
Использование нелинейных структурных динамических моделей импульсных преобразователей постоянного напряжения для расчета статических характеристик
При проектировании импульсных преобразователей постоянного напряжения (ППН) в первую очередь необходимо знать параметры их установившихся режимов, определяемые статическими характеристиками, такими как внешние и регулировочные характеристики [1]. Зная эти зависимости, можно определить токи и напряжения на элементах силовой части ППН в различных установившихся режимах, необходимые для расчета параметров этих элементов. Параметры установившихся режимов необходимо также знать при синтезе замкнутых систем управления ППН, выполняемом по моделям, линеаризованным в окрестности установившегося режима.
При обосновании нелинейных дискретных структурных динамических моделей импульсных ППН [2] было отмечено, что эти модели не только позволяют рассчитывать процессы в импульсных ППН, но и существенно облегчают расчет и анализ их статических характеристик. Предлагаемая статья посвящена выводу формул для расчета статических характеристик ППН с использованием их нелинейных структурных динамических моделей.

Рис. 1. Нелинейные дискретные структурные динамические модели силовых частей импульсных ППН в РПТ:
а) понижающего;
б) повышающего;
в) инвертирующего
Нелинейные дискретные модели импульсных ППН (рис. 1) являются графическим представлением дифференциальных уравнений с разрывной правой частью, описывающих преобразователь, где

τC = rCC — постоянная времени цепи выходного конденсатора, TC = (R+rC)C — постоянная времени цепи выходного конденсатора с учетом сопротивления нагрузки R [2].
Из дискретных структурных моделей для режима прерывистого тока (РПТ) (рис. 1) очень просто получаются усредненные структурные модели для режима непрерывного тока (РНТ). Для этого, как принято в теории импульсных систем, ключи заменяются пропорциональными звеньями с коэффициентами передачи, равными относительным длительностям их замкнутых состояний. Тогда, поскольку в РНТ tс = T–t1, для получения усредненной модели понижающего ППН (рис. 2а) в дискретной модели (рис. 1а) необходимо ключи К1 и К3 заменить пропорциональными звеньями с коэффициентами передачи γ = t1/T и (1–γ) соответственно; ключ К2 в РНТ непрерывно замкнут, поэтому исключается из соответствующей ветви. Для получения усредненной модели повышающего ППН (рис. 2б) в дискретной модели (рис. 1б) все ключи, за исключением К1, необходимо заменить пропорциональными звеньями с коэффициентами передачи 1–γ; ключ К1 непрерывно замкнут, поэтому исключается из соответствующей ветви. Для получения усредненной модели инвертирующего ППН (рис. 2в) в дискретной модели (рис. 1в) ключ К1 заменяется пропорциональным звеном с коэффициентом передачи γ, а остальные ключи — звеньями с коэффициентом передачи 1–γ. При таком преобразовании, кроме замены ключей пропорциональными звеньями, входные воздействия и переменные iL, uвых необходимо заменить на их средние за период переключений величины.

Рис. 2. Усредненные нелинейные структурные динамические модели в РНТ для импульсных ППН:
а) понижающего;
б) повышающего;
в) инвертирующего
Усредненные структурные динамические модели силовых частей ППН, представленные на рис. 2, удобны не только при расчете переходных процессов, но также позволяют достаточно просто рассчитывать статические характеристики ППН.
Для расчета статических характеристик в структурных динамических моделях (рис. 2) необходимо принять p = 0. Тогда G(0) = 1/r, Z(0) = R, и из схем на рис. 2 получаются структурные схемы, представленные на рис. 3.

Рис. 3. Усредненные структурные модели для установившегося режима непрерывного тока силовых частей ППН:
а) понижающего;
б) повышающего;
в) инвертирующего
Для определения средних значений выходного напряжения uвых.ср и тока дросселя iLср в установившемся режиме необходимо схемы, представленные на рис. 3, преобразовать, «свернув» замкнутый контур, предварительно перенеся узел суммирования сигнала iн.д.ср из этого контура в соответствии с правилами, известными из теории автоматического управления [3].
Перенеся узел суммирования сигнала iн.д.ср назад (против направления распространения сигнала) и «свернув» замкнутые контуры из схем на рис. 3, получим схемы для определения uвых.ср, представленные на рис. 4.
Замкнутые контуры преобразованы в соответствии с равенствами, определяющими коэффициенты передачи замкнутого контура:
для понижающего ППН (рис. 3а)

для повышающего и инвертирующего ППН (рис. 3б, в)
где rэф = r/(1–γ)2.
Определяя uвых.ср на схемах по рис. 4, получаем выражения:

соответственно для понижающего, повышающего и инвертирующего ППН.

Рис. 4. Усредненные структурные модели для установившегося режима непрерывного тока, преобразованные для определения среднего значения выходного напряжения ППН:
а) понижающего;
б) повышающего;
в) инвертирующего
Для определения среднего значения тока силового дросселя iLср в установившемся режиме в схемах на рис. 3 необходимо считать выходной величиной ток iLср, а узел суммирования сигнала iн.д.ср перенести вперед, а не назад (иначе сигнал на выходе звена с коэффициентом передачи 1/r уже не будет совпадать с током iLср). Тогда из схем на рис. 3 получаются схемы, представленные на рис. 5.

Рис. 5. Усредненные структурные модели для установившегося режима непрерывного тока, преобразованные для определения среднего значения тока силового дросселя ППН:
а) понижающего;
б) повышающего;
в) инвертирующего
Замкнутые контуры на рис. 5 преобразуем в соответствии с равенствами:
для понижающего ППН (рис. 5а)

для повышающего и инвертирующего ППН (рис. 5б, в)

Определяя iLср на схемах по рис. 5, получаем выражения:
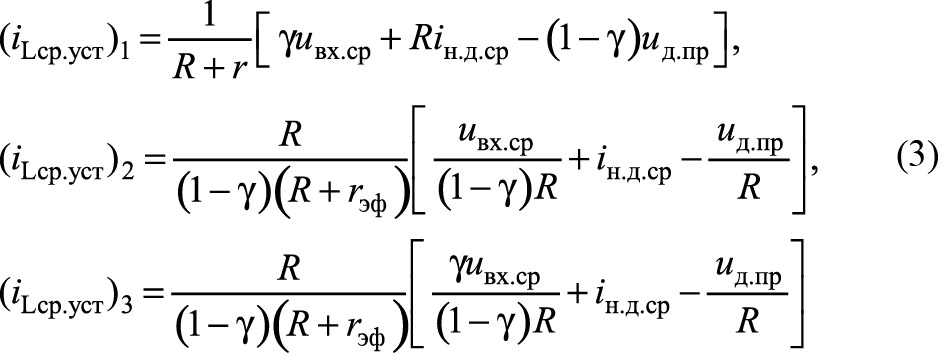
соответственно для понижающего, повышающего и инвертирующего ППН.
Таким образом, усредненные структурные модели для установившегося режима, представленные на рис. 3, удобны для расчета статических характеристик ППН. Они легко запоминаются.
Преобразуя первое равенство (2) с учетом выражения

получим

Отсюда следует формула для расчета статических выходных характеристик понижающего ППН:
(uвых.ср.уст)1 = γuвх.ср – riн.ср – (1 – γ)uд.пр. (5)
При учете (4) первое равенство (3) преобразуется к виду
(R + r)iLср = Riн.ср – uвых.ср – (1 – γ)uд.пр,
откуда при подстановке выражения (5) следует известное для понижающего ППН равенство:
(iLср.уст)1 = iн.ср. (6)
Для повышающего ППН второе равенство (2) также преобразуем с учетом (4):

откуда следует

а из второго равенства (3) с учетом (4) и (7) получим:

Третье равенство (2) для инвертирующего ППН также преобразуем с учетом равенства (4):

Исключая из обеих частей этого равенства величину (rэф/R)uвых.ср, придем к выражению для расчета внешних характеристик инвертирующего ППН:

Из третьего уравнения (3) с учетом (4) и (9) получим соотношение (8), полученное при рассмотрении повышающего ППН.
Внешние и регулировочные характеристики понижающего ППН (рис. 6) строим по формуле (5).

Рис. 6. Характеристики понижающего импульсного преобразователя в режиме непрерывного тока:
а) внешние;
б) регулировочные (граница области непрерывного тока для T/TL = 0,1(штриховые линии), где TL = L/r)
Чтобы придать внешним характеристикам на рис. 6 более обобщенный вид, не требующий учета конкретных значений прямого падения напряжения на силовом диоде uд.пр, формулу (5) представим в виде:
uвых.ср + uд.пр = γ(uвх.ср + uд.пр) – riн.ср
и введем безразмерные переменные:

Тогда равенство (5) принимает вид
![]()
При построении на рис. 6 обобщенных внешних и регулировочных характеристик по формуле (11) по вертикальной оси отложена безразмерная величина uвых.ср, а по горизонтальной оси — безразмерные величины iн.ср и γ.
Особенностью внешних характеристик в РНТ (рис. 6а) является одинаковый наклон при различных γ и одинаковое смещение по вертикали при одинаковых приращениях γ.
Из равенств (10) следуют формулы пересчета для определения выходного напряжения и тока нагрузки по их безразмерным значениям:
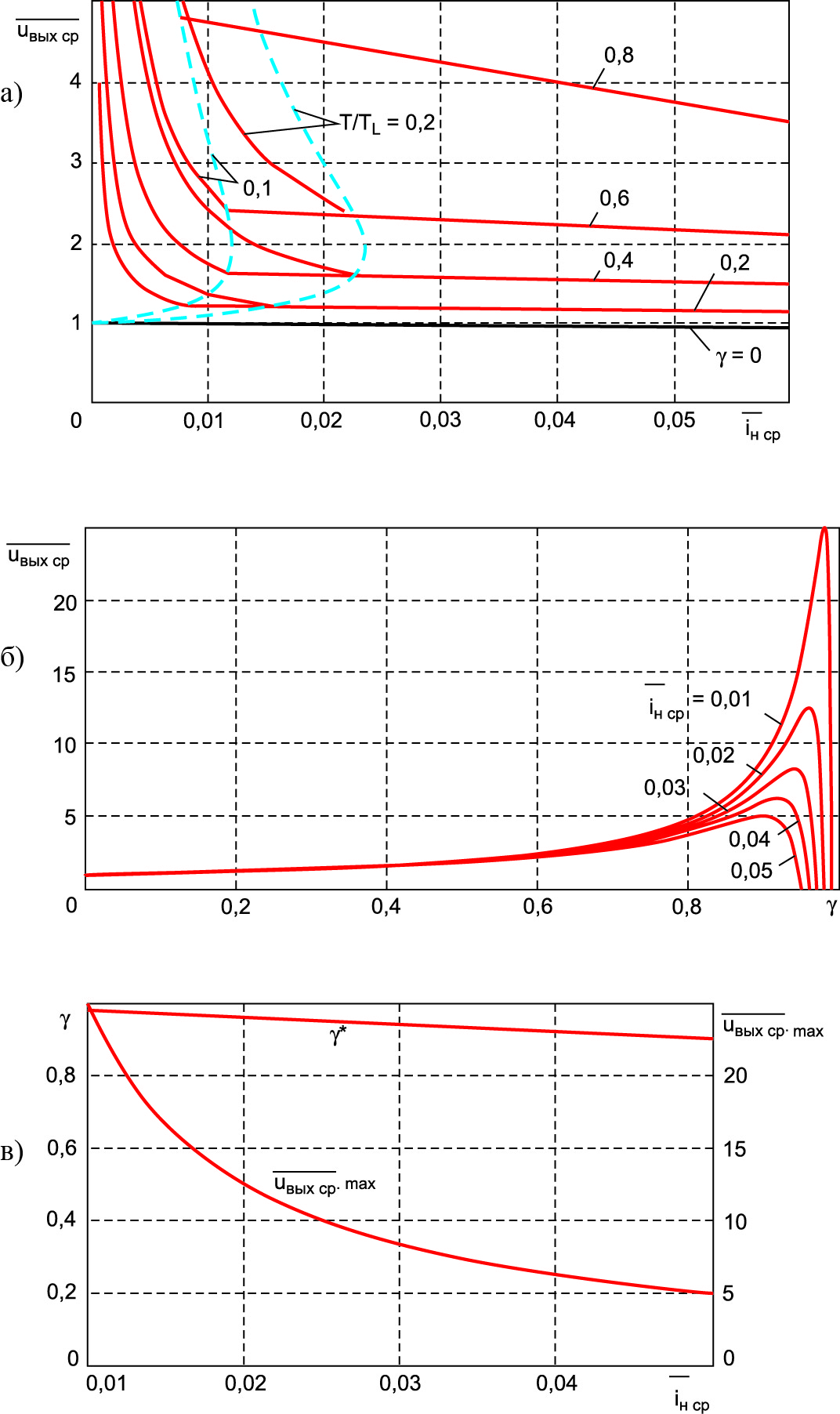
Рис. 7. Характеристики повышающего ППН в РНТ:
а) внешние;
б) регулировочные;
в) зависимости для максимальных значений регулировочной характеристики ( TL = L/r)
Для построения статических характеристик повышающего ППН в РНТ (рис. 7а, б) воспользуемся формулой (7), которую представим в виде:

где, в отличие от (10),

Внешние и регулировочные характеристики повышающего ППН представлены на рис. 7. Максимум регулировочной характеристики

достигается при
![]()
Пересчет средних значений выходных напряжения и тока нагрузки повышающего ППН выполняется по формулам:

Статические характеристики инвертирующего ППН в РНТ (рис. 8а, б) рассчитываются по формуле (9), которую представим в виде:


Рис. 8. Характеристики инвертирующего ППН в РНТ:
а) внешние;
б) регулировочные;
в) зависимости для максимальных значений регулировочной характеристики ( TL = L/r)
Максимум регулировочной характеристики

достигается при том же значении (15), что и для повышающего ППН.
Пересчет средних значений выходных напряжения и тока нагрузки инвертирующего ППН выполняется по формулам (16), приведенным для повышающего ППН.
Анализ КПД с учетом потерь проводимости
Предполагая uвх = uвх.ср = const, uвых = uвых.ср = const, КПД ППН в установившемся режиме будем определять по формуле

где iвх.ср — среднее значение входного тока ППН.
Сопротивление r, которое входит в полученные ранее расчетные соотношения, позволяет учесть потери мощности в обмотке силового дросселя и потери проводимости в силовом транзисторе, а учет прямого падения напряжения на силовом диоде — потери проводимости в этом диоде. Справедливы следующие равенства, связывающие среднее значение входного тока со средним значением тока нагрузки, для понижающего, повышающего и инвертирующего ППН:

Подставив выражения (20) в равенство (19), получим формулы для КПД с учетом только потерь проводимости для понижающего, повышающего и инвертирующего ППН:

Результирующий КПД меньше hпр, поскольку имеются дополнительные потери мощности, обусловленные переменной составляющей тока iL, и потери при переключениях полупроводниковых приборов.
Для определения зависимости КПД от тока нагрузки в формулах (21) целесообразно выразить γ через iн.ср, используя уравнения (5), (7) и (9). Из уравнения (5) найдем выражение

с учетом которого первая формула (21) принимает вид:

позволяющий строить зависимости КПД (hпр)1 от отношений riн.ср/uвых.ср = r/Rн.экв, uвых.ср/uвх.ср и uд.пр/uвых.ср (рис. 9). Как видно из (22), при uд.пр = 0 КПД не зависит от отношения uвых.ср/uвх.ср. При uд.пр ≠ 0, как видно на рис. 9, КПД снижается с уменьшением выходного напряжения.

Рис. 9. Зависимости КПД от тока нагрузки для понижающего ППН при uд.пр/uвых.ср = 0; 0,1; 0,2; 0,3 и uвых.ср/uвх.ср = 0,5 (сплошные линии), uвых.ср/uвх.ср = 0,4(штриховые линии)
Для повышающего ППН выражать γ из уравнения (7) при расчете КПД нецелесообразно, поскольку приходится решать квадратное уравнение. Поэтому, представив уравнение (7) в виде

будем задаваться значениями 1–γ и рассчитывать по формулам (23) и (21) соответствующие значения (riн.ср/uвых.ср)2 и (hпр)2 (рис. 10). При этом необходимо учитывать, что величина 1–γ из уравнения (7) определяется неоднозначно, вследствие чего неоднозначными оказываются и зависимости, построенные на рис. 10.

Рис. 10. Зависимости КПД от тока нагрузки для повышающего ППН при uвых.ср/uвх.ср = 5; 10; 15; 20 и uд.пр/uвых.ср = 0 (сплошные линии), uд.пр/uвых.ср = 0,1 (штриховые линии)
Анализируя параметрически заданную функцию (hпр)2 от iн.ср, найдем, что максимальное значение тока нагрузки на рис. 10, равное

достигается при значении γ, определяемом из равенства

При этом значении γ КПД снижается до значения

примерно равного 0,5.
Оказывается, что равенство (23) совпадает с (14), если в (14) учесть выражения (13). Участки кривых, показанных на рис. 10, расположенные ниже уровня (hпр)2* = 0,5, соответствуют работе ППН правее точки максимума регулировочных характеристик (рис. 7б), что, как видно, нецелесообразно из-за снижения КПД.
Поскольку согласно (7) справедливо неравенство

необходимо задаваться значениями 1–γ, удовлетворяющими условию

При определении КПД инвертирующего ППН равенство (9) представим в виде:

Тогда равенства (21) и (27) задают зависимость КПД (hпр)3 от тока iн.ср в параметрической форме (с параметром γ). Графики этой зависимости построены на рис. 11.

Рис. 11. Зависимости КПД от тока нагрузки для инвертирующего ППН при uвых.ср/uвх.ср = 5; 10; 15; 20 и uд.пр/uвых.ср = 0 (сплошные линии), uд.пр/uвых.ср = 0,1 (штриховые линии)
Анализируя параметрически заданную функцию (hпр)3 от riн.ср/uвых.ср, найдем, что максимальное значение тока нагрузки на рис. 11, равное

достигается при значении

Подстановка значения γ = γ* в выражение (21) приводит к равенству

Таким образом, при расчете КПД необходимо задаваться значениями γ в диапазоне

и рассчитывать соответствующие значения (hпр)3 и тока riн.ср/uвых.ср по формулам (21) и (26).
Оказывается, что равенство (28) совпадает с (18), если в (18) учесть выражения (13). Участки кривых на рис. 11, расположенные ниже уровня (hпр)3*, соответствуют работе ППН правее точки максимума регулировочных характеристик (рис. 8б).
Работа повышающего и инвертирующего ППН на спадающих участках регулировочных характеристик (рис. 7а и 8а) нецелесообразна, что ограничивает ток нагрузки значениями, определяемыми формулами (23) и (28) для повышающего и инвертирующего ППН соответственно.
Таким образом, использование нелинейных структурных динамических моделей существенно упрощает получение формул для расчета статических характеристик импульсных ППН, поскольку исключается этап усреднения дифференциальных уравнений, описывающих силовую часть ППН. Однако для этого приходится восстановить в памяти известные из теории автоматического управления правила преобразований структурных схем линейных непрерывных систем управления.
- Четти П. Проектирование ключевых источников электропитания: Пер. с англ. — М.: Энергоатомиздат. 1990.
- Белов Г. А. Нелинейные дискретные структурные динамические модели импульсных ППН // Силовая электроника. 2014. № 3.
- Попов Е. П. Теория линейных систем автоматического регулирования и управления. — М.: Наука. 1978.
 27 марта, 2024
27 марта, 2024 13 мая, 2011
13 мая, 2011 9 апреля, 2020
9 апреля, 2020