
Управление импульсным преобразователем методом V2
Функциональная схема управления понижающим импульсным преобразователем методом V2 представлена на рис. 1а, где силовая часть может работать как в режиме непрерывного тока (РНТ), так и в режиме прерывистого тока (РПТ) [3]; rС — эквивалентное последовательное сопротивление выходного конденсатора; резисторы Rд1, Rд2 составляют делитель выходного напряжения. Схема управления содержит транскондуктивный усилитель ошибки (УО), ШИМ-компаратор, RS-триггер, задающий генератор ЗГ, вырабатывающий последовательность тактовых импульсов uт и пилообразное напряжение uп, используемое в цепи коррекции системы управления. Название метода управления V2 вызвано наличием в схеме управления двух входов, на которые подается напряжение обратной связи Kдuвых.

Рис. 1.
а) Функциональная схема импульсного преобразователя с управлением методом V2;
б) временные диаграммы, иллюстрирующие его работу;
в) фрагмент временных диаграмм, поясняющий линеаризацию ШИМ
Выходное напряжение преобразователя определяется выражением:
uвых = uC + (iL – iн)rC, (1)
где при достаточно большой емкости выходного конденсатора пульсации напряжения uС на конденсаторе малы. Пульсации выходного напряжения uвых в этом случае намного меньше его постоянной составляющей uвых.ср. Практически вся переменная составляющая тока силового дросселя iL замыкается через выходной конденсатор, а постоянная составляющая — через нагрузку. Это утверждение может нарушаться только в переходных режимах и импульсном характере тока нагрузки iн.д.
Переменная составляющая напряжения обратной связи Kдuвых, изменяющаяся с частотой переключений f и поступающая на инвертирующий вход ШИМ-компаратора с выхода УО, ослабляется при прохождении через этот усилитель за счет его интегрирующих свойств, поскольку выходное напряжение УО определяется выражением:
uyo = Wyo(p)(Uоп – Kдuвых), (2)
где Uоп — опорное напряжение; Kд = Rд1 / (Rд1 + Rд2) — коэффициент передачи делителя цепи обратной связи по напряжению; Wуо(p) — передаточная функция УО, определяемая выражением:
Wуо(p) = gm / Скр, (3)
gm — крутизна транскондуктивного УО; Ск — емкость корректирующего конденсатора, подключаемого к выходу УО. В отличие от сказанного, на неинвертирующий вход ШИМ-компаратора переменная составляющая напряжения Kдuвых поступает без ослабления в УО и, сравниваясь с напряжением на инвертирующем входе ШИМ-компаратора, непосредственно определяет длительность включенного состояния силового транзистора t1, как показано на рис. 1б.
Пульсации выходного напряжения uвых складываются из трех составляющих: пульсации на сопротивлении rС ∆uЭПС, пульсации на емкости выходного конденсатора ∆uС и пульсации на эквивалентной последовательной индуктивности конденсатора. Пульсациями на индуктивности обычно можно пренебречь [2]. Размах пульсаций напряжения на емкости в РНТ при iн = const определяется выражением [5]:
∆uС = ∆iL / 8fC,
где ∆iL — размах пульсаций тока силового дросселя, а размах пульсаций на сопротивлении rС
∆uЭПС = rС∆iL.
Тогда найдем отношение амплитуд пульсаций:

где tС = rСС — постоянная времени выходного конденсатора. Для конкретных конденсаторов отношение (4) может изменяться в пределах 0,1–1, следовательно, по крайней мере в некоторых случаях, нельзя пренебрегать емкостными пульсациями ∆uС [2]. Тогда пульсации напряжения Kдuвых на участках роста и спада изменяются по нелинейному закону, несколько не так, как показано на рис. 1б. Причем пульсации ∆uС(t) отстают по фазе на 90° относительно ∆uЭПС(t).
Для анализа устойчивости и динамических показателей качества преобразователей постоянного напряжения (ППН) при управлении методом V2 целесообразно воспользоваться линеаризованными дискретными структурными моделями силовой части, представленными на рис. 2 [6]. Предполагается работа ППН в РНТ. На рис. 2 G(p) — операторная проводимость цепи силового дросселя, Z(p) — операторное сопротивление выходного конденсатора с учетом сопротивления нагрузки R, определяемые выражениями:

ucх = uвх(t1)+uд.пр — напряжение схемы, складывающееся из входного напряжения в момент выключения силового транзистора и прямого падения напряжения на силовом диоде uд.пр; ИЭ1 — идеальный импульсный элемент, генерирующий периодическую последовательность дельта-импульсов с площадями, равными его входному сигналу ∆t1 в момент генерации импульса. Эта последовательность отстает от тактовых моментов времени на время t1 открытого состояния силового транзистора; ИЭ2 — идеальный ключ, периодически замыкающийся на время t1, указанное под его изображением; iн.д — дополнительный ток нагрузки, учитываемый с помощью источника тока, подключенного параллельно с сопротивлением R. Символом «∆» обозначены отклонения (вариации) переменных в возмущенном режиме от кривых тех же переменных в установившемся режиме системы.

Рис. 2. Линеаризованные дискретные модели силовой части понижающего ППН в РНТ:
а) исходная;
б) преобразованная
Перемещая в схеме на рис. 2а точку приложения сигнала ∆iн.д вперед на выход и по цепи обратной связи, получаем схему, представленную на рис. 2б, где передаточная функция LC-фильтра:

tС = rСС; TС = (R+rС)C; Kф = R/(R+r) — коэффициент усиления фильтра, близкий к 1; Tф и zф — постоянная времени и коэффициент демпфирования фильтра, определяемые выражениями:

Важным этапом при обосновании структурной динамической модели импульсного ППН является линеаризация ШИМ, которая в данном случае выполняется на основании кривых на рис. 1б аналогично [6]. Предполагаем, что возмущенный режим (штриховые кривые на рис. 1б и в) мало отличается от установившегося режима (сплошные линии на рис. 1б и в). Тогда для треугольника abc на рис. 1в справедливо равенство:

откуда следует линеаризованное уравнение ШИМ:
∆t1 = КШИМ(∆uyo–Kд∆uвых), (9)
где KШИМ — коэффициент передачи ШИМ, определяемый выражением:

Производные, входящие в выражение (10), с учетом (1) и (3) определяются равенствами:

где Uп — размах пилообразного напряжения, Т=1/f.
С учетом функциональной схемы (рис. 1а), структурной модели силовой части (рис. 2б) и уравнения (9) получаем структурную динамическую модель ППН, показанную на рис. 3а. К сожалению, эта модель явно не показывает особенности управления методом V2.

Рис. 3. Линеаризованные структурные дискретные динамические модели ППН с управлением по методу V2:
а) одноконтурная;
б) двухконтурная токового контура;
в) исходная;
г) преобразованная к виду с единичной обратной связью
Подставив выражение
iн = uвых/R + iн.д
в равенство (1), получим выражение

которое показывает, что одноконтурная система с обратной связью по выходному напряжению (рис. 3а) может быть сведена к двухконтурной системе с обратными связями по напряжению на емкости выходного конденсатора uС и току силового дросселя iL. Имеющаяся в схеме на рис. 2а внутренняя обратная связь по выходному напряжению uвых с учетом выражения (12) может быть заменена на две обратные связи: по напряжению на емкости выходного конденсатора uС и по току дросселя iL.

Рис. 4. Расчетная граница области устойчивости токового контура ППН с V2-управлением, область устойчивости располагается ниже границы
С учетом схем на рис. 1а, рис. 2а и рис. 4 получаем дискретную структурную модель, представленную на рис. 3б, где Gск(p) — скорректированная с учетом сопротивления rС операторная проводимость цепи силового дросселя, определяемая как:
Поскольку ток дросселя iL изменяется значительно быстрее, чем напряжение на емкости uС и напряжение на выходе УО uуо , для упрощения рассмотренной двухконтурной системы (рис. 3б) воспользуемся методом разделения движений на быстрые и медленные. На рис. 3в представлена структурная модель быстрого контура, задающим воздействием для которого является медленно изменяющийся сигнал ∆uуо, а сигналы ∆uвх, ∆iн.д и ∆uС являются возмущающими воздействиями.
Передаточная функция непрерывной части токового контура в схеме на рис. 3в, определяемая как произведение:
Wнч.т(р) = КдКШИМuсх(R||rC)Gск(p),
представляется в стандартном виде:
где Кнч.т — коэффициент усиления контура, TLск — постоянная времени цепи дросселя с учетом ЭПС, определяемые выражениями:

Перемещая в схеме на рис. 3в точки приложения всех возмущающих воздействий вперед на вход импульсного элемента ИЭ1, а точку приложения задающего воздействия ∆uуо назад, на выход звена Gск(p), как принято в теории автоматического управления [7],
получим структурную схему, представленную на рис. 3г, где ∆t1в и ∆iLв — составляющие сигналов ∆t1(t) и ∆iL(t), вызванные возмущающими воздействиями;
∆i3 = ∆uуо / [Kд(R||rC)] — пересчитанный задающий сигнал токового контура.
Дискретная передаточная функция разомкнутого токового контура в схеме на рис. 3г с учетом выражения (15) определяется следующим образом [8, 9]:

где d = e—T/TLск; 0 ≤ e ≤ 1.
Смещенное z-преобразование сигнала на входе ИЭ1, согласно схеме на рис. 3г, определяется выражением [9]:

где e1=t1/T; ∆iз(z, e) и ∆t1B(z, e) — z-преобразования сигналов ∆iз(t) и ∆t1B(t).
Подставляя в равенство (17) e = e1 и решая получающееся при этом уравнение, найдем

Теперь равенство (17) с учетом (18) позволяет рассчитать переходный процесс ∆t1(t) при заданных законах изменения сигналов ∆tз(t) и ∆t1в(t).
Для расчета переходного процесса ∆iL(t) необходимо воспользоваться соотношением, вытекающим из схемы на рис. 3г:

где, с учетом выражения (13), имеем
Gск(z, e) = (1/L) × zde/(z—d). (20)
Для анализа устойчивости токового контура определяем корень характеристического уравнения
1 + z-1WT(z,1) = 0,
которое с учетом (16) принимает вид
z + d(Kнч.т/TLск – 1) = 0. (21)
Корень уравнения (21) с учетом выражений (16) определяется как

Для устойчивости токового контура необходимо и достаточно выполнения условия
|z1|< 1. (23)
Поскольку d < 1, то при Кнч.т/TLск< 1 условие устойчивости токового контура всегда выполняется. В случае Кнч.т/TLск > 1 условие устойчивости с учетом (22) имеет вид

На рис. 4 представлена граничная кривая, построенная по формуле

вытекающей из (24).
Условие устойчивости (24) аналогично условию, полученному ранее для упрощенного токового контура ППН [10].
В качестве примера рассматривается понижающий импульсный преобразователь с системой управления по методу V2, построенной на базе микросхемы СS5212 [4] (рис. 5). Из-за пониженного выходного напряжения силовая часть ППН выполнена на синхронном переключателе, состоящем из двух силовых МДП-транзисторов VT1 и VT2. Параллельно силовому дросселю присоединена цепь измерения тока дросселя, состоящая из резистора R2 и конденсатора C2 и используемая для реализации ограничения мгновенного значения этого тока. Конденсатор С3 и резистор R3 образуют фильтр низких частот (сглаживающий фильтр), предназначенный для подавления высокочастотных помех, создаваемых на конденсаторе С2. Конденсатор С1 и резистор R1 образуют защитную RC-цепь (снаббер) для подавления возможных коротких выбросов напряжения, возникающих при переключениях транзисторов VT1 и VT2. На резисторах R4, R5, R6 собран делитель напряжения, предназначенный для снижения напряжения, подаваемого с выхода ППН на вход усилителя ошибки (УО), до значения опорного напряжения Uоп = 1 В. Структура микросхемы представлена в нижней части рис. 5.
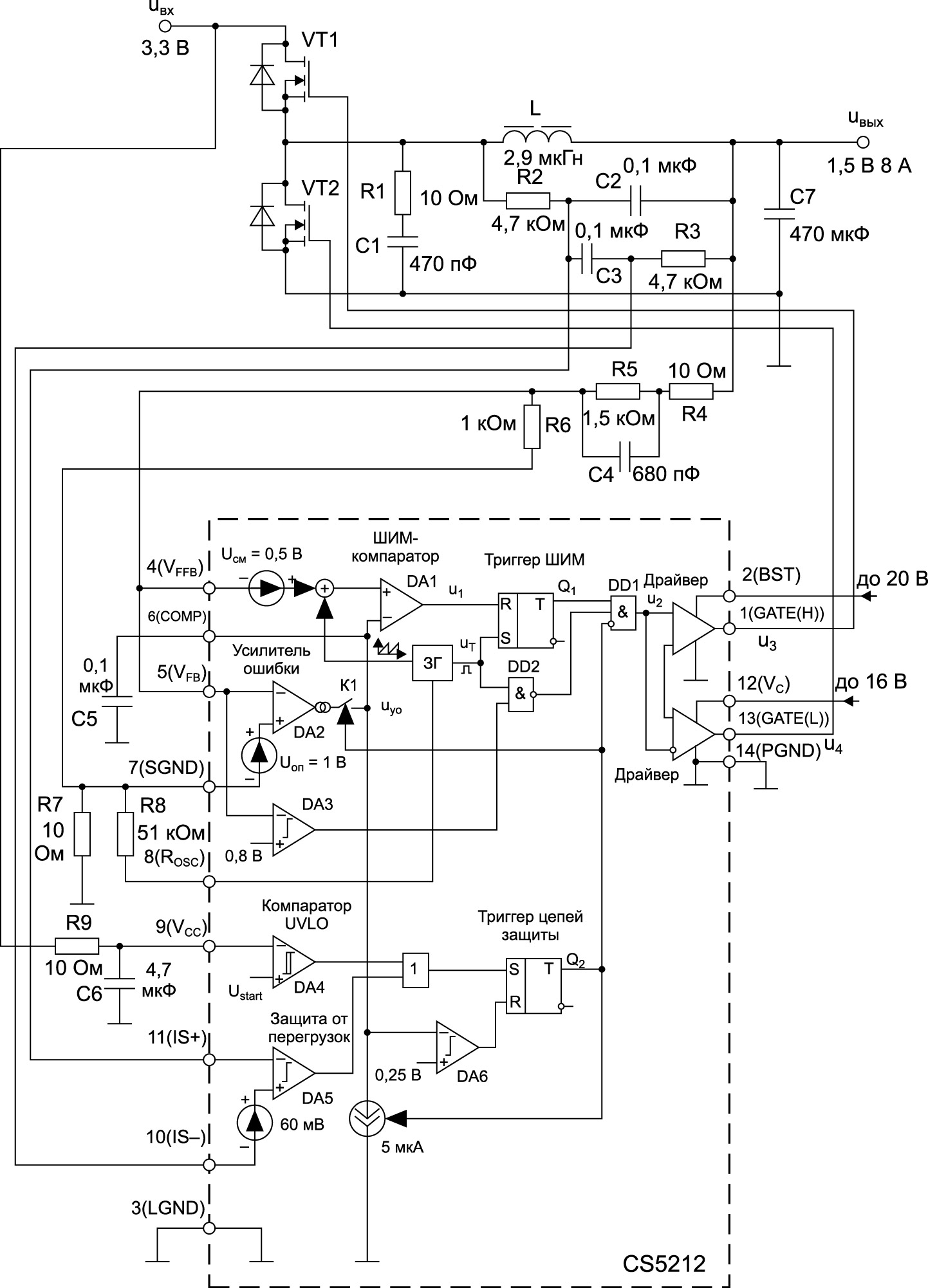
Рис. 5. Схема понижающего импульсного преобразователя с синхронным переключателем и V2-управлением
Микросхема СS5212 представляет собой контроллер для управления низковольтным понижающим импульсным ППН с синхронным переключателем. Микросхема может работать при напряжении питания, подаваемом на вывод 9(VСС), 3,1–7 В. Кроме того, на вывод 2(BST) необходимо подавать напряжение 4,5–20 В для питания драйвера, предназначенного для управления «верхним» транзистором VT1, и на вывод 12(VС) — напряжение до 16 В для питания драйвера, предназначенного для управления «нижним» транзистором VT2. На выходных выводах упомянутых драйверов 1(GATE(H)) и 13(GATE(L)) могут создаваться вытекающие и втекающие постоянные токи, не превышающие 0,2 А. Время нарастания выходного напряжения драйвера составляет 40 нс при емкости нагрузки драйвера 3,3 нФ.
В таблице приведены номера выводов микросхемы, их обозначения и назначение.
Частота задающего генератора микросхемы может устанавливаться в пределах от 150 до 750 кГц при помощи резистора, включенного между выводом 8 и землей.
|
Номера выводов |
Обозначение выводов |
Назначение выводов |
|
1 |
GATE(H) |
Выход драйвера с допустимым максимальным током до 1 А для верхнего силового транзистора. |
|
2 |
BST |
Вывод для подачи напряжения питания драйвера верхнего транзистора. |
|
3 |
LGND |
Слаботочная земля для внутренних цепей микросхемы. |
|
4 |
VFFB |
Вход ШИМ-компаратора. |
|
5 |
VFB |
Вход УО. |
|
6 |
COMP |
Выход УО, выходное напряжение которого служит опорным напряжением для ШИМ-компаратора. Между этим выводом и выводом 3(LGND) подключается конденсатор коррекции усилителя ошибки. |
|
7 |
SGND |
Вывод, через который внутренний источник опорного напряжения подключается к земле 3(LGND). |
|
8 |
ROSC |
Вывод для подключения резистора, задающего частоту переключений. |
|
9 |
VCC |
Вывод для подачи напряжения питания микросхемы. Рекомендуется подключение к этому выводу конденсатора емкостью 0,1 мкФ относительно вывода 3(LGND). |
|
10 |
IS– |
Инвертирующий вход компаратора цепи защиты от перегрузок по току. |
|
11 |
IS+ |
Неинвертирующий вход компаратора цепи защиты от перегрузок по току. |
|
12 |
VC |
Вывод для подачи напряжения питания драйвера нижнего транзистора. |
|
13 |
GATE(L) |
Выход драйвера с допустимым максимальным током до 1 А для нижнего силового транзистора. |
|
14 |
PGND |
Сильноточная земля для верхнего и нижнего драйверов верхнего и нижнего транзисторов. |
В качестве усилителя ошибки используется транскондуктивный усилитель с крутизной gm = 32 мСм. Коэффициент усиления дифференциального входного напряжения УО на низких частотах при сопротивлении нагрузки 2,5 МОм составляет 98 дБ, что вычисляется как 20lg(32×10-3 × 2,5×106) = 98 дБ. На неинвертирующий вход УО подано опорное напряжение Uоп =1 В, на инвертирующий вход — напряжение обратной связи uос = Kдuвых. При uвых = 1,5 В необходимо иметь коэффициент передачи делителя, равный:
Кд = Uоп / uвых = 1/1,5 = 0,6666.
Заметим, что напряжение обратной связи Kдuвых подается одновременно на два вывода микросхемы 4 и 5, образуя два контура обратной связи по напряжению. Отсюда и название — V2-регулирование.
Временные диаграммы, иллюстрирующие работу схемы в режиме запуска, представлены на рис. 6, где u1 — напряжение на выходе ШИМ-компаратора; uуо — напряжение на выходе УО; uт — тактовые импульсы, поступающие с выхода задающего генератора. Пульсации напряжения обратной связи uос = Kдuвых не показаны.

Рис. 6. Временные диаграммы, иллюстрирующие процесс плавного пуска системы
Как показано на рис. 6, при подаче напряжения питания на схему входное напряжение преобразователя uвх постепенно нарастает, например за счет заряда конденсатора, которым всегда шунтируются входные зажимы преобразователя.
Необходимо заметить, что поскольку микросхема, за исключением драйверов силовых транзисторов, питается непосредственно от входного напряжения uвх, запуск начинается только после нарастания напряжения uвх до значения uSTART. В начале пуска вследствие предусмотренных приоритетных состояний триггер ШИМ находится в состоянии Q1 = 0, а триггер цепей защиты — в состоянии Q2 = 1. При uвх > uSTART компаратор UVLO DA4 сбрасывается, с его выхода на логический элемент «ИЛИ» поступает логический «0». Поскольку ток силового дросселя iL отсутствует, компаратор DA5 также находится в состоянии сброса, и с его выхода на элемент «ИЛИ» поступает уровень логического «0», при этом на S-вход триггера цепей защиты также поступает логический «0». Поскольку конденсатор С5 разряжен, компаратор DA6 срабатывает, вызывая сброс триггера цепей защиты. Сигнал Q2 = 0 на его выходе разрешает прохождение сигнала Q1 при его наличии с выхода триггера ШИМ на драйвер верхнего силового транзистора VT1, если на выходе логического элемента «И-НЕ» DD2 имеется сигнал «1». Последнее имеет место, когда хотя бы на одном входе DD2 действует сигнал логического «0», т. е. либо на интервале времени, когда отсутствует тактовый импульс uт, либо когда напряжение обратной связи uос = Kдuвых превысит 0,8 В, либо — и то, и другое.
Пока Q2 = 0, ключ К1 замкнут, источник тока 5 мкА отключен от вывода 6. Пока напряжение обратной связи Kдuвых на выводе 5 меньше Uоп = 1 В, УО находится в состоянии ограничения с максимально возможным вытекающим выходным током IвыхУО = 30 мкА. Этим током заряжается конденсатор С5 емкостью 0,1 мкФ, подключенный извне к выводу 6. Время плавного пуска определяется по формуле:
tп = С5 × uУ/IвыхУО,
где: IвыхУО = 30 мкА; uУО = 1 В — напряжение на выходе УО, при котором система управления начинает работать в режиме стабилизации выходного напряжения ППН; C5 — емкость конденсатора С5.
Когда в процессе пуска напряжение на выводе 6 превысит значение 0,25 В, происходит сброс компаратора DA6, и снимается сигнал «1» с R-входа триггера цепей защиты, подготавливая его к срабатыванию.
При снижении напряжения питания микросхемы ниже допустимого уровня uSTART срабатывает компаратор UVLO DA4, сигнал u1 = 1 с выхода компаратора поступает на S-вход триггера цепей защиты, а сигнал Q2 = 1 с выхода этого триггера запрещает прохождение импульсов с выхода триггера ШИМ на драйверы, вызывая размыкание ключа К1 и активизацию источника тока 5 мкА, который разряжает конденсатор С5. Аналогично происходит прекращение переключений в системе при возникновении перегрузки по току, когда срабатывает компаратор DA5.
Когда в процессе пуска напряжение на выводе 6 превысит значение 0,5 В, происходит сброс ШИМ-компаратора, снимается сигнал u1 = 1 с R-входа триггера ШИМ, который тем самым подготавливается к переключению в состояние Q1 = 1. При поступлении на его S-вход очередного тактового импульса uт от ЗГ триггер ШИМ срабатывает, и его выходной импульс Q1 проходит через логический элемент «И» DD1 на драйвер верхнего силового транзистора VT1, если на выходе триггера цепей защиты присутствует сигнал Q2 = 0. Логический элемент «И–НЕ» DD2 запрещает прохождение импульса Q1 через элемент «И» DD1 во время действия тактового импульса uт, пока напряжение на выводе 5 меньше 0,8 В, из-за чего на выходе компаратора DA3 действует сигнал «1».
При включении силового транзистора VT1 начинается возрастание тока силового дросселя iL и соответственно увеличение мгновенного значения выходного напряжения преобразователя:
uвых = uC–(iL–iн)rC,
где uC — напряжение на емкости выходного конденсатора, iн — ток нагрузки ППН, rC — эквивалентное последовательное сопротивление (ЭПС) выходного конденсатора. Начинает возрастать напряжение обратной связи Kдuвых на выводах 4 и 5, возрастает также напряжение на неинвертирующем входе ШИМ-компаратора и, когда его мгновенное значение сравняется с выходным напряжением УО, ШИМ-компаратор снова срабатывает, положительный перепад напряжения на его выходе вызывает сброс триггера ШИМ. При этом импульс u3 на выходе 1(GATE(H)) драйвера верхнего транзистора VT1 исчезает, что вызывает запирание силового транзистора VT1. С небольшой задержкой после прекращения импульса на выходе 1 появляется импульс u4 на выходе 13, который отпирает нижний силовой транзистор VT2. Ток силового дросселя iL и напряжение uвых начинают убывать, что вызывает сброс ШИМ-компаратора, снятие сигнала u1 = 1 с R-входа триггера ШИМ. Триггер ШИМ оказывается подготовленным к повторному срабатыванию, что происходит при поступлении очередного тактового импульса.
Таким образом, происходит периодическое переключение силовых транзисторов VT1 и VT2. Амплитудные значения тока дросселя и выходное напряжение ППН возрастают от периода к периоду, соответственно увеличиваются их средние за период Т значения. Пока напряжение обратной связи uос = Kдuвых, подаваемое на вывод 5, меньше опорного напряжения Uоп = 1 В, УО остается в состоянии ограничения выходного сигнала с вытекающим выходным током IвыхУО = 30 мкА, регулирование выходного напряжения преобразователя uвых не происходит, хотя имеет место периодическое (с периодом Т) сравнение сигналов на входах ШИМ-компаратора DA1 и его периодическое переключение. Когда напряжение uос превысит значение 0,8 В, как показано на рис. 1, компаратор DA3 сбрасывается, на одном из входов логического элемента DD2 начинает постоянно действовать логический «0», а с его выхода на один из входов логического элемента DD1 постоянно подается логическая «1», в то время как до этого момента логическая «1» поступала также непрерывно, но за исключением интервалов действия тактовых импульсов uт. Таким образом, до указанного момента запрещалось отпирание силового транзистора VT1 на интервалах действия тактовых импульсов.
Процесс пуска завершается, когда амплитудные значения напряжения обратной связи на выводе 5, обусловленные пульсациями тока силового дросселя, начинают превышать опорное напряжение Uоп = 1 В настолько, что УО выходит из состояния ограничения выходного сигнала и далее остается в активном режиме.
При достижении напряжением обратной связи uос = Kдuвых значения 1 В напряжение на неинвертирующем входе ШИМ-компаратора DA1 достигает значения Kдuвых+Uсм = 1,5 В; примерно таких значений периодически достигает и напряжение uУО, подаваемое на его инвертирующий вход.

Рис. 7. Временные диаграммы, иллюстрирующие работу схемы в режиме стабилизации выходного напряжения ППН
На рис. 7 представлены временные диаграммы, иллюстрирующие работу схемы в режиме стабилизации выходного напряжения преобразователя. В момент формирования тактового импульса uт триггер ШИМ срабатывает, но сигнал Q1 = 1 проходит через логический элемент DD1 на вход драйвера верхнего силового транзистора VT1 только после окончания импульса uт, когда на один из входов логического элемента DD1 поступает разрешающий сигнал с выхода DD2. Срабатывание ШИМ-компаратора, формирование импульса u1, вызывающего сброс триггера ШИМ и последующее запирание силового транзистора VT1, происходит в момент выполнения условия для определения времени включенного состояния силового транзистора:
Kдuвых(t1)+Uсм+uп(t1) = uУО(t1),
которое можно переписать так:
Kдuвых(t1)+Uсм = uУО(t1)–uп(t1),
что соответствует кривым, показанным на рис. 7.
- I-Chieh Wei, Dan Chen, Yu-Cheng Lin, Ching-Jan Chen. The Stability Modeling of Ripple-Based Constant On-time Control Schemes Used in the Converters Operating in DCM // International Conference on Renewable Energy Research and Applications (ICRERA). 2012.
- Song Qu. Modeling and Design Considerations of V2 Controlled Buck Regulator // 16 Annual IEEE Applied Power Electronics Conference and Exposition. APEC 2001.
- Guohua Zhou, Jianping Xu, Yangan Jin, Jin Sha. Stability analysis of V2 Сontrolled Buck Converter Operating in CCM and DCM // Communications, Circuits and System (ICCCAS), 2010 International Conference on Date Conference. 28–30 July 2010.
- Low Voltage Synchronous Buck Controller Semicondutor Components Industries, LLC, 2006. Publication Order Number: CS5212/D. July, 2006. Rev. 4. http:// onsemi.com.
- Белов Г. А. Динамика импульсных преобразователей. Чебоксары: Изд-во Чуваш. гос. ун-та. 2001.
- Белов Г.А. Линеаризованные дискретные структурные динамические модели импульсных ППН при модуляции момента выключения транзистора // Силовая электроника. 2014. №4.
- Попов Е. П. Теория линейных систем автоматического регулирования и управления: учеб. пособие для ВТУЗов, 2-е изд., перераб. и доп. М.: Наука. 1989.
- Бесекерский В. А. Цифровые автоматические системы. М.: Наука. 1976.
- Белов Г. А. Теория автоматического управления. Дискретные и нелинейные системы автоматического управления: учеб. пособие. Чебоксары: Изд-во Чуваш. гос. ун-та. 2009.
- Белов Г. А. Анализ и моделирование импульсных преобразователей с упрощенным токовым контуром // Электричество. 2011. № 8.
 4 апреля, 2020
4 апреля, 2020