
Плавное регулирование параметров электрических цепей. Регулирование индуктивности
Введение
Как известно [1], параметрическое управление обладает определенными достоинствами, делающими его в некоторых случаях предпочтительнее сигнального управления. Параметрическое управление нашло широкое применение в радиотехнических и электротехнических устройствах, а также в силовой электронике [2, 3, 4]. При параметрическом управлении желательно именно плавное регулирование параметров. В радиотехнических устройствах, например в параметрических усилителях — плавное регулирование емкости конденсатора, что представляет собой полупроводниковый переход, смещенный в обратном направлении, осуществляющийся регулированием напряжения смещения [2]. В электротехнике регулирование емкости возбуждающих конденсаторов асинхронного генератора используется, в частности, для регулирования его выходного напряжения [3]. Поскольку здесь частоты генерируемых напряжений на много порядков ниже, чем в радиотехнике, емкость полупроводникового перехода оказывается ничтожно малой по сравнению с необходимой емкостью. Поэтому в таких случаях используются нелинейные конденсаторы (вариконды). Их емкость изменяется в зависимости от приложенного напряжения благодаря особым свойствам диэлектрика.
В электротехнике широко применяются импульсные методы регулирования не только значений токов и напряжения, но и их частоты. В последнее время, благодаря успехам в силовой электронике и микропроцессорной технике, импульсные методы регулирования стали применяться уже в таких устройствах, мощность которых достигает десятков мегаватт.
Это наводит на мысль об импульсном регулировании параметров элементов электрических цепей. Существует возможность «импульсного» регулирования сопротивления резисторов [4] и емкости конденсаторов [5].
«Импульсное» регулирование сопротивления резистора состоит в периодическом замыкании и размыкании контакта, шунтирующего резистор. При высокой частоте переключений в цепи, содержащей последовательно включенный дроссель, коммутируемый резистор обладает эквивалентным сопротивлением, равным произведению его номинального сопротивления на относительную длительность части периода коммутации, соответствующей разомкнутому контакту [4]. Это позволяет плавно регулировать сопротивление резистора от нуля до номинального значения.
Идея импульсного регулирования емкости конденсатора состоит в периодическом подключении параллельно к нему еще одного конденсатора [5]. Во время отключения второго конденсатора при условии поддержания на нем напряжения, равного напряжению на основном конденсаторе, эквивалентную емкость конденсаторов можно плавно изменять от емкости основного конденсатора С1 до суммарной емкости двух конденсаторов С1 + С2. Для этого достаточно одного — плавно изменять относительную длительность части периода коммутации, соответствующей параллельному подключению второго конденсатора.
Очевидно, согласно известному в электротехнике принципу дуальности, возможно осуществлять и «импульсное» регулирование индуктивности катушки индуктивности. В данной статье рассмотрены особенности «импульсного» способа регулирования индуктивности катушки индуктивности.
Идея регулирования индуктивности катушки индуктивности
Рассмотрим две последовательно соединенные катушки индуктивности с индуктивностями L1 и L2 соответственно. Вторая из них периодически отключается и подключается к устройству, обеспечивающему поддержание тока i2 в отключенной индуктивности L2 равным току i1 в индуктивности L1. В течение первой части периода переключений T длительностью t ключ К1 находится в положении «1», а ключ К2 разомкнут, как показано на рис. 1а. В оставшейся части периода длительностью T – t ключ К1 находится в положении «2», а ключ К2 замкнут. К c d подключен управляемый источник напряжения, обеспечивающий равенство i2 = i1.

Рис. 1. Принцип плавного регулирования индуктивности:
а — принципиальная схема,
б — временная диаграмма изменения тока
Положим вначале ключи К1, К2 и катушки индуктивности идеальными, а на зажимах a, b напряжение uab = const. В течение первой части периода nT< t< nT+t (n — натуральное число) ток i1 изменяется по линейному закону

а в оставшейся части периода nT + t< t< (n+1)T — по другому линейному закону:

Очевидно, ток i1 между зажимами a, b изменяется по закону ломаной линии с чередующимися прямолинейными отрезками, как показано на рис. 1б. Наклон на первом участке периода переключения равен 1/(L1+L2), а на втором — наклон больше, он составляет 1/L1.
При уменьшении периода переключений T ломаная линия на рис. 1б все меньше отличается от прямой, имеющей наклон, равный средней скорости изменения тока i1:

где

Очевидно, что прямолинейный закон изменения тока i1 между зажимами a, b, к которому неограниченно приближается при T → ∞ реальный закон изменения тока, получается при одной эквивалентной катушке индуктивности с индуктивностью LЭКВ (3).
Таким образом, в идеальном случае при достаточно высокой частоте коммутации ключей К1, К2 можно плавно регулировать индуктивность между зажимами a, b, изменяя относительную длительность подключения катушки с индуктивностью L2, равную γ = τ/T. Следовательно, при изменении t от 0 до Т, а γ = τ/T от 0 до 1 значение LЭКВ будет изменяться в пределах от L1 до L1 +L2. Чем больше первая часть периода, равная t, в течение которой вторая катушка индуктивности подключена последовательно с первой катушкой, тем больше величина эквивалентной индуктивности LЭКВ.
Рассмотренная идея плавного регулирования индуктивности имеет один существенный недостаток, усложняющий ее реализацию, — необходимость поддерживать ток в отключенной второй катушке с индуктивностью L2 равным току в основной катушке индуктивности L1, для того чтобы исключить недопустимые перенапряжения на ключе К1 в момент их последовательного соединения.
Однако, учитывая высокую частоту коммутации (T→∞), можно считать, что за время T – t ток i1 в цепи первой (основной) катушки индуктивности изменится незначительно, а ток i2 во второй катушке, замкнутой в этой части периода накоротко, практически не изменится. Учитывая малую разницу токов i1 – i2 и большое, но конечное сопротивление разомкнутого ключа К2, можно получить вполне допустимое напряжение на закрытом К2. Однако, как показано ниже, регулирование эквивалентной индуктивности оказывается невозможным. Для доказательства этого удобнее всего применять предельную непрерывную модель схемы [6]. Этот же подход использован и в работах [4, 5].
Анализ упрощенной схемы плавного регулирования индуктивности
Рассмотрим вначале идеальный случай, когда ключи К обладают нулевым сопротивлением (r = 0) в замкнутом состоянии и конечным сопротивлением (R<∞) в разомкнутом состоянии. Кроме того, положим, что отсутствует устройство, не показанное на рис. 1а, поддерживающее при замкнутом ключе К2 ток i2 в индуктивности L2 равным току в индуктивности L1.
На временном интервале nT< t< nT+t эквивалентная схема, представленная на рис. 2а, описывается системой уравнений


Рис. 2. Эквивалентные схемы:
а — для первой части периода переключений,
б — для второй части,
в — предельная непрерывная модель
а на временном интервале nT + t< t< (n+1)T эквивалентная схема, представленная на рис. 2б, описывается системой уравнений

Приведение систем уравнений (4) и (5) к нормальной форме дает:


В векторно-матричной форме системы дифференциальных уравнений (6), (7) записываются соответственно в виде

где

где

Согласно основам теории систем с периодическим высокочастотным изменением структуры [6], «предельная непрерывная модель системы» описывается векторно-матричным дифференциальным уравнением
![]()
где

Переходя в системе (8) к изображениям по Лапласу и решая ее относительно изображения вектора I(p) = [I1(p),I2(p)]T (T — знак транспонирования), получаем
I(p) = [pE – A]–1hUab(p), (9)
где Uab(p) — изображение по Лапласу напряжения uab(t).
Из выражения (9) получаем изображение тока i1:
I1(p) = cT[pE – A]–1hUab(p) = W(p)Uab(p), cT = [1,0], (10)
где W(p) = I1(p) / Uab(p) = cT[pE – A]–1 — передаточная функция цепи по току i1.
Вычисление передаточной функции и ее разложение на простейшие дроби дает:

Полученное описание «предельной непрерывной модели системы» (8) позволяет изобразить ее эквивалентную электрическую схему (рис. 2в), содержащую две параллельные ветви. Ветвь, соответствующая первому слагаемому выражения (11), представляет собой, очевидно, последовательное соединение двух исходных индуктивностей L1 и L2. Вторая параллельная ветвь представляет собой RL-цепь. Ее параметры RЭКВ и LЭКВ можно определить, приравняв ее передаточную функцию

ко второму слагаемому выражения (11). В результате решения системы двух простейших алгебраических уравнений получаем

Таким образом, из эквивалентной схемы предельной непрерывной модели (рис. 2в) очевидно, что без поддержания при замкнутом ключе К2 тока во второй катушке индуктивности L2 равным току в основной катушке L1 за счет изменения γ изменяется только величина эквивалентного сопротивления RЭКВ (13). Поэтому при реально большой величине сопротивления R разомкнутого ключа и величине γ, заметно превышающий нулевое значение, ветвь ab ведет себя практически как катушка с индуктивностью L1 + L2. Экспериментально этот вывод подтвердился исследованием процесса подключения ветви ab через сопротивление r, которое на три порядка меньше сопротивления разомкнутого ключа R к источнику постоянного напряжения. Ток i1 в цепи возрастает практически по экспоненте с постоянной времени, равной (L1 + L2)/r, а напряжение на зажимах ab падает по экспоненте с той же постоянной времени. Физически невозможность регулирования индуктивности объясняется тем, что увеличение напряжения на катушке L2 при выравнивании токов в катушках вызывает уменьшение тока в катушке L1. В результате нарастание тока замедляется.
Следовательно, без поддержания тока в отключенной катушке индуктивности L2 равным току в катушке L1 невозможно эффективно управлять величиной индуктивности. В связи с этим необходимо введение устройства, поддерживающего ток в отключенной катушке L2 равным току во включенной катушке L1.
Не останавливаясь на технической реализации, имеющей, несомненно, множество вариантов, рассмотрим схему с управляемым генератором напряжения (ГН), представленную на рис. 3а.

Рис. 3. Принципиальная схема плавного регулирования индуктивности (а) и ее предельная непрерывная модель (б)
Предельная непрерывная модель схемы плавного регулирования индуктивности
На первой части периода переключений nT< t< nT + t схема рис. 3а описывается уравнением (6а). Во второй части периода nT + t< t< (n + 1)T схема описывается системой уравнений
где k — коэффициент преобразования ГН [k] = В/А = Ом.
В векторно-матричной форме эта система уравнений имеет вид

где

Предельная непрерывная модель схемы на рис. 3а описывается уравнением

где
A = γA1 + (1 – γ)A2, h = γh1 + (1 – γ)h2, γ = τ/T,

Аналогично предыдущему вычислена и разложена на простейшие дроби передаточная функция, что дало
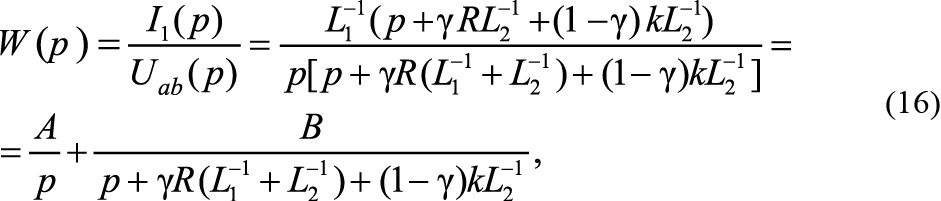
где

Из выражения (16) видно существенное влияние на свойства схемы выбора коэффициента преобразования напряжения k управляемого генератора. Нетрудно убедиться, что при выборе k = R достигается благоприятный и простой результат. Действительно, в этом случае имеем

Эквивалентная схема предельной непрерывной модели представлена на рис. 3б. Параметры схемы, определенные аналогично предыдущему, имеют значения
Экспериментальная проверка полученных теоретических результатов
Проведено моделирование схемы без поддержания тока во второй (отключаемой) катушке на втором интервале периода переключений равным току в первой (постоянно включенной) катушке и моделирование предельной непрерывной модели схемы. Приняты следующие параметры схемы: L1 = 1 Гн, L2 = 2 Гн, R = 105 Ом, T = 10–3 с, γ = 0,5. На рис. 4 представлена математическая модель исследуемой схемы, включенной через резистор с сопротивлением r = 100 Ом к источнику постоянного напряжения U = 100 В в системе Matlab 6.5 Simulink 5, Sim Power System. Там же представлена и предельная непрерывная модель исследуемой схемы. Ее расчетные параметры определены по формулам (13)
LЭКВ = L1(L1 + L2)/L2 = 1 × (1 + 2)/2 = 1,5 Гн,
RЭКВ = γR(L1 + L2)2/L22 = 0,5 × 105 × (1 + 2)2 / 22 = 1,125×105 Ом.
В математической модели рис. 4 ключ К2, шунтирующий катушку L2, учтен элементом Ideal Switch, а ключ К1 учтен его сопротивлением R в разомкнутом состоянии, поскольку замкнутый ключ К2 шунтирует R, моделируя замыкание К1. Сопротивление замкнутого Ideal Switch и его снабберная цепочка выбраны такими, что его в данной модели можно считать идеальным ключом. Моделирование проводилось методом ode15s с шагом интегрирования, не превышающим 10-6.

Рис. 4. Математическая модель схемы без выравнивания тока в катушках
На рис. 5 представлены ток i1 в реальной катушке L1 и соответствующий ток предельной непрерывной модели i1 М. Очевидно, что с точностью до пульсаций, специально преувеличенных для наглядности путем выбора заниженного значения T, i1 совпадает с i1 М, возрастающим практически по экспоненте с постоянной времени, равной (L1 + L2)/ r = 3/100 с.

Рис. 5. Процессы подключения к источнику постоянного напряжения через резистор r регулируемой индуктивности при γ = 0,5 – i1 и ее предельной непрерывной модели — i1М
На рис. 6 представлены три первых периода изменения токов i1 и i2 и напряжения u2 на катушке L2. Рис. 6 иллюстрирует физическую причину невозможности регулирования индуктивности путем изменения соотношения частей периода коммутации без обеспечения равенства тока i2 в катушке L2, отключенной во второй части периода, току i1 во включенной катушке L1. В рассматриваемом варианте схемы выравнивание токов i1 и i2 происходит в начале каждого периода коммутации, начиная со второго (рис. 6), за счет повышения напряжения на катушке L2 (u2) в начале каждого периода.

Рис. 6. Временные диаграммы токов в первой i1 и второй i2 катушках индуктивности и напряжения u2 на второй катушке
Например, к середине первого периода ток в последовательно соединенных катушках нарастает практически до значения
[U/(L1 + L2)]γT = 100/(1 + 2)×0,5×10–3 = 16,7×10–3 A.
Далее до конца периода i2 останется неизменным, а i1 возрастет до значения
50/3×10–3 + (U/L1)(1 – γ)T = 50/3×10–3 + (100/1)(1 – 0,5)×10–3 = 66,7×10–3 A.
В начале второго периода катушки соединяются последовательно, а разность токов в них, равная 50×10–3 A, перебрасывается на сопротивление R, создавая на L2 напряжение u2 = 50×10–3×105 = 5000 В (рис. 6). Токи в катушках быстро выравниваются и продолжают возрастать со скоростью, определяемой суммарной индуктивностью L1 + L2. Повышая частоту коммутации, можно уменьшить выбросы напряжения и пульсации тока, но процесс нарастания тока i1 по-прежнему будет определять суммарная индуктивность L1 + L2.
Действительно, рассмотрим быстро протекающий переходный процесс выравнивания токов i1 и i2 в начале второго периода коммутации, описываемый при пренебрежении действием относительно малого напряжения uab системой уравнений

при начальных условиях i1(T) = U/(L1 + L2)]γT + + (U/L1)(1 – γ)T, i2(T) = U/(L1 + L2)]γT. Решая систему уравнений (19) с помощью преобразования Лапласа, получаем изображение тока i1

Значение тока i1, устанавливающееся в быстро протекающем процессе выравнивания токов, можно оценить по предельной теореме операционного исчисления:

Нетрудно убедиться, что в реальных условиях большого сопротивления R следующий период начинается практически с того же значения i1 (21), которое ток имел бы при последовательном соединении катушек L1 и L2 в течение всего предыдущего периода независимо от величины γ.
Проведено также моделирование схемы с поддержанием на втором интервале периода переключений тока во второй (отключаемой) катушке равным току в первой (включенной) катушке и предельной непрерывной модели схемы. Приняты те же параметры схемы: L1 = 1 Гн, L2 = 2 Гн, R = 105 Ом, T = 1×10–3 с, γ = 0,5. На рис. 7 представлена математическая модель исследуемой схемы, включенной через резистор с сопротивлением r = 100 Ом к источнику напряжения 100 В. Параметры предельной непрерывной модели вычислены по формулам (18):
LЭКВ = L1(L1 + γL2) / γL2 = = 1×(1 + 0,5×2) / (0,5×2) = 2 Гн,
RЭКВ = R(L1 + γL2)2 / γL22 = = 105×(1 + 0,5×2)2 / (0,5×22) = 105 Ом.

Рис. 7. Математическая модель схемы с выравниванием тока в катушках
Математическая модель построена без использования элементов Sim Power System в отличие от представленной на рис. 4. Обычным образом построены модели системы на каждой из двух частей периода коммутации. Переключение моделей осуществляется блоками умножения Product 1, 2 и 3, управляемыми сигналом генератора Generator с заданной скважностью γ. Такая модель оказывается проще и точнее модели, использующей элементы Sim Power System. Моделирование проводилось методом ode45 при относительной величине ошибки 10–7.
На рис. 8 представлен переходный процесс в модели реальной схемы — i1 и в ее предельной непрерывной модели — i1 М при невысокой частоте переключений (T = 0,001 c). Там же показана разность токов i1 – i1М, имеющая существенные пульсирующую и плавную составляющие.

Рис. 8. Переходный процесс в модели реальной схемы — i1 и в ее предельной непрерывной модели — i1М при невысокой частоте переключений
Повышение частоты коммутации позволяет значительно уменьшить разницу реального тока и тока предельной непрерывной модели.
На рис. 9 представлены токи i1, i1 М и их разность, увеличенная в 100 раз, при повышенной в 100 раз частоте коммутации (T = 0,00001 c). Рис. 9 демонстрирует практическое совпадение токов i1 и i1 М. Постоянная времени экспоненты, определенная по касательной равна 0,02 с, что совпадает с определенной по предельной непрерывной модели
(L1+γL2)/r = (1 + 0,5×2)/100 = 0,02 c

Рис. 9. Переходный процесс в модели реальной схемы — i1 и в ее предельной непрерывной модели — i1М при высокой частоте переключений
На рис. 10 представлен переходный процесс при включении той же схемы и ее предельной непрерывной модели на синусоидальное напряжение u = Umsin(ωt + j), Um = 50 В, ω = 2p×50 с–1, j = 1,2 через резистор с сопротивлением r = 100 Ом.

Рис. 10. Переходный процесс при включении на синусоидальное напряжение модели реальной схемы — i1 и ее предельной непрерывной модели — i1М
Следует подчеркнуть, что рассмотренный импульсный способ регулирования индуктивности катушки представляет собой схемное решение. Индуктивность катушки в действительности не изменяется. В момент уменьшения индуктивности (в момент отключения L2) ток ветви не изменяется, хотя при мгновенном уменьшении индуктивности катушки L ток в ней i = Ψ/L (Ψ — потокосцепление) возрастает.
Выводы
- Изменение относительной продолжительности периодического подключения дополнительной катушки индуктивности последовательно основной при поддержании в отключенной катушке тока, равного току в основной катушке, позволяет плавно регулировать индуктивность.
- Отличие реальных ключей от идеальных приводит к отличию предельной непрерывной модели от регулируемой индуктивности, пренебрежимо малому при высоком качестве реальных ключей.
- При достаточно высокой частоте переключений схему импульсного регулирования индуктивности можно с необходимой точностью заменить ее эквивалентной предельной непрерывной моделью.
- Догановский С.А. Параметрические системы автоматического регулирования. — М.: Энергия, 1973. Библиотека по автоматике. Вып. 465.
- Баскаков С.И. Радиотехнические цепи и сигналы. — М:. Высшая школа, 2003. 462 c.
- Торопцев Н.Д. Авиационные асинхронные генераторы. — М:. Транспорт, 1970. 204 c.
- Коршунов А.И. Система стабилизации напряжения с параметрическим управлением. Принята к печати журналом «Электротехника».
- Коршунов А. И. Импульсное регулирование емкости конденсаторов // Изв. вузов. Сер. Приборостроение, 2015, т. 58, № 6, с. 464–472.
- Коршунов А.И. Предельная непрерывная модель системы с высокочастотным периодическим изменением структуры // Изв. вузов. Сер. Приборостроение, 2009, т. 52, № 9, с. 42–48.
 12 сентября, 2008
12 сентября, 2008 18 апреля, 2022
18 апреля, 2022 22 июня, 2022
22 июня, 2022