
Математическая модель асинхронного трехфазного двигателя с фазным ротором, не использующая понятие вращающегося магнитного поля
Введение
Построенная во многих источниках [1–4] модель асинхронного двигателя исходит из существования в его воздушном зазоре кругового вращающегося магнитного поля, создаваемого системой синусоидальных напряжений, прикладываемых к фазным обмоткам статора, при соответствующих углах сдвига напряжений по фазе, а фазных обмоток — в пространстве.
Поскольку магнитное поле создают токи в обмотках АД, круговое вращающееся поле в его воздушном зазоре существует только при синусоидальных токах фазных обмоток. В переходных режимах токи при синусоидальных напряжениях не являются синусоидальными из-за наличия свободных (переходных) составляющих. Поэтому, строго говоря, при построении математической модели АД, пригодной как в установившихся, так и в переходных режимах работы, не следует исходить из существования в воздушном зазоре кругового вращающегося поля, что справедливо только в установившемся режиме.
В статье сделана попытка построить математическую модель АД с фазным ротором, исходя только из законов электротехники и закона Ампера, не используя сложные математические преобразования, уводящие, по мнению автора, от физической сущности процессов преобразования энергии в электрической машине, но не позволяющие получить аналитическое решение описывающих ее дифференциальных уравнений.
Вывод уравнений АД
При выводе уравнений АД примем следующие обычные допущения:
- магнитная цепь двигателя не насыщена;
- ток каждой фазы статора (A, B, C) вызывает в зазоре составляющую магнитной индукции, распределенную по гармоническому закону
![]()
где iq — ток фазы q; aq — угол, отсчитываемый от оси фазной обмотки в направлении, принятом за положительное; KB = const;
- обмотки статора и ротора соединены «звездой»;
- АД имеет одну пару полюсов;
- взаимоиндуктивность между обмотками статора и ротора зависит от косинуса угла между их осями:
![]()
где aqk — угол между осями обмотки статора и обмотки ротора, отсчитываемый от оси обмотки статора в направлении, принятом за положительное направление отсчета; Mm — максимальная взаимоиндуктивность, соответствующая совпадению осей обмоток;
- взаимоиндуктивности между обмотками статора одинаковы, отрицательны и равны –MS;
- взаимоиндуктивности между обмотками ротора одинаковы, отрицательны и равны –MR;
- пренебрегаем явлениями на концах ротора;
- не учитываем паразитные моменты асинхронного двигателя.
Состояние АД как динамической системы определяется тремя токами статора: iA, iB, iC, тремя токами ротора: iа, ib, iс, углом поворота ротора a и частотой его вращения W = da/dt. В действительности условие iA + iB + iC = 0, ia + ib + ic = 0 уменьшает число независимых токов статора и ротора на 2.
На рис. 1а, изображающем поперечное сечение АД-обмотки статора и ротора обозначены одним витком: AX, BY, CZ, ax, by, cz соответственно.

Рис. 1. Поперечное сечение АД
Положительное направление токов на рис. 1 обозначено крестиками и точками. Угол поворота ротора отсчитывается от оси обмотки фазы AX статора до оси обмотки ротора, обозначенной буквами ax, против часовой стрелки.
Электромагнитный вращающий момент Mr, действующий на ротор, создается силами взаимодействия токов ротора с магнитным полем, созданным токами обмоток статора. Для определения мгновенного значения электромагнитного вращающего момента Mr, действующего на ротор, достаточно знать мгновенные значения токов статора и ротора и угол поворота ротора относительно статора.
Для определения Mr воспользуемся подходом, аналогичным подходу, примененному при определении вращающего момента синхронного двигателя с постоянными магнитами на роторе (СДПМ) [5, 6]. Вначале определим вращающий момент каждой фазы ротора, вызванный взаимодействием ее тока с магнитным полем, создаваемым токами обмоток статора. Сумма вращающих моментов обмоток ротора даст значение Mr.
Рассмотрим момент, действующий на обмотку ax. Если положительное направление оси обмотки статора связано с положительным направлением тока обмотки правилом правого винта, то при положительном токе обмотки магнитная индукция в точке зазора, совпадающей с положительной полуосью обмотки, направлена от ротора к статору, считается положительной и имеет максимальное значение. В противоположной точке зазора индукция направлена от статора к ротору, считается отрицательной и имеет минимальное значение.
Выберем положительное направление оси обмотки ротора, связанное с положительным направлением тока в ней также правилом правого винта.
Нетрудно убедиться, что при положительных токах в обмотке фазы статора и в обмотке фазы ротора силы Ампера, действующие на активные проводники обмотки ротора, создают вращающий момент, направленный противоположно угловому отклонению оси обмотки ротора от оси обмотки статора (рис. 1б, в). При совпадении осей обмоток статора и ротора вращающий момент, создаваемый взаимодействием тока фазы k ротора и магнитного поля, созданного током фазы q статора, равен нулю. Причина в симметричном расположении проводников фазы k ротора относительно нулевых значений индукции магнитного поля, созданного обмоткой фазы q статора. При повороте ротора на угол a > 0 (рис. 1б) проводники обмотки фазы k ротора с током ia, направленным на нас, расположены в секторе:

Проводник с током обмотки фазы k, находящийся в середине сектора, создает при положительной индукции магнитного поля положительный вращающий момент (направленный против часовой стрелки).
![]()
где D — диаметр ротора; l — активная длина проводников обмотки ротора; ik — ток фазы k; Bq — индукция магнитного поля, созданная током фазы q статора; q = A,B,C, k = a,b,c.
С учетом выражений (1) формула (4) принимает вид:
![]()
Полагая равномерным распределение n витков обмотки ротора внутри сектора (3), получаем с учетом симметричной второй половины фазной обмотки суммарный электромагнитный вращающий момент (6),
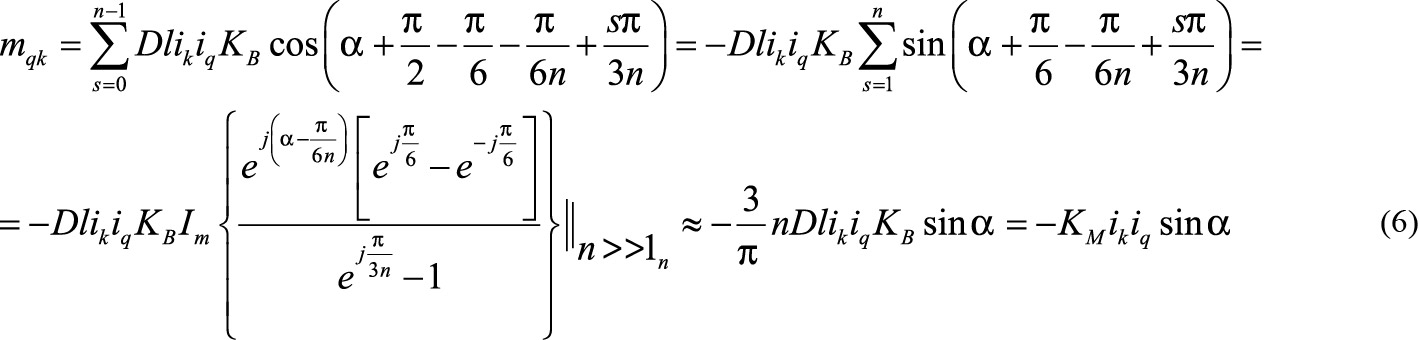
где 
Положим, что угол a отсчитывается от оси фазы обмотки A статора до оси обмотки фазы a ротора. Тогда, полагая, что оси статорных обмоток B и C сдвинуты относительно оси обмотки A в направлении, принятом за положительное, на угол 2p/3 и 4p/3 соответственно, как и оси обмоток фаз b и c относительно оси обмотки фазы a, можно записать выражения моментов, действующих на фазные обмотки ротора (7).

Суммарный электромагнитный момент, действующий на ротор, равен их сумме:
Mr = Ma + Mb + MC. (8)
Электрическая схема статора, представленная на рис. 2а, имеет три ветви, два узла и три контура. Электромагнитные процессы в обмотках статора описывает система трех уравнений, одно из которых составлено по первому закону Кирхгофа:
iA + iB + iC = 0, (9)
а два других уравнения составлены по второму закону Кирхгофа. Ниже записаны уравнения для всех трех контуров (10).

Рис. 2. Схемы обмоток:
а) статора;
б) ротора


где LS — индуктивность обмотки фазы статора; R — ее активное сопротивление; Mqk — взаимоиндуктивность обмотки фазы q статора и обмотки фазы k ротора; q = A, B, C; k = a, b, c; –MC — взаимоиндуктивность обмоток фаз статора.
Электрическая схема ротора, представленная на рис. 2б, также имеет три ветви, два узла и три контура. Электромагнитные процессы в обмотках ротора описывает система трех уравнений, одно из которых составлено по первому закону Кирхгофа:
ia + ib + ic = 0, (12)
а два других уравнения составлены по второму закону Кирхгофа. Ниже записаны уравнения для всех трех контуров: (13),


где Lr — индуктивность обмотки фазы ротора, r — ее активное сопротивление: Mqk — взаимоиндуктивность обмотки фазы q ротора и обмотки фазы k статора: q = a, b, c; k = A, B, C; MР — взаимоиндуктивность обмоток ротора.
Используя допущение (2), легко доказать равенства:
eA –eB – eC = 0, (15)
ea + eb + ec = 0. (16)
С учетом равенств (9), (15) и очевидного равенства uAB + uBC + uCA = 0 система дифференциальных уравнений электромагнитных процессов в статоре (9) допускает декомпозицию (17).

С учетом равенств (12) и (16) система дифференциальных уравнений электромагнитных процессов в роторе (13) также допускает декомпозицию:

Дифференцирование потокосцепления обмотки фазы статора q c обмоткой фазы k ротора дает:

где q = A, B, C; k = a, b, c. Из рис. 1а очевидно:
С учетом одинаковой частоты вращения обмоток ротора, равной скорости вращения ротора, получаем:

Электромеханические процессы в АД описываются уравнением движения ротора:

где J — суммарный момент инерции двигателя и нагрузки; MH — момент нагрузки, определяемый уравнениями (7) и (8).
Математическая модель АД, управляемого напряжениями на обмотках статора, описывается уравнениями (7), (8), (17)–(22).
С учетом равенства Mqk = Mkq можно угловые соотношения (20) подставить в уравнения электромагнитных процессов в статоре и роторе и исключить соотношения (20) из системы уравнений АД, что дает (17’), (18’).


Построение стационарного режима
Значительный интерес вызывает стационарный режим при линейных напряжениях, представляющих собой трехфазную симметричную систему напряжений. В этом случае, как известно,

То есть и фазные напряжения образуют симметричную трехфазную систему.
Желательным при постоянном моменте нагрузки Mн является режим постоянной частоты вращения ротора W = da/dt, синусоидальных токов статора и ротора, образующих симметричные трехфазные системы, и постоянный вращающий момент АД Mr, равный моменту нагрузки.
Будем искать решение двух систем уравнений (17’) и (18’) в виде

при постоянной частоте вращения W v = w – W, a = a0 + Wt (v — абсолютное скольжение).
Подстановка в систему уравнений (17’) приводит ее к трем одинаковым уравнениям, отличающимся только сдвигом по фазе гармонических функций:

Аналогично система уравнений (18’) переходит в систему трех уравнений:

Из уравнений (23), (24) можно вычислить четыре параметра, определяющих стационарный электромагнитный режим статора и ротора: Ims, js, и Imr, jr.
Наиболее просто это сделать с помощью метода комплексных амплитуд. Для уравнений, соответствующих i = 0, выполним подстановку t = t + (p/2)/w в уравнении (23) и t = t + (p/2)/ν — в уравнении (24) и, умножив обе части полученных на мнимую единицу j, сложим их с исходными уравнениями. Использовав формулу Эйлера и сократив обе части комплексных уравнений на e—jwt и e—jwt соответственно, получаем систему двух комплексных уравнений:

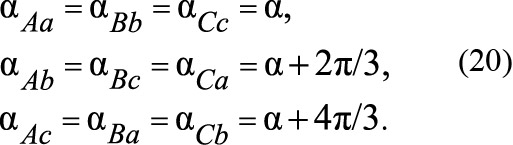
Решение системы уравнений (25) имеет вид:

где:
Решение (26) системы уравнений (23), (24) определяет амплитуды фазных токов статора и ротора:

и их фазы:
φs = Ψr – φΔ, φr = α0 +π/2– φΔ . (28)
Для определения вращающего момента, создаваемого обмоткой фазы a ротора Ma, подставим выражения токов в стационарном режиме в уравнения (6) и (7), что дает:

Аналогично получаем:

В результате сложения вращающих моментов фазных обмоток ротора, согласно формуле (7), составляющие момента, пульсирующие с частотой 2v, уничтожаются, что дает:

Подстановкой в формулу (29) выражений (27) и (28) получаем:

Учет выражения
![]()
в последней формуле дает:

где

Исследование зависимости вращающего момента АД от абсолютного скольжения v дает две симметричные стационарные точки:
![]()
Положительная стационарная точка соответствует максимуму, а отрицательная — минимуму вращающего момента:

Из выражения (30) следует, что в стационарном режиме вращающий момент АД постоянен, не зависит от углового положения ротора и пропорционален квадрату напряжения питания, что подтверждает известные факты. Характер зависимости вращающего момента АД от скольжения Mr(n) также совпадает с известным ее характером.
Цифровая модель асинхронного двигателя
Полученная математическая модель АД существенно нелинейна, что не позволяет получить аналитическое решения ее дифференциальных уравнений, за исключением частных случаев. Поэтому для исследования процессов в АД в системе Mathlab Simulink построена его цифровая модель, представленная на рис. 3. Схема блока subsystem изображена на рис. 4.
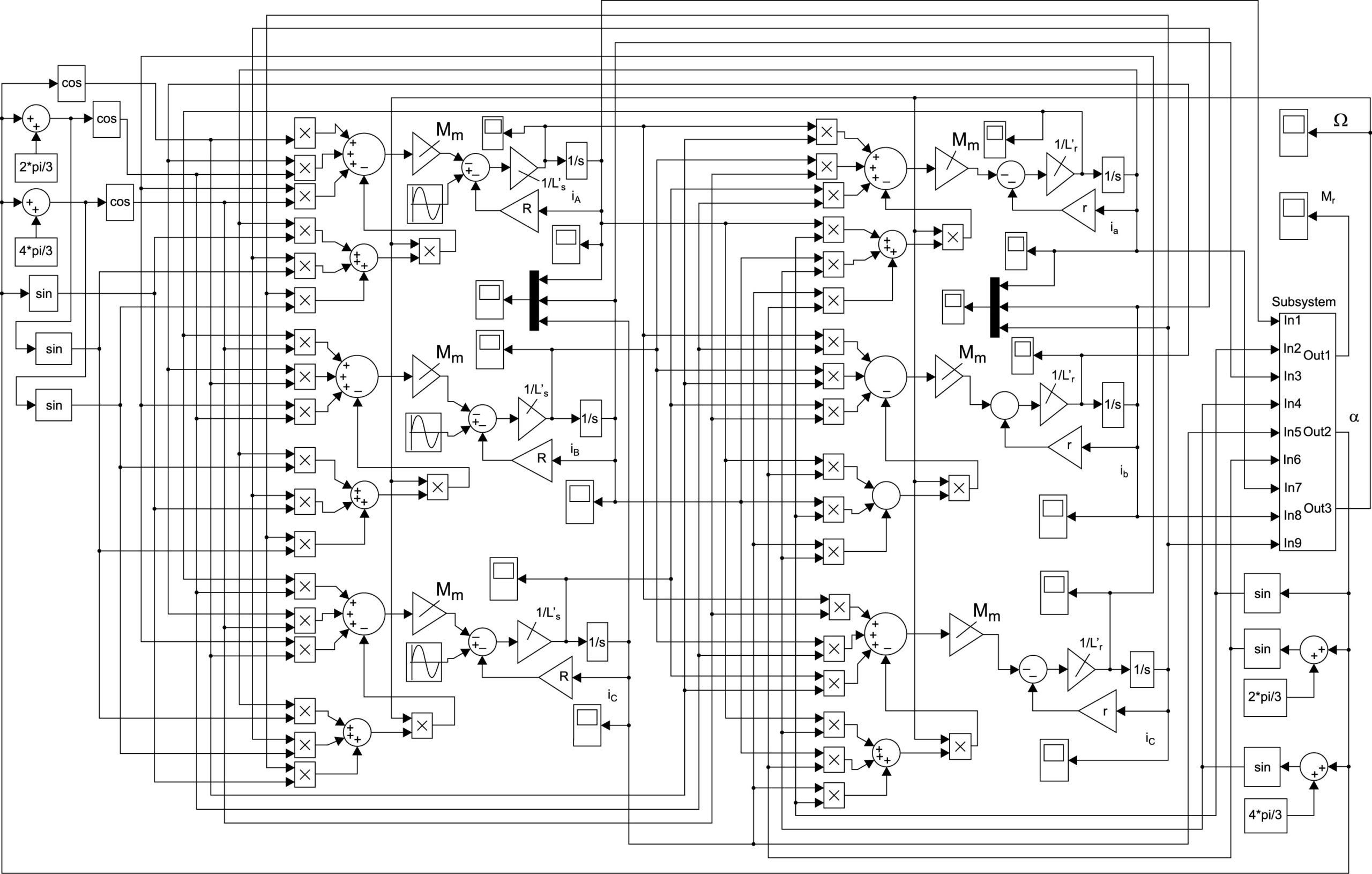
Рис. 3. Цифровая модель АД

Рис. 4. Схема блока subsystem
Для оценки корректности цифровой модели желательно иметь аналитическое решение дифференциальных уравнений хотя бы для частного случая. Таковым оказывается случай заторможенного АД. Электромагнитные процессы здесь описывает система линейных дифференциальных уравнений. Переход к изображениям по Лапласу при нулевых начальных условиях и системе трехфазных напряжений приводит ее к виду (35), где Ik, Uq — изображения по Лапласу ik, k = A, B, C, a, b, c и uq, q=A, B, C,


Система линейных уравнений (35) имеет решение:

где:

Uq, q = 1, 2, 3 — изображения по Лапласу напряжений

Используя выражения (36), несложно определить амплитуды фазных токов статора ISm и ротора Irm:

Выполнив обратное преобразование Лапласа в выражениях (36) и подставив выражения фазных токов в формулу вращающего момента (7) и (8), можно получить аналитическое выражение зависимости Mr(t) при заторможенном роторе АД. Чтобы избежать трудоемких преобразований и громоздких формул, можно использовать имитационное моделирование в системе Mathlab SIMULINK по структурной схеме, представленной на рис. 5.
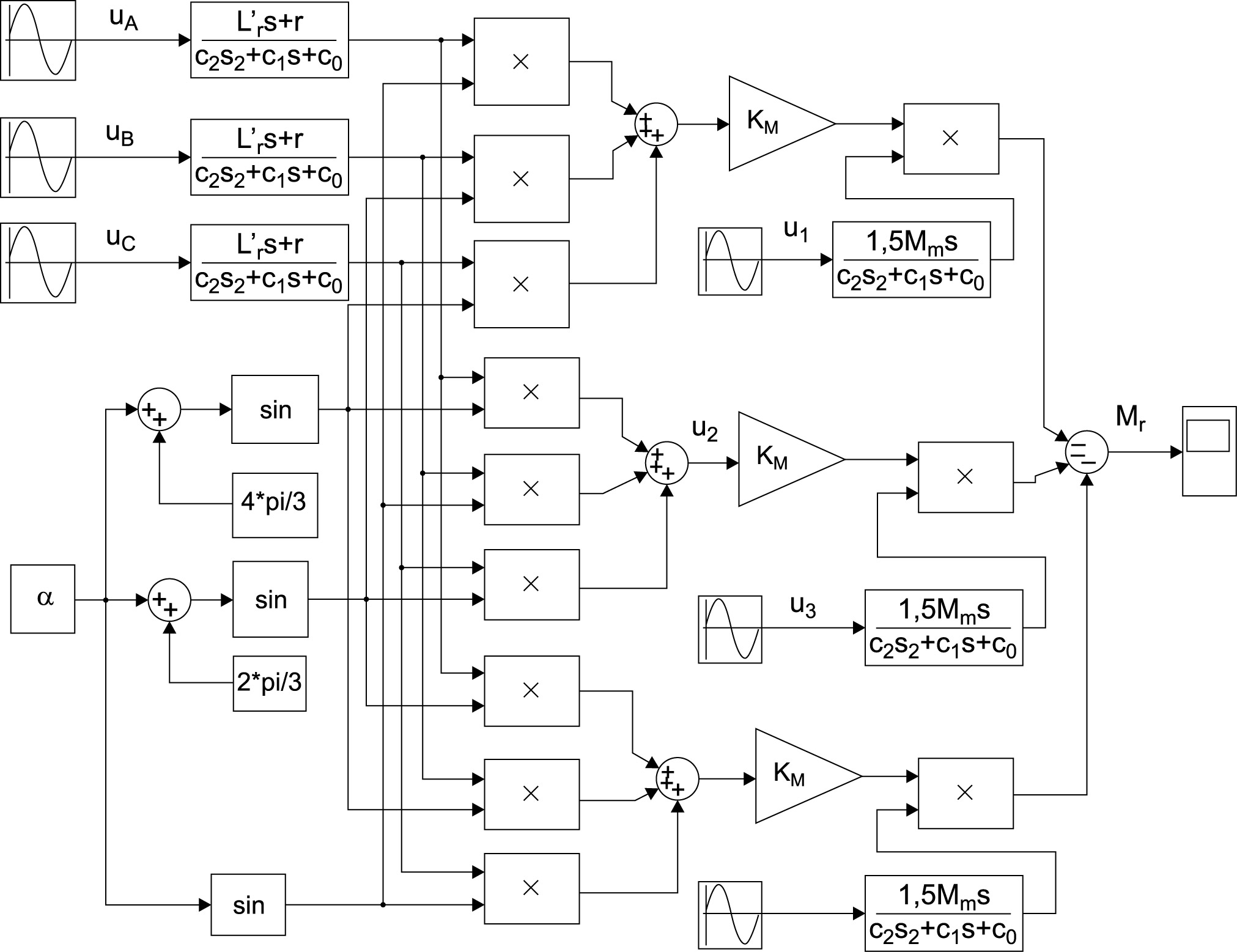
Рис. 5. Структурная схема заторможенного АД
Применение модели к анализу процессов в АД
Для применения полученных результатов рассмотрим гипотетический АД небольшой мощности, ротор которого имеет диаметр D = 0,4 м, а длину l = 0,6 м. Положив среднюю плотность ротора несколько большей плотности железа и равной 8 × 103 кг/м3, получаем момент инерции ротора J = 3,84·p кгм2. C учетом полюсного деления t = pD/6 = 209 мм, приняв зубцовое деление порядка 5 мм, можно выбрать число витков обмотки фазы ротора n = 40. Приняв ориентировочно площадь эффективного сечения провода обмотки S = 8 мм2, длину фазовой обмотки lo = 2(D + l)n = 80 м, удельное сопротивление меди при температуре 75 °С равным 1/47 × 10-6 Ом·м [2], получаем ориентировочное значение сопротивления r = 0,2 Ом. Приняв воздушный зазор d = 3 мм, обмоточный коэффициент kоб = 0,95, получаем согласно [2] главную индуктивность фазы порядка 0,09 Гн. Положив индуктивность рассеяния составляющей 10% от главной индуктивности, получаем Lr = 0,1 Гн. Положим для простоты параметры обмоток статора и ротора одинаковыми. Примем взаимоиндуктивность обмоток статора и ротора равной главной индуктивности, то есть Mm = 0,09 Гн, MС = MР = 0,045 Гн, получаем L‘s = L‘r = 0,145R Гн, R = r = 0,2 Ом. Определив ориентировочное значение коэффициента KB = m0n/2d = 8,4 × 10-3 Тл/А, вычисляем коэффициент KM (6), равный 0,0768 Нм/А2.
Для выбранных параметров АД по формуле (27) для Um = 311 B, w = 100p 1/c рассчитана зависимость электромагнитного вращающего момента от абсолютного скольжения Mr(v). На рис.6 построена зависимость Mr от относительного скольжения s = n/w.

Рис. 6. Зависимость электромагнитного момента ротора Mr от относительного скольжения s = v/ω
По формулам (29) и (30) вычислены значения vm=10,352 1/c, (sm=0,033), Mrm=27,357 Нм. Подставив в формулу (27) v = w, получаем Mr п =1,8489 Нм.
Использование полученной модели АД для анализа переходных процессов дает пример построения электромагнитного процесса при включении трехфазного напряжения с амплитудой Um = 311 В и частотой w = 100p 1/с при постоянной синхронной частоте вращения ротора W=w и приложении момента нагрузки MН = 15 Нм после окончания электромагнитного переходного процесса. До окончания электромагнитного переходного процесса вращающий электромагнитный момент Mr в модели был отключен от двигателя. Временные диаграммы Mr, W, токов статора и ротора: iA, iB, iC, ia, ib, ic, (рис. 7). Моделирование проводилось в системе MATHLAB 6.5 SIMULINK 5 методом ode 23 при относительной погрешности 1×10-6.

Рис. 7. Временные диаграммы Mr, W, токов статора и ротора: iA, iB, iC, ia, ib, ic
Для проверки корректности цифровой модели АД, представленной на рис. 3, проведено моделирование процесса, вызванного приложением трехфазного напряжения Um=311 В и частотой w = 100p 1/с при заторможенном роторе. Значения ISm = 51,161 A, Irm = 47,633 A, Mr = 1,8489 Н·м в установившемся режиме совпали со значениями определенными аналитическим методом, и со значениями, рассчитанными по формулам для стационарного режима (27) и (31) при v = w. Зависимости Mr(t) в переходном режиме , полученные аналитическим методом и путем моделирования, совпадают с высокой точностью. Например, максимальное значение Mr и момент его достижения, определенные путем моделирования и аналитическим методом, составляют 27,627 и 27,626 Н·м, 0,17472 и 0,17477 с соответственно.
Выводы
- Математическая модель АД, построенная без использования предположения о существовании кругового вращающегося поля в его воздушном зазоре и различных преобразований координат, подтверждает все основные свойства АД в переходных и установившихся режимах.
- Модель справедлива при любом характере изменения параметров трехфазной системы напряжений питания обмотки статора (частоты и величины напряжений).
3. Построенная цифровая модель АД позволяет исследовать процессы изменения токов статора и ротора, вращающего электромагнитного момента, частоты вращения ротора как в переходных, так и в установившихся режимах и выбирать наиболее благоприятные соотношения параметров двигателя.
- Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. Госэнергоиздат, 1963.
- Копылов И. П. Электрические машины. Учебник для вузов. М.: Энергоатомиздат, 1986.
- Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. Учебник для вузов. М.: Академия, 2006.
- Усольцев А. А. Частотное управление асинхронными двигателями. Учебное пособие. СПб., СПбГУ ИТМО, 2006.
- Коршунов А. И. Построение математической модели синхронного двигателя с постоянными магнитами на роторе // Электротехника. 2009. № 1.
- Коршунов А. И. Электромагнитный момент синхронного двигателя с постоянными магнитами // Известия вузов. Приборостроение. 2015. Т. 58. № 1.
 17 января, 2008
17 января, 2008 17 апреля, 2020
17 апреля, 2020 27 ноября, 2014
27 ноября, 2014