
Драйвер IGBT: «ядро» или plug-and-play?
Базовые принципы и основные схемы
Коммерческие драйверы IGBT/MOSFET подразделяются на три класса:
- Интегральное устройство управления затвором (Driver IС): этот термин охватывает широкий класс микросхем — от простейших схем сдвига уровня (например, c логическим входом 3,3 В и биполярным выходом) до сложных твердотельных систем, совмещающих на одном кристалле логику управления и изолирующий барьер. В первом случае применение IC требует разработки схемы изоляции и источника питания. Устройства второго типа являются функционально законченными, но из-за физических ограничений они могут работать только в маломощных приложениях.
- «Ядро» (Driver Core): в системах средней и высокой мощности «ядро» драйвера (рис. 1, слева) может обеспечить все необходимые функции управления, но при этом оно, естественно, превышает вариант IC по габаритам. Изоляция реализуется с помощью оптронов или импульсных трансформаторов, которые обеспечивают требуемые рабочие напряжения и изоляционные зазоры. «Ядро», как правило, представляет собой компактную печатную плату, которая подключается к плате адаптера, устанавливаемой непосредственно на силовой модуль. Такая конструкция позволяет адаптировать сопротивления затвора и пороги срабатывания защиты для конкретного применения.
- Драйвер plug-and-play: для модулей в стандартных промышленных корпусах (например, SEMITRANS 10, SEMiX 3p) выпускаются готовые платы (рис. 1, справа), обеспечивающие все функции управления и защиты и содержащие резисторы затвора и другие необходимые элементы. Такие драйверы устанавливаются на силовой ключ методом пайки или прессовой посадки, также возможно проводное подключение.

Рис. 1. «Ядро» SKYPER 12 PV Core и готовый plug-and-play-драйвер SKYPER 12 для управления модулями SEMiX 3p
Топология двухканального драйвера
На рис. 2 показана блок-схема современного двухканального (полумостового) драйвера, важнейшей особенностью которого является четкое разделение первичного (низковольтного) и вторичного (высоковольтного) каскадов. Сигналы с контроллера подаются на первичный каскад, чья логическая схема (она может быть реализована в виде ASIC) обеспечивает подавление шумовых импульсов, формирование «мертвого времени» для исключения сквозного тока и соответствующую обработку импульсов управления для их передачи через изолирующий барьер.

Рис. 2. Блок-схема 2-канального драйвера SEMIKRON
Для работы драйвера также нужен изолированный источник, формирующий положительное и отрицательное напряжение, необходимое для включения и выключения силовых ключей. Вторичный каскад тоже должен обеспечивать функцию быстрой защиты (например, DSCP), позволяющую оперативно блокировать силовой модуль в случае перегрузки и формировать сигнал ошибки, передаваемый на вход устройства.
Рабочее напряжение
Большинство «ядер» и устройств plug-and-play классифицируется в соответствии с максимальным блокирующим напряжением силовых модулей, для управления которыми они предназначены (например, 1200 В, 1700 В). Этот параметр, в свою очередь, определяет тестовое напряжение изоляции драйвера (Visol), в основном характеризующееся свойствами изолирующего барьера между первичным и вторичным каскадами. Наиболее надежными в этом отношении являются импульсные трансформаторы, используемые в большинстве драйверов SEMIKRON и обеспечивающие величину Visol = 4 кВ (АС_rms). Соответствующие стандарты и методы проверки изоляции приведены в [7].
Выходные характеристики драйверов
Несмотря на то что существует множество различных концепций управления изолированным затвором [2], в выходных каскадах современных драйверов, как правило, используется однополярный или двуполярный источник напряжения с изменяемым сопротивлением RG. В этом случае к затвору прикладываются сигналы включения и выключения с фиксированным уровнем (VG_on, VG_off), а скорость нарастания тока регулируется выбором RGon/RGoff (рис. 3, 4). В модулях средней и высокой мощности используются отдельные резисторы включения и выключения — такая концепция использована в большинстве последующих схем и пояснений.

Рис. 3. Включение IGBT от биполярного источника напряжения

Рис. 4. Выключение IGBT от биполярного источника напряжения
Обычно уровни напряжений VG_on и VG_off одинаковы для определенных технологий полупроводниковых приборов, их выбор предусматривает компромисс между следующими параметрами:
- стоимость/сложность схемы (биполярный или однополярный источник напряжения);
- скорость переключения;
- иммунитет к ложным срабатываниям [3];
- потери проводимости (уменьшение VCE(on), RDS(on));
- предельное напряжение оксидного слоя затвора (ограничение максимального значения VG).
Для включения/выключения мощных кремниевых IGBT обычно используются следующие уровни: VGE_on +15 В, VGE_off от –5 до –15 В. Маломощные транзисторы, как правило, блокируются нулевым сигналом. Недавно появившиеся на рынке IGBT 7-го поколения [6] можно безопасно отключать при VGE_off = 0 В благодаря высокому соотношению входной емкости CGE и емкости Миллера CGC.
Кремниевые MOSFET управляются сигналами 10–15 В (VGE_on) и 0 В (VGE_off). В отношении карбидокремниевых SiC MOSFET до сих пор не выработаны четкие рекомендации, однако для их включения следует использовать повышенные уровни напряжения (15–20 В) для снижения потерь проводимости. Рекомендуемое значение VGE_off составляет от –3 до –5 В.
Значения VGE_on, VGE_off необходимы в первую очередь для расчета мощности потерь управления с учетом рабочей частоты и заряда затвора QG.
Характеристики затвора
Транзисторы с изолированным затвором (IGBT, MOSFET) имеют три основные собственные паразитные емкости (CGE, CCE, CGC). Их комбинации формируют общие «малосигнальные» параметры Cies, Cres, Coes (рис. 5), изменяющиеся в зависимости от напряжения на транзисторе.

Рис. 5. Паразитные и малосигнальные емкости затвора
Для нормирования характеристик драйвера наибольшее значение имеет емкость затвор-эмиттер CGE и затвор-коллектор CGC (емкость Миллера), поскольку они в первую очередь определяют требования к току и напряжению управления. На рис. 6 показаны идеализированные формы сигналов на затворе, а также процесс заряда емкостей затвора.

Рис. 6. Идеализированные эпюры сигналов включения
Наибольший интерес представляют следующие интервалы времени:
- t0–t1: ток IG заряжает входную емкость CGE, напряжение затвор-эмиттер VGE повышается до порогового значения VGE(th). Ток управления, определяемый величиной RG, может достигать нескольких ампер. Поскольку сигнал управления VGE все еще ниже VGE(th), ток коллектора отсутствует, VCE остается на уровне напряжения питания VCC;
- t1–t2: VGE достигает порога VGE(th), начинается процесс включения транзистора. Ток IC нарастает, но, поскольку оппозитный диод в начале этого интервала все еще находится в состоянии проводимости, напряжение коллектор-эмиттер VCE остается на прежнем уровне. Обратное восстановление оппозитного диода (IRR) приводит к скачку тока коллектора. Пока полупроводниковый прибор находится в активном режиме, напряжение затвора напрямую связано с IC, поэтому всплеск тока отражается в осциллограммах затвора;
- t2–t3: когда оппозитный диод полностью закрывается, VCE начинает быстро уменьшаться, на коллекторе формируется крутой фронт напряжения dVCE/dt. Сигнал управления VGE поддерживается на уровне VGE(pl), пока идет заряд емкости CGC, так формируется плато Миллера;
- t3–t4: скорость спада VCE уменьшается (вместе с ростом CGC и стабилизацией тока затвора), напряжение на коллекторе приближается к уровню насыщения (VCEsat), CGC продолжает заряжаться. Сигнал управления VGE остается на уровне VGE(pl);
- t4–t5: в начале этого интервала транзистор уже полностью открыт. После заряда CGC происходит полный заряд емкости CGE, в результате чего VGE достигает установившегося значения VGE(on). Напряжение на коллекторе VCE соответствует состоянию насыщения VCEsat.
При выключении затвора разряд емкостей идет в обратном порядке. Идеализированные формы сигналов выключения (соответствующие типовым значениям сопротивлений затвора) приведены на рис. 7.

Рис. 7. Идеализированные эпюры сигналов выключения
Паразитные элементы IGBT (рис. 5) оказывают влияние на его динамические свойства, однако для выбора драйвера используется гораздо более информативный параметр — характеристика заряда затвора. Она приводится в спецификации силового модуля в виде графика, показывающего изменение напряжения VG по мере накопления заряда (рис. 8, слева). Эффективный заряд затвора QG определяется в диапазоне от напряжения выключения VGE(off) до напряжения включения VGE(on). Эти значения могут варьироваться для различных драйверов, что следует учитывать при расчете величины QG.

Рис. 8. Слева: пример характеристики затвора в спецификации модуля SKM400GB12E4;
справа: метод линейной экстраполяции
В некоторых случаях диапазон графика QG может оказаться недостаточным с учетом реальных значений напряжения управления, тогда характеристику заряда затвора следует экстраполировать, как показано в правой части рис. 8.
Qout и дополнительная емкость
Нагрузочные характеристики драйвера должны обеспечивать перезаряд затвора на каждом цикле коммутации без заметного изменения напряжения на выходе (например, +15 В, –8 В). При переключении транзистора спад сигнала управления может привести к увеличению динамических потерь. По этой причине в спецификациях драйверов указывается значение максимального заряда за один импульс (Qout), которое должно быть больше, чем заряд затвора QG IGBT (рис. 8). Величина Qout часто приводится с оговоркой, что пользователь должен добавить некоторую дополнительную емкость Сboost в цепь питания выходного каскада. Метод расчета Сboost приводится в соответствующих руководствах по применению драйверов. Настоятельно рекомендуется использование керамических конденсаторов, электролитические или танталовые считаются неподходящими для этой цели. Кроме того, иногда требуется дублирование дополнительной емкости и по первичному питанию.
Средний ток затвора IG(avg)
При известной величине QG MOSFET/IGBT требуемый средний ток IG(avg) при частоте коммутации fsw рассчитывается следующим образом:
![]()
В спецификациях многоканальных драйверов указывается значение Iout(avg) на один канал. Соответственно, расчетное значение максимального среднего тока затвора должно быть меньше Iout(avg) с учетом его температурной зависимости.
Аналогично вычисляется средняя мощность драйвера с учетом перепада напряжения управления:

Пиковый ток затвора IG(pk)
Пиковый выходной ток драйвера IG(pk), возникающий при включении или выключении, рассчитывается исходя из амплитуды управляющего напряжения и общего сопротивления в цепи затвора. На самом деле распределенная индуктивность, имеющаяся в этой цепи, ограничивает максимальную величину IG(pk), но, как правило, она неизвестна на начальных этапах проектирования, поэтому абсолютный пиковый ток в наихудшем случае можно оценить как:

где RG — внешний резистор затвора; RE — встроенный или внешний резистор эмиттера (если есть); RGint — встроенный резистор затвора (как правило, в мультичиповых модулях).
Расчетное значение IG(pk) должно быть меньше пикового выходного тока Iout(peak), приводимого в спецификациях драйверов, что следует учитывать при выборе номинала RG (3).
Резистор затвора
Как показано выше, резистор затвора управляет процессами заряда и разряда паразитных емкостей, соответственно, его величина влияет на ряд важных параметров полупроводникового модуля:
- скорость коммутации;
- динамические потери;
- область безопасной работы в заблокированном режиме (RBSOA);
- область безопасной работы в режиме короткого замыкания (SCSOA);
- характеристики EMI;
- скорость изменения напряжения коллектор-эмиттер (сток-исток), dv/dt;
- скорость коммутации тока коллектора (стока), di/dt;
- характеристики обратного восстановления оппозитного диода.
Поведение силового модуля может варьироваться в зависимости от технологии его изготовления (поколение IGBT/MOSFET), однако, как правило, повышение сопротивления затвора ведет к снижению скорости переключения и увеличению динамических потерь. Выбор RG — это компромисс между максимально допустимой скоростью коммутации, уровнем электромагнитных помех и потерями мощности.
Минимальное значение RG
В процессе квалификации силовых полупроводниковых приборов их производители проводят ряд динамических тестов, позволяющих определить значения RG_on и RG_off, обеспечивающие минимальный уровень динамических потерь и стабильное поведение в пределах области безопасной работы (SOA). Это делается по методике, изложенной в соответствующих стандартах, с применением специализированного оборудования и тестового инвертора с низкоиндуктивным звеном постоянного тока. Минимальные рекомендуемые номиналы резисторов затвора (и соответствующие значения скоростей переключения и потерь) приводятся в разделе Characteristics спецификации модуля (рис. 9). Эти величины можно взять за отправную точку, однако оптимальные номиналы RGon/RGoff для конкретного применения определяются только в ходе так называемого двухимпульсного теста [4].
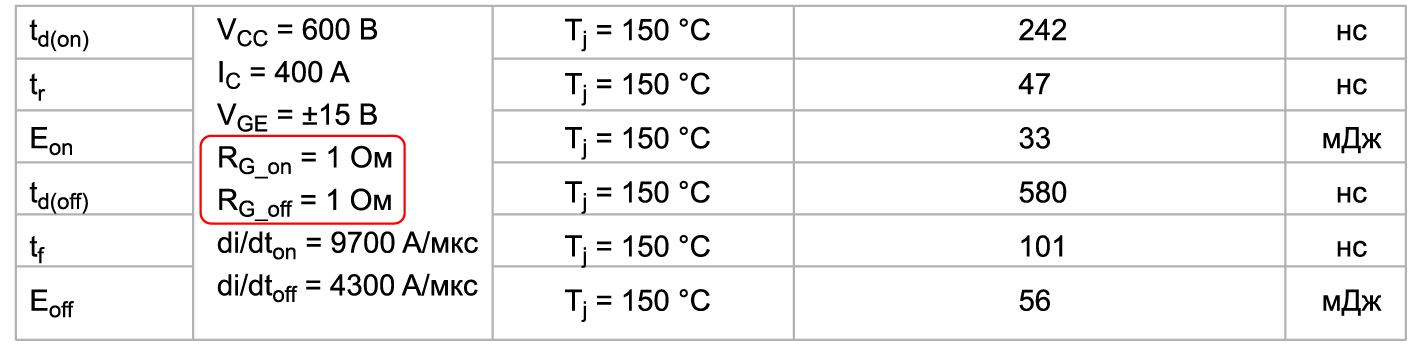
Рис. 9. Минимальные значения RG_on/RG_off в технической спецификации (datasheet) модуля SKM400GB12E4
Максимальное сопротивление затвора в документации не определяется, однако в качестве «разумного» диапазона RG можно использовать номиналы, указанные на графиках зависимости динамических параметров (например, Esw = f(RG), tr/tf = f(RG)). Важно, чтобы выбранный резистор обеспечивал IGBT/MOSFET устойчивое насыщение на каждом цикле коммутации и исключал работу транзистора в линейной зоне.
Встроенный резистор затвора RGint
Силовые модули, содержащие несколько параллельных чипов, имеют внутреннее сопротивление затвора RGint на каждом из них. В некоторых случаях резистор RGint интегрируется в кристалл IGBT/MOSFET при его производстве. Эти элементы необходимы для равномерного распределения токов в параллельных чипах и не могут быть удалены или изменены пользователем. Приводимые в спецификациях значения динамических потерь, скоростей переключения и т. д. учитывают наличие RGint. Поэтому номиналы RG, указанные в технической документации, относятся к внешним, устанавливаемым пользователем резисторам затвора. Величина RGint нужна для расчета пикового тока затвора (Ipk) при коммутации.
Резистор плавного выключения RGsoft _off
Многие современные драйверы IGBT/MOSFET обеспечивают динамическую защиту от короткого замыкания (DSCP) [10]. Функция DSCP основана на мониторинге напряжения коллектор-эмиттер VCE_sat силового модуля, при выходе которого из насыщения (DESAT — Desaturation) он мгновенно блокируется. Однако отключение тока КЗ при «номинальном» резисторе затвора RGoff может привести к перенапряжению на транзисторе из-за очень высокой скорости спада тока di/dt. Поэтому во многих схемах DSCP используется дополнительное сопротивление RGsoft_off, которое соединяется последовательно с «обычным» RGoff при обнаружении перегрузки (рис. 10). Увеличение сопротивления затвора замедляет процесс выключения, тем самым снижая значение di/dt и, соответственно, уровень коммутационного перенапряжения.

Рис. 10. Плавное выключение IGBT через дополнительный резистор RGsoft-off
Как правило, по умолчанию используется номинал RGsoft_off, в 10 раз превышающий RGoff. Оптимальную величину этого резистора выбирают при испытаниях преобразователя в соответствии с заданными режимами перегрузки. Настройка предусматривает поиск компромисса между максимально допустимым временем короткого замыкания прибора tpsc и коммутационным перенапряжением, которое не должно превышать VCES (IGBT) или VDSS (MOSFET).
Мощность резистора затвора
Во время каждого рабочего цикла через резистор затвора проходит пиковый ток Ipk, данный процесс повторяется на частоте коммутации, обычно находящейся в диапазоне единиц и десятков кГц. Это приводит к рассеянию достаточно высокой энергии в небольшом резисторе, как правило имеющем smd-корпус. На рис. 11 показана форма тока затвора при включении (положительный импульс) и выключении (отрицательный импульс), протекающего через RGon и RGoff.

Рис. 11. Ток затвора при включении и выключении
Предполагая форму импульсов IG, близкую к треугольной, можно рассчитать среднеквадратичное значение тока и, соответственно, среднюю рассеиваемую мощность в резисторе RG:

где IG(pk) — пиковое значение тока; fsw — частота коммутации; tp — длительность импульса тока (рис. 11), которую можно оценить как:

Поскольку ток Ipk может быть довольно высоким, важно учитывать допустимую пиковую мощность резистора:
![]()
В спецификациях резисторов обычно приводится график зависимости повторяющейся импульсной мощности от длительности импульса.
Типы резисторов
Высокая мощность, рассеиваемая в резисторах затвора, требует тщательного подхода к их выбору, особенно это касается элементов, предназначенных для поверхностного монтажа (smd). Относительно низкие значения сопротивления, высокая рабочая температура и большая импульсная нагрузочная способность присущи резисторам с металлической пленкой, в частности цилиндрическим MELF (Metal Electrode Leadless Face).
Отказ (обрыв) резистора затвора может привести к тому, что силовой ключ останется открытым при отсутствии управляющего напряжения, поэтому в большинстве схем управления затвором используется параллельное включение нескольких сопротивлений RGon или RGoff, что также позволяет решить проблему высокой мощности рассеяния. В этом случае выделяемое тепло лучше распространяется по печатной плате, а выход из строя одного элемента не означает потерю контроля затвора.
Динамические характеристики оппозитных диодов
Поведение антипараллельных диодов IGBT (FWD) во многом зависит от резистора затвора и ограничивает его минимальное значение. Это означает, что скорость включения транзистора может быть увеличена только до уровня, обеспечивающего безопасный процесс блокирования оппозитного диода. На рис. 12 показана типовая зависимость тока обратного восстановления IRRM от скорости включения IGBT (diF/dt), определяемой резистором RGon. Как видно на рисунке, значение IRRM растет пропорционально diF/dt, при этом также увеличиваются потери мощности FWD. Вот почему во многих случаях величину RGon следует выбирать больше минимального значения, указанного в спецификации.

Рис. 12. Ток обратного восстановления диода в зависимости от di/dt и RGon, процесс обратного восстановления антипараллельного диода модуля SKM400GB12E4
Резисторы затвора и динамические потери
Для большинства современных технологий IGBT/MOSFET увеличение RG ведет к снижению скорости коммутации и росту динамических потерь, однако для четкого определения этой зависимости следует использовать графики, приводимые в спецификации силового модуля (рис. 13). Наклон и форма кривых могут очень сильно различаться для различных типов и поколений полупроводниковых приборов.

Рис. 13. Влияние резисторов затвора RGon, RGoff на динамические потери модуля SKM400GB12E4
Приведенный пример также иллюстрирует различия во влиянии резисторов включения и выключения. Величина RGon определяет энергию включения Eon силового модуля и энергию восстановления Err соответствующего диода свободного хода. Значение RGoff влияет только на энергию выключения Eoff.
Конструкция драйвера
Физическая реализация узла управления затвором и способ его подключения во многом определяют надежность и характеристики преобразовательной системы. При использовании «ядра» пользователь несет ответственность за разработку платы адаптера и выбор элементов, предназначенных для адаптации драйвера к конкретному модулю и условиям его применения. В первую очередь это резисторы затвора и компоненты схемы защиты, а также механические детали для соединения «ядра», адаптерной платы и силового модуля.
Пример такой конструкции приведен на рис. 14, где IGBT SKiM 93 управляется от «ядра» SKYPER 42, подключенного через адаптер Board 93 GB SKYPER 42R. Как сказано выше, на плате адаптера находятся резисторы затвора, элементы схемы защиты и компоненты для электрического соединения и механической фиксации этих трех узлов. Особенностью показанной сборки является то, что адаптер соединяет затворы трех стоек трехфазного (6-pack) транспортного модуля SKiM 93, превращая его в полумост с номинальным током, в три раза превышающим справочное значение ICnom силового ключа [11].

Рис. 14. Модуль SKiM 93 с платой адаптера и «ядром» SKYPER 42
В маломощных системах управляющий контроллер может устанавливаться на ту же печатную плату, что и драйвер, однако для безопасности в любом случае рекомендуется гальваническое разделение сигналов управления и силового каскада.
Подключение драйвера к управляющему контроллеру
Соединение управляющего контроллера с драйвером затворов должно иметь высокий уровень помехозащищенности. Искажение контрольных импульсов может вызываться влиянием электромагнитных помех, генерируемых при высоких скоростях коммутации (di/dt и dv/dt) силовых ключей IGBT/MOSFET. Для решения этой задачи необходимо свести к минимуму паразитные связи между управляющими сигналами и источниками шумов. Ниже приведены практические рекомендации по соединению драйвера и контроллера (рис. 15):

Рис. 15. Соединение драйвера с управляющим контроллером
- Трассы на печатной плате должны быть как можно короче. Следует минимизировать площадь токовых петель (областей между сигнальной и сигнальной общей цепью).
- Длина кабеля, соединяющего контроллер и драйвер, не должна превышать 3 м, рекомендуется использовать витую пару.
- Контрольные сигналы нельзя объединять в одном жгуте с проводниками цепей питания. Сигнальное заземление и общий провод источника питания следует разделить, эти проводники должны соединяться в одной точке, чтобы избежать образования петель заземления.
- Сигнальные проводники следует размещать как можно дальше от выводов AC/DC-модулей и силовых шин, кабелей заземления, конденсаторов DC-шины и других источников шумов.
- Проводники контрольных сигналов не должны проходить параллельно силовым шинам, минимальное допустимое расстояние между ними — 30 см. Пересечение допускается только в перпендикулярном направлении.
- Рекомендуется размещать все кабели вблизи заземленных элементов конструкции (например, радиатор или шасси).
- В системах с высоким уровнем шумов рекомендуется использовать экранированные кабели и волоконно-оптические линии связи для повышения помехозащищенности.
- Рекомендуется установка небольших конденсаторов (1 нФ) между входами драйвера и общим проводом источника питания драйвера для подавления дифференциальных шумов. Следует учесть, что это может вызвать небольшую задержку прохождения импульсов управления (несколько нс).
Соединение драйвера с силовым модулем
Драйвер затвора желательно размещать как можно ближе к силовому модулю, чтобы минимизировать распределенную индуктивность цепи управления. Хорошим решением является установка платы управления непосредственно на IGBT-модуль, как показано на рис. 14. Если это невозможно, то вблизи силового модуля следует разместить хотя бы компоненты, показанные на рис. 16. Это можно сделать, например, с помощью небольшой печатной платы, соединяемой кабелем с драйвером. Некоторые полезные советы по подключению драйвера затвора к IGBT приведены далее.

Рис. 16. Соединение драйвера с IGBT:
а) элементы схемы управления затвором;
б) установка PCB на сигнальных выводах IGBT
Подключение сигнальных выводов
- Соединение между выходом драйвера и выводами затвор-эмиттер силового модуля должно быть как можно короче, желательно использование витой пары.
- Сигнальные выводы затворов ТОР и ВОТ IGBT, а также транзисторов других фаз не должны объединяться в одном жгуте.
- Провод вывода мониторинга VCE_sat (защита DESAT) не следует объединять в одном жгуте с сигнальными проводниками затвора и эмиттера.
- На паразитной индуктивности LE (рис. 16) наводится напряжение из-за высокой скорости коммутации тока di/dt. Если общий провод подключен к силовому выводу эмиттера, сигнал на LE будет снижать амплитуду импульса включения затвора. Кроме того, это напряжение добавляется к VG_off, что замедляет скорость коммутации. Используйте дополнительный сигнальный контакт эмиттера (подключение Кельвина), чтобы свести к минимуму влияние отрицательной обратной связи на сигнал управления затвором.
- Паразитная индуктивность в цепи затвор-эмиттер (комбинация компонентов LG на рис. 16) образует LC-контур с входной емкостью Cies. Наличие этого контура может привести к генерации пиков напряжения, превышающих допустимое напряжение VG. Для демпфирования паразитных осцилляций рекомендуется ограничение минимального сопротивления затвора на уровне:
Расположение компонентов
- Располагайте резисторы RG_on, RG_off близко друг к другу.
- При использовании внешнего конденсатора питания выходного каскада драйвера устанавливайте его как можно ближе к драйверу для минимизации паразитной индуктивности.
Дополнительные элементы
- Чтобы IGBT оставался заблокированным при отключении питания драйвера и обрыве цепи управления, рекомендуется установить резистор утечки (например, 10 кОм) между затвором и эмиттером. Резистор RGE должен располагаться рядом с силовым модулем вместе с другими элементами цепи управления (рис. 16а). Лучший вариант — печатная плата, монтируемая на сигнальные выводы IGBT (рис. 16б).
- Используйте диод-супрессор (TVS) параллельно RGE для защиты затвора IGBT от коммутационных перенапряжений, а также для ограничения тока короткого замыкания. Крутой фронт напряжения dv/dt в режиме КЗ вызывает протекание тока смещения через емкость Миллера Ccg, что приводит к увеличению напряжения VGE и дальнейшему росту тока перегрузки.
- При использовании мощных IGBT-модулей или их параллельного соединения рекомендуется установка емкости CGE (рис. 16) между затвором и эмиттером [5]. В случае короткого замыкания это позволяет уменьшить уровень паразитных осцилляций на затворе. Его величина должна составлять примерно 10–50% от собственного входного конденсатора CGE
- Устройства управления затворами SEMIKRON (например, драйверы серии SKYPER) осуществляют защиту от КЗ путем мониторинга напряжения насыщения VCE_sat (DESAT) открытого силового ключа. Для защиты входа DESAT от пробоя при выключении транзистора необходим высоковольтный диод DVCE (рис. 16) с рабочим напряжением, не меньшим, чем у IGBT. Его время обратного восстановления trr должно быть меньше времени нарастания напряжения на коллекторе (VCE). Этим требованиям с учетом необходимых изоляционных зазоров соответствуют, например, специализированные диоды серии BY203. Для работы с IGBT с рабочим напряжением 1700 В следует установить последовательный резистор RVCE. Падение напряжения на этих компонентах необходимо учитывать при выборе порогового значения защиты DESAT.
- Порог срабатывания (VCEStat) схемы мониторинга VCE задается резистором RCFG (рис. 16), образующим делитель напряжения вместе с сопротивлением, входящим в состав драйвера. Параллельный ему конденсатор CCFG определяет время блокирования (tbl) схемы защиты. Более подробную информацию о выборе этих элементов можно найти в техническом описании (Technical Explanations) соответствующего драйвера.
Топология PCB
Во многом компоновка печатной платы c элементами цепи управления определяется требованиями к резисторам затвора, описанным выше. Одна из рекомендаций — использование большого полигона под резисторами затвора, что позволяет снизить распределенную индуктивность и улучшить тепловые режимы.
На рис. 17 приведен пример топологии печатной платы с резисторами затвора: в левой части RGon (R251//R252//R253), в центре — RGoff (R254//R255//R256). Верхний слой платы содержит большие участки омеднения под резисторами, обеспечивающие, в том числе, отвод тепла. В правой части рис. 17 (нижний слой РСВ) показан большой эмиттерный полигон, расположенный под резисторами и уменьшающий площадь токового контура, образующего паразитную индуктивность в цепи затвор-эмиттер.

Рис. 17. Пример топологии PCB с резисторами затворов
Изоляционные зазоры
При проектировании схемы управления затворами важно обеспечить требуемые изоляционные характеристики, которые в первую очередь определяются свойствами «ядра». Большинство двухканальных драйверов семейства SKYPER разделено на изолированные зоны, каждая из них имеет собственные коннекторы для подключения к адаптеру (рис. 18). На плате «ядра» могут делаться прорези для увеличения путей токов утечки; их необязательно дублировать на PCB адаптера, если там соблюдены все необходимые требования по разделению низковольтных и высоковольтных каскадов.

Рис. 18. Внешний вид «ядра» драйвера SKYPER 12 PV, изоляционные прорези на PCB
Более подробная информация, касающаяся стандартов и методов определения параметров изоляции, приведена в [8].
Заключение
Разработка устройства управления изолированными затворами является сложной и ответственной задачей, которая во многом упрощается благодаря наличию «ядер» драйверов, обеспечивающих все необходимые функции. Использование подобных «ядер» позволяет разработчику сосредоточиться на выборе силовых модулей, тепловом расчете и проектировании силового каскада. В статье даны полезные рекомендации, позволяющие выбрать и настроить «ядро». Однако никакие формулы и методики не позволяют определить идеальные значения компонентов для конкретного применения. Корректные номиналы резисторов затвора, элементов схемы защиты и т. д. могут быть найдены только в ходе тщательных лабораторных испытаний, наиболее информативным из которых является так называемый двухимпульсный тест [4].
- Материалы сайта www.SEMIKRON.com
- Wintrich A., Nicolai U., Tursky W., Reimann T. Application Manual Power Semiconductors. 2nd edition. ISLE Verlag, 2015.
- Hofstötter N. Limits and hints how to turn off IGBTs with unipolar supply. AN 1401, Rev. 02. SEMIKRON International GmbH, 2015.
- Lamp J. IGBT Peak Voltage Measurement and Snubber Capacitor Specification. AN 7006, Rev. 00. SEMIKRON International GmbH, 2008.
- Hofstötter N. IGBT Modules in Parallel Operation with Central and Individual Driver Board. AN 17-001, Rev. 00. SEMIKRON International GmbH, 2017.
- Колпаков А. IGBT Gen. 7 — революционная эволюция // Силовая электроника. № 1.
- Weiss R. High voltage testing. AN 16-002, Rev. 02. SEMIKRON International GmbH, 2019.
- Weiss R. Coordination of insulation. AN 1405, Rev. 03. SEMIKRON International GmbH, 2017.
- Хермвиль М., Колпаков А. Управление изолированным затвором // Электронные компоненты. 2008. № 6, 8.
- Крапп Й. Защитные функции современных драйверов IGBT // Силовая электроника. 2010. № 5.
- Крапп Й., Колпаков А. SKYPER 42 — развитие концепции ядра // Силовая электроника. 2011. № 1.
 22 февраля, 2021
22 февраля, 2021 5 сентября, 2011
5 сентября, 2011