
Возможность самозапуска однофазного асинхронного двигателя
Математическая модель однофазного асинхронного двигателя
Для упрощения математической модели однофазного асинхронного двигателя (ОФАД) положим обмотку его статора подключенной к генератору переменного синусоидального тока ic = Icmsin(wt). Индукция магнитного поля, созданного током статора в воздушном зазоре двигателя, будет распределенной по гармоническому закону, а взаимная индуктивность M обмоток статора и ротора — зависящей от косинуса угла a между их осями:
M = Mm cos a. (1)
Положительное направление осей обмоток выбираем связанным с положительным направлением тока в них правилом правого винта.
В этом случае при положительных токах обмоток статора и ротора отклонение оси обмотки ротора вызывает электромагнитный момент mp, возвращающий ротор в состояние равновесия, соответствующее:
a = const = 0. (2)
Величина момента mp определяется выражением [1, 2]:
mp = –Gicip sin a, (3)
где ip — ток роторной обмотки, G = const, зависит от числа витков n обмотки ротора, его диаметра D и активной длины l, а также от коэффициента пропорциональности KB между индукцией в зазоре двигателя и током обмотки статора ic [1, 2]. При этом магнитная цепь двигателя полагается ненасыщенной, а двигатель — имеющим одну пару полюсов.
Цепь обмотки ротора описывается уравнением:

где L и r — индуктивность и активное сопротивление роторной обмотки.
Движение ротора в первом приближении без учета момента сухого и вязкого трения описывается уравнением:
где J — суммарный момент инерции ротора и нагрузки.
Статический режим двигателя
Рассмотрим статический режим, соответствующий a = const. Заметим, что существование подобного режима в данном случае возможно только при mp = 0.
В статике при неподвижном роторе уравнение (4) принимает вид:

стационарное решение которого очевидно:

где

Статический установившийся электромагнитный вращающий момент ротора:

Из формулы (7) следует наличие постоянной составляющей электромагнитного вращающего момента:

где

и переменной гармонической составляющей удвоенной частоты:

Обе составляющие электромагнитного вращающего момента обращаются в нуль при a = 0, p/2, p, 3p/2…
Очевидно, что при наличии на роторе трех симметричных обмоток их суммарный вращающий момент при пульсирующем поле статора равен нулю, что известно из теории асинхронных электрических машин.
Режим вращения ротора с постоянной скоростью
Режим вращения ротора с постоянной скоростью возможен при принудительном вращении ротора или при достаточно большом моменте инерции J, позволяющем не учитывать пульсации скорости, вызванные пульсирующей составляющей вращающего момента двигателя. В этом случае уравнение (4) принимает вид:

Стационарное решение уравнения (10) имеет две составляющие: одну с разностной частотой w– = w – Ω, а другую — с суммарной w+ = w+Ω:

где


где

Составляющие токов ротора (11) и (12) создают соответствующие вращающие моменты:

в сумме составляющие момент ротора.

Помимо переменных составляющих с частотами 2w, 2Ω, 2w–, 2w+, вращающий момент ротора (13) имеет и постоянную составляющую:

Полученное выражение позволяет определить частоту вращения идеального холостого хода ОФАД при питании статорной обмотки от генератора тока:

Исследование зависимости на экстремум дает уравнение, которому удовлетворяют стационарные точки:

где:

Динамический режим работы однофазного асинхронного двигателя
При питании статорной обмотки от генератора тока состояние двигателя определяют три фазовые координаты:
- угол поворота ротора;
- частота вращения ротора;
- ток обмотки ротора ip.
Уравнения (1)–(5) позволяют записать систему уравнений двигателя в форме Коши:
Очевидно, система уравнений (17) относится к нелинейным нестационарным системам дифференциальных уравнений.
Нетрудно проверить наличие четырех физически различимых стационарных решений системы уравнений (17). Первые два из них:

где

соответствуют неподвижному ротору с протекающим в его обмотке гармоническим током. Остальные два стационарных решения:

также соответствуют неподвижному ротору, но с нулевым током в его обмотке.
Следуя логике рассуждений, широко используемых в теории электрических машин и электропривода, можно предположить, что первая пара стационарных решений (18) системы уравнений (17) неустойчива, поскольку любое небольшое смещение ротора из положения равновесия вызывает вращающий момент, действующий согласно формуле (8) в направлении смещения. Аналогично можно ожидать, что два других положения равновесия (19) окажутся устойчивыми, поскольку любое небольшое смещение из положения равновесия вызывает вращающий момент, действующий в направлении, противоположном смещению. Если такая ситуация в действительности имеет место, то можно ожидать, что ротор двигателя займет одно из устойчивых положений равновесия. Запустить двигатель в этом случае можно только одним из известных способов: создавая на время запуска вращающееся магнитное поле, например с помощью дополнительной пусковой обмотки, или принудительно разогнав ротор до необходимой скорости.
Как известно [3], зависимость параметров системы от времени придает движению системы новые качественные особенности. Если в рассматриваемой системе все положения равновесия окажутся неустойчивыми, можно ожидать, что в результате установятся автоколебания ротора или даже произойдет самозапуск двигателя. Разумеется, что силы трения для этого должны быть достаточно малы.
Дальнейшее исследование можно провести аналитическими методами, методом физического моделирования или на математической модели. Наименее трудоемким и реально реализуемым является исследование на цифровой модели, например в системе MATLAB SIMULINK.
Иccледование динамики однофазного асинхронного двигателя на цифровой модели
На рис. 1 представлена цифровая модель однофазного асинхронного двигателя, построенная в системе MATLAB 6.5 SIMULINK 5.

Рис. 1. Цифровая модель однофазного асинхронного двигателя
При выбранных параметрах гипотетического двигателя r = 0,1 Ом, L = 0,02 Гн, Mm = 0,018 Гн, J = 9,6 кгм2, G = 0,08 Нм/А2, w = 100p с–1 Icm = 30 A вычислены параметры цифровой модели:
MmIcm = 0,54, G Icm /J = 0,2, 1/L = 50. Выбран метод моделирования ode23s при относительной погрешности 1e-8.
Моделирование двигателя при достаточно малых отклонениях от положения равновесия (19) (a = p/2 + Δa или a = 3p/2 + Δa) и нулевых начальных условиях по скорости и току (Ω = 0, ip = 0) показало медленно расходящийся колебательный процесс.
На рис. 2 представлены расходящиеся колебания при Da = 0,03 рад (≈ 1,72°). За 20 периодов амплитуда колебаний возросла всего лишь на 0,00018/0,03×100% = 0,6%. Уменьшение Da на порядок (Da = 0,003 рад) приводит к незначительному повышению частоты колебаний и несколько большему возрастанию амплитуды. За 20 периодов амплитуда колебаний возрастает на 0,00019/0,03 × 100% = 0,63%. Это позволяет полагать неустойчивость положения равновесия и «в малом».

Рис. 2. Расходящийся колебательный переходный процесс
В такой ситуации оказывается возможным самозапуск однофазного асинхронного двигателя. Положим, ротор находится в положении 0< a< p/2. При замыкании роторной обмотки начинается вращение ротора в сторону положения равновесия, соответствующего a = p/2, переходящее в расходящиеся колебания около этого положения равновесия. В некоторый момент времени при уменьшении a его значение станет отрицательным, как и вращающий момент, продолжающий уменьшать a, то есть вращать ротор к неустойчивому положению равновесия a = –p/2, (+3p/2) (19). «Проскочив» по инерции положение равновесия, ротор, преодолевая противодействующий вращающий момент, приблизится к положению равновесия a = –p, (+ p) (18) и при достаточном запасе кинетической энергии «проскочит» его. Электромагнитный вращающий момент, сменив направление, продолжит разгонять ротор в направлении по часовой стрелке и т. д. Результат моделирования, подтверждающий саморазгон однофазного асинхронного двигателя, представлен на рис. 3. Для сокращения интервала «самораскачивания» двигателя начальное положение ротора выбрано близким к положению равновесия a = 0 (a(0) = 0,03 рад).

Рис. 3. Процесс саморазгона однофазного асинхронного двигателя
Возможно, что возрастающие колебания ротора вначале превысят значение a = p. В этом случае ротор станет разгоняться в другом направлении (против часовой стрелки). При небольшом изменении a(0), например при a(0) = 0,032 рад, происходит самозапуск двигателя в противоположном направлении, как показывает результат моделирования, представленный на рис. 4.

Рис. 4. Процесс саморазгона однофазного асинхронного двигателя против часовой стрелки
Механическая характеристика однофазного асинхронного двигателя
Механической характеристикой однофазного асинхронного двигателя назовем зависимость постоянной составляющей электромагнитного вращающего момента двигателя от постоянной частоты вращения ротора (14). В действительности частота вращения имеет пульсирующую составляющую, вызванную пульсирующими составляющими вращающего момента (13). В реальности значительный момент инерции ротора и нагрузки делает пульсации частоты вращения пренебрежимо малыми, а зависимость (14) — практически совпадающей с реальной механической характеристикой.
На рис. 5 представлена механическая характеристика гипотетического однофазного асинхронного двигателя, цифровая модель которого рассмотрена выше. Ее построение выполнено в системе MATLAB по программе:

Рис. 5. Механическая характеристика гипотетического однофазного асинхронного двигателя
w=100*pi;r=.1;L=.02;Icm=30;G=0.08;Mm=0.018;N=G*Icm^2*Mm*r/4;x=0:.1:2*w; m=N.*x.*((w*L)^2-r^2-L^2.*x.^2)./ ((w-x).^2.*L^2+r^2)./((w+x).^2.*L^2+r^2); plot(m,x);grid.
Решение уравнения (16) дает два вещественных корня Ω2L2 = 38,2319 и Ω2L2 = 40,7449, что позволяет определить частоты, соответствующие максимальному вращающему моменту Ωm.вр. = 309,16 рад/с и максимальному тормозящему моменту Ωm.торм. = 319,16 рад/с, и соответствующие им вращающие моменты: 3,9850 нм и –4,1139 нм.
На рис. 6 представлен переходный процесс, вызванный приложением момента нагрузки Мн = 2 нм к двигателю, работающему в режиме идеального холостого хода. Расчетное значение скорости идеального холостого хода Ω0 = 314,11 рад/с. В результате моделирования получается чуть большее значение, поскольку расчетное значение получено для идеального случая отсутствия пульсаций скорости. Исследование показывает, что приложение момента нагрузки в момент времени t = 2 c вызывает увеличение пульсаций скорости от значения 0,005 рад/с до значения 0,17 рад/с. Среднее значение частоты вращения уменьшилось при этом до 312,8 рад/с. Постоянная составляющая электромагнитного вращающего момента, рассчитанная по формуле (14), составила ![]() . Отличие
. Отличие ![]() от Мн также вызвано принятым при расчете допущением. Колебания скорости вращения Ω с частотой примерно 4,3/10=0,43 Гц (2p*0,43=2,7 рад/с) вызваны низкочастотной составляющей пульсаций момента
от Мн также вызвано принятым при расчете допущением. Колебания скорости вращения Ω с частотой примерно 4,3/10=0,43 Гц (2p*0,43=2,7 рад/с) вызваны низкочастотной составляющей пульсаций момента ![]() (9) с частотой 2(w–Ω)=2*1,33=2,66 рад/с.
(9) с частотой 2(w–Ω)=2*1,33=2,66 рад/с.
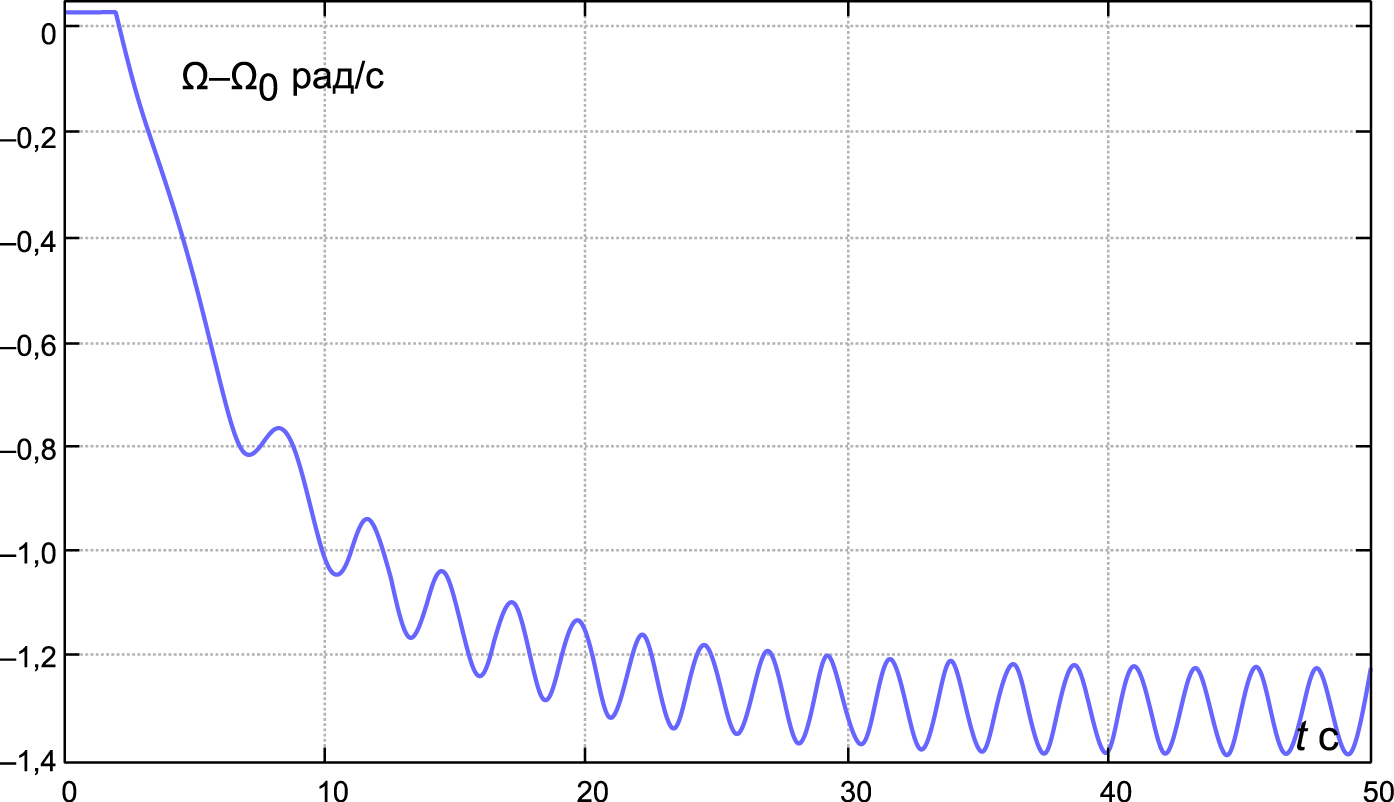
Рис. 6. Переходный процесс, вызванный приложением момента нагрузки к двигателю, работающему в режиме идеального холостого хода
Выводы
Возможность самозапуска однофазного асинхронного двигателя имеет более теоретическое, нежели практическое значение. Теоретическое значение состоит в демонстрации необходимости учета свойств электрических машин переменного тока, вызываемых их принадлежностью к динамическим системам с переменными параметрами. Возможность практического применения ограничена неоднозначностью направления вращения запускаемого двигателя и требованием малости сил трения или значительным форсированием тока статора во время пуска двигателя.
- Коршунов А. И. Математическая модель асинхронного трехфазного двигателя с фазным ротором, не использующая понятие вращающегося магнитного поля // Силовая электроника. 2019. № 6.
- Коршунов А. И., Хомяк В. А., Васильева И. Д. Частотно-токовый способ управления асинхронным трехфазным двигателем // Труды Крыловского государственного научного центра. 2020. Т. 4. № 394.
- Моисеев Н. Н. Асимптотические методы нелинейной механики. М.: Наука, 1981.
 12 мая, 2011
12 мая, 2011 13 апреля, 2020
13 апреля, 2020 30 января, 2018
30 января, 2018