
Импульсный преобразователь напряжения постоянного тока по схеме Чука
Введение
Импульсный преобразователь напряжения постоянного тока (ИПНПТ) по схеме Чука [1, 2, 3] (рис. 1а) инвертирует входное напряжение и изменяет его величину в обе стороны подобно известному инвертирующему ИПНПТ. В отечественной литературе ИПНПТ Чука не уделено достаточного внимания, несмотря на многие его декларируемые достоинства. Задачей данной публикации является анализ свойств ИПНПТ Чука и их сравнение со свойствами известного инвертирующего ИПНПТ.

Рис. 1. Преобразователь Чука:
а) принципиальная схема;
б) расчетная схема
Математическая модель преобразователя Чука
В данной статье свойства ИПНПТ Чука анализируются на основе его предельной непрерывной модели. Предельная непрерывная модель отличается от усредненной тем, что получена строгим математическим методом — предельным переходом по периоду переключений, стремящемуся к нулю (T→0). Модель соответствует непрерывной системе с полностью отсутствующими пульсациями фазовых координат [4]. При достаточно малом Tо свойствах преобразователя можно судить по его предельной непрерывной модели.
При построении модели принимаем обычные допущения: ПТ и VD полагаются идеальными, рассматривается режим непрерывного тока. Это позволяет в дальнейшем рассматривать эквивалентную схему преобразователя, представленную на рис. 1б.
ИПНПТ Чука, подобно другим ИПНПТ, относится к классу систем с периодическим высокочастотным изменением структуры. Изменение структуры осуществляет ключ К. Структура преобразователя Чука при положении ключа К «1» в течение первой части периода 0<t<τ = γT представлена на рис. 2а, а при положении ключа К «2» в течение второй части периода γT = τ<t<T представлена на рис. 2б.
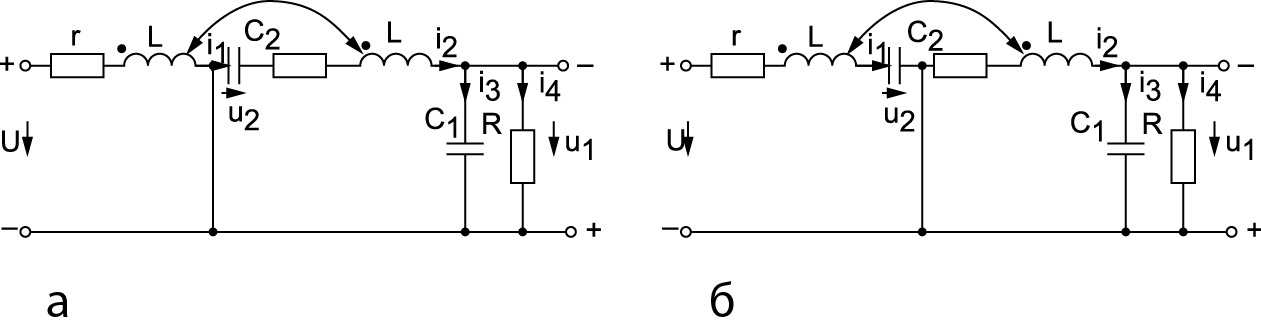
Рис. 2. Расчетная схема преобразователя Чука:
а) при положении ключа К «1»;
б) при положении ключа К «2»
Обе схемы содержат четыре ветви и два узла, что требует для описания каждой схемы четырех уравнений: одно по I закону Кирхгофа и три по II закону Кирхгофа. Уравнения для схем, приведенных на рис. 2а и рис. 2б:

Состояние схемы в фазовом пространстве {Х} определяют четыре координаты: Х = [i1, i2, u1, u2]Т.
Разрешив первые два уравнения систем (1) и (2) относительно di1/dt и di2/dt и учтя уравнения конденсаторов С1du1/dt = i3, С2du2/dt = i2 в первой части периода и С1du1/dt = i3, С2du2/dt = i1 во второй части периода, приводим системы уравнений (1) и (2) к форме Коши:

где D = L2–M2.
В векторно-матричной форме:


Предельная непрерывная модель преобразователя Чука согласно [4] имеет вид:
![]()
где

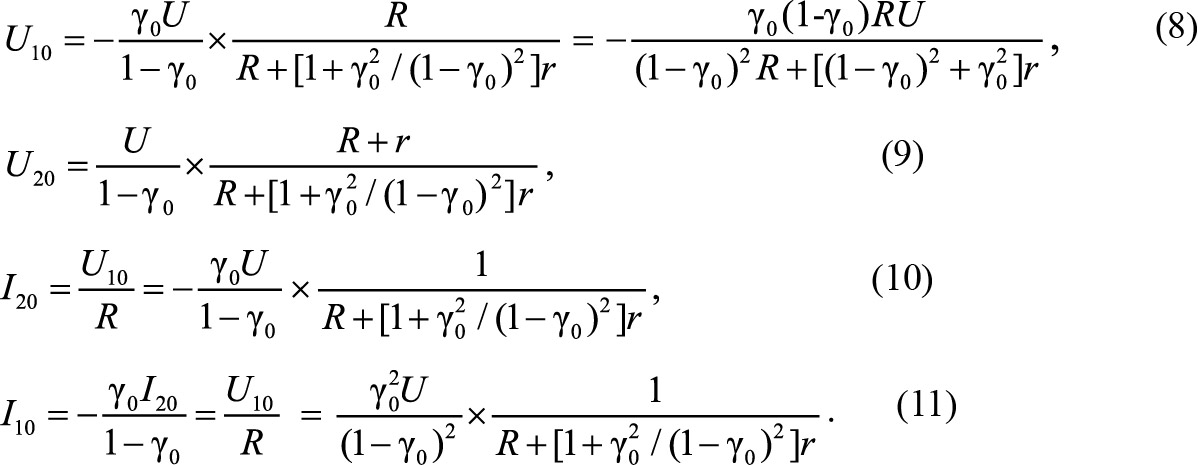
В стационарном режиме при U = const, γ = γ0:
![]()
где
Статическая характеристика преобразователя Чука U10 = f(γ10) при крайних значениях γ10 (0 и 1) принимает нулевое значение
(U10 = 0). Исследование на экстремум дает единственную стационарную точку характеристики
![]()
соответствующую максимуму величины выходного напряжения:

Оценка пульсаций токов и напряжений в преобразователе Чука
Для упрощения получения оценки пренебрежем потерями в дросселе. С учетом допущения схемы рис. 2а и 2б описываются соответственно системами уравнений:

Подставляя в уравнения (15) и (16) токи и напряжения в виде суммы постоянной и пульсирующей составляющих
![]()
где

и пренебрегая в правых частях всех уравнений, кроме третьего, пульсирующими составляющими, получаем из уравнений (14) и (15) соответственно:

Пренебрегая в третьих уравнениях систем (16) и (17) членом du1/RC1, что приведет к увеличению оценки размаха пульсаций напряжения u1 и даст некоторый запас при расчетах, получаем размахи пульсаций:

Относительная величина размаха пульсаций выходного напряжения

уменьшается с увеличением γ0.
Анализ полученных оценок пульсаций показывает, что, с точки зрения сглаживания пульсаций, желательно иметь отрицательную взаимоиндуктивность обмоток дросселя. Особенно существенный выигрыш имеет место при M ≈ –L. Так, при M = –0,9L имеем выигрыш по пульсациям (кроме Du2) в (L–M)/(L+M) = 19 раз.
Рассчитанные по формулам (18) размахи пульсаций для параметров схемы Чука U = 100 В, R = 100 Ом, L = 0,01 Гн, M = 0,009 Гн, C1 = C2 = 10–5 Ф, γ = 0,4, T = 10–5c представлены в таблице 1.
|
|
∆i1, А |
∆i2, А |
∆u1, В |
∆u2, В |
|
M = –0,009 Гн |
21,2×10–3 |
21,2×10–3 |
2,63×10–3 |
267×10–3 |
|
M = +0,009 Гн |
400×10–3 |
400×10–3 |
50,5×10–3 |
267×10–3 |
Для проверки полученных результатов в системе MATLAB v.6.5 + Simulink v.5 по системам уравнений (3) и (4), описывающим преобразователь Чука в первой и во второй части периода переключений соответственно, построена его математическая модель, представленная на рис. 3.

Рис. 3. Математическая модель преобразователя Чука в системе MATLAB + Simulink
Моделирование переключений структуры преобразователя осуществляется с помощью подсистемы Subsystem и блоков умножения Product. Подсистема Subsystem на рис. 3 изображена в пунктирной рамке. Основным ее элементом является генератор пилообразного сигнала Repeating Sequence с частотой, равной частоте переключений, и амплитудой, равной 1. Релейные элементы Relay вырабатывают прямоугольные импульсы длительностью γT и (1–γ)T.
Определение пульсаций в построенной модели дало практически полное (до третьей значащей цифры) совпадение с оценочными значениями.
Сравнение схемы Чука с инвертирующим ИПНПТ
Известная схема инвертирующего преобразователя представлена на рис. 4а. При тех же допущениях (ПТ и VD полагаются идеальными, рассматривается режим непрерывного тока) можно рассматривать эквивалентную схему преобразователя, представленную на рис. 4б.

Рис. 4. Схемы инвертирующего преобразователя:
а) принципиальная;
б) расчетная
В течение первой части периода переключений (ключ К в положении «1», 0<t<τ = γT), согласно эквивалентной схеме рис. 5а, преобразователь описывается системой дифференциальных уравнений


Рис. 5. Расчетная схема инвертирующего преобразователя:
а) при положении ключа К «1»;
б) при положении ключа К «2»
или в векторно-матричной форме:

В течение второй части периода переключений (ключ К в положении «2», γT = τ<t<T), согласно эквивалентной схеме рис. 5б, преобразователь описывается системой дифференциальных уравнений

или в векторно-матричной форме

Предельная непрерывная модель инвертирующего преобразователя, согласно [4], имеет в векторно-матричной форме следующий вид:

Записав соответствующую систему дифференциальных уравнений, получаем:

Приравняв производные к 0, получаем систему уравнений стационарного режима:

откуда находим установившиеся значения фазовых координат системы:

Исследование на экстремум функции UС0(γ0) показывает наличие максимума при
![]()

При тех же допущениях, что и при оценке пульсаций в схеме Чука, для инвертирующего преобразователя получены системы уравнений для 0<t<τ = γT и для γT = τ<t<T соответственно:

Из полученных систем уравнений определяем размах пульсаций тока дросселя и выходного напряжения преобразователя:

Относительная величина пульсаций выходного напряжения увеличивается с ростом γ:

Сравнение статических характеристик преобразователей (см. (8) и (23)) показывает, что при r<<R характеристики оказываются очень близкими, причем характеристика схемы Чука проходит немного выше характеристики инвертирующего преобразователя.
На рис. 6 представлены относительные статические характеристики |U10(γ)|/U схемы Чука и |U0(γ)|/U понижающего преобразователя при R = 100 Ом, r = 0,1 Ом.

Рис. 6. Статические характеристики преобразователя Чука и инвертирующего преобразователя
Форма пульсаций выходного напряжения в схеме Чука гладкая, как после LC-фильтра, а размах пульсаций пропорционален квадрату периода коммутации, т. е. T2. В инвертирующем преобразователе пульсации выходного напряжения имеют пилообразную форму, как после RC-фильтра, а размах пульсаций пропорционален периоду коммутации T. Вычисление размаха пульсаций выходного напряжения в инвертирующем преобразователе при тех же значениях U, R, T, С = С1 и γ0, согласно формуле (26), имеет значение 4/15 В (267×10-3 B), в 100 раз большее, чем в схеме Чука.
Потребляемый схемой Чука ток от источника питания непрерывен с пульсациями пилообразной формы, размах которых пропорционален периоду коммутации T. В инвертирующем преобразователе входной ток имеет разрывы непрерывности первого рода в моменты срабатывания ключа К. Ток, потребляемый инвертирующим преобразователем, приближается к последовательности прямоугольных импульсов с амплитудой I0 (23) и длительностью γT.
Подмагничивание сердечника дросселя в схеме Чука происходит при M<0 намагничивающей силой:

В инвертирующем преобразователе сердечник дросселя подмагничивается намагничивающей силой:

Анализ выражений (28) и (29) показывает, что при r<<R подмагничивание сердечника дросселя практически одинаково в обеих схемах, а с учетом r в схеме Чука незначительно меньше.
Сравнение габаритов схемы Чука и инвертирующего преобразователя показывает следующее. Поскольку подмагничивание сердечника дросселя в обеих схемах одинаково, а сумма величин токов в двух обмотках дросселя схемы Кука

оказывается практически равной току дросселя в инвертирующем преобразователе, можно считать габариты дросселей одинаковыми. Схема Чука имеет два конденсатора вместо одного у инвертирующего преобразователя. Однако для получения одинакового размаха пульсаций емкость выходного конденсатора в инвертирующем преобразователе должна быть на два порядка больше.
Кроме рассмотренных свойств преобразователей, существенное значение имеют и динамические свойства, определяющие их работу в переходных режимах и при охвате обратной связью.
Динамические свойства преобразователя при изменении входного напряжения и постоянном γ = τ/T зависят от собственных значений матрицы предельной непрерывной модели A (7) для схемы Чука и (22) для инвертирующего преобразователя. Поскольку элементы матрицы A зависят от γ = τ/T, то и ее собственные значения зависят от γ.
Поскольку коэффициенты векторно-матричных уравнений (7) и (22) зависят от γ, это существенно затрудняет аналитический анализ динамических свойств преобразователей при изменении γ.
Собственные значения матрицы A (7) схемы Чука при параметрах R = 100 Ом, r = 0,1 Ом, L = 0,01 Гн, M = 0,009 Гн, C1 = C2 = 10-5 Ф, T = 10-5c, вычисленные для значений γ0 = 0,4 и γ0 = 0,6, представлены в таблицах 2 и 3 соответственно.
|
|
λ1,2, c |
λ3,4, c |
|
M = –0,009 Гн |
–2,4426×102±1,3505×103i |
–2,5626×102±1,0027×103i |
|
M = +0,009 Гн |
–2,1043×101±1,8781×103i |
–4,8948×102±7,3127×103i |
|
|
λ1,2, c |
λ3,4, c |
|
M = –0,009 Гн |
–2,4439×102±8,7673×103i |
–2,5614×102±1,0079×103i |
|
M = +0,009 Гн |
–2,8845м101±1,2293×103i |
–4,7168×102±7,4472×103i |
Для инвертирующего преобразователя при параметрах R = 100 Ом, r = 0,1 Ом, L = 0,01 Гн, C = 10–5 Ф, T = 10–5c собственные значения матрицы A (22), вычисленные для значений γ0 = 0,4 и γ0 = 0,6, имеют, соответственно, значения:
l1,2 = –5,0005×102±1,8303×103iс и l1,2 = –5,0005×102±1,1619×103iс.
Временные диаграммы выходного напряжения преобразователей при включении входного напряжения U = 100 B (1 — для схемы Чука при M = –0,009 Гн, 2 — для схемы Чука при M = +0,009 Гн, 3 — для инвертирующего преобразователя) представлены на рис. 7 (γ0 = 0,4) и на рис. 8 (γ0 = 0,6).

Рис. 7. Переходные процессы включения преобразователя Чука и инвертирующего преобразователя при γ0 = 0,4
Анализ процессов включения преобразователей, представленных на рис. 7 и 8, показывает, что лучшим качеством переходного процесса по устойчивости и по быстродействию обладает инвертирующий преобразователь. Из преобразователей Чука намного лучшим быстродействием обладает преобразователь с отрицательной взаимоиндукцией обмоток дросселя.

Рис. 8. Переходные процессы включения преобразователя Чука и инвертирующего преобразователя при γ0 = 0,6
При одинаковых емкостях выходного конденсатора схема Чука с отрицательной взаимоиндуктивностью обмоток дросселя имеет размах пульсаций выходного напряжения в 100 раз меньше, чем у инвертирующего преобразователя. Увеличив емкость выходного конденсатора инвертирующего преобразователя в 100 раз, получаем тот же размах пульсаций выходного напряжения, как и в схеме Чука, но за счет резкого снижения устойчивости и быстродействия. На математической модели инвертирующего преобразователя, представленной на рис. 9, получены переходные процессы включения инвертирующего преобразователя при исходной емкости выходного конденсатора в 10 мкФ и при увеличенной в 100 раз (кривые 1 и 2 на рис. 10 соответственно).

Рис. 9. Математическая модель инвертирующего преобразователя в системе MATLAB + Simulink

Рис. 10. Переходные процессы включения инвертирующего преобразователя при исходной емкости выходного конденсатора и увеличенной в 100 раз его емкости
Собственные значения матрицы A (22) при увеличенной в 100 раз емкости выходного конденсатора: l1,2 = –1,00001×101±1,8974×102iс подтверждают сделанный вывод.
Включение преобразователя Чука при отрицательной взаимоиндуктивности обмоток дросселя (M<0) приводит к первоначальному изменению выходного напряжения в направлении, противоположном установившемуся отрицательному значению. Математически это объясняет передаточная функция преобразователя при γ = const:

где U(p) и U1(p) — изображения по Лапласу входного и выходного напряжений,
b2 = C2M / (1–γ)D, b0 = γ, a4 = C1C2 / (1–γ),
a0 = (1–γ)+r[(γ2+(1–γ)2) / (1–γ)] / R.
При включении постоянного входного напряжения U
U(p) = U/p, U1(p) = W(p)U/p
установившееся значение выходного напряжения
![]()
совпадает с полученным выше результатом (формула (8)).
Анализ начальных значений производных выходного напряжения dku1/dtk(+0), k = 0, 1, 2 дает следующее:

При M<0 начальное значение второй производной выходного напряжения положительно при нулевом начальном значении его первой производной и отрицательном установившемся значении выходного напряжения. Это объясняет начальное направление изменения выходного напряжения в направлении, противоположном установившемуся значению.
Такое свойство часто встречается у неминимально-фазовых систем, к которым относится и преобразователь Чука при изменении входного напряжения и γ = const. Действительно, из двух нулей передаточной функции W(p) (30)

при M<0 один лежит слева, а другой — справа от мнимой оси плоскости p.
Физический смысл первоначального изменения выходного напряжения при М<0 в направлении, противоположном установившемуся значению, заключается в следующем. При включении преобразователя в первой части периода переключений, согласно рис. 2а, полярность ЭДС, наведенной во вторичной обмотке дросселя (рис. 11а), такова, что полярность выходного напряжения противоположена установившейся.

Рис. 11. Полярности напряжений на элементах схемы Чука при пуске:
а) в первой части периода;
б) во второй его части
Учитывая, что при высокой частоте переключений конденсатор С2 не успевает заметно зарядиться, во второй части периода полярности ЭДС в обеих обмотках дросселя не изменяются (рис. 11б), и выходной конденсатор С1 продолжает заряжаться в прежней полярности. Так будет продолжаться, пока С2 не зарядится и не начнет перезаряжать С1 в противоположной полярности и уменьшать напряжение, прикладываемое к первичной обмотке дросселя.
Выводы
- Свойства импульсного преобразователя Чука существенно зависят от взаимоиндуктивности обмоток дросселя. При существенной величине взаимоиндуктивности изменение ее знака (перемена концов одной из обмоток) резко изменяет свойства преобразователя. При отрицательной взаимоиндуктивности пульсации выходного напряжения и входного тока существенно меньше, чем при положительной.
- При отрицательной взаимоиндуктивности обмоток дросселя и постоянстве γ преобразователь Чука представляет собой неминимально-фазовую систему по отношению ко входному напряжению. Это проявляется в начальном изменении выходного напряжения при включении преобразователя в направлении, противоположном установившемуся значению.
- Сравнение с известным инвертирующим импульсным преобразователем показало такое же значительное влияние малого активного сопротивления обмоток дросселя на величину выходного напряжения преобразователя. При одинаковых сопротивлениях нагрузки и достаточно малых сопротивлениях обмоток дросселя статические характеристики обоих преобразователей практически совпадают.
- Пульсации выходного напряжения преобразователя Чука при одинаковых параметрах с инвертирующим преобразователем оказываются существенно меньшими, а входной ток оказывается непрерывным по сравнению с импульсным входным током инвертирующего преобразователя.
- С точки зрения габаритов, схема Чука обладает лишним конденсатором, но для получения одинаковых пульсаций выходного напряжения выходной конденсатор в инвертирующем преобразователе должен иметь на два порядка большую емкость, что приводит к значительному ухудшению качества переходного процесса при включении по сравнению с преобразователем Чука.
Таким образом, преобразователь Чука обладает лучшими свойствами по сравнению с инвертирующим преобразователем.
- Cúuk and R. D. Middlebrook. A New Optimum Topology Switching DC-to-DC Converter // IEEE Power Electronics Specialist Conference. 1977.
- Cúuk and R. D. Middlebrook. Coupled Inductor and Other Extensions of a New Optimum Topology Switching Converter // IEEE Industrial Applications Society Annual Meeting. 1977.
- Cúuk and W. M. Polivka. Analysis of Integrated Magnetics to Eliminate Current Ripple in Switching Converters // Power Conversion International Proceedings. 1983.
- Коршунов А. И. Предельная непрерывная модель системы с высокочастотным периодическим изменением структуры // Известия вузов. Приборостроение. 2009. №9.
 27 февраля, 2022
27 февраля, 2022 1 октября, 2020
1 октября, 2020 26 мая, 2015
26 мая, 2015