.

Рис. 13. Кривые разгона тока, потребляемого от источника, при представлении конвертера колебательным звеном с различными ПИ-регуляторами
Увеличение значения коэффициента колебательности b в системе, замкнутой по току, приводит к уменьшению времени регулирования, несмотря на увеличение колебательности. Наличие форсирующего звена в объекте управления улучшает переходный процесс, перерегулирование снижается.
На рис. 14 приведены переходные процессы в системе с ПИ-регулятором, полученные моделированием конвертера в MATLAB + Simulink. Результаты моделирования показывают, что параметры регулятора, синтезированные корневым методом, для управления объектом, представленным колебательным звеном, можно использовать для регулирования процессов в конвертере, передаточная функция (5) которого, кроме колебательного, содержит еще и форсирующее звено.

Рис. 14. Переходные процессы в повышающем конвертере с системой управления, замкнутой по току, потребляемому от источника
В структурной схеме подчиненного регулирования (рис. 15) объект вместе с регулятором тока может быть представлен новым объектом регулирования с передаточной функцией замкнутой системы с ПИ-регулятором тока.

Рис. 15. Структурная схема двухконтурной системы управления
Нормированная кривая разгона напряжения нагрузки при изменении сигнала управления от 6 до 7,5 В приведена на рис. 16. При этом напряжение нагрузки изменилось от 205,6 до 229,7 В.

Рис. 16. Нормированная кривая разгона напряжения нагрузки конвертера в системе, замкнутой по току id (синяя линия), ее аппроксимация кривой разгона звена первого порядка (пунктир) и по передаточной функции (6) (красная линия)
АФХ и частотные характеристики, построенные по кривой разгона напряжения нагрузки в системе, замкнутой по току id, приведены на рис. 17 и 18 соответственно. Они свидетельствуют о том, что передаточная функция нового объекта управления имеет высокий порядок. По этим характеристикам графоаналитическим методом можно определить параметры регулятора напряжения в системе подчиненного регулирования [2, 6].

Рис. 17. АФХ конвертера по напряжению нагрузки в системе, замкнутой по току id (β = 10)

Рис. 18. Частотные характеристики конвертера по напряжению нагрузки в системе, замкнутой по току id (β = 10)
Определим передаточную функцию объекта управления по амплитудно-частотной характеристике. С этой целью аппроксимируем ее прямыми линиями, проводя их с типовыми наклонами. При такой аппроксимации передаточная функция будет содержать два инерционных, форсирующее и колебательное звенья:

По точкам излома определим соответствующие сопрягающие частоты, а по максимуму выброса АФХ найдем степень колебательности [6]. Получим следующие значения параметров:
Тф = 0,92×103 с; Та = 5,9×10-3 с; Тк = 0,8×10-4 с; ξ = 0,45; Тв = 0,014×10-3 с.
Сравнение кривой переходного процесса, полученной при использовании модели конвертера в виде передаточной функции (6), с экспериментальной кривой (рис. 16, синяя линия) выявило расхождение. Поэтому параметры звеньев, составляющих (6), были скорректированы и в результате получены следующие значения:
Тф = 0,97×103 с; Та = 3,8×10-3 с; Тк = 8,36×10-4 с; ξ = 0,55; Тв = 0,025×10-3 с.
Кривая переходного процесса при моделировании конвертера передаточной функцией (6) со скорректированными параметрами звеньев (рис. 16, красная линия) достаточно близка к экспериментальной кривой. На рис. 17 в сравнении с АФХ конвертера, построенной по экспериментальной кривой разгона, приведена частотная характеристика, полученная по модели (6). Характеристики являются достаточно близкими. Расчет параметров ПИ-регулятора корневым методом при моделировании конвертера передаточной функцией (6) требует использования характеристического уравнения пятого порядка, что является достаточно трудоемкой задачей. Поэтому выполним синтез регулятора в MATLAB + Simulink. Используем блок Signal Constraint библиотеки Simulink Design Optimization. В результате получим следующие значения коэффициентов ПИ-регулятора:
Kп = 2,2; Kи = 900.
Нормированная кривая переходного процесса изменения напряжения нагрузки конвертера для параметров ПИ-регулятора внешнего контура системы подчиненного управления, рассчитанных с помощью блока Signal Constraint, приведена на рис. 19 (кривая 3). Перерегулирование d = 2%, время регулирования tp = 6,3 мс.
По кривой разгона напряжения нагрузки конвертера в системе, замкнутой по току id (рис. 16), можно предположить, что в более простом виде новый объект управления можно представить инерционным звеном первого порядка с запаздыванием. По нормированной кривой разгона постоянную времени инерционного звена определим на уровне 0,63 от установившегося значения Т = 2,9мс.
Кривая разгона по напряжению нового объекта при моделировании его звеном первого порядка с T=2,9 мс и запаздыванием τ=0,05 мс показана на рис. 16 пунктиром.
Пренебрегая запаздыванием, запишем передаточную функцию разомкнутой системы с ПИ-регулятором:

где а1 = 0,345×103; К0 = Коу/Т = 1,09/2,9×10-3 = 0,375×103.
Передаточная функция замкнутой системы по ошибке:

Характеристический многочлен
Н(р) = р2 + (а1 + К0Кп)р + К0Ки
по теореме Виета представим в виде:
р2 + (а1 + К0Кп)р + К0Ки = р2 + 2αр + α2 + β2.
Сравнив коэффициенты при одинаковых степенях р, получим:
2α = а1 + К0Кп;
α2 + β2 = К0Ки.
В двух уравнениях — четыре неизвестных. Зададимся отношением между α и β, исходя из времени регулирования tp и перерегулирования δ. Положим tp = 6 мс из соображения tp ≈ 2Т. Исходя из того, что tp определяется временем вхождения в 5%-ю трубку, получим:

Поскольку перерегулирование δ = е-π/μ, а μ = β/|α|, то для перерегулирования δ = 5% будем иметь β/α = 1,048. Тогда:
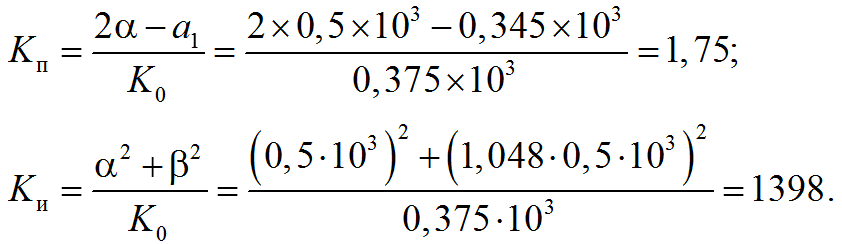
Нормированная кривая переходного процесса изменения напряжения нагрузки для рассчитанных параметров ПИ-регулятора внешнего контура системы подчиненного управления приведена на рис. 19 (кривая 1). Перерегулирование δ = 7,65%, время регулирования tp = 10,2 мс.
Если предположить, что корни характеристического уравнения замкнутой системы вещественные, то β будет равно нулю, и интегральный коэффициент регулятора примет следующее значение:

Нормированная кривая переходного процесса изменения напряжения нагрузки для случая β = 0 приведена на рис. 19 (кривая 2). Перерегулирование δ = 1,04%, время регулирования tp = 8,1 мс.

Рис. 19. Нормированные кривые переходных процессов по напряжению нагрузки в системе подчиненного регулирования:
1 — Kп = 1,57, Kи = 1399;
2 — Kп = 1,57, Kи = 666;
3 — Kп =2,2, Kи = 900
Нагрузочные характеристики для системы подчиненного регулирования представлены на рис. 20. На характеристике два участка: участок стабилизации напряжения нагрузки и участок ограничения тока. Ток нагрузки ограничивается только до момента, когда напряжение нагрузки станет равным напряжению питания.

Рис. 20. Характеристики конвертера с системой подчиненного регулирования:
-o- — нагрузочная UН = f(IН);
-×- — UН = f(Id)
Выводы
- Передаточные функции преобразователя, полученные по кривым разгона, могут быть использованы для синтеза параметров регулятора.
- Параметрический синтез коэффициентов регулятора можно проводить по усредненным моделям конвертера корневым методом.
- Оценку качества регулирования необходимо определять не по передаточной функции, а по Simulink-модели конвертера.
- Белов Г., Серебрянников А. Синтез одноконтурной системы управления двухтактным импульсным преобразователем // Силовая электроника. 2013. № 4.
- Теория автоматического управления: под ред. А.В. Нетушила. М.: Высш. шк. 1976.
- Ким Д. П. Теория автоматического управления. Т. 1. Линейные системы. М.: Физматгиз. 2003.
- Удерман Э. Г. Метод корневого годографа в теории автоматических систем. М.: Наука. 1972.
- Белов Г. А., Павлова А. А., Серебрянников А. В. Динамические модели силовой части двухфазного повышающего импульсного преобразователя / Динамика нелинейных дискретных электротехнических и электронных систем: материалы 8-й Всерос. науч.-техн. конф. Чебоксары: изд-во Чуваш. ун-та. 2009.
- Топчеев Ю. И., Цыпляков А. П. Задачник по теории автоматического регулирования. М.: Машиностроение. 1977.
- Гольдфарб Л. С., Балтрушевич А. В., Нетушил А. В. и др. Теория автоматического управления. М.: Высш. шк. 1976.
 17 сентября, 2020
17 сентября, 2020 1 июля, 2015
1 июля, 2015