
Учет влияния внутреннего сопротивления источника напряжения переменного тока на работу импульсного стабилизатора переменного напряжения
Введение
Импульсный стабилизатор напряжения переменного тока (СН~Т) представляет собой дискретную нелинейную систему. Исследования СН~Т проводятся обычно при допущении о нулевом внутреннем сопротивлении источника стабилизируемого напряжения [1]. При соизмеримой мощности нагрузки СН~Т и источника питания пренебрегать его внутренним сопротивлением уже нельзя. Поэтому необходим анализ его влияния на работу и свойства СН~Т.
Предельная непрерывная модель СН~Т
Анализ свойств СН~Т с учетом дискретного характера процессов представляет собой практически неразрешимую в настоящее время математическую задачу. Учитывая высокую по сравнению с частотой f стабилизируемого напряжения частоту F коммутации ключей СН~Т (F>>>f), без больших ошибок можно рассматривать предельную непрерывную модель СН~Т, представляющего собой систему с периодическим высокочастотным изменением структуры [2].
На рис. 1 представлена расчетная схема силовой части СН~Т, построенного на основе понижающего импульсного преобразователя напряжения (ИПН).

Рис. 1. Расчетная схема силовой части СН~Т
На схеме (рис.1) обозначены: e, R, L — ЭДС, активная и индуктивная составляющая выходного сопротивления источника переменного напряжения; r, l, C — активное сопротивление, индуктивность и емкость сглаживающего фильтра; RH и LH — активное сопротивление и индуктивность нагрузки; К — идеализированная модель транзисторного ключа, переключающегося с частотой F = 1/T из положения «1» в положение «2», внутреннее сопротивление которого включено в r; C1 — защитный конденсатор, снимающий перенапряжения на ключе К.
При двух положениях ключа К («1» и «2») схема описывается двумя системами пяти линейных дифференциальных уравнений (1) и (2) соответственно:


В векторно-матричной форме системы уравнений (1 и 2) записываются в виде:


где XT = [uH, UC1,iÈ,iÄ,iH], hT = [0,0,1/L,0,0], Т — знак транспортирования;


Напряжение на нагрузке определяется уравнением:
uH = cTX, cT = [1,0,0,0,0]. (3)
Предельная непрерывная модель силовой части СН~Т согласно [2] описывается уравнением:

где

или системой линейных дифференциальных уравнений:

При γ = const и e = Emsin(W t) система (5) имеет стационарное гармоническое решение. Переходя к комплексным амплитудам:
Ėm = Em, U.Hm = UHmejφH в системе уравнений (5), получаем:

где
![]()
Для определения амплитуд комплексных координат значительно проще решить систему уравнений (6), чем перейти к комплексным амплитудам в векторно-матричном уравнении (4) и решать его, обращая 5×5 квадратную матрицу.
Решение системы (6) дает:

где

Согласно выражению (7), при γ = const предельная непрерывная модель силовой части СН~Т представляет собой в установившемся режиме управляемый источник напряжения с ЭДС Ėϒm = γZC1/zÈ + zC1 Ėm и переменным внутренним сопротивлением zâi = γ2zHC1.
Эквивалентная схема ее представлена на рис. 2.

Рис. 2. Эквивалентная схема силовой части СН~Т
Согласно выражению (7) и схеме (рис. 2), наличие внутреннего сопротивления у источника переменного напряжения делает предельную непрерывную модель силовой части СН~Т нелинейной, поскольку выходное сопротивление управляемого источника напряжения возрастает с увеличением регулируемого параметра γ. Статическая характеристика управляемого источника напряжения:

Исследуя S(γ) = x/[(a + xb)2 + (d + xf)2], x = γ2 на экстремум по γ2, получаем:
![]()
Если x2Y< 1, то статическая характеристика (8) имеет при γÝ = 4√x2Ý < 1 максимум. В этом случае при γY< γ< 1 статическая характеристика имеет падающий участок, «неустойчивый» в том смысле, что увеличение γ приводит к уменьшению амплитуды выходного напряжения UHm.
Если ЭДС е источника питания синусоидальная, то при достаточной ее амплитуде Еm можно выбрать постоянное значение γ, обеспечивающее заданную амплитуду синусоидального напряжения на нагрузке UHm.
В случае изменения величины синусоидальной ЭДС источника питания e(t) с помощью интегрального регулятора, контролирующего амплитуду выходного напряжения, можно получить новое значение γ, обеспечивающее заданную величину напряжения на нагрузке [3]. Заметим, что его фаза относительно e(t) изменится.
При кратковременных скачках и провалах входного напряжения и отклонениях его формы от синусоидальной необходим контроль мгновенных значений выходного напряжения uн(t). Возникает вопрос, возможно ли получение достаточно малых отклонений мгновенных значений выходного напряжения uн(t) от заданных его значений uз(t) путем управления величиной γ.
Естественно управлять величиной γ в зависимости от разности абсолютных значений: |uнз(t)| – |uн(t)| [4]. Однако при таком управлении изменение мгновенных значений uн(t) отстает от изменения γ. Это может вызвать неустойчивость замкнутого контура управления при высоких значениях коэффициента усиления регулятора, необходимых для достижения заданной точности стабилизации величины и формы выходного напряжения.
При контроле входного напряжения сглаживающего LC-фильтра uф(t), равного γuС1(t), инерционность замкнутого контура управления уменьшается, что, как будет показано ниже, позволяет получить более высокую точность стабилизации. Поскольку напряжение на нагрузке в этом случае не контролируется, оно совпадает с заданным напряжением только при единственной нагрузке, для которой определено заданное входное напряжение LC-фильтра uфз(t). Сглаживающий LC-фильтр, не охваченный стабилизирующей отрицательной обратной связью, увеличивает выходное сопротивление стабилизатора. Однако при достаточно высокой частоте коммутации выходное сопротивление LC-фильтра может оказаться небольшим.
С учетом уравнения интегрального регулятора, предельная непрерывная модель стабилизатора напряжения описывается системой из шести дифференциальных уравнений, первые пять из которых представлены выражением (5), а последнее уравнение регулятора имеет вид:
![]()
при контроле выходного напряжения и

при контроле входного напряжения фильтра, где uНЗ (t) = UHmsin(w t+φ), uФЗ(t) = UФmsin(w t+Ψ) — заданные напряжения на нагрузке и на входе фильтра соответственно.
Значения амплитуды Uфm и начальных фаз φ и Ψ относительно номинальной ЭДС источника питания e(t)=E0msin(w t) определяются из системы уравнений относительно комплексных амплитуд (6). Предварительно, используя относительную статическую характеристику импульсного преобразователя q=Uн/E=f(γ), следует по заданным пределам изменения E (Emin< E< E max) и по заданному действующему значению напряжения на нагрузке Uн определить пределы изменения управляющего параметра γ: γmin< γ< γmax. Очевидно: γmin = f –1(Uн/Emax), γmax = f –1(Uн/Emin), где f –1 — обратная функция. В случае немонотонной статической характеристики следует выбрать γmin и γmax на возрастающей, то есть устойчивой ее части. Вычислив γ0 =(γmin+ + γmax)/2, по формуле (8) определяем E0m. Начальная фаза uнз(t) φ вычисляется по выражению:

Определив из системы уравнений (6)

находим:

Стационарный режим, соответствующий γ = γ0 = const, e(t) = E0msin(w t), uHЗ(t) = uH(t) = = UHmsin(w t+φ), возможен при интегральном регуляторе напряжения на нагрузке (10).
При тех же условиях и выборе амплитуды и фазы uФЗ(t) по выражениям (14), этот же стационарный режим возможен при интегральном регуляторе напряжения на входе фильтра (11).
Оценка устойчивости стационарного режима стабилизатора
Для оценки устойчивости стационарного режима получены линеаризованные дифференциальные уравнения возмущенного движения для рассматриваемых регуляторов. Для регулятора (10):

где δuH, δuC1, δiE, δiA, δiI, δγ — отклонения от стационарного режима (возмущения).
Линеаризованное дифференциальное уравнение возмущенного движения при регуляторе (11) отличается только последним уравнением:

Коэффициенты линейных систем (15) и (16) — постоянные или непрерывные функции времени, исключая коэффициент последнего уравнения системы, представляющий собой функцию знака (sign), имеющую разрыв непрерывности первого рода. Поэтому, согласно [5, 6], обе системы удовлетворяют условию существования и единственности решения, как и в классическом случае непрерывности коэффициентов [7].
Асимптотическая устойчивость тривиального решения линеаризованной системы дифференциальных уравнений возмущенного движения (15) или (16) гарантирует асимптотическую устойчивость невозмущенного стационарного режима [7] и позволяет надеяться на устойчивость стационарных режимов, возникающих при допустимых отклонениях входного напряжения по величине и форме. Система линеаризованных дифференциальных уравнений возмущенного движения имеет периодические коэффициенты, период которых равен периоду входного напряжения. Для асимптотической устойчивости тривиального решения необходимо и достаточно с точностью до критического случая, чтобы модули характеристических чисел основной матрицы были бы строго меньше единицы [7]. Поскольку общих методов аналитического определения основной матрицы нет, можно, решая линеаризованные уравнения на ЭВМ, например в системе MATLAB+Simulink, оценить устойчивость тривиального решения экспериментально. С помощью ЭВМ можно определить основную матрицу численным методом.
Решая численным методом на ЭВМ однородную систему (δe = 0) линеаризованных уравнений возмущенного движения при шести различных начальных условиях

получаем для t = T = 1/f столбцы фундаментальной матрицы системы уравнений (15) или (16)
![]()
Учитывая, что
![]()
и известное [7] свойство фундаментальной матрицы системы с периодическими коэффициентами Ф(Т) = Ф(0)N, получаем основную матрицу системы:
![]()
Определив набольшее по модулю собственное значение матрицы С l, из условия |l|n = 0,05 можно приближенно оценить время затухания свободной составляющей переходного процесса tп по формуле tп = nT, где n = –lg20/lg(|l|).
Исследование основных эксплуатационных свойств СН~Т наиболее удобно провести методом математического моделирования в одной из известных систем, например в системе MATLAB+Simulink.
Исследование стабилизатора методом математического моделирования
В качестве примера рассмотрим СН~Т со следующими параметрами: R = 0,3 Ом, L = 0,001 Гн — активная составляющая и индуктивность выходного сопротивления источника переменного напряжения; r = 0,07744 Ом, l = 0,0033 Гн, C = 233 мкФ — активное сопротивление, индуктивность и емкость сглаживающего фильтра; RH = 15,488 Ом и w LH = 11,617 Ом — активное и индуктивное сопротивления нагрузки (PH = 2 кВт, cosφ = 0,8 при UH = 220 В, f = 50 Гц), C1 = 50 мкФ. (Параметры нагрузки и сглаживающего фильтра заимствованы из [4].)
Согласно формуле (8) построена относительная статическая характеристика силовой части стабилизатора при синусоидальном стабилизируемом напряжении (рис. 1), представленная на рис. 3. Учтя q(1) = 1,0453, находим минимально допустимую синусоидальную ЭДС источника напряжения: 220/q(1) = 210,5 В. Максимальное входное напряжение стабилизатора ограничивается допустимой величиной для силовой части и особенностями источника питания.

Рис. 3. Статическая характеристика (относительная) силовой части
Допустимые нелинейные искажения, компенсируемые стабилизатором с заданной точностью, и реакцию на кратковременные провалы и подъемы напряжения можно определить методом моделирования.
На рис. 4 и 5 в системе MATLAB 6,5+Simulink 5 представлены математические модели стабилизатора: построенная по системе уравнений (5), (10) и математическая модель линеаризованного возмущенного движения (15). По выбранному значению γ0 = 0,7 и UН ном = 220 В из системы уравнений (6) определены токи и напряжения эквивалентной схемы (рис. 2) в стационарном режиме, необходимые для построения математической модели возмущенного движения:
e0(t) = √2 × 300,50..cos(100pt), i0Д(t) = √2 × 12,994..cos(100pt+0,404073008..),
u0H(t) = uHЗ(t) = √2 × × 220cos(100pt–0,065903..), u0C1(t) = √2 × 301,78..cos(100pt–0,0178883..),
i0И(t) = 12,807..cos(100pt+1,0050..), iH(t) = √2 × 11,3636..cos(100pt–0,70940..).

Рис. 4. Математическая модель стабилизатора с управлением по отклонению мгновенных значений выходного напряжения от заданных
Математическая модель (рис. 4) позволяет наблюдать отклонения от стационарного режима, вызываемые возмущениями δUH(0), δUC1(0), δiE(0), δiA(0), δiI(0), δγ(0) и δe(t), т. е. решение уравнения возмущенного движения. Сравнение с решением линеаризованного уравнения по модели (рис. 5) позволяет оценить влияние нелинейностей системы стабилизации.
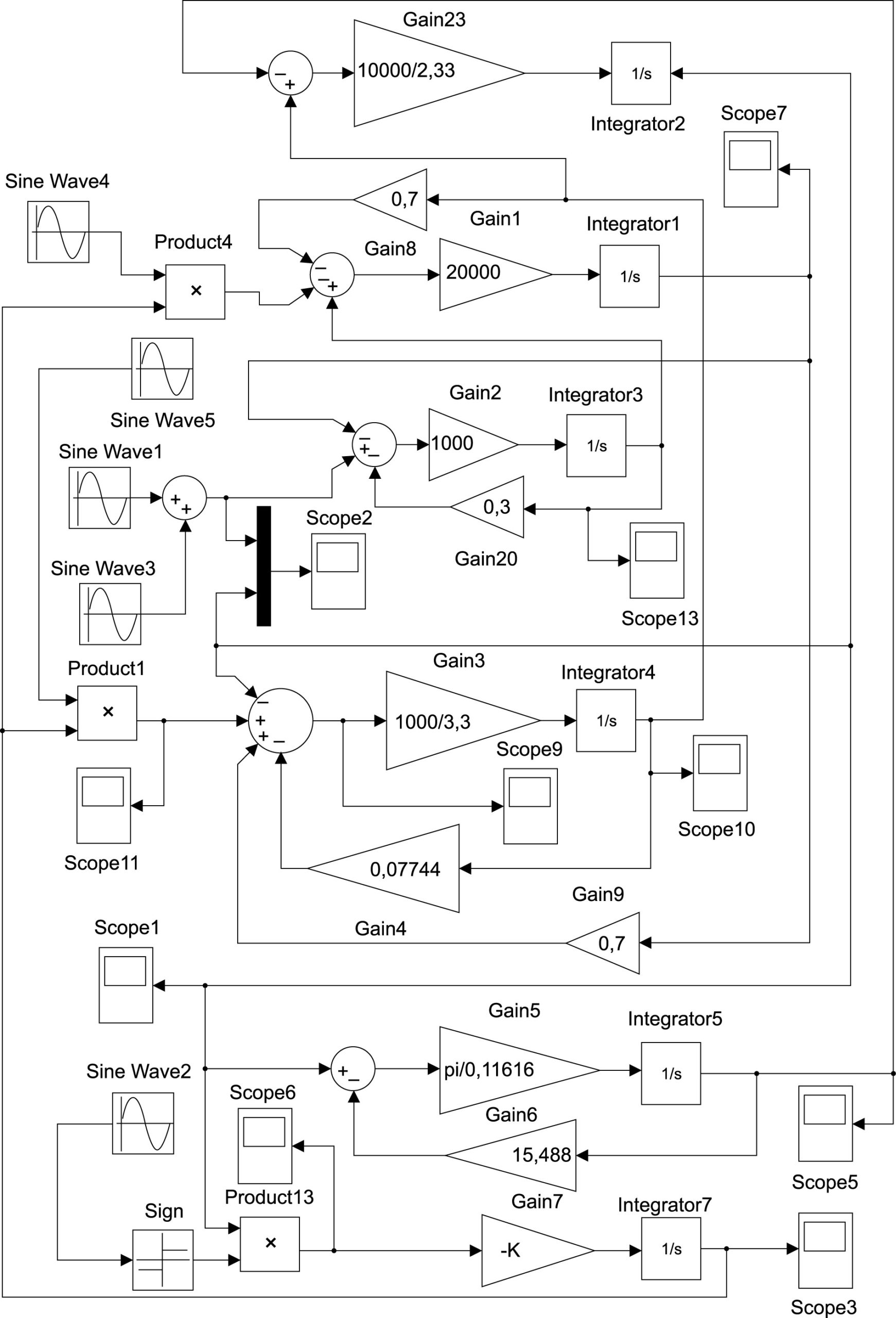
Рис. 5. Линеаризованная модель стабилизатора для отклонений от стационарного режима
По линеаризованной модели возмущенного движения подобран экспериментально критический коэффициент интегрального регулятора k = 0,3396, соответствующий незатухающему свободному процессу. Интегрирование производилось методом ode 23 (при максимальном размере 1е-6 относительная 1е-7).
Выбрав минимальный двукратный запас устойчивости (k =,17), по модели (рис. 4) при δe(t) = √2 × 10cos(100pt) получаем установившуюся ошибку стабилизации, представляющую собой периодическое с частотой w = 100p с-1 и амплитудой 0,2704 В напряжение, существенно отличающееся от гармонического. При δe(t) = √2 × 10cos(300pt) установившаяся ошибка стабилизации представляет собой почти гармоническое напряжение с частотой w = 300p с-1 и амплитудой более 34 В. Это говорит о непригодности такого варианта построения стабилизации для исправления формы напряжения. На линеаризованной модели (рис. 5) получены соответственно амплитуде ошибки: 0,283 и 46 В. Во втором случае ошибка стабилизации, кроме третьей гармоники, имеет еще и существенную первую гармонику, вызывающую увеличение амплитуды ошибки на 12 В.

Рис. 6. Математическая модель стабилизатора с управлением по отклонению мгновенных значений входного напряжения фильтра от заданных
На рис. 6 и 7 представлены математические модели стабилизатора: построенная по системе уравнений (5), (11) и математическая модель линеаризованного возмущенного движения (16) для того же стационарного режима, соответствующего γ0 = 0,7 и UН ном = 220 В.

Рис. 7. Линеаризованная модель стабилизатора для отклонений от стационарного режима
Экспериментально по модели (рис. 7) определен критический коэффициент интегрального регулятора k = 419,5. Для половинного коэффициента k=419,5/2~209 по модели (рис. 6) при δe(t) = √2 × 10cos(100pt) определена установившаяся ошибка стабилизатора δuн(t), представленная на рис. 8. По линеаризованной модели возмущенного движения (рис. 7) получена такая же по форме ошибка, но с амплитудой, чуть большей 0,2 В.

Рис. 8. Установившаяся ошибка стабилизатора при увеличении амплитуды входного напряжения
При δe(t) = √2× 10cos(300pt) установившаяся ошибка имеет амплитудное значение 0,9 В (рис. 9). Таким образом, амплитуда отклонений формы от синусоидальной уменьшилась в √2 × 10/0,9 ≈17 раз, что можно считать приемлемым результатом.

Рис. 9. Установившаяся ошибка стабилизатора, вызванная третьей гармоникой входного напряжения
Амплитуда ошибки, определенная по линеаризованной модели возмущенного движения (рис. 7), имеет несколько меньшую амплитуду (0,82 В) при той же форме.
Выводы
- При проектировании стабилизатора напряжения переменного тока, улучшающего форму стабилизируемого напряжения, необходимо учитывать влияние выходного сопротивления источника питания.
- Управление по отклонению мгновенных значений напряжения на нагрузке от заданных его значений не позволяет улучшить форму выходного напряжения вследствие ограничения коэффициента преобразования интегрального регулятора. Причина этого в увеличении инерционности замкнутого контура управления, вызываемого выходным активно-индуктивным сопротивлением генератора напряжения, что требует снижения коэффициента преобразования регулятора для обеспечения устойчивости замкнутого контура управления.
- Добиться существенного улучшения формы напряжения удается за счет исключения сглаживающего LC-фильтра из замкнутого контура стабилизации, что снижает его инерционность и позволяет значительно повысить коэффициент преобразования регулятора.
- Сглаживающий LC-фильтр, не охваченный стабилизирующей отрицательной обратной связью, увеличивает выходное сопротивление стабилизатора, вследствие чего получить точное заданное выходное напряжение можно только для расчетного сопротивления нагрузки.
- Коршунов А. И. Стабилизация напряжения переменного тока // Электротехника. 2016. № 4.
- Коршунов А. И. Предельная непрерывная модель системы с высокочастотным периодическим изменением структуры // Известия вузов. Приборостроение. 2009. № 9.
- Авт. свид. РФ № 2246127. Коршунов А. И. Импульсный стабилизатор переменного напряжения.
- Коршунов А. И. Исследование стабилизации напряжения переменного тока с помощью понижающего импульсного преобразователя // Силовая электроника. 2015. № 4.
- Заде Л., Дезоер Ч. Терия линейных систем. Метод пространства состояний. М: Наука, 1970.
- Коддингтон Э. А., Левинсон Н. Теория обыкновенных дифференциальных уравнений. М: ИЛ, 1958.
- Понтрягин Л. С. Обыкновенные дифференциальные уравнения. М: Наука, 1965.
 21 марта, 2021
21 марта, 2021 28 января, 2020
28 января, 2020