
Определение и поддержание оптимального скольжения при частотно-токовом способе управления асинхронным трехфазным двигателем
Введение
Упомянутый в заголовке способ управления асинхронным двигателем (АД) основан на поддержании оптимальной частоты токов ротора (оптимального абсолютного скольжения νОРТ), соответствующей максимальному электромагнитному моменту ротора, и управлении величиной момента путем регулирования токов статора [1].
На рис. 1 представлена функциональная схема замкнутой нереверсивной системы регулирования частоты вращения АД, управляемого токами статора. Схема отличается от традиционных схем привязкой частоты токов статора ω к частоте вращения ротора АД Ω. Схема относится к случаю одной пары полюсов АД и возможности рекуперативного торможения. В зависимости от знака отклонения частоты вращения АД Ω от заданного ее значения ΩЗ (ΔΩ = ΩЗ – Ω) частота токов статора увеличивается или уменьшается на частоту токов ротора, соответствующую экстремальному значению электромагнитного момента АД Mr. Таким образом:

где r — активное сопротивление фазы ротора, LrЭ — ее эквивалентная индуктивность, учитывающая взаимную индуктивность фаз ротора.

Рис. 1. Функциональная схема системы регулирования частоты вращения АД, управляемого токами статора
Амплитуда токов статора регулируется по замкнутому контуру пропорциональным регулятором с достаточно большим коэффициентом усиления K (рис. 1). Благодаря привязке частоты токов статора к скорости АД регулятор амплитуды токов устанавливает наименьшую возможную амплитуду токов при данном моменте нагрузки MН.
Система регулирования частоты вращения АД позволяет в переходных режимах в зоне насыщения использовать максимальный электромагнитный момент двигателя, соответствующий уровню ограничения амплитуды токов якоря Im max и частоте токов в роторе, согласованной с экстремумом электромагнитного момента АД.
Основная проблема, возникающая при реализации частотно-токового способа управления АД, заключена в нестабильности параметров его ротора — r и LrЭ, вследствие изменения его температуры и степени насыщения магнитопровода. Измерение r и LrЭ, необходимых для вычисления vОРТ, во многих случаях оказывается технически слишком сложной задачей. Очевидный путь решения проблемы — отказ от измерения r и LrЭ в пользу непосредственного измерения vОРТ.
Работа АД с постоянным скольжением, соответствующим максимальному вращающему моменту, идеальна для переходных режимов, поскольку обеспечивает наибольшее быстродействие. Для установившихся режимов решающее значение имеют энергетические показатели, особенно при использовании аккумуляторных батарей в качестве источника энергии. Если режим максимального вращающего момента существенно уступает по энергетическим показателям, то имеет смысл поддерживать разные значения оптимального скольжения в переходных и в установившихся режимах. Ниже определено оптимальное значение скольжения vОРТ1, соответствующее минимуму энергии, потребляемой АД в установившемся режиме, и способ его экспериментального определения и поддержания в процессе работы.
Определение оптимального скольжения
Логично ожидать, что в стационарном режиме при постоянных частоте вращения Ω и моменте нагрузки MН = Mr в рассматриваемой функциональной схеме рис. 1 обеспечивается минимум потребляемой АД мощности при vОРТ. Доказав это, можно предложить способ определения vОРТ по минимуму потребляемой мощности при постоянных значениях частоты вращения Ω и момента нагрузки MH = Mr и изменяющемся скольжении v.
Исходными данными для анализа выберем выражение установившегося вращающего момента АД, полученное в [1]:

где Ims — амплитуда установившегося тока фазы статора АД; CM — конструктивная постоянная АД, и уравнение электрического равновесия для фазной обмотки статора АД в стационарном режиме (uФ = Um cos(ωt), iФ = Ims cos(ωt — js)), полученное в статье [2]:

где

Mm — максимальная взаимоиндуктивность фаз статора и ротора АД; ω = Ω + v.
В стационарном режиме АД потребляет от источника питания (трехфазного генератора тока) мощность, определяемую выражением:

Определив из уравнений (2) и (3)

и подставляя в формулу (4), получаем:

Исследование полученного выражения на экстремум дает две стационарные точки:
Как следует из выражения (8), |vОРТ1|< vOPT = r/LrЭ. Можно предположить, что при нагреве АД под нагрузкой величина отношения r/R изменяется незначительно, как и величина отношения Mm/LrЭ при изменении степени насыщения магнитопровода. Это позволяет полагать vОРТ пропорциональными и определить коэффициент пропорциональности экспериментально.
В двигательном режиме при постоянных значениях частоты вращения Ω и момента нагрузки MН получены относительные значения мощности, потребляемой АД в двух случаях:

Таким образом, относительное превышение минимальной мощности при скольжении, оптимальном по вращающему моменту, составляет:

Из выражения (10) очевидно, что относительный выигрыш в потребляемой мощности резко снижается при увеличении частоты вращения АД Ω. При параметрах АД, использованных в статье [2]: R = r = 0,2 Ом, Mm = 0,09 Гн, LrЭ = 0,145 Гн, k = (1,5 Mm/LrЭ)2 = 0,86683, — рассчитан относительный выигрыш для двух значений Ω:

Полученный результат показывает, что при ν= νОРТ потребляемая АД мощность незначительно превышает минимальную, и даже в крайнем случае, при превышении минимальной мощности, не превосходит 5%.
Отношение вращающих моментов АД (2) при νОРТ и νОРТ1 составляет:

Как видно из полученного результата, уменьшение νОРТ в √1+kr/R = √1,86683 = 1,3663 раз приводит к уменьшению Mr практически в 2 раза. Поэтому при работе в стационарном режиме с ν = vОРТ1 необходимо перед началом переходного режима перейти от ν = νОРТ1 к ν = νОРТ.
Поддержание оптимального скольжения
Для многих электроприводов, например в системах электродвижения на транспорте, основным режимом работы является установившийся режим с постоянной скоростью и постоянным моментом нагрузки. Поддержание скольжения, оптимального по потреблению энергии, из-за естественного изменения параметров АД требует его непрерывной коррекции.
Эту задачу можно решить с помощью поисковой системы экстремального управления (СЭУ) с запоминанием экстремума показателя качества [3], которым в этом случае является потребляемая АД мощность Р, а регулируемым параметром — абсолютное скольжение ν. Функциональная схема СЭУ представлена на рис. 2.

Рис. 2. Функциональная схема СЭУ
В основе действия этой системы лежит следующий принцип поддержания экстремума (минимума) потребляемой мощности. Исполнительный элемент ИЭ принудительно с малой скоростью изменяет скольжение ν — параметр объекта управления (ОУ). Показатель качества — потребляемая АД мощность при этом проходит экстремальное (минимальное) значение, которое фиксируется запоминающим элементом (ЗЭ). Сравнивающий элемент (СЭ) сравнивает текущее значение мощности с запомненным ее минимальным значением. При достижении разностью РЗУ – Р порогового значения d (d< 0) логическое устройство (ЛУ) производит реверс ИЭ. Параметр v начинает изменяться в противоположном направлении, и вновь Р возвращается к минимуму и заново запоминается в ЗЭ. При достижении РЗУ – Р порогового значения d происходит вторичный реверс ИЭ, и цикл работы повторяется. Вследствие этого устанавливается режим автоколебаний относительно экстремальной точки (минимума мощности, потребляемой АД). Часто зависимость показателя качества от настраиваемого на экстремум параметра обладает четной симметрией относительно точки экстремума. При достаточно низкой скорости поиска по сравнению со скоростью процессов в ОУ в СЭУ устанавливаются автоколебания, близкие к симметричным. Размах колебания показателя качества равен модулю порога срабатывания ЛУ. При минимизации полной мощности, потребляемой приводом, представленным на рис. 1, в случае Е = const, достаточно минимизировать постоянную составляющую тока, потребляемого инвертором.
Логическое устройство осуществляет изменение направления поиска при каждом достижении РЗУ – Р порогового значения d. Его логическая функция подобна функции статического триггера в режиме счетного входа. Логическую функцию ЗЭ в аналоговой форме легко реализовать с помощью пикового детектора со сбросом напряжения на конденсаторе до значения входного напряжения ЗЭ в момент срабатывания ЛУ.
Разумеется, современные микропроцессоры позволяют программную реализацию СЭУ. При этом проще не запоминать экстремум показателя качества, а оценивать знак его приращения на каждом шаге поиска. Например, при поиске минимума потребляемой мощности направление поиска следует изменять на противоположное, если ее приращение на очередном шаге становится положительным.
На рис. 3 над пунктирной разделительной линией представлена цифровая модель системы регулирования частоты вращения АД, управляемого токами статора (рис. 1), построенная в системе Mathlab Simulink. При этом трехфазный регулятор токов статора полагается идеальным управляемым генератором тока [1]. Под разделительной линией расположена цифровая модель шаговой поисковой системы экстремального управления, определяющей и поддерживающей абсолютное скольжение v (частоту токов ротора), соответствующее минимуму мощности Р, потребляемой АД при постоянных скорости Ω и моменте нагрузки МН. Принцип действия ее основан на оценке знака приращения мощности на выбранном временнóм интервале T при изменении v с малой скоростью dν/dt, осуществляемом исполнительным элементом СЭУ. В модели СЭУ ИЭ представлен интегратором integrator 1. В соответствии с полученным выше выражением (9) текущее значение мощности определяется выражением:

где


Рис. 3. Цифровая модель системы регулирования частоты вращения АД, управляемого токами статора, с системой экстремального управления, поддерживающей минимум мощности, потребляемой двигателем
Для вычисления 1/v в модели СЭУ использована решающая схема с отрицательной обратной связью, состоящая из интегратора integrator 2, блока умножения product 1 и усилителя с коэффициентом усиления 104. Дискретные значения Р с интервалом Т определяет фиксатор нулевого порядка Zero-Oder Hold 1. Разность текущего и предыдущего значения Р ΔР и увеличение ее в 10 раз осуществляет дискретная передаточная функция Discrete Transfer Fcn 2. Реверс ИЭ при ΔР > 0 выполняет логическая схема, состоящая из реле Relay 1, фиксатора нулевого порядка Zero-Oder Hold 2, блока умножения product 2 и инерционного элемента Transfer Fcn 2, необходимого для работы замкнутого контура, образованного безынерционными элементами. Фиксатор нулевого порядка запоминает выходной сигнал реле (+1 или –1) с противоположным знаком. При ΔР > 0 короткий положительный импульс, поступающий на вход 2 блока умножения product 2, изменяет состояние реле на противоположное. Блок умножения product 3 совместно с генераторами единичного скачка step1 и step2 позволяют включать и отключать управление импульсным элементом ИЭ в заданное время. Короткий импульс в момент времени, когда ΔР принимает положительное значение, получается в модели СЭУ с помощью 2 блоков насыщения saturation 1 и 2 с ограничением отрицательного сигнала на нулевом уровне, усилителя с коэффициентом усиления 400 и дифференцирующей цепочки, представленной звеном Transfer Fcn. Подключение СЭУ осуществляется установкой переключателя Manual Switch в положение 2.
Процессы в системе при поддержании минимума потребляемой мощности
Система регулирования частоты вращения АД, дополненная СЭУ, поддерживающей минимум мощности, потребляемой двигателем в стационарном режиме, в общем случае весьма сложна для анализа аналитическими методами. Однако анализ СЭУ довольно просто выполнить, полагая практически безынерционным ее объект управления, то есть систему регулирования частоты вращения АД. Это означает, что при изменении параметра v потребляемая АД мощность изменяется согласно статической характеристике P(ν), снятой в установившемся режиме. Допущение выполняется, очевидно, тем более точно, чем быстрее протекают переходные процессы в системе регулирования частоты вращения АД и чем медленнее изменяется v. Во многих реальных случаях такое условие можно выполнить с необходимой точностью.
На рис. 4 представлена цифровая модель СЭУ со статическим ОУ, полученным заменой цифровой модели системы регулирования частоты вращения блоком постоянной величины, равной Ω.

Рис. 4. Цифровая модель СЭУ со статическим ОУ
На модели (рис. 4) проведено имитирование переходного процесса при небольшом начальном отклонении от оптимального значения v. При подходе к оптимальному значению v в СЭУ устанавливаются автоколебания с периодом, равным 4T, где T = 20 с — интервал дискретности, (|dν/dt| = 0,00125 рад/с/с), представленные на рис. 5. В частном случае, если момент первого достижения минимального значения Р совпадает с моментом дискретизации, период автоколебаний Р оказывается вдвое меньше, как показано на рис. 6.

Рис. 5. Процессы в идеализированной СЭУ в общем случае
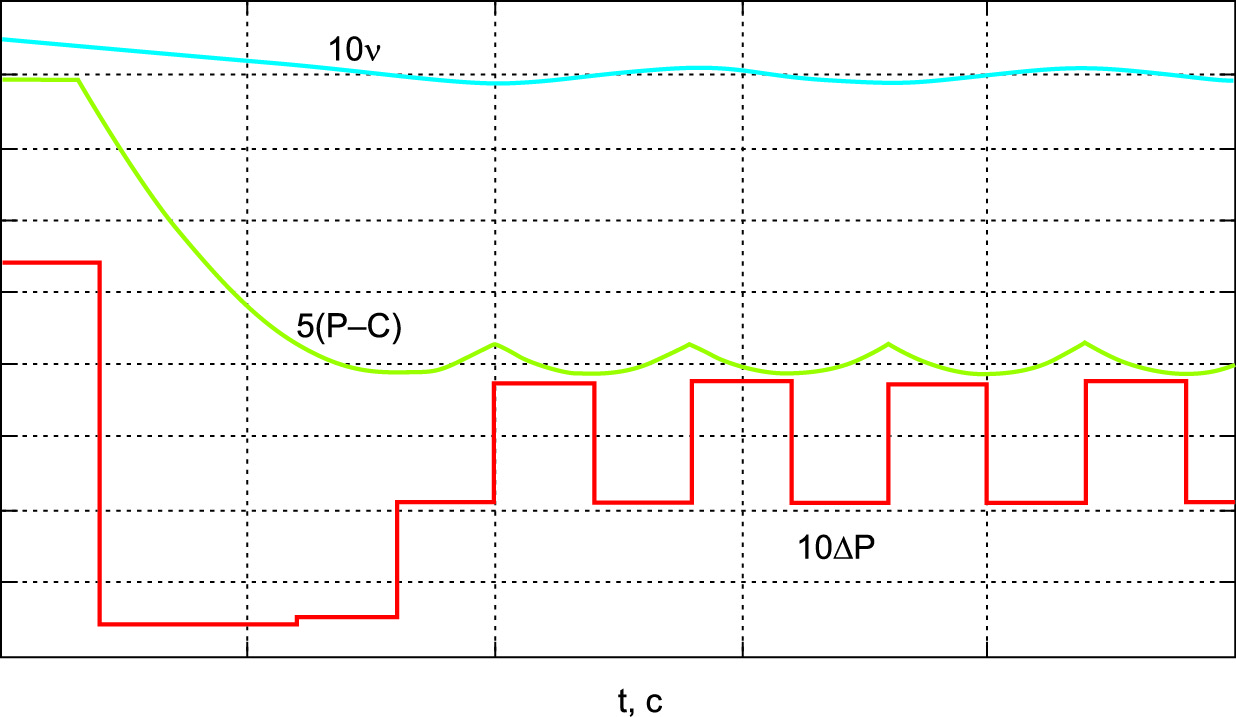
Рис. 6. Процессы в идеализированной СЭУ в частном случае
Очевидно, что максимальное отклонение P от минимального значения в установившемся режиме может иметь значение от (Tdν/dt)2 до 4K(Tdν/dt)2, если вблизи экстремума P – Pmin = K(ν – νOPT1)2 с хорошей точностью.
В реальных условиях даже медленное изменение v и периодическая смена направления сопровождается отклонением процесса в системе регулирования частоты вращения АД от стационарного, соответствующего постоянному значению v. Следовательно, процесс в действительности отличается от идеализированного процесса, представленного на рис. 5 и 6. Моделирование по модели, представленной на рис. 3, позволяет учесть взаимное влияние СЭУ и системы регулирования частоты вращения АД.
Основное отличие проявляется в моменты реверса v и периодическом изменении Pmin (кривая 5(Р–С) на рис. 7 и 8). Вызвано это малым периодическим отклонением частоты вращения АД Ω от постоянного значения. Уменьшение скорости изменения v позволяет практически исключить влияние изменения v на Ω.

Рис. 7. Влияние реальных свойств ОУ на процессы в СЭУ в общем случае

Рис. 8. Влияние реальных свойств ОУ на процессы в СЭУ в частном случае
Выводы
- Определено абсолютное скольжение, оптимальное по мощности, потребляемой асинхронным двигателем в системе частотно-токового управления частотой его вращения в стационарном режиме при постоянном моменте нагрузки. Оно зависит только от параметров двигателя.
- При экспериментальном подтверждении пропорциональности скольжения, оптимального по потребляемой мощности, и скольжения, оптимального по вращающему моменту, можно в переходном режиме, легко заменив первое (ν = νОРТ1) на второе
(ν = νОРТ), получить наибольшее быстродействие системы регулирования скорости АД. - Поисковая система экстремального управления позволяет не только определять в системе частотно-токового управления частотой вращения асинхронного двигателя абсолютное скольжение, оптимальное по потребляемой им мощности, но и поддерживать минимальную потребляемую мощность при изменении параметров двигателя.
- Коршунов А. И. Алгоритм частотно-токового управления асинхронным двигателем в замкнутом электроприводе // Силовая электроника. 2019. № 3.
- Коршунов А.И. Математическая модель асинхронного трехфазного двигателя с фазным ротором, не использующая понятие вращающегося магнитного поля // Силовая электроника. 2019. № 6.
- Техническая кибернетика. Теория автоматического регулирования. Книга 3. Теория нестационарных, нелинейных и самонастраивающихся систем. Часть II. Под. ред. Солодовникова В. В. М.: Машиностроение, 1969.
 12 ноября, 2007
12 ноября, 2007 4 февраля, 2021
4 февраля, 2021