
Оценка возможностей стабилизации переменного напряжения с помощью импульсного инвертирующего преобразователя
Введение
Инвертирующий импульсный преобразователь (ИИП) (рис. 1), в отличие от понижающего и повышающего ИП, изменяет величину uН(t) относительно e(t) в обе стороны [1, 2].

Рис. 1. Схема инвертирующего импульсного преобразователя
При высокой частоте переключений идеального ключа К сопротивлении дросселя r = 0 и e(t) = const:
uН = –uС = –(γ/1–γ)е, γ = t/Т.
Очевидно, что uН = е при γ = 1/2, при γ ≤ 1/2 — uН ≤ е, при γ ≥ 1/2 — uН ≥ е. Это свойство ИИП позволяет не применять дополнительные меры для смещения пределов изменения e(t), обеспечивающие возможность ИП компенсировать изменения uH. Например, если e меньше необходимого uH, то понижающий ИП не может получить на выходе требуемое значение uH без увеличения e. Особенно значимым это свойство ИИП оказывается для стабилизаторов напряжения переменного тока, исправляющих искажения формы напряжения, вызванные высшими гармониками.
В статье исследуются особенности применения ИИП в стабилизаторах напряжения переменного тока как при отсутствии, так и при наличии высших гармоник. Хотя условия работы в ИИП требуют от ключа повышенного допустимого напряжения, прогресс в развитии силовой полупроводниковой техники позволяет ожидать расширения области их применения.
Предельная непрерывная модель ИИП
Полагая частоту коммутации F = 1/T ключа К достаточно высокой, анализ свойств стабилизатора напряжения переменного тока удобно проводить, используя предельную непрерывную модель ИИП [2].

Рис. 2. Эквивалентная схема инвертирующего импульсного преобразователя при ключе К в положении «1»
При обычных допущениях эквивалентные схемы ИИП в первой 0 < t < τ и второй τ < t < T части периода переключений К, представленные на рис. 2 и 3 соответственно, описываются системами трех дифференциальных уравнений (ДУ), записанными по уравнениям Кирхгофа и преобразованными к нормальной форме:

Рис. 3. Эквивалентная схема инвертирующего импульсного преобразователя при ключе К в положении «2»
при 0 < t < τ:

или

при τ < t < T:

или

Запись систем ДУ в векторно-матричном виде дает соответственно:

где

Согласно [3], предельная непрерывная модель ИИП описывается векторно-матричным уравнением:

где

или системой трех ДУ:

Стабилизация выходного напряжения
Поскольку напряжение на нагрузке, согласно третьему уравнению системы (7),

будем рассматривать задачу стабилизации величины и формы напряжения uС при изменении величины и формы напряжения e(t).
Рассмотрим вначале стабилизацию напряжения при отсутствии высших гармоник в e(t), то есть при
e(t) = Emsin(ωt). (8)
В установившемся гармоническом режиме из системы (7) при γ = const получаем систему алгебраических уравнений относительно комплексных амплитуд фазовых координат Īlm, ŪCm, ĪHm, имеющую вид:

Из системы уравнений (9) находим:

где
zд = jωl + r,zC = 1/jωC; zH = jωLH + RH; zHC = zHzC/(zH + zC).
Из выражения (10) следует, что в установившемся гармоническом режиме ИИП можно рассматривать как регулируемый источник напряжения с ЭДС Ēm(γ) и выходным сопротивлением zВЫХ(jω,γ):

Из выражения (10) находим амплитуду и фазу выходного напряжения относительно e(t) (8):


Из выражений (12), (13) очевидно, что, выбирая величину γ, можно получить номинальную амплитуду напряжения на нагрузке UHm = √2UH, фаза же его отличается от фазы e(t).
Статическая характеристика ИИП UHm = f(γ) при постоянных Em, zд(jω), zHC(jω) в точках γ = 0 и γ = 1 принимает нулевое значение (UВЫХm(0) = UВЫХm(1) = 0) согласно (12). Это означает, что на интервале 0<γ<1 статическая характеристика имеет, по крайней мере, один максимум. Рабочий диапазон изменения γ ограничен пределами 0< γ < γ0, где γ0 — точка максимума выходного напряжения, если она единственная, или левая из них, если точка максимума не одна.
Как было указано в [1, 4, 5], возможны два варианта стабилизации выходного напряжения. В первом из них контролируется действующее, среднее или амплитудное значение напряжения переменного тока. Для его определения требуется интервал наблюдения, равный или кратный половине периода измеряемого напряжения. Во втором варианте контролируются мгновенные значения напряжения переменного тока.
Недостаток первого варианта — ограничение быстродействия, определяемое временем изменения напряжения, и сохранение отклонения формы напряжения от синусоидальной. Первый вариант можно использовать при малых искажениях формы напряжения и отсутствии кратковременных выбросов и провалов напряжения. Для исключения резких кратковременных скачков и провалов напряжения необходимо так же контролировать мгновенные значения напряжения, как и при исправлении напряжений его формы.
Простейший способ компенсации изменений стабилизируемого (входного) напряжения e(t) следует из первого уравнения системы (7). Он основан на принципе управления по возмущению [4, 6, 7] и не требует введения обратной связи. Переписав это уравнение в виде:

заключаем, что замена в этом уравнении нестабильного напряжения e(t) стабильным задающим напряжением [8] uЗ(t) = UЗmsin(ωt) требует изменения γ по закону:
При синусоидальной ЭДС e(t)=Emsin(ωt) γ(t) имеет постоянное значение:
γ = UЗm / (UЗm+Em).
Коэффициенты системы ДУ (7) постоянны, и, следовательно, в установившемся режиме uC(t) = –uВЫХ(t) является гармонической функцией. Отличие его от uЗ(t) в этом случае определяется выходным сопротивлением zВЫХ(jω,γ) (11) эквивалентного регулируемого источника напряжения.
Если частота коммутации достаточно велика, параметры дросселя r и l, а следовательно, и zВЫХ могут оказаться незначительными. Вследствие этого ÙВЫХm = –UHm = – ÙCm будет мало отличаться от ÙЗm.
Из уравнения (12) можно найти значение γ, обеспечивающее при номинальном значении Em = EmH номинальное значение UВЫХm = (UВЫХm)Н. Из найденных значений γ, которых будет не менее двух, следует выбрать наименьшее, соответствующее устойчивому (возрастающему) участку статической характеристики. Если номинальные значения EmH и (UВЫХm)Н близки, что обычно имеет место, то это значение γ (номинальное значение γН), будет близко к 0,5.
Из выражения (15) по найденному значению γН легко определять амплитуду задающего напряжения U3m:

Такой выбор UCm обеспечивает при Em = EmH точное совпадение UВЫХm с желаемым (UВЫХm)Н. Однако при отклонении Em от EmH UВЫХm будет отличаться от желаемого значения (UВЫХm)Н, хотя в уравнении (14) [γ /(1– γ)]e(t) будет оставаться неизменным и равным uЗ(t). Причина этого в изменении выходного сопротивления ИИП (11), зависящего от γ (11). Разумеется, изменение zН вызывает изменение zНС, а следовательно, и отклонение UВЫХm от (UВЫХm)Н.
Определение параметров дросселя
При выборе параметров дросселя необходимо учитывать противоречивые требования. С точки зрения уменьшения выходного сопротивления (11), следует уменьшать l и r, а для уменьшения пульсаций выходного тока дросселя il (рис. 2) — увеличивать l. Поскольку уменьшить выходное сопротивление можно, например, с помощью отрицательной обратной связи, определяющим является требование обеспечения пульсаций тока дросселя il, не превосходящих допустимые.
Современные полупроводниковые ключи допускают высокую частоту коммутации, что позволяет весьма просто оценить пульсации il и uВЫХ, выбрать индуктивность дросселя l и емкость конденсатора С.
При оценке размаха пульсаций будем полагать, что за период коммутации средние значения величин e(t), il(t) и uC(t) остаются неизменными, а пульсации il(t) и uC(t) пренебрежимо малы по сравнению с их средними значениями.
Размах пульсаций il(t) просто определить в первой части периода коммутации: 0<t<τ = γT. Пренебрегая падением напряжения на активном сопротивлении дросселя r, получаем максимальный размах пульсаций:
![]()
Учитывая, что UЗm = [γ/(1–γ)]Em поддерживается постоянным, получаем
![]()
Таким образом, максимальный размах пульсаций имеет место при минимальной γ, соответствующей максимальной амплитуде Em = (Em)MAX:

и составляет

Размах пульсаций выходного напряжения ΔuВЫХ = ΔuC определяется током нагрузки iH, протекающим через конденсатор в первой части периода Т: (0<t<τ = γT). Наибольший размах пульсации имеют при амплитудном значении iH = IHm:

Полагая, что при изменении Em IHm остается постоянной, а γ имеет максимальное значение при минимальной амплитуде входного напряжения (Em)MIN, равное по аналогии с выражением (γ)MIN (17):

получаем, подставив (γ)MAX (20) в выражение (19):

По заданным допустимым размахам пульсаций (Δil)доп и (ΔiC)доп определяем необходимые значения l и С:


Если при выбранном значении l выходное сопротивление инвертирующего ИП окажется недостаточно малым, чтобы при изменении амплитуды входного напряжения в заданных пределах отклонения выходного напряжения не превышали допустимых, необходимо, помимо разомкнутого контура управления, ввести еще и замкнутый контур стабилизации напряжения.
Замкнутый контур стабилизации напряжения
Поскольку основные изменения входного напряжения компенсирует разомкнутый контур управления, изменяющий γ согласно закону (15), замкнутый контур стабилизации должен компенсировать небольшие отклонения выходного напряжения, вызываемые изменением выходного сопротивления ИИП (11). Наиболее прост вариант стабилизации амплитуды напряжения, предложенный в [1, 4, 5]. В этом случае при затухании переходного процесса, вызванного скачкообразным приращением γ, за половину периода напряжения замкнутый контур стабилизации с интегральным регулятором можно рассматривать как простейшую линейную импульсную систему. Выбором параметра регулятора можно обеспечить время переходного процесса в контуре, равным периоду квантования, т. е. полупериоду напряжения [1].
Стабилизация напряжения при наличии высших гармоник
Изменение γ по закону, определяемому выражением (15), позволяет в первом уравнении системы ДУ предельной непрерывной модели (7) заменить входное напряжение e(t), содержащее высшие гармоники, синусоидальным напряжением uЗ(t)=UЗmsin(ωt), т. е. исключить высшие гармоники. Однако одновременно часть коэффициентов системы ДУ становятся переменными. Закон их изменения определяется законом изменения γ (15). Например, в простейшем случае:
e(t) = Emsin(ωt) + E3msin(3ωt). (24)
Согласно (15) получаем:

Коэффициенты системы (7) (1–γ)/C и (1–γ)/l оказываются периодическими с периодом π/ω (с частотой 2ω), поскольку

Подстановка выражений (24), (25) и (27) в систему (7) превращает ее в линейную неоднородную систему ДУ с периодическими коэффициентами и периодическими свободными членами:

где a12(t) = f(t)/l; a21(t) = f(t)/C; f(t) = 1–γ(t); f(t+π/ω) = f(t).
Пусть, в общем случае, e(t) — периодическая функция, содержащая, кроме основной гармоники e1(t) = E1msin(ωt), любое число высших гармоник с нулевой начальной фазой. При этом нули e(t) сдвинуты на половину периода, и выражение (15) дает положительные значения γ, что необходимо для работы ИИП. Функция γ (t) (15), очевидно, является периодической, с периодом, равным периоду входного напряжения e(t), хотя в частных случаях может быть в целые числа раз, например в два раза, меньшим.
Можно доказать, что система неоднородных ДУ с периодическими коэффициентами и периодическими свободными членами того же периода при затухающих решениях однородной системы имеет периодическое решение с тем же периодом, асимптотически устойчивое в целом.
В случае устойчивости периодического решения системы неоднородных ДУ (27) на выходе ИИП будет наблюдаться периодическое напряжение uH(t) = –uC(t) c частотой входного напряжения ω = 2πf. Хотя ИИП позволяет практически полностью очистить входное напряжение от высших гармоник, искажающих его форму, появляется другая причина, их вызывающая, а именно — переменные коэффициенты системы (27). Аналитическая оценка получаемого выигрыша в гармоническом составе выходного напряжения оказывается невозможной вследствие отсутствия аналитического решения системы уравнений (27). Поэтому дальнейшее исследование возможно на ПК при наличии прикладных программ, подобных, например, MATLAB 6,5 Simulink 5.
Положим параметры нагрузки такими же, как и при стабилизации напряжения с помощью понижающего ИП [4]: PH = 2000 Вт; cosφ = 0,8; UH = 220 B; IH = 11,364 A; zH = 19,36 Oм; RH = 15,488 Ом; ωLH = 11,616 Oм. Номинальное входное напряжение EH = 220 B при допустимых колебаниях 160 B<EH<250 B. Задав допустимый размах пульсаций тока дросселя (Δi)доп = 5 А при частоте коммутации F = 200f = 104 Гц и UЗm = 220√2 В, получаем:

ωl = 100π×3,3×10–3 = 1,04 Ом.
При допустимом размахе пульсаций выходного напряжения (ΔuC)доп = 4 В:

1/ωC = 1/(100π×2,33×10-4)=13,6 Ом.
Активное сопротивление дросселя r примем из условия r = RH/200 = 15,488/200 = = 0,07744 Ом.
На основе предельной непрерывной модели ИП, описываемой системой ДУ (7), и уравнения регулятора γ (15) в системе MATLAB 6,5 Simulink 5 построена цифровая модель стабилизатора напряжения, представленная на рис. 4.
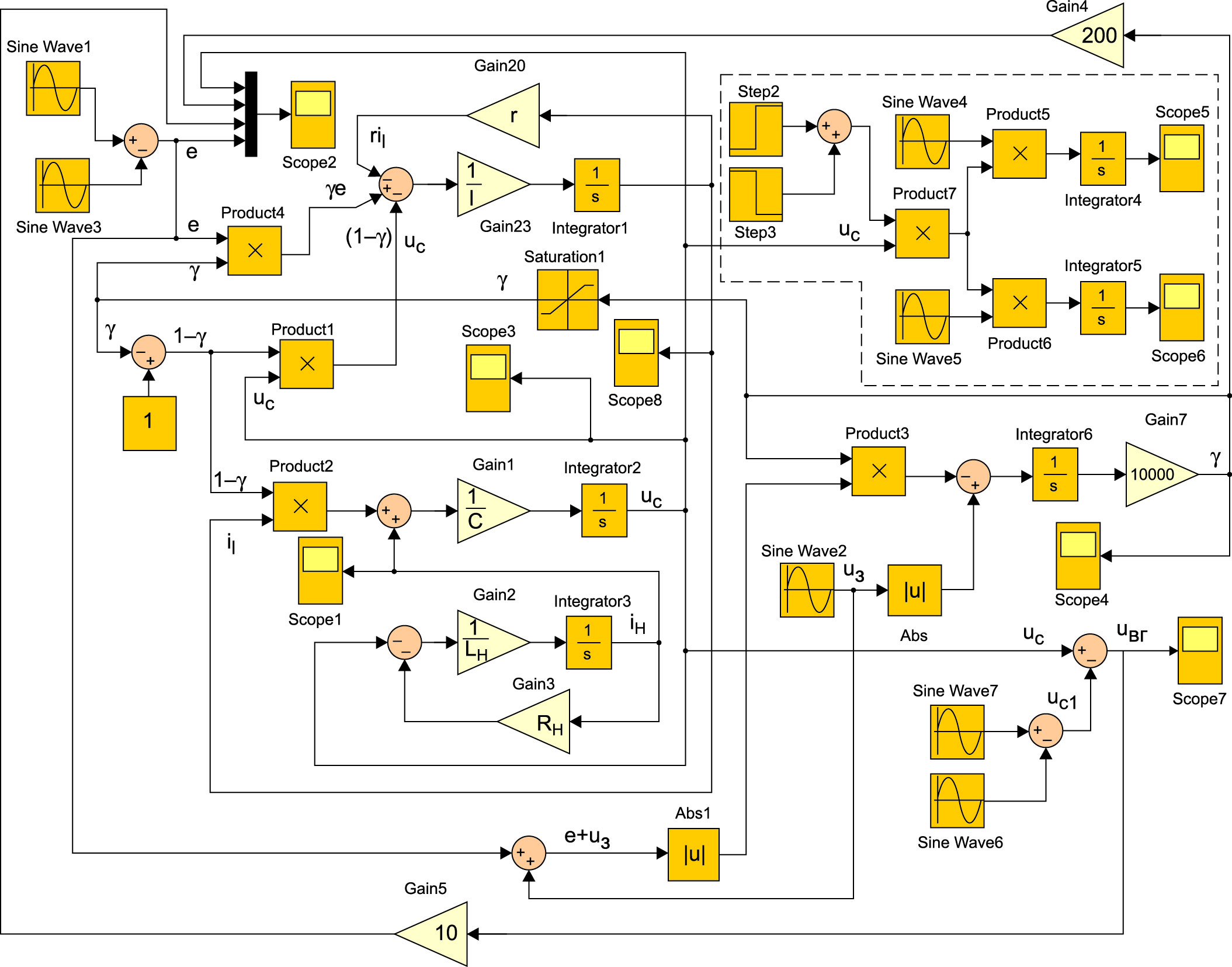
Рис. 4. Цифровая модель стабилизатора напряжения переменного тока в системе MATLAB 6,5 Simulink 5
Значение γ определяет в модели функциональный преобразователь (ФП), выполняющий операцию деления:
γ = |uЗ |/ |uЗ+е|. (28)
Совпадение нулевых точек напряжений e(t) и uЗ(t) позволяет делить модули, что существенно упрощает ФП. В модели на рис. 4 ФП представлен замкнутой системой, состоящей из блока умножения Product 3, интегратора Integrator 6, усилителя Gain 7 с большим коэффициентом усиления и нелинейного блока Saturation, ограничивающего величину γ пределами 0<γ<1.
На вход ФП поступает |uЗ(t)|, а по цепи отрицательной обратной связи произведение γ| е+uЗ|. Высокий коэффициент усиления Gain 7 позволяет получить
|uЗ(t)|–γ| е+uЗ| ≈ 0,
что и обеспечивает выполнение операции деления (28).
Моделирование стабилизатора при рассчитанных параметрах дросселя и конденсатора фильтра при выбранном значении:
U3m = 220√2 Â, e(t) = EH√2sin(ωt) B, EH = 220 B дало UC = UH = 256,47 B, γ = 0,5.
Это же значение дает вычисление по формуле (12). Неравенство UC > UH объясняется емкостным характером сопротивления (1–γ)2zHC и соизмеримой индуктивной составляющей сопротивления дросселя zД.
Уменьшив UЗm до 192√2 B, удается получить UC = UH = 220 B, γ = 0,4662.
При верхней границе стабилизируемого напряжения E = 250 В моделирование дает UC = UH = 216,7 B, γ= 0,4344, а на нижней границе E = 160 В — UC = UH = 230 B, γ = 0,5454. Падение напряжения на нагрузке при увеличении Е и возрастание его при уменьшении Е объясняется следующим. Величина [γ(1–γ)]E остается постоянной и равной UЗ =192 B, а в знаменателе дроби (12) при увеличении γ, то есть при уменьшении Е, уменьшается первое слагаемое (1–γ)2zHC и влияние второго слагаемого zД усиливается.
Увеличение частоты коммутации в пять раз до вполне реальной величины 50 кГц позволяет при практическом сохранении пульсаций уменьшить l и С в пять раз.
Моделирование стабилизатора при уменьшенных в пять раз l и С дало следующие результаты. При UЗm = 220√2 B, γ = 0,5 оказалось, что UC = UH = 214,27 B вместо 256,47 B (при исходных значениях l и С). Уменьшение UC = UH объясняется изменением характера zHC, ставшего в этом случае индуктивным.
Подбором определено значение UЗm = 226,2√2 B, обеспечивающее UC = UH = 220 B, γ = 0,5069. Увеличение Е до 250 В дало UC = UH = 220,8 B, γ = 0,4752, а уменьшение Е до 160 В вызвало уменьшение UC = UH до 217,57 В и увеличение γ до 0,5857.
Изменение напряжения на нагрузке при изменении входного напряжения на 250–160 = 90 В составляет всего 220,8–217,57 ≈ 3,2 В.
На рис. 5 представлены расчетные статические характеристики ИИП UC = UH = f(t) при Е = 220 В для расчетных параметров l и С (1) и для уменьшенных в пять раз значений l и С (2). Очевиден большой запас регулирования. При увеличении стабилизируемого напряжения возможно поддержание заданного значения UC = UH практически при любом Е, разумеется, не превышающем допустимого значения для транзисторов ключа К (рис. 1). При уменьшении Е можно поддерживать заданное значение UC = UH вплоть до малых значений Е, определяемых значением γ0, соответствующим границе устойчивой части статической характеристики (рис. 5). Так, при расчетных значениях l и С для F = 10 кГц получаем EMIN1 = EH2/Um1 = 2202/805 = 60 B, а при меньших в пять раз значениях l и С (F = 50 кГц) EMIN2 = EH2/Um2 = 2202/1400 =34,5 B.

Рис. 5 Расчетные статистические характеристики инвертирующего импульсного преобразователя
Резкие провалы входного напряжения система стабилизации компенсирует практически мгновенно за счет изменения величины γ. Однако вследствие изменения коэффициентов системы ДУ (7), зависящих от γ, происходит переходный процесс, искажающий форму напряжения. Характер искажения зависит от моментов возникновения провала напряжения и его окончания. На рис. 6 и 7 представлена реакция стабилизатора напряжения на провал входного напряжения e(t) от 250 до 160 В в течение трех периодов напряжения (0,06 с) при начале провала, соответствующего нулевой фазе e(t) (рис. 6) и фазе 90° (рис. 7).

Рис. 6. Реакция стабилизатора напряжения на провал входного напряжения e(t) от 250 В до 160 В в течение 3 периодов напряжения в момент, соответствующий нулевой фазе e(t)

Рис. 7. Реакция стабилизатора напряжения на провал входного напряжения e(t) от 250 до 160 В в течение 3 периодов напряжения в момент, соответствующий фазе e(t) 90°
Компенсация высших гармоник в стабилизируемом напряжении не позволяет, однако, полностью исключить их в выходном напряжении. Причина этого в периодическом изменении коэффициентов системы ДУ (7), зависящих от γ. Из первого уравнения системы (7) следует, что чем меньше индуктивность l и активное сопротивление r дросселя, тем ближе UC = UH к освобожденному от гармоник входному напряжению u3(t) = [γ(1–γ)]e(t). Аналитическое решение системы получить не удается. Поэтому ниже приведены результаты исследования на цифровой модели при значениях l и C, соответствующих F = 50 кГц, r = RH/200 = 0,07744 Ом, UЗm = 226,2√2 B, обеспечивающем UH = 220 B при E = 220 B.
На рис. 8 и 9 представлены установившиеся процессы в стабилизаторе при e(t) = 220√2sin(ωt)±30√2sin(3ωt) B, v = 100π рад/с.

Рис. 8. Процессы в стабилизаторе при наличии третьей гармоники нулевой фазы
в стабилизируемом напряжении

Рис. 9. Процессы в стабилизаторе при наличии третьей гармоники с фазой 180°
в стабилизируемом напряжении
Основная гармоника выходного напряжения –uH(t) = uC(t) имеет соответственно значения:
uC1(t) = 220,26√2sin(ωt)–6,036√2cos(ωt) и uC1(t) = 219,05√2sin(ωt)–7,724√2sin(γt).
Сумма высших гармоник, полученная вычитанием из напряжения –uH(t) = uC(t) его первой (основной) гармоники uC1(t), обозначена на рис. 8 и 9 как uВГ(t). Третья гармоника в этом напряжении равна соответственно:
uC3(t) = 1,119√2sin(3ωt)+1,719√2cos(3ωt) и uC3(t) = –2,51√2sin(3ωt)–2,855√2sin(3ωt).
Как и ожидалось, наличие третьей гармоники (единственной) в e(t) вызвало изменение γ с частотой 2ω.
Амплитуды синусной и косинусной составляющих первой или любой высшей гармоники определяет подсистема, выделенная на цифровой модели (рис. 4) пунктиром. Соответствующая гармоника, например первая uC1(t), необходимая для определения uВГ(t), получается сложением этих составляющих (рис. 8 и 9).
Оценка корректности предельной непрерывной модели стабилизатора осуществлена сравнением результатов, полученных на ней и на дискретной модели стабилизатора, содержащей модель реального ключа. Дискретная модель построена в системе MATLAB 6,5 Simulink 5, SimPowerSystem. Параметры снабберных цепей ключа выбраны такими, чтобы не вызывали существенных отличий от свойств идеального ключа, использованного при построении предельной непрерывной модели стабилизатора. На рис. 10 представлен процесс изменения выходного напряжения при включении стабилизатора, полученный на дискретной uÂ(t) и на непрерывной uН(t) моделях, и их разность, увеличенная в 10 раз. На рис. 10 видно хорошее совпадение результатов.

Рис. 10. Процессы изменения выходного напряжения при включении стабилизатора, полученные на дискретной (uд(t)) и на непрерывной (uн(t)) его моделях, и их разность, увеличенная в 10 раз
Выводы
Стабилизатор напряжения переменного тока на основе ИИП допускает значительные отклонения стабилизируемого напряжения от его номинального значения. Повышение напряжения ограничивается лишь допустимым напряжением транзисторов ключа, а понижение напряжения — сопротивлением дросселя, которое можно уменьшить при повышении частоты коммутации ключа. При достаточно высокой частоте коммутации ключа расчет стабилизатора можно производить по его предельной непрерывной модели, описываемой системой линейных ДУ с переменными коэффициентами. Для стабилизации напряжения рационально регулировать относительную длительность пребывания ключа в крайних положениях в зависимости от мгновенных значений стабилизируемого напряжения. Это позволяет не только мгновенно отрабатывать скачки входного напряжения, но и подавлять его высшие гармоники.
При отсутствии высших гармоник стабилизируемого напряжения относительная длительность пребывания ключа в крайних положениях постоянна. Коэффициенты системы уравнений предельной непрерывной модели также постоянны. Вследствие этого выходное напряжение в установившемся режиме изменяется по гармоническому закону. При скачке стабилизируемого напряжения происходит практически мгновенная его компенсация за счет изменения относительной длительности пребывания ключа в крайних положениях. Однако это не исключает переходный процесс, вызываемый скачкообразным изменением коэффициентов ДУ предельной непрерывной модели системы. Хотя за счет регулирования относительной длительности пребывания ключа в крайних положениях высшие гармоники стабилизируемого напряжения компенсируются, выходное напряжение все-таки высшие гармоники содержит, вследствие периодического изменения коэффициентов ДУ системы. При достаточно малом сопротивлении дросселя гармоники на выходе значительно меньше входных. При увеличении быстродействия и предельных параметров транзисторов существенно расширятся возможности импульсных стабилизаторов напряжения, использующих ИИП.
- Коршунов А. И. Импульсные преобразователи напряжения переменного тока // Силовая электроника. 2006. № 1.
- Коршунов А. И. Анализ установившихся режимов импульсных преобразователей напряжения переменного тока // Электричество. 2005. № 11.
- Коршунов А. И. Предельная непрерывная модель системы с высокочастотным периодическим изменением структуры // Известия вузов. Приборостроение. 2009. № 9.
- Коршунов А. И. Исследование стабилизации напряжения переменного тока с помощью понижающего импульсного преобразователя // Силовая электроника. 2015. №4.
- Авт. свид. РФ № 2246127. Импульсный стабилизатор переменного напряжения // А. И. Коршунов.
- Бесекерский В. А., Попов Е. П. Теория систем автоматического регулирования. М.: Наука. 1972.
- Коршунов А. И. Повышение качества стабилизации выходного напряжения импульсного преобразователя постоянного тока // Изв. вузов. Приборостроение. 2013. Т. 56, № 3.
- Коршунов А. И. Источник эталонного напряжения импульсного стабилизатора напряжения переменного тока // Электричество. 2006. № 1.
 8 октября, 2007
8 октября, 2007 19 октября, 2007
19 октября, 2007 14 ноября, 2020
14 ноября, 2020