
Дискретные структурные динамические модели понижающего импульсного ППН при модуляции момента включения силового транзистора и двусторонней модуляции
В статье предлагается обоснование линеаризованных дискретных структурных динамических моделей понижающего ППН (рис. 1а) при модуляции момента включения силового транзистора и двусторонней модуляции.

Рис. 1.
а) Схема силовой части понижающего импульсного ППН;
б) ее нелинейная дискретная структурная динамическая модель для режима прерывистого тока (РПТ)
При обосновании линеаризованных моделей импульсного ППН будем исходить из обоснованной ранее в [1] нелинейной модели (рис. 1б), составленной из линейных динамических звеньев с передаточными функциями G(p), Z(p) и ключей K1–K3

где L и r — индуктивность силового дросселя и активное сопротивление цепи дросселя; R — сопротивление нагрузки; rC — эквивалентное последовательное сопротивление (ЭПС) выходного конденсатора; C — емкость этого конденсатора, tC = rCC — постоянная времени. Ключи K1–K3 передают сигнал только со входа на выход ключа; под изображением ключа указано время его замкнутого состояния, причем t1 — длительность включенного состояния силового транзистора, tс — время спада тока дросселя. Выходной сигнал ключа обозначен так же, как и входной сигнал, но со «звездочкой».
Используется общий метод линеаризации нелинейных систем автоматического управления в окрестности некоторого установившегося режима работы [6]. При этом предполагается, что на систему, работавшую в установившемся режиме, извне воздействует малое возмущение (или несколько малых возмущений). В качестве возмущения может служить также изменение начальных условий для описывающих систему дифференциальных уравнений.
Линеаризацию нелинейной дискретной модели (рис. 1б) иллюстрирует рис. 2, на котором в верхней части сплошными линиями показаны кривые сигналов iL, uвых, uвых*, uвх, uвх*, uд.пр, uд.пр*, действующих в нелинейной модели понижающего ППН в установившемся режиме, а штрихами — кривые этих же сигналов в возмущенном режиме, обозначенные как iL+ΔiL, uвых+Δuвых, uвых*+Δuвых*, uвх+Δuвх, uвх*+Δuвх*, uд.пр*+Δuд.пр*. Предполагается, что сигнал uд.пр(t) при переходе к возмущенному режиму не меняется. Кривые возмущенного режима должны мало отличаться от соответствующих кривых установившегося режима, в остальном их вид произволен (за исключением моментов переключений в схеме).

Рис. 2. Временные диаграммы, поясняющие линеаризацию нелинейной импульсной модели понижающего ППН в РПТ
В нижней части рис. 2 показаны приблизительно кривые сигналов ΔiL, Δuвых, Δuвых*, Δuвх, Δuвх* и Δuд.пр*, получаемые вычитанием кривых установившегося (стационарного) режима из соответствующих кривых возмущенного режима. Эти сигналы называются вариациями соответствующих сигналов установившегося режима и, в отличие от последних, обозначаются дополнительным символом «Δ» [6].
Анализируя кривые вариаций сигналов на рис. 2, видим, что на вход звена G(p) модели понижающего ППН (рис. 1а) на каждом периоде T при отсчете времени от момента включения силового транзистора подаются шесть элементарных импульсов:
- Импульс конечной высоты uвых(0)+Δuвых(0) и малой длительности |Δt1|, действующий в начальный момент времени, полярность которого совпадает со знаком приращения Δt1.
- Импульс малой переменной высоты Δuвых(t) и конечной длительности t1+tс, действующий на интервале t1+tс, полярность которого совпадает со знаком сигнала Δuвых(t).
- Импульс конечной высоты uвых(t1+tс)+Δuвых(t1+tс) и малой длительности |Δtс|, действующий в момент t1+tс, полярность которого совпадает со знаком приращения Δtс.
- Необходимо учитывать, что перечисленные в п. 1–3 импульсы инвертируются в суммирующем узле, как и сигнал uвых* в схеме на рис. 1б.
- Импульс конечной высоты uвх(0)+Δuвх(0) и малой длительности |Δt1|, действующий в начальный момент времени, полярность которого совпадает со знаком приращения Δt1.
- Импульс малой переменной высоты Δuвх(t) и конечной длительности t1, действующий на интервале t1, полярность которого совпадает со знаком вариации Δuвх(t).
- Импульс конечной высоты uд.пр и малой длительности |Δtс|, действующий в момент t1+tс, полярность которого совпадает со знаком приращения Δt1. Этот импульс инвертируется в суммирующем звене, как и сигнал uд.пр* в схеме на рис. 1б.
Заменяя импульсы малой длительности, действующие на входе звена G(p), дельта-импульсами эквивалентной площади, получаем линейную импульсную модель (рис. 3а), в которой учтены указанные шесть импульсов, а время отсчитывается от момента отпирания силового транзистора.

Рис. 3. Линеаризованные импульсные модели для вариаций тока силового дросселя понижающего ППН:
а) исходная;
б, в) преобразованные
Импульсы конечной высоты uвых(0)+Δuвых(0), uвых(t1+tс)+Δuвых(t1+tс) и uвх(0)+Δuвх(0) и uд.пр, показанные на рис. 2 и 3а, заменены дельта-импульсами, формируемыми на выходах идеальных импульсных элементов ИЭ1–ИЭ4 и пропускаемыми через пропорциональные звенья с коэффициентами передачи соответственно uвых(0), uвых(t1+tс), uвх(0) и uд.пр. При этом значения вариаций Δuвых(0), Δuвых(t1+tс), Δuвх(0) не учитываются, поскольку они предполагаются малыми по сравнению со значениями uвых(t) и uвх(t). Ключи K1, K2 периодически замыкаются на время, указанное под изображением ключа.
Параллельно соединенные ветви с одинаковыми идеальными импульсными элементами ИЭ1 и ИЭ3, ИЭ2 и ИЭ4 на рис. 3а можно заменить одной ветвью с таким же импульсным элементом и соединенным последовательно с ним пропорциональным звеном с коэффициентом передачи uвх(0)– uвых(0) и uвых(t1+tс)+uд.пр (рис. 3б).
Учтем, что непосредственно из рассмотрения кривых сигналов iL(t) и iL(t)+ΔiL(t) на рис. 2 при малых отклонениях следует равенство

откуда найдем
В выражении (2) для понижающего ППН имеем:

где iL(t1+tс) = 0. Теперь выражение (1) принимает вид:

Следовательно, входной сигнал Δtс верхней ветви схемы на рис. 3б можно заменить сигналом ΔiL(t1+tс–0), добавив последовательно с ИЭ2 пропорциональное звено с коэффициентом передачи L/[uвых(tс)+uд.пр], и преобразовать схему на рис. 3б к виду, показанному на рис. 3в.
Объединяя схему, представленную на рис. 3в, со схемой для выходного конденсатора (рис. 1б), согласно которой справедливо равенство
Δuвых(p) = Z(p)[ΔiL(p)–Δiн.д(p)],
получаем линейную импульсную динамическую модель всей силовой части понижающего импульсного ППН для РПТ (рис. 4а).
В режиме непрерывного тока (рис. 4б) пауза между импульсами тока iL(t), имеющаяся на рис. 2, исчезает; справедливо равенство t1+tс=T; ключ K2 в схеме на рис. 1б непрерывно замкнут; импульсы Δuвых*, имеющиеся на рис. 2, будут отсутствовать.
Анализируя кривые вариаций сигналов при переходе от установившегося режима к возмущенному в РНТ (рис. 4б) при отсчете времени от момента отпирания силового транзистора, видим, что на вход звена G(p) линеаризованной модели подаются три элементарных импульса:
- Импульс конечной высоты uвх(0)+Δuвх(0) (в общем случае напряжение uвх в стационарном режиме является переменным, например за счет пульсаций) и малой длительности |Δt1|, действующий в начальный момент, полярность которого совпадает со знаком приращения Δt1.
- Импульс малой переменной высоты Δuвх(t) и конечной длительности t1, действующий на интервале t1, полярность которого совпадает со знаком вариации Δuвх(t).
- Импульс конечной высоты uд.пр и малой длительности |Δt1| (предполагаем, что прямое падение напряжения на открытом силовом диоде в установившемся и возмущенном режимах одинаково), действующий в начальный момент, полярность которого противоположна знаку приращения Δt1; учтем, что этот импульс инвертируется в суммирующем узле.
Линеаризованная импульсная модель в РНТ (рис. 4в), где uм.фРНТ = uвх(0)+uд.пр, как видно, получается из модели для РПТ, но не так просто, как в случае модуляции момента выключения силового транзистора [2]. В случае модуляции момента включения силового транзистора (модуляции фронта) для перехода от модели для РПТ (рис. 4а) к модели для РНТ (рис. 4в) необходимо не только исключить цепь обратной связи через идеальный импульсный элемент ИЭ2, замкнуть ключ K1, но и заменить коэффициент передачи uм.фРПТ = uвх(0)–uвых(0) на uм.фсх1 = uвх(0)+uд.пр.

Рис. 4.а) Линеаризованные импульсные структурные динамические модели силовой части понижающего ППН при модуляции момента включения силового транзистора для РПТ (а) и РНТ (в);
б) временные диаграммы, поясняющие особенности линеаризации в РНТ
Двусторонняя ШИМ
Линеаризацию нелинейной дискретной структурной модели (рис. 1б) в случае двусторонней ШИМ иллюстрирует рис. 5, где, в отличие от рис. 2, показаны только кривые сигналов uвых*, uвх* и uд.пр* в установившемся и возмущенном режимах без кривых изменения uвых, uвх и uд.пр. В установившемся режиме силовой транзистор открывается в момент t’ и запирается в момент t” пересечения кривой выходного напряжения усилителя ошибки uу.о(t) с графиком пилообразного (треугольного) напряжения uп(t), причем ни один из моментов времени t’, t” не связан жестко c тактовыми моментами времени, в то время как на рис. 2 моменты выключения силового транзистора совпадают с тактовыми моментами. Длительность открытого состояния силового транзистора в данном случае изменяется за счет модуляции момента фронта на Δt1ф и модуляции момента спада на Δt1с.

Рис. 5. Временные диаграммы, поясняющие линеаризацию нелинейной импульсной модели понижающего ППН в РПТ, при двусторонней модуляции; uу.о — выходное напряжение усилителя ошибки, входящего в состав системы управления
Как показано на рис. 5 и 1б, при двусторонней ШИМ на вход звена G(p) модели на рис. 1б на каждом периоде T подаются восемь элементарных импульсов:
- Импульс конечной высоты uвых(t’)+Δuвых(t’) и малой длительности |Δt1ф|, действующий в момент t’, полярность которого совпадает со знаком приращения Δt1ф.
- Импульс малой переменной высоты Δuвых(t) и конечной длительности t1+tс, действующий на интервале t1+tс, полярность которого совпадает со знаком сигнала Δuвых(t).
- Импульс конечной высоты uвых+Δuвых и малой длительности |Δt1с+Δtс|, действующий в момент t”+tс, полярность которого совпадает со знаком приращения Δt1с+Δtс.
Перечисленные три импульса инвертируются в суммирующем звене, как и сигнал uвых*.
- Импульс конечной высоты uвх+Δuвх и малой длительности |Δt1ф|, действующий в момент t’, полярность которого совпадает со знаком приращения Δt1ф.
- Импульс малой высоты Δuвх и конечной длительности t1, действующий на интервале t1, полярность которого совпадает со знаком вариации Δuвх(t).
- Импульс конечной высоты uвх+Δuвх и малой длительности |Δt1с|, действующий в момент t”, полярность которого совпадает со знаком приращения Δt1с.
- Импульс конечной высоты uд.пр и малой длительности |Δt1с|, действующий в момент t”, полярность которого противоположна знаку приращения Δt1с.
- Импульс конечной высоты uд.пр и малой длительности |Δt1с+Δtс|, действующий в момент t”+tс, полярность которого совпадает со знаком приращения Δt1с+Δtс. Импульсы, перечисленные в последних двух пунктах, дополнительно инвертируются в суммирующем звене, как и сигнал uд.пр*.
Перечисленным импульсам соответствует линейная импульсная модель, представленная на рис. 6а. Объединяя ветви с одинаковыми импульсными элементами и одинаковыми входными сигналами и учитывая равенство

аналогичное (3), получаем схему, представленную на рис. 6б.

Рис. 6. Линейные импульсные модели для вариаций тока силового дросселя понижающего ППН с двусторонней ШИМ:
а) исходная;
б) преобразованная
Объединяя схему, представленную на рис. 6б, со звеном Z(p), получаем линейную импульсную модель для силовой части понижающего ППН в РПТ при двусторонней ШИМ (рис. 7а), где введены обозначения uсх1 = uвх(t”) + uд.пр, uм.фРПТ = uвх(t’) – uвых(t’).
Из модели для двусторонней модуляции (рис. 7а) получаются модели для случаев:
- модуляции момента выключения силового транзистора (модуляции момента спада импульса), если положить Δt1ф ≡ 0 и исключить соответствующую ветвь схемы;
- модуляции момента включения силового транзистора (модуляции момента фронта импульса) (рис. 4а), если положить Δt1с ≡ 0, исключить соответствующую ветвь схемы.
Двусторонняя ШИМ в РНТ
В РНТ ключи K2 в схемах на рис. 1б и 7а непрерывно замкнуты, поэтому импульсы uвых* отсутствуют. По рис. 7б видно, что при переходе от установившегося режима (сплошные кривые) к возмущенному (штриховые кривые) на вход звена G(p) в линеаризованной модели за период подаются пять элементарных импульсов, соответствующих вариациям сигналов:
- Импульс конечной высоты uвх(0)+Δuвх(0) (при отсчете времени от момента отпирания силового транзистора) и малой длительности |Δt1ф|, действующий в начальный момент времени, полярность которого совпадает со знаком приращения Δt1ф.
- Импульс малой переменной высоты Δuвх(t) и конечной длительности t1, действующий на интервале t1, полярность которого совпадает со знаком вариации Δuвх(t).
- Импульс конечной высоты uвх(t1)+Δuвх(t1) и малой длительности |Δt1с|, действующий в момент t1, полярность которого совпадает со знаком приращения Δt1с.
- Импульс конечной высоты uд.пр и малой длительности |Δt1ф|, действующий в начальный момент, полярность которого противоположна знаку приращения Δt1ф.
- Импульс конечной высоты uд.пр и малой длительности |Δt1с|, действующий в момент t1, полярность которого противоположна знаку приращения Δt1с. Необходимо учитывать, что упомянутые последние два импульса дополнительно инвертируются в суммирующем звене, так же, как и сигнал uд.пр* в схеме на рис. 1б.
Как видно, импульсы, упомянутые в п. 1 и 4, 3 и 5, можно объединить, благодаря чему получаются импульсы высоты uвх(0)+uд.пр и uвх(t1)+uд.пр. Тогда для РНТ будет справедлива импульсная модель, представленная на рис. 7в,
где uсх1 = uвх(t1)+uд.пр, uм.фсх1 = uвх(0)+uд.пр.
Из сравнения схем на рис. 7а и 7в видно, что для получения модели для РНТ (рис. 7в) в модели для РПТ (рис. 7а) необходимо исключить ветвь обратной связи с импульсным элементом ИЭ1 и заменить пропорциональное звено с коэффициентом передачи uм.фРПТ на звено с коэффициентом передачи uм.фсх1.
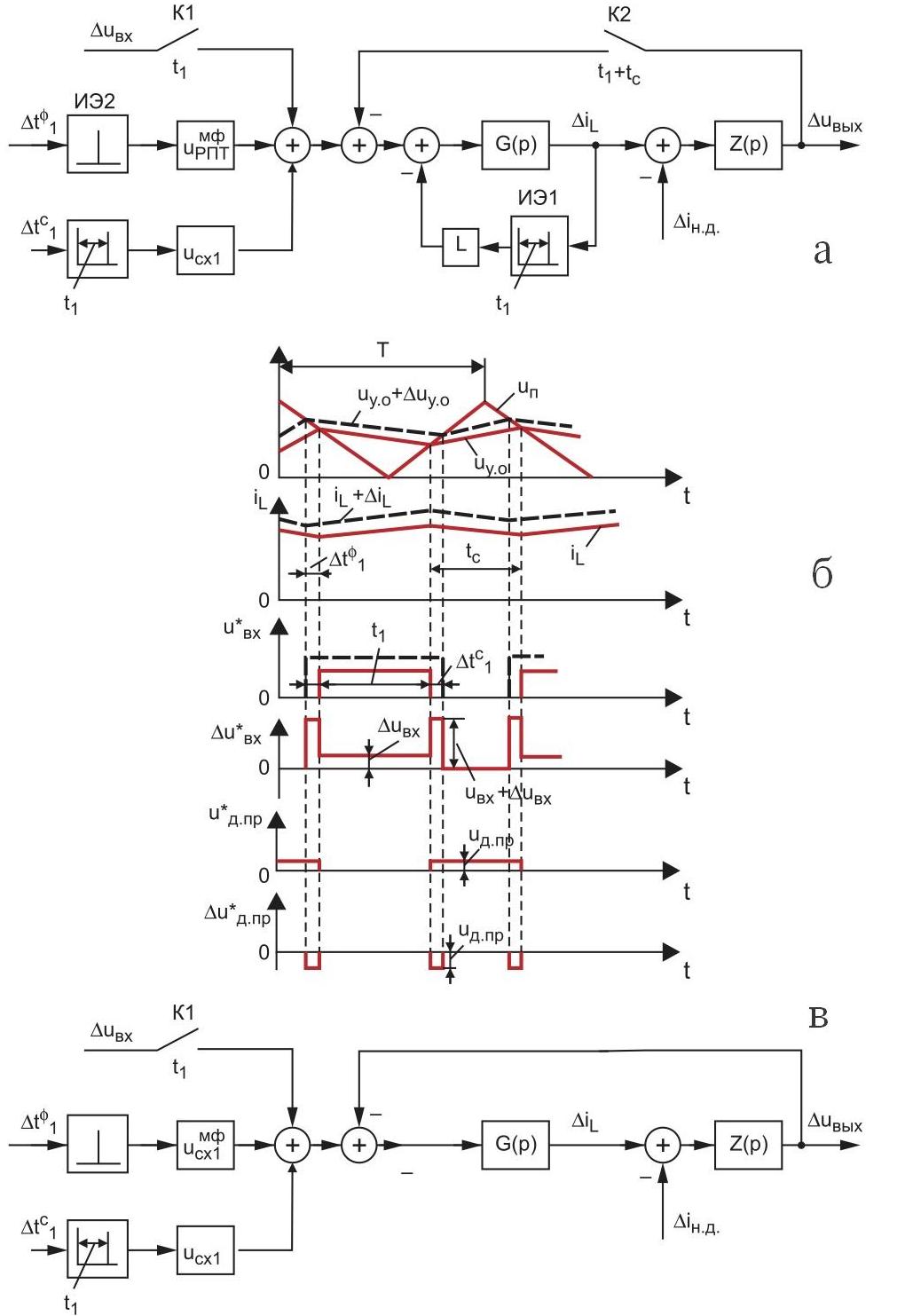
Рис. 7. Линейные импульсные структурные динамические модели силовой части понижающего ППН при двусторонней ШИМ для РПТ (а) и РНТ (в);
б) временные диаграммы, поясняющие особенности линеаризации в РНТ
Линеаризация двусторонней ШИМ
Во-первых, обратим внимание на то, что ШИМ должна быть устроена таким образом, чтобы длительность открытого состояния силового транзистора возрастала при увеличении напряжения на выходе усилителя ошибки uу.о(t) (рис. 5 и 7б). Как видно по рис. 5 и 7б, при малых вариациях Δuу.о(t) и отсчете времени от момента включения транзистора справедливы равенства:

Из этих равенств следуют линеаризованные соотношения для ШИМ:
Δt1ф = КфШИМΔuу.о(–0), Δt1с = КсШИМΔuу.о(t1–0), (5)
где КфШИМ, КсШИМ — коэффициенты усиления ШИМ при модуляции момента включения силового транзистора (модуляции момента фронта импульса) и модуляции момента выключения (спада) силового транзистора, определяемые выражениями

Выражения (6) могут быть представлены в виде:
КфШИМ = КфШИМFф, КсШИМ = КсШИМFс, (7)
где КфШИМ, КсШИМ — коэффициенты усиления ШИМ при uу.о = const, определяемые выражениями
а Fф, Fс — поправочные коэффициенты, называемые факторами пульсаций и рассчитываемые по формулам
- Белов Г. А. Нелинейные дискретные структурные динамические модели силовых частей импульсных ППН // Силовая электроника. 2014. № 3.
- Белов Г. А. Линеаризованные дискретные структурные динамические модели импульсных ППН при модуляции момента выключения силового транзистора // Силовая электроника. 2014. № 4.
- Белов Г. А., Лукаян Д. С. Устойчивость импульсного преобразователя с двусторонней ШИМ-2 // Электротехника. 2008. № 6.
- Белов Г. А., Серебрянников А. В., Гаранин С. Г. Расчет и анализ процессов в реверсивных импульсных преобразователях с двусторонней разностной широтно-импульсной модуляцией // Электричество. 2013. № 2.
- Белов Г. А. Импульсные преобразователи с системами управления на серийных микросхемах. Чебоксары: Изд-во Чуваш. ун-та. 2015.
- Цыпкин Я. З. Релейные автоматические системы. М.: Наука. 1974.
 8 октября, 2012
8 октября, 2012 13 апреля, 2020
13 апреля, 2020