
Система фазового регулирования резонансного преобразователя постоянного напряжения на серийных микросхемах
В настоящее время резонансные преобразователи постоянного напряжения (ППН) широко разрабатываются и внедряются в различные отрасли из-за возможности существенного уменьшения их массы и габаритов при сохранении высокого КПД. Регулирование выходного напряжения резонансных ППН в большинстве случаев осуществляется частотным методом [1, 2]. Реже из-за более сложной схемы управления используется фазовое регулирование. Вместе с тем фазовое регулирование имеет существенные преимущества, связанные с постоянной частотой переключений силовых транзисторов. Однако характеристики резонансных ППН при фазовом регулировании пока недостаточно исследованы [3–5]. В литературе мало информации по результатам разработок и исследований схем управления резонансными ППН с фазовым регулированием.
Фазовое регулирование осуществляется изменением задержки управляющих импульсов транзисторов одной стойки инверторного моста относительно другой. Сегодня на рынке электронных компонентов представлено ограниченное количество контроллеров фазового сдвига, пригодных для использования в резонансных ППН. К ним относятся, например, микросхемы ISL6752/53, LTC1922-1, UC3875, UC3879, UCC3895. Это, как правило, сравнительно сложные и дорогие микросхемы. В статье рассматривается схема управления резонансным ППН, построенная на дешевой микросхеме ШИМ-контроллера и аналогичная по структуре рассмотренной в [6] системе фазового регулирования ППН, построенного на базе инвертора напряжения с мягким переключением (переключение при нуле напряжения).
Для реализации системы управления выбран ШИМ-контроллер UC3823 благодаря высокому быстродействию и небольшому току запуска. Однако может быть использован любой недорогой высокоскоростной ШИМ-контроллер. На рис. 1 изображена блок-схема резонансного ППН с фазовым управлением, которая состоит из силовой части, пусковой схемы, ШИМ-контроллера UC3823, логической схемы преобразования сигнала и готового драйвера типа HIP4081A для управления силовыми МДП-транзисторами мостовой схемы инвертора. Входное напряжение ППН uвх подается на транзисторный мост через фильтр электромагнитных помех (ЭМП). На ШИМ-контроллер подается напряжение обратной связи через оптронную развязку и напряжение, пропорциональное входному току ППН, для реализации защиты от перегрузок по току. Пусковая схема служит для питания схемы управления на начальном этапе пуска ППН, когда конденсатор фильтра C1 заряжается через открытый транзистор VT5 до напряжения Uст – Uбэ, где Uст — напряжение стабилизации стабилитрона VD3, Uбэ — напряжение база-эмиттер открытого транзистора VT5. После окончания пуска схема управления ППН питается напряжением VCC на выходе двухполупериодного выпрямителя с нулевым выводом, состоящего из дополнительных обмоток силового трансформатора w31, w32, двух диодов и выходного LC-фильтра. Тогда конденсатор LC-фильтра C1 заряжается до напряжения VCC > Uст, напряжение база-эмиттер транзистора VT5, равное Uбэ = Uст – VCC, отрицательно. Поэтому транзистор VT5 запирается, отключая пусковую схему.
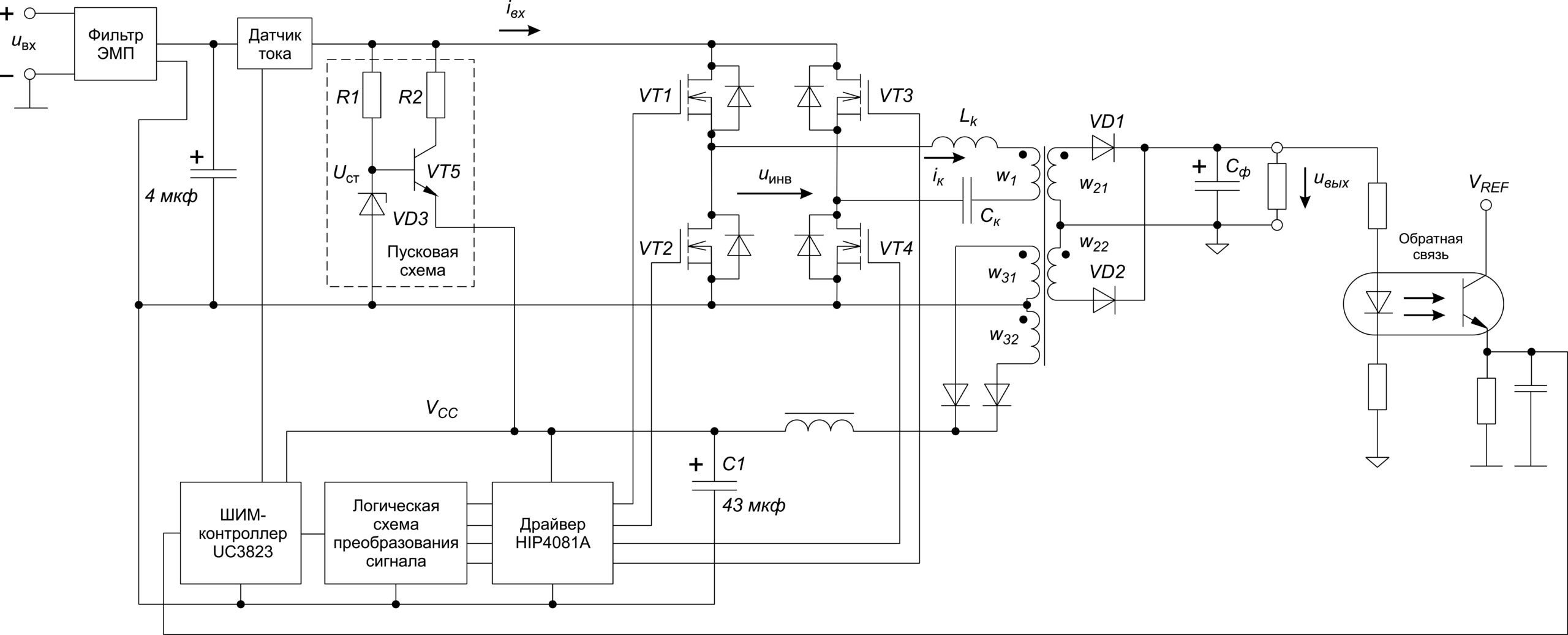
Рис. 1. Блок-схема резонансного ППН с фазовым управлением
При низких выходных напряжениях uвых< 20–30 В выходной выпрямитель ППН для повышения КПД выполняется по схеме с нулевым выводом, как показано на рис. 1, а при более высоких выходных напряжениях — по однофазной мостовой схеме.
На рис. 2 представлены идеализированные временные диаграммы отпирающих напряжений на затворах силовых МДП-транзисторов VT1–VT4, напряжения на выходе инверторного моста ППН uинв, токов намагничивания силового трансформатора im и в первичной обмотке этого трансформатора i1, напряжений на первичной обмотке u1 и на конденсаторе LC-контура uC. Как видно, отпирающие импульсы на затворах транзисторов VT3, VT4 запаздывают относительно импульсов на затворах VT1, VT2 соответственно на регулируемое время γTп, где Tп — половина периода переключений T = 1/f, γ — относительное время задержки, удовлетворяющее условию 0 ≤ γ ≤ γmax, γmax< 1.

Рис. 2. Временные диаграммы для ППН с фазовым регулированием в режиме непрерывного тока (РНТ)
На рис. 3а представлена логическая схема для преобразования сигнала uШИМ, получаемого с выхода ШИМ-контроллера, в импульсы, подаваемые на драйвер, формирующий импульсы управления для силовых МДП-транзисторов VT1–VT4 (рис. 1) [6]. Схема состоит из счетного триггера DD2, построенного на D-триггере с динамическим управлением по фронту входного импульса и четырех логических элементов (ЛЭ) «сложение по модулю 2». Используемый счетный триггер отличается тем, что исключаются гонки и неопределенные состояния. На асинхронные входы S и R триггера подаются уровни логической 1, равные VREF. Из временных диаграмм (рис. 3б) видно, как на выходах логической схемы формируются импульсы u3, u6, u8, u11, из которых затем в драйверах формируются отпирающие импульсы для силовых транзисторов VT1–VT4. При этом необходимо учитывать, что работа ЛЭ «сложение по модулю 2» отличается от функционирования ЛЭ ИЛИ только тем, что при подаче на оба входа уровней 1 на выходе получается уровень 0, а не 1, как в ЛЭ ИЛИ.

Рис. 3.
а) Логическая схема преобразования сигнала ШИМ-контроллера;
б) временные диаграммы для этой схемы, TШИМ — период ШИМ
К выходам ЛЭ, формирующим импульсы управления u8, u11 транзисторами VT3, VT4, подключены конденсаторы емкостью 2200 пФ, предназначенные для устранения помех, связанных с возможными «гонками сигналов».
Семейство микросхем UC1823, осуществляющих ШИМ-регулирование, оптимизировано для использования в качестве схем управления высокочастотными импульсными источниками питания [7]. При его проектировании особое внимание было уделено уменьшению времени задержки прохождения сигнала через компараторы и внутреннюю логику при одновременном увеличении ширины полосы пропускания и скорости нарастания выходного напряжения усилителя ошибки [7]. Назначение выводов микросхемы UC3823 представлено в таблице 1, а допустимые максимальные значения основных параметров — в таблице 2.
|
Вывод |
Описание |
|
|
Название |
№ |
|
|
Inv. |
1 |
Инвертирующий вход усилителя ошибки |
|
N.I. |
2 |
Неинвертирующий вход усилителя ошибки |
|
E/A Out |
3 |
Выход усилителя ошибки, соединенный с инвертирующим входом ШИМ-компаратора |
|
Clock |
4 |
Вход/выход синхронизации |
|
RT |
5 |
Вывод для подключения времязадающего резистора |
|
CT |
6 |
Вывод для подключения времязадающего конденсатора |
|
Ramp |
7 |
Неинвертирующий вход ШИМ-компаратора |
|
Soft Start |
8 |
Вывод для присоединения конденсатора цепи плавного пуска |
|
ILIM/S.D. |
9 |
Вывод ограничения тока или останова, на который извне подается напряжение, пропорциональное току |
|
Ground |
10 |
Вывод аналоговой «земли» |
|
ILIMREF |
11 |
Вывод компаратора ограничения тока (инвертирующий вход компаратора) для подачи опорного напряжения |
|
PWR Gnd |
12 |
Вывод силовой земли для выходного каскада микросхемы |
|
VC |
13 |
Вывод для подачи питания на выходной каскад |
|
OUT |
14 |
Выход двухтактного выходного каскада |
|
VCC |
15 |
Вывод для подачи напряжения питания на микросхему |
|
VREF 5,1V |
16 |
Выход внутреннего источника опорного напряжения |
|
Название параметра |
Значение |
|
|
Напряжение питания (выводы 15, 13) |
30 В |
|
|
Выходной ток, вытекающий или втекающий (вывод 14) |
Постоянный |
0,5 А |
|
Импульс (0,5 мкс) |
2 А |
|
|
Аналоговые входы (выводы 1, 2, 7, 8, 9, 11) |
–0,3…+6 В |
|
|
Выходной ток тактового генератора (вывод 4) |
–5 мА |
|
|
Выходной ток усилителя ошибки (вывод 3) |
5 мА |
|
|
Втекающий ток при плавном пуске (вывод 8) |
20 мА |
|
|
Зарядный ток генератора (вывод 5) |
–5 мА |
|
|
Рассеиваемая мощность при TA = +60 °C |
1 Вт |
|
|
Диапазон температуры хранения |
–65…+150 °C |
|
|
Температура припоя (пайка в течение 10 с) |
+ 300°C |
|
Блок-схема микросхемы UC3823 представлена на рис. 4. Ее основные особенности следующие:
- функционирование на частотах переключений: до 1 МГц;
- задержка прохождения сигнала через схему: 50 нс;
- полумостовой выход (максимальное значение тока 1,5 А), предназначенный для работы на емкостную нагрузку, такую как цепь затвора силового МДП-транзистора;
- широкополосный усилитель ошибки;
- ограничение тока в каждом периоде;
- плавный пуск/ограничение максимальной длительности выходного импульса;
- защита от пониженного напряжения питания с гистерезисом;
- небольшой пусковой ток: 1,1 мА;
- стабилизированный источник опорного напряжения: 5,1 В ±1%;
- исключение повторного импульса на выходе ШИМ в течение периода TШИМ (за счет асинхронного RS-триггера DD3 в схеме).

Рис. 4. Блок-схема микросхемы UC3823 (ЭП — эмиттерный повторитель)
Задающий генератор (ЗГ) (рис. 5) вырабатывает пилообразное напряжение uп(t) на выводе 6 (CT) и тактовые импульсы uт, синхронизирующие работу внутренних узлов микросхемы. Зарядный ток IC времязадающего конденсатора CT создается зеркалом тока, входной ток которого IR задается внешним резистором RT (схема зеркала тока не раскрыта), а выходной ток IC = IR = Uоп/RT, где Uоп = 3 В. Размах линейно изменяющегося (в данном случае нарастающего) участка пилообразного напряжения DUп = uп max – uп min, называемого прямым ходом пилы, удовлетворяет равенству:

откуда видно, что время прямого хода tпр определяется по формуле:


Рис. 5. Принципиальная схема задающего генератора микросхемы UC3823 (tD — «мертвое» время)
Максимальное значение пилы uп max = = Uпор1 = 2,8 В, где Uпор1 — верхнее пороговое напряжение компаратора DA1, при котором компаратор срабатывает, на его выходе появляется логический уровень 1, начинается формирование тактового импульса uт. Под действием импульса uт открывается транзистор VT2, через который теперь замыкается сумма тока IC и тока разряда конденсатора CT ICразр. В процессе разряда конденсатора напряжение на открытом транзисторе VT2 поддерживается равным напряжению на конденсаторе uп(t), которое больше 0. Поэтому открытый транзистор не насыщается, а остается в активном режиме с коллекторным током IVT2 = IC + ICразр ≈ h21э IбVT2, где h21э — коэффициент передачи тока базы транзистора VT2, IбVT2 = (Uт max – Uбэ) / R1 — отпирающий ток базы транзистора VT2; Uт max — амплитуда тактового импульса. Тогда ток разряда конденсатора CT определяется из равенства:

Когда конденсатор CT разряжается до нижнего порогового напряжения компаратора DA1 Uпор2 = 1 В, компаратор переключается в исходное состояние, его выходное напряжение снижается до уровня 0, транзистор VT2 закрывается, снова начинается заряд конденсатора CT и формирование прямого хода пилы. Время разряда конденсатора CT, называемого обратным ходом, определяется по формуле:

Время tобр в англоязычной литературе называется «мертвым» временем, обозначаемым через tD. Длительность выходного импульса микросхемы uШИМ не может быть больше 1/fШИМ – tD; fШИМ = 1/TШИМ. За время tобр открывается также транзистор VT1, вследствие чего на выводе 4 (CLK) формируется импульс синхронизации с амплитудой Uт max – Uбэ1, где Uбэ1 — падение напряжения база-эмиттер транзистора VT1.
На рис. 6а, б представлены взятые из [7] зависимости для определения сопротивления времязадающего резистора RT и мертвого времени tD для ЗГ. Например, при значениях RT = 3,65 кОм, СT = 1 нФ, DUп = 2,8 – 1 = 1,8 В, Uоп = 3 В по формуле (1) найдем:

Из графика на рис. 6б при СT = 1 нФ получим tобр = tD ≈ 0,15 мкс. Следовательно, частота переключений:

Примерно такое же значение получается и из графика на рис. 6а.

Рис. 6.
а) Зависимость сопротивления времязадающего резистора от частоты;
б) зависимость «мертвого» времени от емкости времязадающего конденсатора (3 ≤ RT ≤ 100 кОм)
Широтно-импульсный модулятор (ШИМ) (рис. 4) состоит из ШИМ-компаратора DA5, RS-триггера DD3 и ЛЭ ИЛИ-НЕ DD4. Временные диаграммы, поясняющие работу ШИМ, представлены на рис. 7.
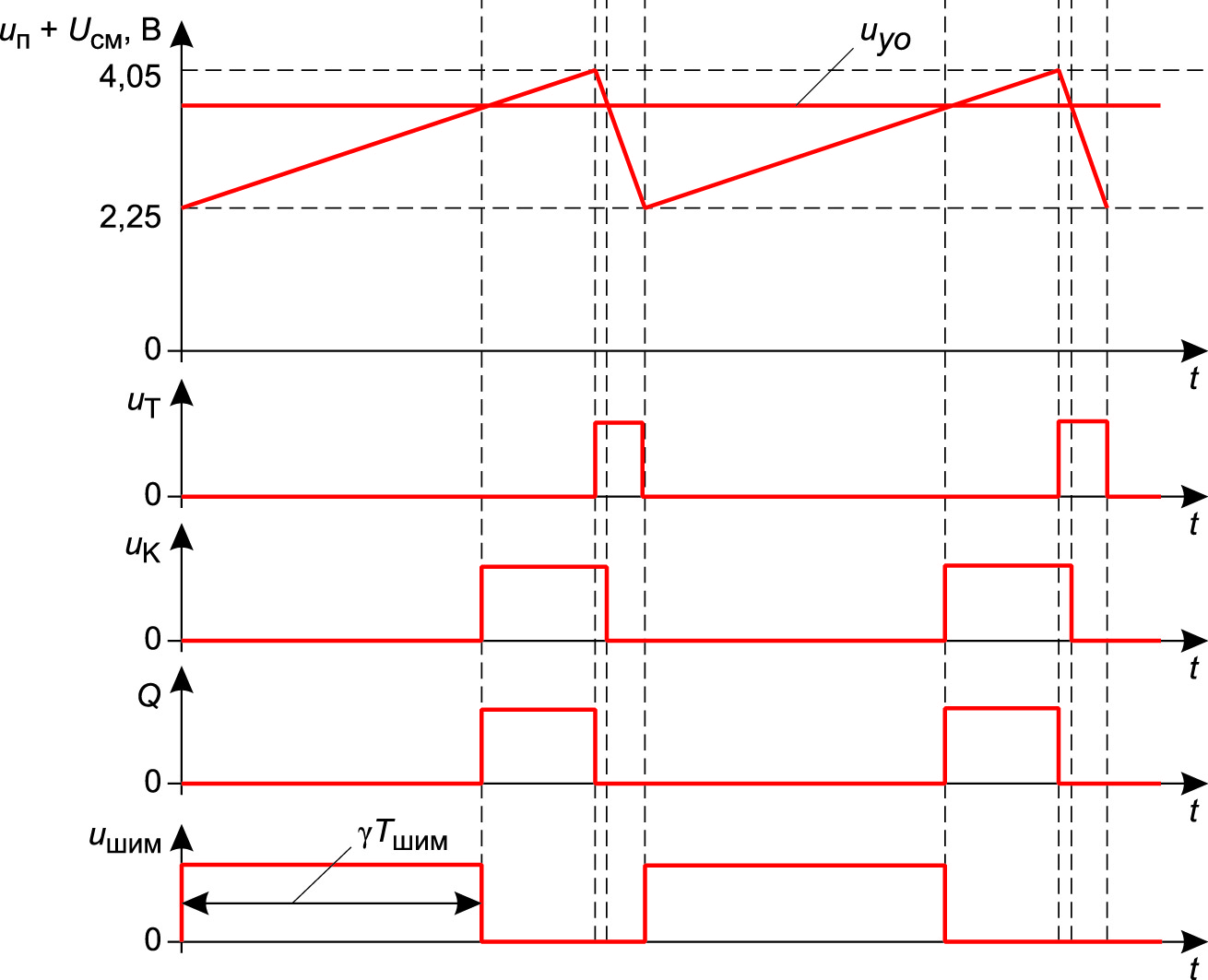
Рис. 7. Временные диаграммы, поясняющие работу ШИМ, в рассматриваемом случае TШИМ = Tп
Выходной логический уровень компаратора uк(t) через ЛЭ ИЛИ DD2 подается на S-вход триггера, на R-вход которого поступают тактовые импульсы uт. RS-триггер DD3 устанавливается в состояние 1 сигналом с выхода ШИМ-компаратора DD2, но может устанавливаться и сигналом с выхода компаратора ограничения тока DA2. Сброс RS-триггера DD3 осуществляется тактовыми импульсами, как показано на рис. 7. Срабатывание ШИМ-компаратора происходит в момент, когда сумма пилообразного напряжения uп(t) и напряжения смещения Uсм = 1,25 В превышает выходное напряжение усилителя ошибки uуо, которое подается на инвертирующий вход ШИМ-компаратора DA5 (рис. 4). Максимальное выходное напряжение УО uуо может изменяться в пределах 4–5 В, минимальное выходное напряжение — в пределах 0–1 В. Коэффициент усиления дифференциального сигнала УО
на низких частотах может составлять 60–95 дБ, частота единичного усиления 3–5,5 МГц.
Как видно на рис. 7, в пределах обратного хода пилообразного напряжения имеется небольшой промежуток времени, в котором на оба входа RS-триггера DD3 поступает запрещенная комбинация — два уровня 1. Если RS-триггер построен на двух ЛЭ ИЛИ-НЕ, то на этом промежутке будем иметь нулевые уровни на обоих его выходах, то есть Q = 1 и –Q = 1, что несущественно, поскольку благодаря наличию ЛЭ DD4 на выходе ШИМ формируется дискретный сигнал u ШИМ = uDD4 = Q˅uт, из которого указанный промежуток времени исключается. Регулируемые по длительности импульсы uDD4 с выхода ЛЭ ИЛИ-НЕ DD4 (рис. 4) поступают на выходной усилитель-формирователь микросхемы UC3823, на выходе которого 14 (OUT) получаются усиленные импульсы uШИМ.
Защита от перегрузок по току. При использовании микросхемы UC3823 в системах управления импульсными преобразователями с ШИМ на вывод 9 (ILIM) подается напряжение, пропорциональное току дросселя импульсного преобразователя, который на интервале γTШИМ монотонно нарастает. Если напряжение на выводе 9 (ILIM) в какой-то момент превышает пороговое напряжение компаратора DA2, и это происходит раньше момента t = γTШИМ, то уровень 1 с выхода компаратора DA2 проходит через ЛЭ И DD2 на S-вход триггера DD3, вызывая его срабатывание и выключение силового транзистора раньше момента t = γTШИМ. Таким образом происходит ограничение мгновенного значения тока на периоде TШИМ.
При использовании микросхемы UC3823 в системе управления резонансным ППН необходимо учитывать, что форма тока в силовой цепи в этом случае существенно отличается от формы тока в силовой цепи импульсного преобразователя. Как видно из кривой тока первичной обмотки силового трансформатора в РНТ i1 = iк (рис. 2), на интервале времени, когда одновременно открыты транзисторы VT1, VT4, ток через транзисторы нарастает, но не достигает своего максимального значения. Максимальное значение тока достигается на последующем интервале t2, когда в прямом направлении проводит ток транзистор VT1 и в обратном направлении — транзистор VT3 (либо проводит ток обратный диод, подключенный параллельно транзистору VT3). Следовательно, отсутствует возможность ограничения мгновенного значения тока на периоде Tп выключением транзистора VT1, поскольку в момент запирания транзистора VT1 максимальное значение тока еще не достигается и неизвестно. Однако, подавая на вывод 9 (ILIM) напряжение RДТi1, пропорциональное току в силовой цепи, можно организовать защиту от перегрузок по току (здесь RДТ — сопротивление передачи датчика тока). Если на некотором полупериоде Tп выполняется неравенство (RДТi1)max > (Uпор)DA3 = 1,4 В, компаратор DA3 (рис. 4) сработает, уровень 1 (с выхода DA3), пройдя через ЛЭ DD1, откроет транзистор VT2, конденсатор Cп цепи организации плавного пуска разряжается через транзистор VT2. Обратим внимание на то, что, поскольку при разряде конденсатора током (ICп)разр через транзистор напряжение коллектор-эмиттер транзистора VT2 (Uкэ)VT2 = uCп > 0, транзистор VT2 остается в активном режиме, с выхода ЛЭ DD1 потребляется ток:
где I1 = 9 мкА. Впрочем, эта подробность представляет интерес в основном для специалистов, рассчитывающих подобные электронные схемы.
Время разряда конденсатора Cп через транзистор VT2, определяющее задержку срабатывания защиты от перегрузок по току, рассчитывается по формуле:

где (UCп)max — напряжение, до которого был заряжен конденсатор Cп.
Напряжение uCп на конденсаторе Cп через транзистор VT1, включенный по схеме эмиттерного повторителя, поступает на неинвертирующий вход УО DA1, так же как опорное напряжение Uоп1, подаваемое на вывод 2 (NI), например, по схеме, показанной на рис. 8. Реальная схема в [7] не раскрывается, но о ней можно судить по другим материалам компании Texas Instruments. Например, при описании микросхем TPS40210 и TPS40211 [9] указано, что усилитель ошибки имеет два неинвертирующих входа, на один из которых подается постоянное опорное напряжение Uоп = 0,7 В, на другой через истоковый повторитель — напряжение с конденсатора цепи плавного пуска. Приоритет имеет неинвертирующий вход с меньшим напряжением.
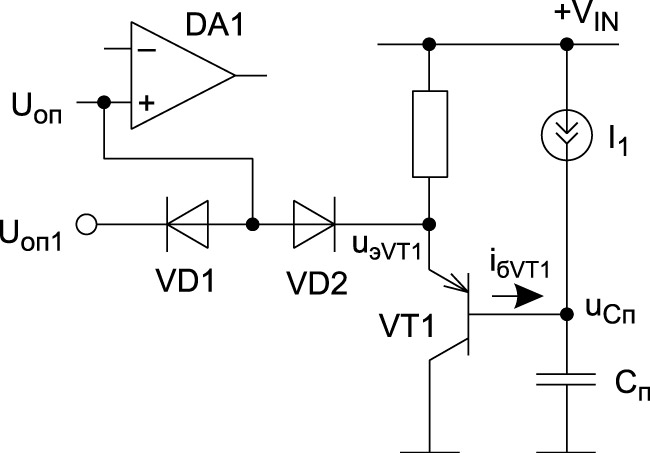
Рис. 8. Возможная схема подключения транзистора VT1 к усилителю ошибки для реализации плавного пуска и блокировки усилителя
Когда по мере разряда конденсатора Cп напряжение uCп + UэбVT1 становится меньше Uоп1, функции опорного напряжения УО переходят к напряжению uCп + UэбVT1, которое начинает снижаться. Это приводит к уменьшению длительности импульсов uШИМ, а также за счет замкнутой системы управления — к уменьшению выходного напряжения ППН и тока в силовой цепи. Однако из-за инерционности замкнутой системы управления ППН уменьшение тока силовой цепи начнется с некоторым запаздыванием после срабатывания цепи защиты от перегрузок по току. Когда ток уменьшится до значения тока срабатывания защиты, компаратор DA3 возвратится в исходное нулевое состояние, транзистор VT2 запирается, конденсатор Cп снова начинает заряжаться и т. д.
В микросхеме UC3823 реализуются стандартные механизмы защиты от чрезмерного снижения напряжения питания микросхемы VCC (UVLO), от перегрузок по току силовой части, а также плавный пуск.
Плавный пуск начинается с некоторой задержкой относительно момента времени, когда напряжение питания микросхемы VCC, подаваемое на вывод 15 (VCC), превышает верхнее пороговое напряжение гистерезисного компаратора DA4, равное 9,2 В. После этого начинается рост напряжения VREF на выходе источника опорного напряжения, поступающего на неинвертирующий вход компаратора DA6 и на вывод 16 (VREF) микросхемы. Когда напряжение VREF превышает пороговое напряжение компаратора DA6, равное 4 В, компаратор DA6 срабатывает, уровень 1 с его выхода поступает на нижний вход ЛЭ И-НЕ DD5, на верхний вход которого ранее уже поступил уровень 1 с выхода компаратора DA4. Тогда на выходе ЛЭ DD5 формируется уровень 0, который, пройдя через ЛЭ ИЛИ DD1, запирает транзистор VT2. Конденсатор Cп начинает заряжаться по закону:

током источника I1 = 9 мкА. При этом uэVT1 = uCп + UэбVT1, где (Uэб)VT1 — напряжение эмиттер-база транзистора VT1. Возможная схема подключения транзистора VT1 показана на рис. 8. Приоритет для УО имеет меньшее из напряжений Uоп1 и uэVT1.
Когда потенциал uэVT1< Uоп1, функции опорного напряжения УО выполняет напряжение uэVT1, поскольку именно оно поступает (через открытый диод VD2) на неинвертирующий вход операционного усилителя DA1. Тогда замкнутая система управления ППН обеспечивает слежение выходным напряжением uвых за нарастающим по мере заряда конденсатора Cп напряжением uэVT1 = uCп + UэбVT1 (с некоторой ошибкой), происходит плавное нарастание выходного напряжения ППН uвых, которое в общем случае через делитель напряжения с коэффициентом передачи Kд поступает на вывод 1 (INV).
В момент времени, когда начнет выполняться условие uэVT1 > Uоп1, функции опорного напряжения УО переходят к напряжению Uоп1, подаваемому на вывод 2 (NI), следовательно, далее обеспечивается стабилизация выходного напряжения ППН. Процесс пуска ППН завершается. После этого источник тока I1 необходимо отключить от конденсатора Cп. Как это достигается, в [7] не раскрывается.
Защита от чрезмерного понижения напряжения питания микросхемы (UVLO)
Напряжение питания микросхемы VCC поступает на источник опорного напряжения (рис. 4), где оно преобразуется в стабилизированное напряжение 5,1 В, которое не только применяется внутри микросхемы, но и, поступая на вывод 16 (VREF), может использоваться во внешних узлах схемы управления ППН. Когда напряжение VCC уменьшается до нижнего порогового напряжения компаратора DA4, равного 8,4 В, компаратор переключается в исходное состояние с уровнем 0 на выходе. При этом источник опорного напряжения отключается от напряжения VCC, его выходное напряжение начинает быстро снижаться и, когда оно снизится до 4 В, компаратор DA6 переключается в состояние 0. На обоих входах ЛЭ И-НЕ DD5 оказываются уровни 0, а на его выходе — уровень 1, который, пройдя через ЛЭ ИЛИ DD1, открывает транзистор VT2 и вызывает разряд конденсатора Cп, что уже было рассмотрено.
Когда начинает выполняться неравенство uэVT1 = uCп + UэбVT1< Uоп1, функции опорного напряжения УО переходят к напряжению uэVT1, что в данном случае несущественно, поскольку уже при переключении компаратора DA6 в состояние 0 происходит блокировка выхода микросхемы, то есть формирование управляющих импульсов на выводе 14 (OUT) прекращается, силовая часть ППН перестает переключаться.
Усовершенствованным вариантом микросхем UC3823 и UC3825 являются ШИМ-контроллеры UC3823A, UC3823B и UC3825A, UC3825B. С помощью внесения некоторых изменений в микросхемы было повышено их быстродействие [8]. Потребляемый ток
- Белов Г. А. Высокочастотные тиристорно-транзисторные преобразователи постоянного напряжения. М.: Энергоатомиздат, 1987.
- Белов Г. А., Серебрянников А. В., Павлова А. А. Анализ и расчет характеристик установившегося режима в преобразователе постоянного напряжения с последовательным резонансным инвертором // Практическая силовая электроника. 2015. № 4.
- Белов Г. А. Анализ характеристик резонансного преобразователя с фазовым регулированием методом основной гармоники. Информационные технологии в электротехнике и электроэнергетике (ИТЭЭ-2018). Материалы XI Всерос. науч.-техн. конф. Чебоксары. Изд-во Чуваш. ун-та, 2018.
- Глебов Б. А., Жигачев В. А. Мостовой резонансный DC/DC-преобразователь с фазовым управлением силовыми транзисторами // Практическая силовая электроника. 2015. № 1.
- Белов Г. А. Расчет переходных процессов и обоснование динамических моделей резонансного преобразователя постоянного напряжения с фазовым регулированием в режиме прерывистого тока // Электричество. № 5.
- 50W, 500 kHz, Full-Bridge, Phase-Shift, ZVS Isolated DC to DC Converter Using the HIP4081A. Application Note AN9506. www.renesas.com
- UC3823 High Speed PWM Controller. ti.com
- UC3823A High-Speed PWM Controller. ti.com
- TPS40210, TPS40211. 4,5V to 52V Input Current Mode Boost Controller. Режим доступа ti.com
 6 октября, 2021
6 октября, 2021 7 октября, 2021
7 октября, 2021