
Моделирование параллельной работы двух статических преобразователей частоты, построенных по расщепленной схеме с уравнительным реактором
Введение
В настоящее время в силовой преобразовательной технике широко применяют многоуровневые инверторы напряжения с широтно-импульсной модуляцией. С помощью таких силовых преобразователей можно получить многоуровневое напряжение, близкое к синусоидальному. Такие силовые преобразователи часто применяются для обеспечения электропитания мощных асинхронных двигателей [1], а также в составе устройств для проведения электрических испытаний изоляции силовых трансформаторов [2].
В работах [1, 3] была описана схема устройства статического преобразователя частоты (ПЧ), построенного на базе двух мостовых двухуровневых инверторов с уравнительным реактором (рис. 1). Это устройство позволяет получить трехуровневое выходное напряжение, которое сглаживается выходным LC-фильтром и приобретает синусоидальную форму. Достоинство данного устройства заключается в уменьшении потерь в основных узлах инвертора (уменьшение потерь мощности при переключениях силовых транзисторов) с одновременным уменьшением уровня пульсаций выходного напряжения. То есть при использовании двух мостовых инверторов, вырабатывающих двухуровневое напряжение, все устройство обеспечивает на выходе трехуровневое выходное напряжение, более близкое к синусоидальному, чем двухуровневое. При этом питание всей схемы происходит от одного общего источника постоянного напряжения [1].

Рис. 1. Статический преобразователь частоты по расщепленной схеме с уравнительным реактором:
И — источник постоянного напряжения; Т1, Т2 — транзисторные мосты; УР — уравнительный реактор
В случае, если нужно увеличить мощность статического ПЧ, построенного по расщепленной схеме с уравнительным реактором (рис. 1), можно просто увеличить уровень выходного напряжения. Для этого нужно применить источник постоянного напряжения с более высоким уровнем напряжения и, соответственно, использовать силовые ключи (например, IGBT) более высокого класса напряжения. Это не всегда удобно, потому что, как правило, уровень напряжения источника питания ограничен. К тому же силовые транзисторы большого класса весьма дороги. Поэтому оптимальнее использовать параллельное включение двух или более статических ПЧ. Таким образом, увеличение обеспечиваемой мощности происходит за счет обеспечения большего выходного тока.
В данной статье рассматриваются вопросы синхронизации работы двух статических ПЧ, построенных по расщепленной схеме с уравнительным реактором, и симметризации их выходных токов. Исследуются два преобразователя, построенные по схеме рис. 1, а также их системы управления.
Источником постоянного напряжения у каждого из преобразователей является диодный мостовой выпрямитель, работающий от трехфазной сети (рис. 2а). Величина сетевого напряжения составляет UC = 380 В c частотой fС = 50 Гц. В качестве нагрузки используются два согласующих трехфазных силовых трансформатора с подключенной к ним на вторичной стороне общей RL-нагрузкой (рис. 2б).
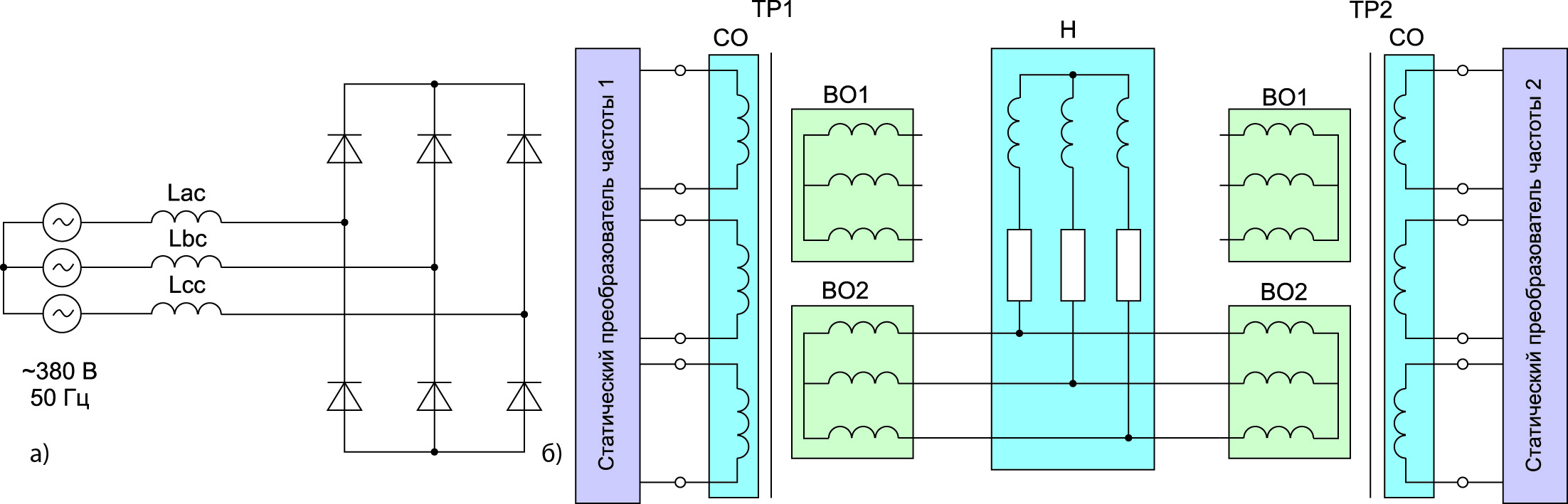
Рис. 2.
а) Схема сетевого выпрямителя;
б) согласующие трансформаторы с RL-нагрузкой: Lac, Lbc, Lcc — индуктивность сети; ТР1, ТР2 — согласующие трансформаторы; СО — сетевая обмотка; ВО1, ВО2 — вторичная обмотка; Н — нагрузка
В состав блок-схемы системы управления (рис. 3) каждого из статических ПЧ входят:
- задающий генератор (ЗГ), отвечающий за частоту и уровень выходного напряжения;
- тактовый генератор (ТГ), вырабатывающий тактовые импульсы всей системы управления;
- блок задания напряжения, работающий в совокупности с ЗГ и отвечающий за уровень и скорость изменения выходного напряжения;
- регулятор напряжения, регулятор тока, регулятор нейтрали, которые следят и регулируют качество и соответствие заданным значениям выходных токов и напряжений;
- блок ограничения напряжения и тока, ограничивающий выходные напряжения и токи до допустимого уровня;
- блок расчета реферирующего уровня и импульсов управления силовыми ключами (транзисторами) преобразователя.

Рис. 3. Блок-схема системы управления статического преобразователя частоты
Управление преобразователями происходит по алгоритму чередующихся переключений [1], благодаря чему достигается эффект уменьшения потерь мощности при переключениях силовых транзисторов инвертора с одновременным уменьшением уровня пульсаций выходного напряжения.
Существует несколько причин, по которым выходные токи преобразователей не равны при одинаковом задании выходного напряжения:
- Неточные данные с датчиков выходного напряжения каждого из преобразователей приводят к тому, что каждая из систем управления считает, что на выходе напряжение соответствует заданному, хотя на самом деле это не так. Поэтому два преобразователя вырабатывают неидеально одинаковые напряжения.
- Из-за различной величины индуктивности фильтра преобразователей выходные напряжения и токи преобразователей сглаживаются не одинаково.
- Временное запаздывание в передаче данных между системами управления преобразователей вносит погрешность в расчеты системы управления.
- Неравенство частот тактовых генераторов системы управления преобразователей также вносит погрешность в расчеты системы управления.
Каждый из преобразователей обладает следующими выходными параметрами:
- номинальное выходное напряжение (среднеквадратическое значение) UН = 360 В;
- номинальный выходной ток (среднеквадратическое значение) IН = 230 А;
- номинальное значение выходной частоты fН = 50–100 Гц;
- номинальная полная выходная мощность SН =250 кВА;
- номинальная активная выходная мощность PН = 50 кВт.
Метод исследования
Исследование проблемы синхронизации работы и симметризации токов двух статических ПЧ, построенных по расщепленной схеме с уравнительным реактором, производилось на компьютерной модели в программном комплексе «Элтран», предназначенном для моделирования вентильных преобразователей на ПК и работающем под управлением ОС Windows. Он применяется при исследовании и проектировании различных устройств силовой электроники, таких как выпрямители, ведомые сетью, автономные инверторы, ПЧ, импульсные преобразователи и др., совместно с их системой автоматического управления и регулирования, с различными видами нагрузок и источников.
«Элтран» разработан НИЦ ПТ (г. Саранск). Достоверность результатов, получаемых в ходе моделирования, подтверждена многолетним опытом эксплуатации реальных преобразователей серий ВПЧА, ВПЧС, ПСУ, СПЧН и т. д., выпускаемых НИЦ ПТ.
Результаты исследования
Первой задачей при синхронизации работы двух ПЧ является синхронизация ЗГ двух систем управления. Схема ЗГ одного из преобразователей представлена на рис. 4а.
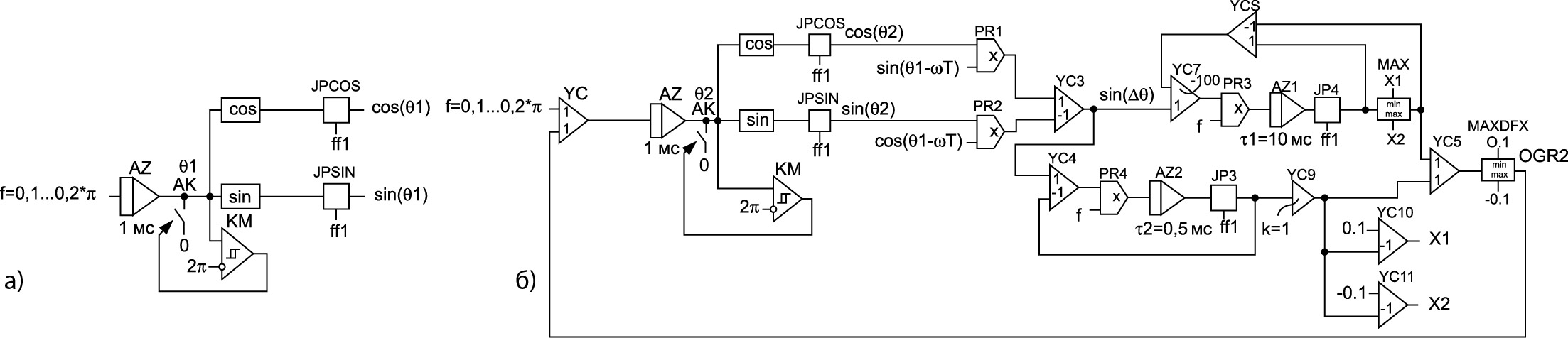
Рис. 4. Блок-схема ЗГ системы управления преобразователя:
а) ведущего;
б) ведомого (f — константа, определяющая частоту ЗГ; AZ — интегратор; Θ1 — аргумент функции cos и sin; AK — управляемый аналоговый ключ; KM — компаратор; JPCOS и JPSIN — функции дискретизации; ff1 — импульсы ТГ)
На выходе интегратора AZ формируется пилообразный сигнал аргумента Θ1 функций cos и sin путем обнуления выхода интегратора по сигналу с выхода компаратора KM при достижении выходным сигналом AZ значения 2π. Сигнал аргумента Θ1 подается на вход блока функции cos и sin, после чего две гармонические функции дискретизируются с частотой отсчетов ТГ. ЗГ вырабатывает функции cos и sin, так как все расчеты в системе управления ведутся в ортогональных dq-координатах [4] для экономии вычислительных ресурсов реальной системы управления. Исключением является расчет сигналов управления силовых транзисторов преобразователя, которые вычисляются в естественных abc-координатах [4].
Фазовую автоподстройку выходных сигналов ЗГ двух систем управления можно выполнить по кольцевой схеме, при которой сигналы ЗГ подстраиваются друг под друга. При моделировании такого типа автоподстройки было выяснено, что выходная частота обоих ЗГ отклоняется от своего заданного значения на некоторую небольшую величину. Причиной этого является задержка в передаче сигналов cosΘ и sinΘ от ЗГ1 к ЗГ2 и наоборот, зависящая от частоты ТГ. Происходит следующее: при синхронных выходных сигналах ЗГ в системе кольцевой фазовой автоподстройки всегда вырабатывается некоторый ненулевой сигнал поправки sin(∆Θ) — синус разности фаз между соответствующими сигналами двух ЗГ, величина которого зависит от задержки при передаче cosΘ и sinΘ между системами управления, т. е. от частоты ТГ. Этот небольшой ненулевой сигнал поправки отклоняет на небольшую величину частоту ЗГ. Поэтому была выбрана линейная система фазовой автоподстройки ЗГ с разделением преобразователей на ведущий и ведомый. Схема ЗГ ведущего преобразователя показана на рис. 4а, схема ЗГ ведомого — на рис. 4б. Особенность фазовой автоподстройки такого типа заключается в том, что выходные сигналы ведомого ЗГ всегда будут подстраиваться под задержанные на период ТГ сигналы ведущего ЗГ. Этот факт является одной из дополнительных причин несимметрии выходных напряжений, а следовательно, и токов двух ПЧ. Кроме того, система линейной фазовой автоподстройки медленнее, чем кольцевая система. Но данная система позволяет избежать отклонения выходной частоты преобразователя от заданной. Это принципиально при обеспечении питания асинхронного двигателя.
Расчет сигнала поправки ЗГ2 происходит по следующей формуле:
sin(∆Θ) = cos(Θ2) × sin(Θ2–wT)–sin(Θ2) × cos(Θ2–wT), (1)
где T — период ТГ, w — круговая частота выходного напряжения статического преобразователя частоты.
Сигнал поправки пропускается через пропорциональное звено с низкочастотной фильтрацией и интегральное звено. Схема фазовой автоподстройки ведомого ЗГ также включает в себя ограничитель интегрального звена (MAX3) и ограничитель суммарной поправки (MAXDFX), чтобы избежать перерегулирования. Как показано на рис. 5, при выбранных параметрах фазовой подстройки синхронизировать сигналы ведомого и ведущего ЗГ удается в течение 100–150 мс при начальном рассогласовании 90°.

Рис. 5. Осциллограммы, отражающие фазовую подстройку сигналов ведущего и ведомого ЗГ (TE1, TE2 — сигнал аргумента функций cos и sin; COS1 и SIN1 — выходные сигналы ведущего ЗГ;
COS2 и SIN2 — выходные сигналы ведомого ЗГ; SINDTE — сигнал рассогласования между сигналами ведущего и ведомого ЗГ; OGR2 — выходной сигнал ограничителя суммарной поправки)
Периоды ТГ обеих систем управления, как было сказано ранее, немного отличаются по причине невозможности подбора двух кварцевых резонаторов с идеально равными параметрами. Период ТГ1 T1 = 83,339 мкс, а ТГ2 — Т2 = 83,32 мкс. Эти значения соответствуют частотам f1 = 11999,2 Гц и f2 = 12001,9 Гц. По этой причине сигнал рассогласования sin(∆Θ) имеет некоторые скачки. Скачок sin(∆Θ) отражается в скачке задания частоты ведомого ЗГ, как показано на рис. 6. Чем ближе значения частот ТГ обоих преобразователей, тем реже будет происходить скачок выходной частоты ведомого ЗГ. Также при увеличении частоты ТГ величина скачка выходной частоты ведомого ЗГ будет уменьшаться.

Рис. 6. Осциллограммы, отражающие скачок значения сигнала рассогласования и реакцию на него (SINDTE — сигнал рассогласования между сигналами ведущего и ведомого ЗГ; OGR2 — выходной сигнал ограничителя суммарной поправки; F2+ПОПР — сигнал задания частоты ведомого ЗГ)
Регулятор симметрии выходных токов преобразователей располагается в блоке задания напряжения в системе управления каждого из статических ПЧ. Блок-схема регулятора показана на рис. 7. Входными сигналами регулятора являются нормированные данные с датчиков тока дросселя (ied и ieq) и емкости (icd и icq) выходного фильтра в ортогональных dq-координатах, а также выходные сигналы ЗГ cos(Θ) и sin(Θ). Из сигналов датчиков тока рассчитываются токи сетевой обмотки согласующего трансформатора (рис. 2б) в dq-координатах (id и iq). Далее производится фильтрация входных данных фильтром низких частот, после чего происходит расчет активной и реактивной составляющих тока сетевой обмотки согласующего трансформатора P и Q по следующим формулам:
P = cosΘ × iCOd+sinΘ × iCOq, (2)
Q = sinΘ × iCod+cosΘ × iCOq, (3)
где P — активная составляющая тока сетевой обмотки согласующего трансформатора; Q — реактивная составляющая тока сетевой обмотки; iCOd — ток сетевой обмотки по координате d; iCOq — ток сетевой обмотки по координате q.

Рис. 7. Блок-схема регулятора симметрии выходных токов статических преобразователей частоты
Далее производится расчет сигналов рассогласования по активной (ΔP) и реактивной (ΔQ) составляющим тока сетевой обмотки. Данные из чужой системы управления (P2–T2 и Q2–T2), так же, как и в случае с синхронизацией ЗГ, приходят с задержкой на период ТГ. Затем сигналы рассогласования проходят через пропорциональное и апериодическое звенья регулятора. Выходные сигналы пропорционального и апериодического звеньев складываются и пропускаются через ограничитель. Сигналы рассогласования по активной и реактивной составляющим тока добавляются в сигнал задания по напряжению в nt-координатах, который рассчитывается по следующим формулам:
uzn = cosΘ × uzd+sinΘ × uzq, (4)
uzt = cosΘ × uzq–sinΘ × uzd, (5)
uzn = cosΘ × cosΘ × Mz+sinΘ × sinΘ × Mz = Mz, (6)
uzn = cosΘ × sinΘ × Mz+sinΘ × cosΘ × Mz = 0, (7)
где uzn — задание по напряжению по координате n; uzt — задание по напряжению по координате t; uzd — задание по напряжению по координате d; uzq — задание по напряжению по координате q; Mz — модуль задания по напряжению в dq-координатах.
Сигнал рассогласования ΔP добавляется в задание по напряжению по координате t, а ΔQ — по координате n. Далее происходит пересчет задания по напряжению из nt-координат в dq–координаты по следующим формулам:
uzd = cosΘ × uzn — sinΘ × uzt, (8)
uzd = cosΘ × uzt + sinΘ × uzn. (9)
Далее сигнал задания по напряжению в dq-координатах с учетом поправки поступает в блок регулятора напряжения.
Как показали результаты моделирования, при отсутствии регулятора симметрии выходных токов в системах управления статических ПЧ происходит переток активной и реактивной энергии из одного преобразователя в другой. Это происходит из-за отличающихся по амплитуде и фазе выходных напряжений преобразователей (рис. 8а) по причинам, указанным выше. Так, при завышенных показаниях датчиков напряжения первого преобразователя на 1%, а второго — заниженных на 1%, при индуктивности на одну фазу дросселя выходного фильтра первого преобразователя LФ1 = 300 мкГн, а второго — LФ2 = 150 мкГн, и задержке в передаче данных между системами управления, равной периоду ТГ T = 83 мкс, происходит заряд емкости звена постоянного напряжения второго преобразователя со скоростью около 1150 В/c. При этом имеет место неравномерная токовая нагрузка дросселей выходного фильтра и, соответственно, силовых транзисторов преобразователя. В режиме холостого хода (ХХ) при 100% задании по напряжению ток дросселя фильтра фазы А первого преобразователя составляет ILФ1 = 160 А, второго — ILФ2 = 80 А (рис. 8а). В режиме номинальной нагрузки 500 кВ·А и 100 кВт при номинальном задании по напряжению ток дросселя фильтра фазы А первого преобразователя ILФ1 = 105 А, второго — ILФ2 = 165 А (рис. 8б).

Рис. 8. Выходные напряжения и токи дросселей фильтра преобразователей:
а) в режиме ХХ;
б) при нагрузке 500 кВ•А/100 кВт (UA1 и UA2 — выходные напряжения фазы А первого и второго преобразователя; ILA1 и ILA2 — токи дросселей фильтра по фазе А первого и второго преобразователя)
При включении регулятора симметрии выходных токов преобразователей в режиме ХХ (рис. 9а) удается достигнуть практически равных по амплитуде и фазе выходных напряжений. Токи реакторов выходных фильтров также равны по эффективному значению ILФ1 = ILФ2 = 103 А. Токи сетевых обмоток трансформаторов немного отличаются по эффективному значению IСО1 =1,75 А, IСО2 =2,2 А. Ток IСО2 отстает от IСО1 на 5°. Токи вторичных обмоток IВО21 и IВО22 близки к нулевому значению с максимальным значением около 100 мА. Неравенство нулю токов вторичных обмоток означает, что переток активной и реактивной мощности из одного преобразователя в другой есть, но уровень перетока мощности мал, так как токи сетевых обмоток трансформаторов практически равны, а уровень токов вторичных обмоток ничтожно мал. Активная мощность, которая перетекает из одного преобразователя в другой, рассеивается на активных сопротивлениях обмоток трансформаторов и реакторов фильтров, поэтому непрерывный заряд конденсаторов звена постоянного напряжения не происходит. Кроме того, в модели не отражены активные потери в вентилях преобразователей, которые также препятствуют непрерывному заряду емкостей звена постоянного напряжения.

Рис. 9. Выходные напряжения и токи преобразователя, токи обмоток согласующих трансформаторов:
а) в режиме ХХ;
б) при работе с нагрузкой 500 кВ•А/100 кВт
При работе ПЧ с номинальной нагрузкой 500 кВА и 100 кВт с включенным регулятором симметрии выходных токов (рис. 9б) так же, как и в режиме ХХ, удается достигнуть практически равных по амплитуде и фазе выходных напряжений. Токи реакторов выходных фильтров также равны по эффективному значению ILФ1 = ILФ2 = 124 А. Токи сетевых обмоток трансформаторов равны по эффективному значению IСО1 = IСО2 = 220 А. Токи вторичных обмоток трансформаторов также равны по эффективному значению IВО21 = IВО22 = 63,5 А. Токи сетевой и вторичной обмотки ведомого преобразователя отстают от соответствующих токов ведущего на 83 мкс, так как выходные сигналы ЗГ ведомого преобразователя отстают от выходных сигналов ЗГ, ведущего на период ТГ.
Выводы
Для нормальной параллельной работы двух статических ПЧ необходимо синхронизировать ЗГ систем управления преобразователей. Синхронизация ЗГ должна осуществляться по линейной схеме с разделением преобразователей на ведущий и ведомый, а не по кольцевой схеме с подстройкой двух ЗГ друг под друга, чтобы избежать отклонения выходной частоты от заданного значения.
Частоты ТГ двух систем управления всегда немного отличаются из-за невозможности подбора двух кварцевых резонаторов с идеально равными параметрами. По этой причине в сигнале поправки в системе фазовой автоподстройки ЗГ ведомого преобразователя периодически происходит незначительный всплеск, из-за чего происходит всплеск задания частоты ведомого преобразователя. Чем ближе по значению частоты двух ТГ, тем реже это происходит. Также, при увеличении частоты ТГ, величина скачка выходной частоты ведомого ЗГ будет уменьшаться.
При использовании описанного выше регулятора симметрии выходных токов преобразователей удается предотвратить переток активной и реактивной мощности между двумя статическими ПЧ, заряд конденсаторов звена постоянного напряжения и добиться равных выходных напряжений и токов. Сигналами поправки в схеме регулятора являются разность между активной и реактивной составляющей токов СО двух согласующих трансформаторов.
- Патент № 2439773 (РФ) C1. Инвертор, выполненный по расщепленной схеме с уравнительным реактором, и способ управления этим инвертором по алгоритму чередующихся переключений / Г. М. Мустафа, И. Б. Луганская, Ю. М. Сеннов, А. Д. Ильинский. Патентообладатель: Мустафа Г. М. 10.01.2012.
- Patent № 0139556 (US) A1. Device for testing high-voltage equipment / Rene Annowsky (DE), Andreas Thiede (DE). 7.07.2012.
- Мустафа Г. М., Левченко А. В. Инвертор, выполненный по расщепленной схеме с уравнительным реактором // Международный центр науки и образования, VIII международная заочная научно-практическая конференция «Научная дискуссия: вопросы технических наук». М.: 2013.
- Виноградов А. Б. Векторное управление электроприводами переменного тока / ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина». Иваново. 2008.
 8 июня, 2022
8 июня, 2022 10 августа, 2020
10 августа, 2020 28 ноября, 2019
28 ноября, 2019