

Частотно-управляемый электропривод перемещения самоходного грузового вагона
Самоходные грузовые вагоны
При проведении горнопроходческих работ в качестве шахтного транспорта широко применяются самоходные грузовые вагоны. Они обеспечивают доставку руды от бункера перегружателя проходческо-добычного комбайна до конвейера поточно-транспортной системы шахты.
Промышленностью выпускаются модификации вагонов грузоподъемностью 2–30 т с постоянной и регулируемой высотой разгрузки. Они представляют собой кузов на четырех-, шести- или восьмиколесном шасси с пневматическими шинами. В кузове расположен донный скребковый конвейер, используемый для распределения груза в кузове при загрузке его погрузочными машинами и разгрузке на конечных пунктах. Управление всеми механизмами производится машинистом из кабины. Питание вагона осуществляется по электрическому кабелю, который наматывается на кабельный барабан с кабелеукладчиком. Дополнительно вагоны оснащаются гидравлической системой, обеспечивающей работу тормозов, усилителя рулевого управления, механизма подъема и опускания кузова [1, 2].
Самоходный вагон совершает челночные рейсы, двигаясь без разворотов в одну сторону с полной загрузкой, а в обратную — порожним. Расстояние транспортирования определяется длиной кабеля и не превышает 400 м. Предельно допустимая скорость по условиям безопасности не должна превышать 9 км/ч. Минимальная скорость движения определяется удобством маневрирования в узких выработках. Поэтому нижнее значение скорости находится на уровне 2 км/ч. С целью обеспечения комфортности при работе машиниста вагон должен разгоняться и останавливаться плавно. Для прохождения спусков и подъемов требуется как минимум одна промежуточная скорость движения. Значение этой скорости во многих случаях составляет 6 км/ч.
Особенностью горной выработки является то, что ее профиль неровный как в горизонтальной, так и в вертикальной плоскости. Угол наклона по вертикали (ϕ) может достигать 15° как вверх, так и вниз от горизонта. В горизонтальной плоскости изменение профиля носит еще более значительный характер: углы поворотов достигают 90°. С учетом этих особенностей построены возможные диаграммы движения самоходного грузового вагона (рис. 1). Диаграммы не учитывают переходные процессы пуска и торможения, так как эти режимы не оказывают существенного влияния на работу электропривода.

Рис. 1. Тахограмма и нагрузочная диаграмма движения вагона
На основе описанных выше особенностей конструкции и режимов работы самоходного грузового вагона можно сформулировать следующие требования к электроприводу перемещения:
- необходимость плавного регулирования скорости в диапазонах:
- при движении 5:1;
- с учетом процессов разгона и торможения 50:1;
- реверсивный характер работы привода;
- значительные и затяжные перегрузки при работе;
- рекуперация энергии в питающую сеть при движении вагона вниз под уклон;
- ограниченный объем для размещения электрооборудования;
- необходимость учета требований, предъявляемых к рудничному электрооборудованию.
Электроприводы грузовых самоходных вагонов
На самоходных грузовых вагонах преимущественно используется электрический привод из-за его высокой надежности, хороших регулировочных свойств и удобства обслуживания. Применяются электроприводы как постоянного, так и переменного тока. Однако из-за большей стоимости и массогабаритных показателей, а также необходимости дополнительного обслуживания электропривод постоянного тока получил меньшее применение, чем электропривод переменного тока.
Управление электроприводом переменного тока осуществляется от релейно-контакторной схемы на основе многоскоростных двигателей или от статических полупроводниковых преобразователей частоты. Релейно-контакторные системы просты в реализации, но не обеспечивают требуемого качества управления электроприводом. Поэтому в перспективе частотно-управляемый электропривод вытеснит электропривод с релейно-контакторной системой управления.
На рис. 2 изображена возможная схема электропривода самоходного грузового вагона. Питание на вагон подается от сети переменного тока через питающий кабель и токосъемник. Управление движением ходовых колес и конвейера осуществляется при помощи частотно-управляемого асинхронного электропривода. Привод насоса маслостанции нерегулируемый. Его включением и отключением управляет контактор. Режим работы приводов задается машинистом с пульта управления и педального переключателя. Обработка сигналов управления машиниста и координация работы электроприводов осуществляется контроллером. Для настройки параметров электроприводов и преобразователей частоты служат диагностический дисплей и пульт настройки. Обмен информацией между ними происходит по радиоканалу.
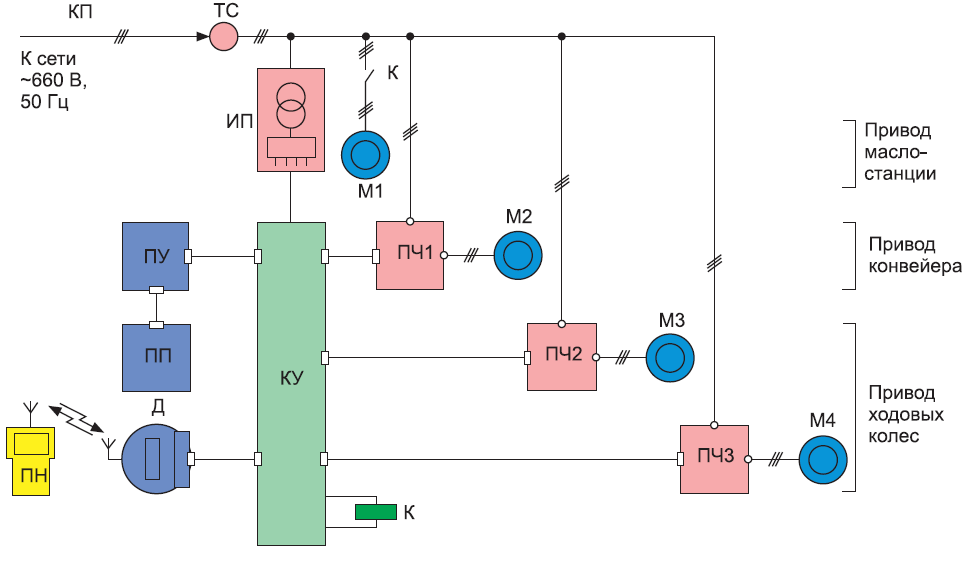
Рис. 2. Структурная схема электропривода самоходного вагона:
КП — кабель питающий;
ТС — токосъемник;
ИП — источник питания собственных нужд;
М1–М3 — электродвигатели основных механизмов;
ПЧ1–ПЧ3 — преобразователи частоты;
КУ — контроллер управления;
К — контактор;
ПУ — пульт управления машиниста;
ПП — педальный переключатель;
Д — дисплей;
ПН — пульт для настройки параметров электропривода
Преобразователи частоты
В настоящее время наиболее распространенной технологией преобразования переменного тока являются системы с двойным преобразованием энергии, содержащие в своей структуре звено постоянного тока. Промышленностью освоен массовый выпуск преобразователей частоты, имеющих на входе неуправляемый выпрямитель, а на выходе автономный инвертор напряжения. Для рассеивания энергии торможения в цепь постоянного тока дополнительно устанавливается тормозной резистор и транзисторный ключ (чоппер). Известен пример установки такого преобразователя на самоходный грузовой вагон [3]. Однако, несмотря на высокую надежность и простоту данной схемы, она требует установки тормозного резистора высокой мощности с большим объемом охлаждаемой поверхности. Использование значительного места под тормозной резистор ограничивает ее применение на самоходных вагонах.
Большей перспективностью обладают преобразователи частоты, имеющие на входе выпрямительно-инверторный блок. В этом случае энергия торможения возвращается обратно в питающую сеть, что позволяет снизить массогабаритные показатели и повысить энергетическую эффективность электропривода [4].
Описание ПЧ-ТТЕТ-32-690-50-УХЛ4
Предприятием «Автоматизированные системы и комплексы» разработан преобразователь частоты типа ПЧ-ТТЕТ-32-690-50-УХЛ4, отвечающий требованиям, предъявляемым к электроприводу самоходного вагона [5]. Он предназначен для управления асинхронными электродвигателями мощностью до 30 кВт. Основные технические характеристики приведены в таблице.
| Наименование параметра | Технические данные |
| Номинальный выходной ток, А | 32 |
| Номинальное выходное напряжение, В | 690 |
| Номинальное значение выходной частоты, Гц | 50 |
| Диапазон изменения выходной частоты, Гц | 0–120 |
| Кратность допустимой перегрузки по току в течение 60 секунд, при повторяемости не более одной в 15 минут | 2 |
| Номинальное значение напряжение питания, В | 660 |
| Допустимое установившееся отклонение напряжения питания, %, не более | плюс 15, минус 20 |
| Рабочее напряжение дискретных входов и выходов, В | = 24 |
| Вид охлаждения | воздушное естественное |
| Степень защиты по ГОСТ 14254-96 | IP00 |
| Масса, кг (не более) | 65 |
| Габаритные размеры (В×Ш×Г), мм (не более) | 470×270×590 |
На рис. 3 показана структурная схема преобразователя. Он состоит из силовой части и системы управления. Силовая часть получает питание от трехфазной сети переменного тока с напряжением 660 В и частотой 50 Гц. Во входной цепи расположены датчики напряжения и тока, сетевой реактор и выпрямительно-инверторный блок. В звене постоянного тока установлены датчик напряжения, конденсаторный фильтр, тормозной резистор и чоппер. Выходная цепь силовой части преобразователя подключена к асинхронному двигателю и содержит автономный инвертор напряжения и датчики тока.

Рис. 3. Структурная схема преобразователя частоты:
СЧ — силовая часть;
ДН1–ДН4 — датчики напряжения;
ДТ1–ДТ6 — датчики тока;
РС — реактор сетевой;
ВИ — выпрямитель-инвертор;
Ф — фильтр;
РТ — резистор тормозной;
Ч — чоппер;
АИ — автономный инвертор;
АД — асинхронный двигатель;
СУ — система управления;
Uвх, Iвх, Ud, Iвых — сигналы измерения входного напряжения и тока, напряжения в звене постоянного тока и выходного тока, соответственно;
УПР1–УПР3 — сигналы управления транзисторами ВИ, Ч и АИ, соответственно;
ДИ — дискретный интерфейс;
КП1, КП2 — коммуникационные порты
Измерение напряжений и токов используется для реализации защит и управления работой транзисторов обоих инверторов и чоппера. Сетевой реактор снижает уровень высших гармоник напряжения, генерируемых в сеть. Выпрямительно-инверторный блок преобразует переменный ток в постоянный и обратно. Выпрямленное напряжение сглаживается конденсаторным фильтром. Помимо этого через конденсатор протекает реактивный ток асинхронного двигателя. Автономный инвертор формирует на выходе преобразователя трехфазное переменное напряжение с регулируемой частотой и действующим значением. Для обеспечения формы выходного напряжения, близкой к синусоидальной, применяется синусоидальная широтно-импульсная модуляция. Тормозной резистор с чоппером включаются в работу только при потере питания от сети и обеспечивают остановку самоходного вагона в аварийных ситуациях, например при обрыве питающего кабеля.
Система управления преобразователя состоит из трех плат: микроконтроллера, сопряжения и источника питания. Структурная схема изображена на рис. 4.

Рис. 4. Структурная схема системы управления
Плата источника питания запитана от разделительного трансформатора источника питания. Она обеспечивает все элементы системы управления стабилизированными напряжениями питания. Через плату сопряжения к микроконтроллеру подключены периферийные устройства: дискретный интерфейс, драйверы силовых транзисторов и датчики. От пульта управления через дискретный интерфейс поступают сигналы о выборе одной из трех предустановленных скоростей V1–V3, направления движения ВП — вперед, НЗ — назад. Здесь же формируется выходной сигнал И для индикации состояния преобразователя.
Алгоритмы управления содержатся в управляющей программе, которая хранится в памяти платы микроконтроллера. Программой обеспечиваются следующие функции:
- индивидуальное управление каждым электроприводом мотор–колеса;
- плавное регулирование скорости движения;
- набор предустановленных скоростей;
- плавный разгон и остановка вагона;
- изменение направления движения;
- антипробуксовочный режим;
- рекуперация энергии торможения при движении вагона вниз под уклон в питающую сеть;
- комплекс защит преобразователя и двигателя;
- обмен информацией с внешними устройствами по последовательному коммуникационному интерфейсу.
При проектировании преобразователя учитывались требования ГОСТов [6, 7].
Разработанный преобразователь частоты предназначен для размещения во взрывозащищенных корпусах со степенью защиты не ниже IP54.
Заключение
Самоходные грузовые вагоны являются одним из элементов горнопроходческого комплекса, существенно влияющим как на его производительность, так и на энергетическую эффективность.
Для движения вагона и управления движением рациональной представляется система ПЧ–АД с индивидуальным приводом каждого колеса как имеющая более простую и надежную кинематическую трансмиссию, простоту обслуживания при сохранении высокой управляемости. Сокращение затрат электроэнергии при транспортировке руды достигается за счет рекуперации энергии торможения обратно в сеть при движении вагона вниз под уклон.
Предприятием «Автоматизированные системы и комплексы» осуществлена разработка преобразователя частоты типа ПЧ-ТТЕТ-32-690-50-УХЛ4, отвечающего требованиям к электрооборудованию, размещаемому во взрывоопасных зонах. Преобразователь прошел опытно-промышленные испытания на самоходном вагоне типа В17К производства ОАО «Копейский машиностроительный завод».
В настоящее время продолжается работа по совершенствованию преобразователя частоты и алгоритмов управления электроприводом перемещения самоходного вагона.
- Бреннер В. А. и др. Шахтные самоходные вагоны. М: Недра.1972.
- Мальчер М. А., Гюбнер Г. Э. Самоходный грузовой транспорт на пневмоходу // Горное оборудование и электромеханика. 2009. № 8.
- Аникин А. С. Опыт внедрения частотно-регулируемого электропривода на базе преобразователя частоты VACON на самоходный вагон В15К // Известия ТулГУ. Технические науки. Вып. 3. 2010. Ч. 2.
- Бородацкий Е. Г. Повышение энергетической эффективности электропривода передвижения самоходного вагона // Сб. докл. 1 научно-практического семинара с межд. участием «Эффективное и качественное снабжение и использование электроэнергии». Екатеринбург: ЗАО «Уральские выставки». 2011.
- Бородацкий Е. Г., Васильев П. А. Преобразователь частоты для самоходного ва-гона горнопроходческого комплекса // Материалы XI межд. научно-практической конференции «Проблемы карьерного транс-порта». Екатеринбург: УрО РАН. 2011.
- ГОСТ 2460788. «Преобразователи частоты полупроводниковые. Общие технические требования».
- ГОСТ Р 51330.2099. «Электрооборудование рудничное. Изоляция, пути утечки и электрические зазоры».
 11 декабря, 2007
11 декабря, 2007 13 августа, 2024
13 августа, 2024