
Школа MATLAB. Урок 21. Модельный многовариантный синтез асинхронного электропривода
Введение
Стремление сделать модель максимально приближенной к реальному объекту повышает ее сложность и, как следствие, затраты на разработку и программную реализацию. В некоторых случаях модель может стать настолько сложной, что отладка ее будет просто невозможна. Таким образом, модель должна быть достаточно простой (без потери адекватности!). Собственно, искусство моделирования и состоит в том, чтобы построить модель, которая наиболее адекватна из всех простых и наиболее проста из всех адекватных.
В основе построения модели системы лежит математическое описание ее отдельных блоков различной физической природы и их связей. Поэтому математика, отражающая физику процессов в системе, должна присутствовать, а представлением этой математики в среде MATLAB–Simulink являются структурные модели.
Однако современный уровень развития инструментальных средств моделирования таков, что он позволяет исключить запись уравнений, предоставляя исследователю исчерпывающий набор виртуальных средств. Они дают в руки разработчику инструменты, позволяющие работать с виртуальной моделью реального объекта, при этом математика (вся или существенная ее часть) уходит как бы на задний план (уравнения создаются самой инструментальной средой, они не «видны»). Такие модели при проектировании следует использовать на начальном этапе, когда еще не создано математическое описание, необходимое для решения задач синтеза электропривода. В этом случае виртуальная модель служит эталоном, по которому можно сверять результаты исследования на структурных моделях.
Асинхронный двигатель с короткозамкнутым ротором (АКЗ) является существенно нелинейным объектом управления. Основой построения таких систем автоматического управления служит метод структурного синтеза, описанный в работе Бойчука Л. М. [1]. Дальнейшее развитие этого метода осуществлено в работе Попова О. С. при решении обратных задач динамики [9]. В данной статье этот метод использован при многовариантном синтезе асинхронного электропривода.
Модельное исследование динамики электромеханической части асинхронного электропривода
Для моделирования выбран асинхронный короткозамкнутый двигатель (АКЗ) 20HP (15 кВт) со следующими паспортными данными и параметрами:
UAB = 400 B; U1m = 310 B;
f1 = 50 Гц; w1 = 314 1/c;
Rs = 0,2147 Ом; RR = 0,2205 Ом;
LS = LR = 0,06518 Гн, Lm = 0,06419 Гн;
J = 0,102 кг·м2; p = 2.
Виртуальная (имитационная) модель электромеханической части асинхронного электропривода приведена на рис. 1. Эта модель содержит асинхронный короткозамкнутый двигатель (блок Asynchronous Machine), трехфазный автономный инвертор напряжения (блок Universal Bridge) с источником питания постоянного тока (блок DC). Автономный инвертор напряжения (АИН) управляется от широтно-импульсного модулятора (ШИМ) с синусоидальной модуляцией (блок PWM Generator). Момент нагрузки на валу асинхронной машины зависит от механических свойств объекта регулирования и механической передачи между машиной и объектом. Далее рассматриваются системы со статическим моментом нагрузки, равным номинальному. В представленной модели напряжение на фазах двигателя и частота, являясь переменными режима, могут изменяться независимо друг от друга. Исследование динамических процессов в модели осуществляется при сохранении постоянного отношения U1m/w1 = 310/314 ≈ 1. Результаты моделирования переходных процессов по моменту и скорости (рис. 2) свидетельствуют о том, что асинхронный двигатель при управлении от инвертора является нелинейным и колебательным объектом регулирования.

Рис. 1. Модель электромеханической части (АКЗ с АИН) асинхронного электропривода

Рис. 2. Результаты моделирования переходных процессов по моменту и скорости в виртуальной модели
Структурный синтез электропривода с АКЗ
Необходимым условием синтеза асинхронного электропривода является математическое описание асинхронного двигателя (объекта регулирования). В основе этого математического описания лежит метод результирующего вектора [5] и метод основной (гладкой) составляющей [2]. Математическое описание АКЗ с АИН осуществляется в неподвижной системе координат с вещественной осью α и мнимой осью β. Это математическое описание хорошо известно из литературы [4, 7, 8]:

В системе уравнений (1) r = (RS+kR2RR), LS‘ = (LS–Lm2/LR), kR = Lm/LR, TR = LR/RR — параметры АКЗ; isa, isb, YRa, YRb, wm — переменные состояния АКЗ: токи, потокосцепления и угловая скорость ротора; M, MH — электромагнитный момент на валу двигателя и номинальный нагрузочный момент; J — суммарный момент инерции двигателя и приведенного рабочего механизма.
Уравнения (1) в операторной форме запишутся в виде:

Структурная модель АКЗ, построенная по уравнениям (2), показана на рис. 3.

Рис. 3. Модель АКЗ с АИН в неподвижной (естественной) системе координат
Коэффициенты, рассчитанные для выбранного двигателя и необходимые для моделирования уравнений (2):
- r = 0,4285 Ом;
- Ts‘ = 0,0046 c;
- TR = 0,2956 c;
- kR = 0,9848;
- Ls‘ = 0,00196 Гн.
На вход модели в момент времени t = 0 подаются напряжения usa = U1msinw1t, usb = U1msin(w1t–p/2), представляющие собой амплитуду первой (основной) гармоники напряжения на выходе АИН с ШИМ по синусоидальному закону [6]. Теоретическое обоснование возможности такого представления напряжения на двигатель дано в [4].
Результаты моделирования переходных процессов по моменту и скорости показаны на рис. 4, и они полностью совпадают с результатами виртуальной модели (рис. 2), что подтверждает адекватность структурной модели, построенной по уравнениям (2).

Рис. 4. Результаты моделирования переходных процессов по моменту и скорости в структурной модели в неподвижной системе координат
Колебательность и нелинейность АКЗ как объекта регулирования теперь легко объясняются наличием нелинейных (блоки умножения) перекрестных связей между каналом, в котором формируется потокосцепление ротора, и каналом, в котором формируется ток статора.
При наличии адекватной математической модели электромеханической подсистемы асинхронного электропривода можно приступить к его многовариантному структурному синтезу, который осуществим в несколько этапов.
Этап 1
На первом этапе математическое описание АКЗ вместе с АИН представляется во вращающейся с относительной угловой скоростью wk системе координат с вещественной осью x и мнимой осью y. Тогда уравнения (2) в операторной форме запишутся в виде:
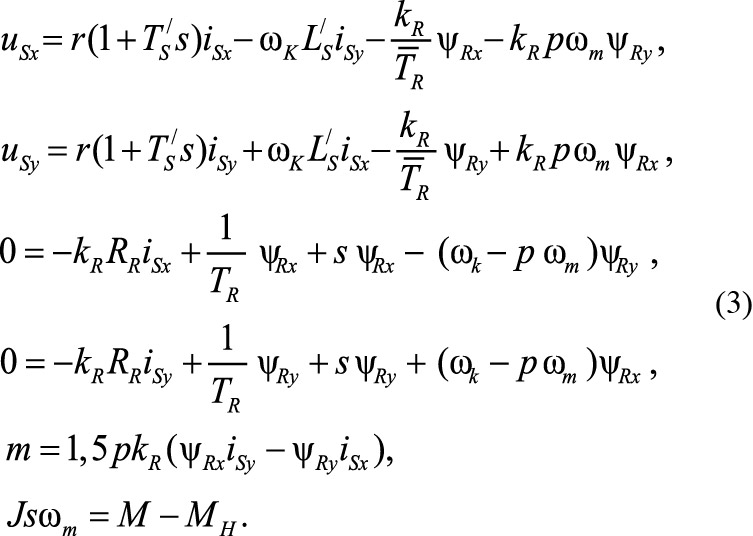
Модель, построенная по уравнениям (3), представлена на рис. 5.

Рис. 5. Модель АКЗ с АИН во вращающейся системе координат
Переходные процессы в модели по моменту и скорости приведены на рис. 6. Сравнивая переходные процессы в АКЗ с АИН, полученные для виртуальной модели (рис. 2), модели в неподвижной системе координат (рис. 4) и модели во вращающейся системе координат (рис. 6), видим их полную идентичность. Это обстоятельство показывает, что для анализа собственно электрической машины выбор системы координат не играет роли. Однако для синтеза замкнутых систем выбор системы координат является решающим.

Рис. 6. Результаты моделирования переходных процессов по моменту и скорости в структурной модели во вращающейся системе координат
Это особенно проявляется при синтезе параметров регуляторов и при моделировании всей системы в пакете Simulink, так как этот пакет обладает своими особенностями и возможностями, которые можно с успехом использовать при решении поставленных задач.
При построении асинхронного электропривода структурный синтез связан с выбором базового результирующего вектора [7]. Базовым результирующим вектором считается тот, который совмещается с одной (обычно вещественной) вращающейся осью комплексной плоскости.
Этап 2
Управление электроприводом организуется так, чтобы базовым вектором был вектор потокосцепления ротора. Математически это значит, что вектор –ψR совмещен с осью x вращающейся системы координат, тогда в уравнениях (3) следует принять ψRy = 0, –ψR = ψRx, и система уравнений (3) запишется в виде:

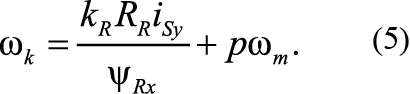
Реализация второго этапа синтеза требует соблюдения условия, при котором угловая скорость вращения системы координат в соответствии с четвертым уравнением системы (4) зависeла бы от значений переменных состояния машины и определялась из уравнения:
Это значит, что система уравнений (4) описывает уже не АКЗ с АИН, а некую мехатронную систему, в которой асинхронный двигатель управляется так, чтобы выбранный вектор был совмещен с вещественной осью вращающейся системы координат. В этой модели частота модуляции инвертора, являясь функцией переменных состояния, не может изменяться независимо от них. Структурная модель системы во вращающейся системе координат, совмещенной с потокосцеплением ротора, показана на рис. 7.

Рис. 7. Структурная модель мехатронной системы во вращающейся системе координат с базовым вектором потокосцепления ротора
В этой структуре блок Subsystem, в котором рассчитывается скорость вращения координат (частота модуляции в АИН) по уравнению (5), является уже блоком, который должен быть реализован в системе управления.
В этом случае, как это видно из структурной схемы (рис. 7), рассматриваемая мехатронная система имеет два взаимосвязанных канала: канал по составляющей x, определяющий потокосцепление ротора, и канал по составляющей y, определяющий составляющую тока isy. Взаимосвязь каналов не позволяет разделить электромагнитные процессы во времени, т. к. модули проекций векторов напряжения на оси связаны уравнением Usx2+Usy2 = U1m2.
Результаты моделирования синтезированного на втором этапе электропривода с АКЗ показаны на рис. 8. В сравнении с предыдущими результатами (рис. 2, 4, 6), здесь отсутствуют колебательные процессы токов, потокосцепления и скорости вследствие того, что перекрестные связи в каналах потокосцепления и скорости значительно ослаблены медленным нарастанием скорости вращения координат.

Рис. 8. Результаты моделирования переходных процессов по моменту и скорости в структурной модели в системе координат, вращающейся со скоростью, определенной уравнением (5)
В системе, синтезированной на этом этапе, переходный процесс по потокосцеплению значительно затянут. Этим объясняется затягивание переходного процесса по скорости аналогично тому, как это происходит в двигателе постоянного тока с независимым возбуждением при изменении потока возбуждения.
Этап 3
Предполагая, что все переменные состояния (в том числе и потокосцепление ротора) можно измерить или вычислить, управление организуется так, чтобы на выходе канала x поддерживать постоянное значение потокосцепления ротора, а на выходе канала y поддерживать заданную скорость вала двигателя.
Потокосцепление ротора и скорость вращения ротора являются независимыми переменными состояния системы, поэтому задающие сигналы в рассматриваемой структуре могут быть разделены во времени. Для такой реализации необходимо в канале x синтезировать регулятор потокосцепления, на входе которого поддерживать постоянный сигнал, а в канале y синтезировать регулятор скорости. В этом случае структурная схема электропривода с АКЗ повторяет структурную схему электропривода постоянного тока с ДПТ с независимым возбуждением.
Параметрический синтез регуляторов в таком электроприводе осуществляется для каждого канала независимо, в соответствии с классической процедурой [7]. Структурная модель электропривода с АКЗ на этом этапе синтеза показана на рис. 9.

Рис. 9. Структурная схема замкнутой асинхронной системы с векторным управлением
Управление в такой структуре осуществляется аналогично системе электропривода постоянного тока: первоначально устанавливается значение потока, а затем подается сигнал в канал управления скоростью. Результаты моделирования в синтезированной на третьем этапе системе электропривода приведены на рис. 10. В этой системе перекрестные связи в каналах потокосцепления и скорости значительно ослаблены наличием отрицательных обратных связей и регуляторов в этих каналах. Здесь уже можно разделить во времени переходные процессы по потоку и скорости, а кроме того, изменением задающего сигнала в канале скорости можно изменять амплитуду тока в канале y, тем самым изменяя ток статора АКЗ.

Рис. 10. Электромагнитные и электромеханические процессы в асинхронном электроприводе
Этап 4
Для компенсации влияния перекрестных связей, а также для ограничения токов в фазах двигателя следует в каждом канале добавочно включить регулятор тока. Преимущественное применение в асинхронном электроприводе получили релейные регуляторы тока, обеспечивающие скользящий режим по току («токовый коридор») [3]. На четвертом этапе синтеза рассмотрим систему с релейными регуляторами тока в каналах.
Модель такой системы показана на рис. 11. Электромагнитные и электромеханические переходные процессы при ограничении токов на уровне 50 А представлены на рис. 12.

Рис. 11. Модель асинхронного электропривода с релейными контурами тока в каналах

Рис. 12. Переходные процессы в асинхронном электроприводе с релейными контурами тока в каналах
На этом этапе можно закончить процедуру структурного синтеза электропривода и приступить к его пошаговой модельной реализации. Эту реализацию осуществим для структуры электропривода с токовыми контурами (рис. 11). Алгоритм такой реализации должен содержать:
- Представление асинхронной машины в неподвижной (естественной) системе координат.
- Преобразование управляющих сигналов из вращающейся системы координат (x,y) в неподвижную систему координат (a,b) по уравнениям:
usa = usxcoswkt–usysinwkt,
usb = usxsinwkt+usycoswkt. (6)
- Преобразование переменных состояния (токов, потокосцеплений), измеренных в двигателе, из неподвижной системы координат (a,b) во вращающуюся систему координат (x,y) для использования их в управляющей части для реализации обратных связей и для расчета скорости вращения координат. Эти преобразования осуществляются по уравнениям:
usx = usacoswkt+usbsinwkt,
usy = –usasinwkt+usbcoswkt; (7)

- Вычисление угла поворота системы координат путем интегрирования скорости, полученной на основании уравнения (8) в блоке Subsystem.
Этап 5
На этом этапе структурная модель электропривода (рис. 13) реализуется в соответствии с приведенным алгоритмом.

Рис. 13. Структурная модель электропривода с двойным преобразованием системы координат
Преобразование управляющих сигналов из вращающейся системы координат (x,y) в неподвижную систему координат осуществляется в блоке x,y_a,b. Преобразование переменных состояния (токов, потокосцеплений) из неподвижной системы координат (a,b) во вращающуюся систему координат осуществляется в блоках a,b_x,y. Асинхронная машина представлена моделью в неподвижной системе координат (рис. 3). Параметры регуляторов потокосцепления, токов и скорости взяты из модели, приведенной на рис. 11.
Результаты моделирования, полученные на данной модели (рис. 14), полностью совпадают с результатами, полученными выше, что является очередным подтверждением адекватности модели.

Рис. 14. Переходные процессы в электроприводе с двойным преобразованием системы координат
Этап 6
На этом этапе модель электропривода строится аналогично реальной системе. Модель содержит:
- Электромеханическую подсистему, включающую виртуальную модель АКЗ с АИН, реализованную в неподвижной системе координат. Эта модель при дальнейшем проектировании заменяется физической моделью.
- Схему управления, реализованную во вращающейся системе координат. В соответствии с этой моделью в дальнейшем проектируется микроконтроллер.
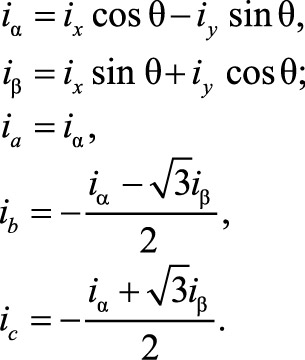
- Преобразователи координат из неподвижной трехфазной (a,b,c) во вращающуюся двухфазную систему координат (x,y) в соответствии с уравнениями:

- Преобразователи координат из вращающейся (x,y) в неподвижную (a,b,c) в соответствии с уравнениями:
- Измерительную часть.
Полная модель асинхронного электропривода представлена на рис. 15. Модели отдельных блоков системы управления и блоков преобразования координат с поясняющими уравнениями показаны на рис. 16–20.
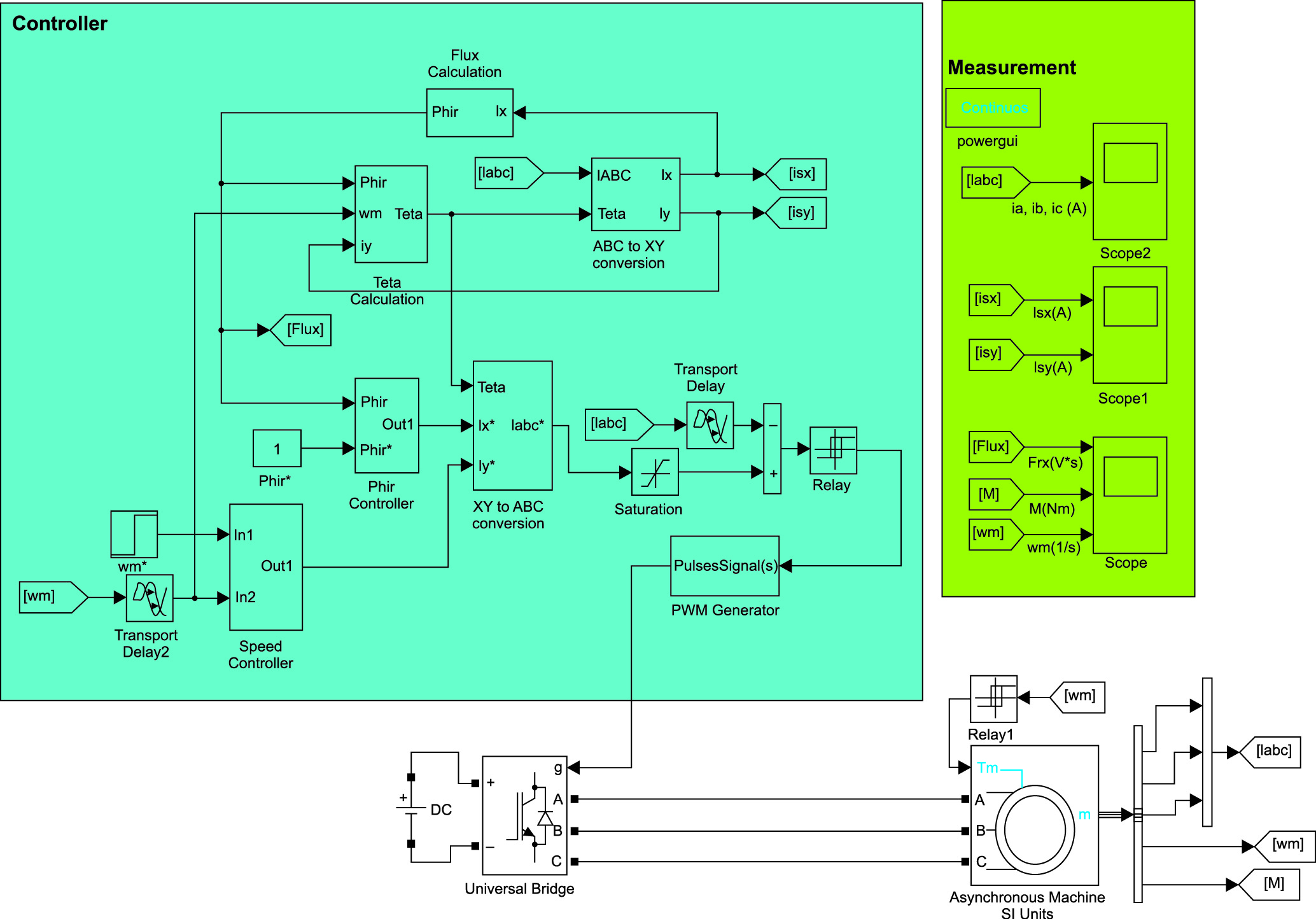
Рис. 15. Виртуальная модель асинхронного электропривода

Рис. 16. Модель блока Prip Controller

Рис. 17. Модель блока Flux Calculation

Рис. 18. Модель блока ABC to XY conversion

Рис. 19. Модель блока Teta Calculation

Рис. 20. Модель блока XY to ABC conversion
Переходные процессы по токам, потокосцеплению, моменту и скорости показаны на рис. 21. Они достаточно хорошо совпадают с результатами, полученными на математических моделях. Мгновенные токи в фазах А,В,С асинхронного двигателя показаны на рис. 22. На первоначальном участке пуска (t = 0…0,1 c), когда поток еще не достиг номинального значения, токи в фазах постоянны и ограничены заданным значением. Затем, когда поток практически постоянен, а задание по скорости равно нулю (t = 0,1…0,2 c.), токи в фазах уменьшаются за счет роста угловой скорости вращения координат wk. При подаче сигнала в канал управления скоростью наблюдается кратковременный переходный процесс по скорости с выходом на ограничение по току с переходом в установившийся режим работы.

Рис. 21. Переходные процессы в виртуальном асинхронном электроприводе

Рис. 22. Токи в фазах асинхронного двигателя при пуске и в установившемся режиме работы электропривода
Заключение
Многовариантный структурный синтез асинхронного электропривода является одной из основных процедур модельно-ориентированного проектирования (МОП) [10], носящего название «Разработка путем моделирования» («Симуляция»). Дальнейшая процедура МОП содержит несколько этапов.
На первом этапе в пакете Simulink осуществляется переоборудование непрерывной системы управления в цифровой аналог.
На втором этапе при использовании одного из пакетов расширения MATLAB Coder, Simulink Coder, Embedded Coder из цифровой модели системы управления автоматически генерируется исполняемый код (процедура «Автоматическая генерация кода»).
На третьем этапе проектирования осуществляется компиляция кода и загрузка его на целевое устройство, работающее в режиме реального времени (процедура «Непрерывное тестирование и верификация»).
Далее можно осуществить быстрое прототипирование, которое может быть реализовано на целевом компьютере с помощью xPC Target или на промышленной целевой вычислительной аппаратуре с использованием Real-Time Workshop Embedded Coder.
Все эти задачи, применительно к проектированию асинхронного электропривода, планируется описать в дальнейших уроках по моделированию в разделе «Школа MATLAB».
- Бойчук Л. М. Метод структурного синтеза нелинейных систем автоматического управления. М.: Энергия. 1971.
- Булгаков А. А. Новая теория управляемых выпрямителей. М.: Наука. 1970.
- Бродовский В. Н., Иванов Е. С. Приводы с частотно-токовым управлением. М.: Энергия. 1974.
- Герман-Галкин С. Г. Matlab–Simulink. Проектирование мехатронных систем. СПб.: Корона Век. 2008.
- Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. Пер. с нем. М.-Л.: Госэнергоиздат. 1963.
- Розанов Ю. К. Силовая электроника. М.: Издательский дом МЭИ. 2007.
- Слежановский О. В., Дацковский Л. Х., Кузнецов И. С., Лебедев Е. Д., Тарасенко Л. М. Системы подчиненного регулирования электропривода переменного тока с вентильными преобразователями. М.: Энергоатомиздат. 1983.
- Соколовский Г. Г. Электроприводы переменного тока с частотным управлением. М.: Академия. 2006.
- Popow O. S. Elementy teorii systemów — systemy dynamiczne. Politechnika Szczeсiń Wydzial Informatyki. Szczecin. 2005.
- http://chinimavto.ru/
 2 марта, 2011
2 марта, 2011 2 июня, 2016
2 июня, 2016