
Школа MATLAB. Урок 18. Аналитическое и модельное исследование активного трехфазного полупроводникового выпрямителя
Введение
Основу активного трехфазного полупроводникового выпрямителя (АВ) составляет схема, представленная на рис. 1а. В этой схеме, так же как и в повышающем импульсном преобразователе [2, 3],на периоде модуляции имеют место лишь два состояния силовой цепи. В первом состоянии (назовем его импульсом) источник питания через дроссели и соответствующие полупроводниковые ключи подсоединен к выходным зажимам АВ (к конденсатору). Состояние импульса может быть реализовано при включении шести различных сочетаний силовых полупроводниковых ключей (VT1, VT4, VT6; VT3, VT2, VT6; VT5, VT2, VT4; VT2, VT3, VT5; VT4, VT1, VT5; VT6, VT1, VT3).

Рис. 1. Схемы АВ:
а) принципиальная;
б) функциональная
Во втором состоянии (назовем его паузой) источник питания через дроссели замкнут накоротко. Состояние паузы реализуется при включении двух сочетаний силовых полупроводниковых ключей (VT1, VT3, VT5; VT2, VT4, VT6).
Математическое описание АВ
Базой аналитических методов рассматриваемого класса систем служит теоретическое положение, разработанное А. А. Булгаковым [1], заключающееся в том, что электромагнитные и энергетические характеристики АВ определяются основной (гладкой) составляющей. Пульсации токов и мощностей в системе, вызванные переключением силовых полупроводниковых элементов, приводят к незначительным искажениям формы токов и дополнительным (обычно незначительным) потерям. Основываясь на этом положении, удается аналитически описать и исследовать некоторые характерные режимы работы АВ по гладкой (основной) составляющей.
В дальнейшем, после создания модели, эти режимы можно протестировать на модельной установке, сравнить их с полученными аналитическими результатами и доказать адекватность модели. Построение модели системы сродни разработке экспериментального образца. Поэтому обычно такая задача решается методом последовательных приближений, при котором приходится иногда возвращаться к началу, перепроверяя аналитический и модельный эксперименты.
В основе математического описания электромагнитных процессов в АВ по гладкой составляющей лежит метод пространственного вектора [5]. При описании электромагнитных процессов с использованием метода пространственного вектора функциональная схема АВ преобразуется к виду, представленному на рис. 1б. В этой функциональной схеме преобразователь с одной стороны подключен к трехфазной сети переменного тока с напряжением (–U1) через дроссель, с другой — к цепи постоянного тока с фильтром.
Со стороны сети математическое описание АПП может быть представлено в виде:

где –U1 — результативный вектор напряжения сети; –E01 — результативный вектор противо-ЭДС АВ по первой гармонике; r, x — активное и реактивное сопротивления, учитывающие сопротивление источника, дросселя и двух проводящих полупроводниковых приборов АВ.
По отношению к сети переменного тока АВ генерирует ЭДС, первая гармоника (гладкая составляющая) которой равна [5]:

где ud — напряжение в звене постоянного тока, m — коэффициент модуляции, jm — фаза напряжения модуляции по отношению к напряжению сети.
В синхронно вращающейся системе координат (x — вещественная ось и y — мнимая ось) при совмещении вещественной оси с вектором напряжения сети уравнения (1, 2) запишутся в виде:

Для полного описания АВ систему уравнений (3) следует дополнить уравнением энергетического баланса между сетью и нагрузкой и уравнением Кирхгофа в цепи постоянного тока:
где C, R — емкость конденсатора фильтра и сопротивление нагрузки.
Статические характеристики АВ
В установившемся режиме уравнения (3, 4), описывающие АВ, преобразуются к виду:


Некоторые свойства АВ удобно выяснить не прибегая к решению, используя векторные диаграммы, построенные для установившегося режима работы. Векторные диаграммы АВ в синхронно вращающейся системе координат (x) и (y) для двух характерных режимов работы, построенные по уравнениям (5, 6), показаны на рис. 2. Эти диаграммы построены в предположении x>>r, что обычно и имеет место в АВ.

Рис. 2. Векторные диаграммы АВ
При работе активного выпрямителя фаза между напряжением сети и током, потребляемым АВ, j< 90°, при этом для E01< U1 этот ток имеет индуктивный характер, а для E01 > U1 — емкостный характер. При работе АВ в режиме активного выпрямителя фаза модуляции jm отрицательна. Этот предварительный качественный анализ позволяет в дальнейшем построить модель АВ и оценить ее адекватность. Здесь необходимо заметить, что активная мощность, передаваемая преобразователем в нагрузку, главным образом зависит от значения фазы модуляции.
Уравнения (5, 6) позволяют аналитически исследовать статические характеристики АВ. Основная статическая характеристика, представляющая зависимость выходного напряжения от коэффициента и фазы модуляции, определяется на основании совместного решения уравнений (5, 6) в установившемся режиме. Тогда уравнение для определения напряжения на нагрузке (в звене постоянного тока) будет записано в виде:

где R — сопротивление нагрузки, z = √r2 + x2 — полное сопротивление АВ на стороне переменного тока. Все дальнейшие исследования осуществляются в относительных (безразмерных, pu — per units) величинах. За базовые значения приняты следующие напряжение и ток: Ub = U1, Ib = Ub/z, уравнение (7) в относительных величинах запишем в виде:

Напряжение на выходе АВ зависит от его собственных параметров, от сопротивления нагрузки и параметров управления. Взяв производную по фазе в уравнении (8), можно определить ее значение, при котором напряжение на выходе максимально.
jmmax = –arctg(x/r). (9)
Из уравнения (8) следует, что напряжение на нагрузке при постоянных параметрах АВ зависит как от коэффициента модуляции m, так и от фазы модуляции jm. Предельная для любого значения сопротивления нагрузки R величина выходного напряжения достигается при единственном значении фазы модуляции, определенной уравнением (9).
На рис. 3 показаны рассчитанные по уравнениям (8) регулировочные характеристики, построенные в функции от коэффициента модуляции m при фазе модуляции jm = ±1,5 рад для АВ с различными сопротивлениями нагрузки и со следующими параметрами: U1 = 310 B, r = 0,4 Ом, x = 3,14 Ом.

Рис. 3. Регулировочные характеристики АВ при jm = –1,5 рад
На рис. 4 представлены рассчитанные по уравнениям (8) для тех же параметров АВ регулировочные характеристики, построенные в функции от фазы модуляции jm при постоянном (максимальном) коэффициенте модуляции m = 1,0.

Рис. 4. Регулировочные характеристики АВ при m = 1,0
Из системы уравнений (3) рассчитываются электромагнитные и энергетические характеристики АВ в относительных единицах (pu — per units).


где Ud(pu) = Ud/Ub, Ix(pu) = Ix/Ib, Iy(pu) = Iy/Ib — относительные величины напряжения и токов.
Относительная мощность в звене постоянного тока и относительные потери в АВ определятся из уравнений:

Зависимости токов от коэффициента модуляции при постоянном значении фазы модуляции jm = –1,5 рад показаны на рис. 5. Уравнения (11) свидетельствуют о том, что такие же зависимости имеют активная и реактивная (с обратным знаком) мощности, потребляемые АВ от сети.

Рис. 5. Электромагнитные характеристики АВ
Составляющая тока Ix определяет активную мощность, потребляемую АВ из сети. Составляющая тока Iy, сдвинутая по фазе на 90 градусов относительно напряжения, определяет реактивную мощность, потребляемую АВ из сети. При значениях jm, не превышающих величины, определенной уравнением (9), АВ потребляет из сети положительную (индуктивную) мощностью.
Результаты исследования, представленные выше, свидетельствуют о том, что при независимом алгоритме управления АВ может обеспечить требование PF = 1 только при фиксированных значениях коэффициента модуляции, напряжении на нагрузке и сопротивлении нагрузки.
Исследование динамических характеристик АВ
Полное математическое описание, выраженное уравнениями (3, 4), свидетельствует о том, что АВ представляет собой существенно нелинейную динамическую систему. Возможности аналитического исследования такой системы весьма ограничены, но представленное математическое описание позволяет построить структурную модель АВ, на которой можно оценить его динамические свойства. Такая модель построена в пакете Simulink и представлена на рис. 6.

Рис. 6. Структурная модель АВ
Модель содержит два канала определения токов, составленных по уравнениям (3) (Сanal_X, Canal_Y), в блоке Uc вычисляется напряжение на выходе АB по второму уравнению (4), в блоке F(u) вычисляется ток id по первому уравнению (4). Блоки m, Fm, Step1 задают время и величину изменения коэффициента модуляции, фазы модуляции и сопротивления нагрузки. При исследовании динамических режимов последовательно изменялся только один сигнал, а два других оставались постоянными. Результаты моделирования приведены на рис. 7–9. На рис. 7 показан переходной процесс напряжения на выходе, активного Ix и реактивного Iy тока в сети от времени при скачкообразном (в момент времени 0,2 с) изменении коэффициента модуляции от 0,2 до 1 при постоянной фазе модуляции jm = –1,5 и постоянном сопротивлении нагрузки R = 30 Ом.

Рис. 7. Переходные процессы в АВ при включении и изменении коэффициента модуляции от 0,2 до 1 при постоянных jm = –1,5 и R = 30 Ом
На рис. 8 показан переходной процесс по напряжению на выходе, активному Ix и реактивному Iy току в сети от времени при скачкообразном (в момент времени 0,2 с) изменении фазы модуляции от jm = –0,5 до –1,5 при постоянном коэффициенте модуляции m = 1 и постоянном сопротивлении нагрузки R = 30 Ом.
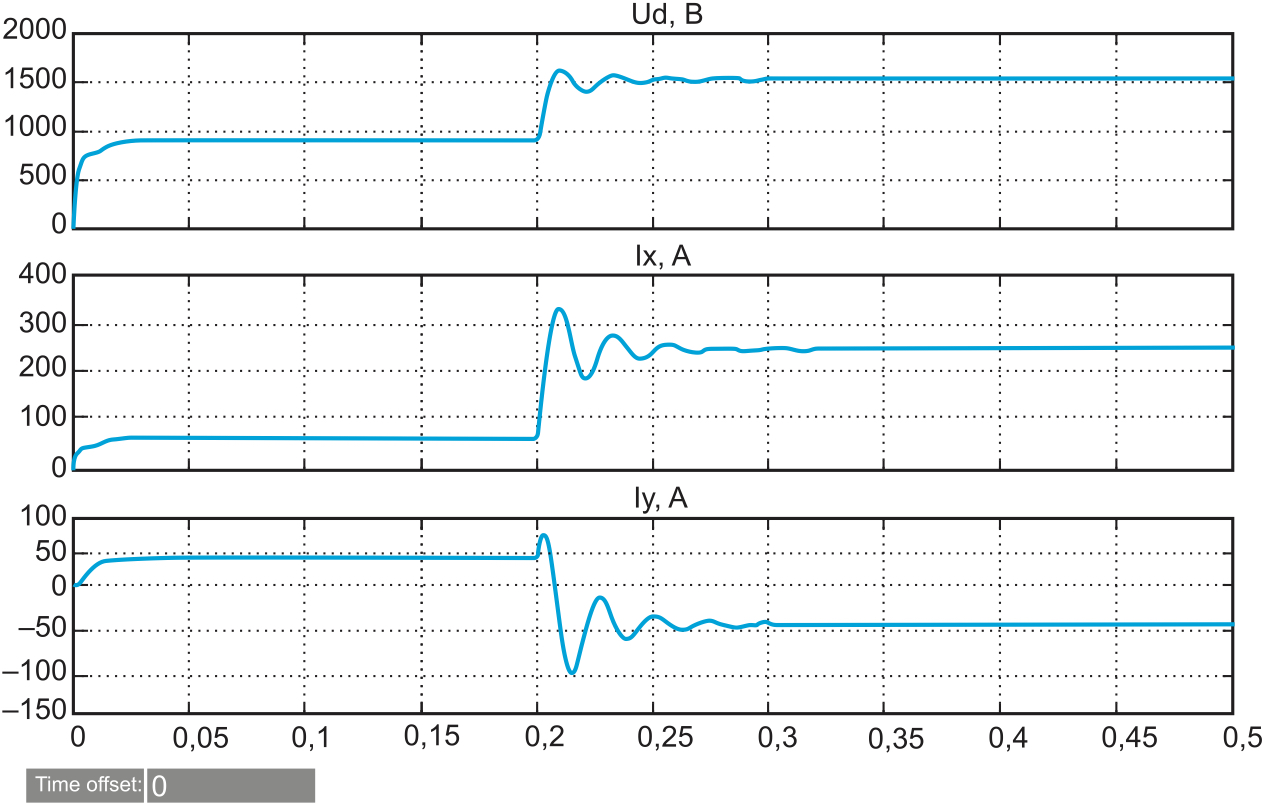
Рис. 8. Переходные процессы в АВ при изменении фазы модуляции от jm = –0,5 до –1,5 при постоянном коэффициенте модуляции m = 1 и постоянном сопротивлении нагрузки R = 30 Ом
На рис. 9 показан переходной процесс по напряжению на выходе, активному Ix и реактивному Iy току в сети от времени при скачкообразном (в момент времени 0,2 с) изменении сопротивления нагрузки R от 30 до 10 Ом, при этом коэффициент и фаза модуляции оставались постоянными jm = –1,5, m = 1.
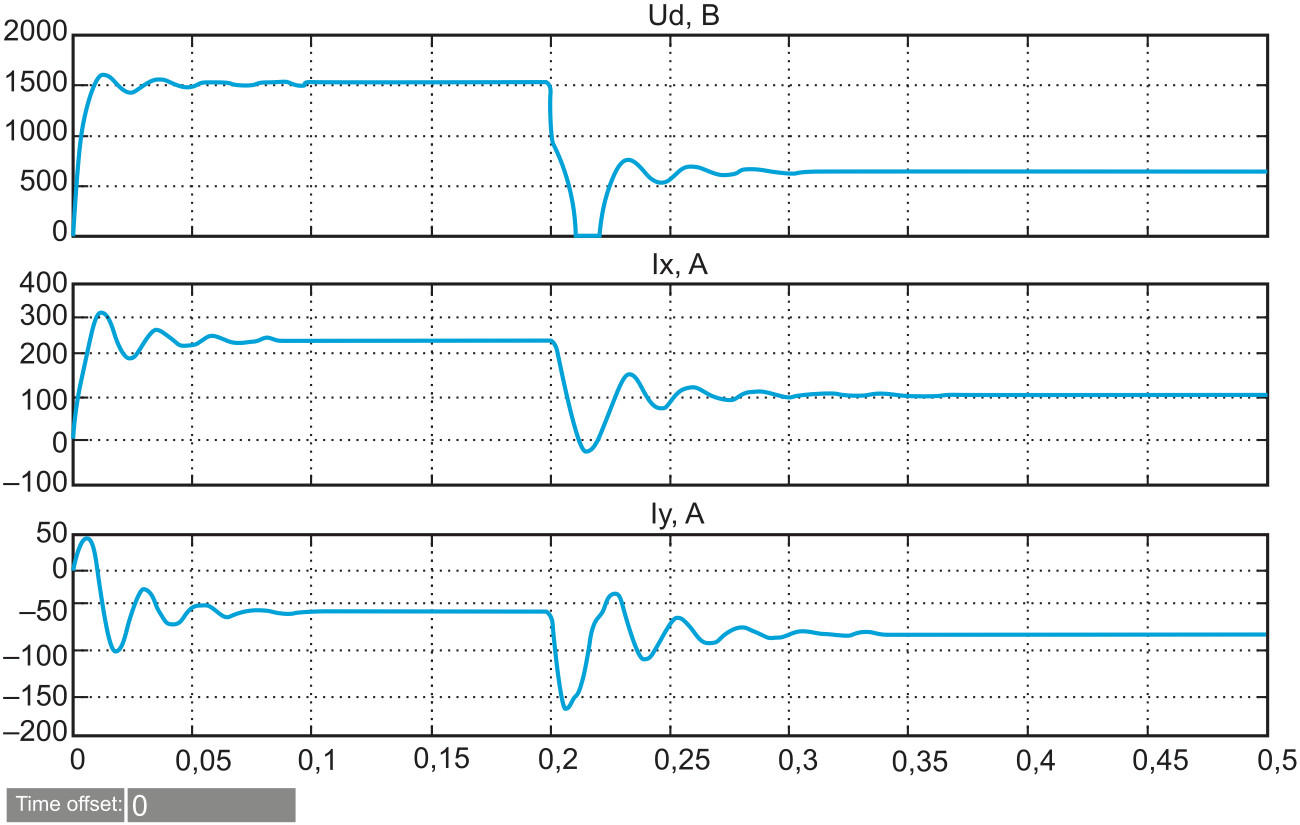
Рис. 9. Переходные процессы в АВ при изменении сопротивления нагрузки R от 30 до 10 Ом, при постоянных jm = –1,5, m = 1
Анализ результатов моделирования показывает:
- переходные процессы в АВ при независимом управлении носят колебательный характер;
- напряжение на выходе во время переходных процессов не может быть отрицательным вследствие наличия диодного моста в схеме АВ;
- установившиеся значения переменных совпадают со значениями, рассчитанными выше и представленными на рис. 3, 4.
Статические характеристики АВ при токовом управлении
Как было показано выше, при независимом алгоритме управления АВ может обеспечить требование PF = 1 только при фиксированных значениях коэффициента модуляции, напряжении на нагрузке и сопротивлении нагрузки.
Поэтому при построении схемы управления АВ, рассчитываемого на работу с изменяющимся сопротивлением нагрузки, приходится отказаться от независимого алгоритма управления. Для непосредственного задания активной и реактивной составляющих тока на входе АВ необходимо организовать токовое управление преобразователем. В этом случае управление организуется в синхронно вращающейся системе координат (x, y), с релейной отрицательной обратной связью по составляющим ix, iy тока. Такое управление получило название «токовый коридор».
Решающе важными для исследования и последующего построения адекватной модели АВ с токовым управлением являются вопросы, связанные с ограничениями. Эти ограничения связаны с физическими процессами в схеме, они позволяют определить диапазон изменения задающих токовых сигналов, при которых аналитические зависимости (3, 4), описывающие АВ, остаются справедливыми.
Физическим ограничением в схеме является ток в сети, который определяется по уравнению (10). На рис. 10 построены зависимости относительного тока в сети от фазы модуляции при трех значениях коэффициента модуляции. Эти зависимости имеют максимум и минимум, которые и определяют диапазон изменения тока задания при токовом управлении. Для реализации PF = 1 следует задавать только активный ток Ix, а ток Iy = 0. В этом случае полный ток сети равен активному току и зависимости (рис. 10) определяют диапазон возможного изменения задания активного тока.

Рис. 10. Зависимости относительного тока в сети от фазы модуляции при трех значениях коэффициента модуляции
Исследование динамических характеристик АВ в замкнутой по току системе
Для непосредственного задания активной и реактивной составляющих тока на входе АВ необходимо реализовать управление инвертором в синхронно вращающейся системе координат (x, y), с релейной отрицательной обратной связью по току.
При таком управлении электромагнитные и энергетические характеристики АВ описываются уравнениями (4), в которых ixи iy являются заданными функциями. Модель АВ, в которой реализовано раздельное управление по проекциям тока в сети Ixи Iy = 0, представлена на рис. 11.

Рис. 11. Модель АВ при токовом управлении
Результаты моделирования электромагнитных процессов в АВ при токовом управлении показаны на рис. 12, 13.

Рис. 12. Переходные процессы при скачкообразном изменении заданного активного тока от 50 до 250 А при неизменном сопротивлении нагрузки R = 30 Oм
На рис. 12 представлены переходные процессы при подключении АВ при заданном активном токе 50 А с последующим (в момент 0,2 с) изменением заданного тока до 250 А при неизменном сопротивлении нагрузки R = 30 Oм. На рис. 13 показаны переходные процессы при постоянном заданном токе 250 А и изменении сопротивления нагрузки (в момент времени 0,2 с) от 30 до 10 Ом.

Рис. 13. Переходные процессы при включении и скачкообразном изменении сопротивления нагрузки от 30 до 10 Ом и заданном активном токе 250 А
Анализ переходных процессов при токовом управлении с поддержанием нулевого значения реактивной составляющей тока сети свидетельствует о том, что АВ в этом случае можно считать апериодическим звеном с постоянной времени t ≈ RC.
Модельное исследование АВ в замкнутой по напряжению системе
Для стабилизации или регулирования выходного напряжения активного выпрямителя канал управления активным током включается в контур стабилизации напряжения в звене постоянного тока АВ. Причем контур напряжения строится как внешний по отношению к контуру активного тока. Поэтому в модель (рис. 11) добавляется внешний контур по напряжению АВ.
Модель, которая позволяет исследовать электромагнитные, энергетические и динамические характеристики АВ при задании напряжения в звене постоянного тока и раздельном управлении по проекциям тока в сети Ix и Iy, представлена на рис. 14.

Рис. 14. Модель АВ при токовом управлении с контуром задания напряжения
В отличие от структурной модели (рис. 11) здесь добавлен внешний контур стабилизации напряжения с ПИД-регулятором. Переходные процессы по активному току в сети и напряжению на выходе при включении АВ и при изменении нагрузки показаны на рис. 15. Параметры ПИД-регулятора рассчитываются исходя из требований к переходному процессу в системе, которая приблизительно описывается апериодическим звеном.

Рис. 15. Переходные процессы в АВ при включении и при изменении нагрузки от 30 до 10 Ом
Заключение
Активный трехфазный полупроводниковый выпрямитель является нелинейной динамической системой с дискретно изменяющимися параметрами и регулируемым эффектом накопления энергии. Математическое описание такой системы по «гладкой» составляющей представляется дифференциальным уравнением первого и второго порядка. Всестороннее исследование динамических свойств АВ может быть осуществлено с использованием структурных моделей, в которых учтены как его линейные, так и нелинейные свойства.
Любопытный читатель может провести исследование динамических процессов АВ с помощью виртуальных моделей, описанных в [4], и убедиться в аналогичности результатов анализа с приведенными в статье.
Работа выполнена при государственной финансовой поддержке ведущих университетов Российской Федерации (субсидия 074-U01).
- Булгаков А. А. Новая теория управляемых выпрямителей. М.: Наука, 1970.
- Герман-Галкин С. Г. Виртуальные лаборатории устройств силовой электроники в среде Matlab — Simulink. Урок 17. Динамические режимы работы импульсного повышающего преобразователя // Силовая электроника. 2013. № 4.
- Герман-Галкин С. Г. Виртуальные лаборатории устройств силовой электроники в среде Matlab — Simulink. Урок 12. Исследование импульсного повышающего регулятора постоянного напряжения // Силовая электроника. 2010. № 1.
- Герман-Галкин С. Г. Виртуальные лаборатории полупроводниковых систем в среде Matlab — Simulink. Изд-во «Лань», Санкт-Петербург, 2013.
- Розанов Ю. К. Силовая электроника. Москва. Издательский дом МЭИ, 2007.
 2 марта, 2011
2 марта, 2011 24 июня, 2021
24 июня, 2021 11 августа, 2008
11 августа, 2008