
Автономные системы электропитания на основе синхронных генераторов возвратно-поступательного движения
Введение
Перспективы использования двигателей Стирлинга в различных областях энергетики в настоящее время стали очевидными для всех промышленно развитых государств. Ведущими странами в области проектирования и создания двигателей Стирлинга являются США, Великобритания, Япония, Нидерланды и Израиль [6, 7, 8]. Двигатель Стирлинга относится к классу двигателей с внешним подводом тепла от сгорания газа, что отличает его от двигателей с внутренним сгоранием и газотурбинных установок. Существуют различные конструкции двигателей Стирлинга, среди которых наиболее перспективным является свободнопоршневой двигатель [12, 13].
Преимуществом автономных энергосистем с использованием свободнопоршневых двигателей Стирлинга (СПДС) являются:
- низкий уровень шума и вибрации;
- малая токсичность отработавших газов;
- возможность работы на различных видах топлива, как традиционных (газ, нефтепродукты), так и нетрадиционных (биогаз, уголь, отходы лесной промышленности), включая солнечную и радиоизотопную энергию тепла;
- большой ресурс работы без обслуживания, поскольку не требуется масляная смазка, отсутствует шатунно-кривошипный механизм и редуктор.
Все это позволяет создавать автономные энергоустановки для работы продолжительное время на удаленных объектах, в отсутствие обслуживающего персонала.
Автономные энергоустановки на основе СПДС могут бесперебойно обеспечивать электроэнергией и, при необходимости, тепловой энергией магистральные объекты предприятий топливно-энергетического комплекса в местах отсутствия центральных электросетей, а также индивидуальные жилые дома и другие строения.
В настоящей работе будет рассмотрен подвод тепла к двигателю от внешней горелки, работающей от природного газа низкого давления. В качестве генератора возвратно-поступательного движения используется синхронный однофазный линейный генератор с постоянными магнитами (ЛГПМ) [2].
Краткие сведения о конструкции и принципе работы ЛГПМ
Для преобразования механической энергии возвратно-поступательного движения рабочего поршня СПДС в электрическую энергию используется однофазный синхронный линейный генератор, интегрированный в корпус двигателя. Генератор создает синусоидальное напряжение, величина которого пропорциональна амплитуде колебания поршня, а частота определяется скоростью движения поршня и составляет (50±0,5) Гц. Конструкция генератора содержит неподвижный внешний магнитопровод с расположенной внутри его свободной полости кольцевой обмоткой статора и внутренний неподвижный магнитопровод для усиления магнитного потока (рис. 1).

Рис. 1. Конструкция линейного генератора с постоянными магнитами
Индуктор генератора выполнен в виде пустотелого тонкостенного стального стакана с прикрепленными с наружной стороны дугообразными радиально намагниченными постоянными магнитами. Индуктор является подвижной частью генератора и может свободно перемещаться в зазоре между внешней и внутренней неподвижными частями магнитопровода статора. При возвратно-поступательном движении индуктора (колебания в пределах 10–12 мм) магнитный поток постоянных магнитов наводит в обмотку статора переменную ЭДС синусоидальной формы 260–230 В. Для снижения потерь от вихревых токов, наводимых переменным магнитным потоком в пустотелом стакане индуктора, по периферии стакана сделаны аксиальные прорези [4]. Это позволяет также снизить массу подвижной части генератора. Номинальная мощность генератора составляет 1 кВт.
По сути, генератор представляет собой колебательный контур со встроенным в конструкцию индуктором на постоянных магнитах, возвратно-поступательное движение которых относительно неподвижной обмотки статора создает возможность прямой подкачки электрической энергии в колебательный контур. Внешняя нагрузка, подключенная к этому контуру, потребляет энергию, а циклическое движение магнитов за счет работы двигателя подкачивает энергию в контур. Процесс обмена энергией гармонизируется за счет резонанса в электрическом колебательном контуре и резонанса механической системы двигателя, связанных общей частотой.
Структура и состав модуля генерации (МГ)
Модуль генерации, помимо СПДС, содержит системы газоподачи, поджига, охлаждения, выхлопа, электронный блок силовой коммутации и преобразования, систему автоматического управления (САУ). В САУ входят контроллер двигателя и контроллер газовой горелки. Структурная схема модуля генерации и его элементы приведены на рис. 2. Система подвода тепла состоит из следующих элементов:
- кольцевая газовая горелка конфорочного типа с инжекцией смеси;
- трубка Вентури в качестве смесителя для подготовки газовоздушной смеси;
- вентилятор наддува для подачи воздуха на горение и регулирование количества газовоздушной смеси;
- клапанная сборка, состоящая из двух отсечных газовых клапанов и мембранного регулятора расхода газа с пневматической обратной связью от смесителя Вентури для регулирования расхода газа;
- контроллер безопасности, управляющий процессом розжига и обеспечивающий контроль пламени;
- ионизационный датчик пламени;
- искровый разрядник системы поджига и импульсный высоковольтный трансформатор.

Рис. 2. Структурная схема модуля генерации:
ДГ01 — двигатель–генератор (СПДС);
А01 — блок розжига;
А02 — контроллер газовой горелки;
А03 — контроллер двигателя;
IE01 — датчик горения;
FV01 — свеча зажигания;
РК01 — клапанный блок в составе К01, К02 (газовые клапаны отсечные электромагнитные) и РП01 — регулируемый клапан пневматический;
ГГ01 — газовая горелка;
SPD — управление скоростью вращения вентилятора;
ВР01 — вентилятор подачи воздуха;
СП01 — газовый смеситель (трубка Вентури);
TS01, TS02, TS03 — термореле;
FT01 — датчик расхода охлаждающей жидкости;
SQ01, SQ02 — датчики вибрации корпуса двигателя (концевые выключатели);
ТЕ01–ТЕ07 — температурные датчики;
С1 — настроечная емкость;
S01–S04 — органы управления САУ;
HL01–HL04 — органы индикации САУ;
Rstart — стартовый резистор;
Rstop — стоп-резистор
Система охлаждения состоит из трубопроводов местной системы охлаждения и запорной арматуры. Входной и выходной патрубки системы охлаждения снабжены датчиками контроля температуры (терморезисторы), на входном патрубке установлен также датчик расхода охлаждающей жидкости. Температура входной воды не ниже +6 °С, а температура на выходе систем охлаждения — не выше +75 °С.
Настроечная емкость С1, включенная последовательно с обмоткой статора генератора, обеспечивает электрический резонанс цепи, настроенный на частоту 50 Гц, что создает пассивную коррекцию коэффициента мощности генерирующего модуля и улучшает рабочие характеристики линейного генератора. Назначение стартового резистора — ограничение тока статора в момент пуска двигателя, а стоп-резистора — немедленный останов двигателя при аварийных режимах.
Конструктив модуля генерации (МГ) представляет собой металлический каркас (раму), на котором крепятся двигатель Стирлинга и металлический шкаф САУ и силовой электроники, в котором расположены контроллер двигателя, контроллер газовой горелки, органы управления и индикации состояния МГ. На корпусе СПДС установлены датчики вибрации корпуса двигателя (концевые выключатели).
Оборудование и арматура для автономных систем электропитания сейчас широко доступны.
Контроллер двигателя
Контроллер двигателя обеспечивает необходимый алгоритм работы модуля генерации. Функциональная блок-схема контроллера представлена на рис. 3. Центральный процессор получает питание от встроенных блоков питания цифровых и аналоговых цепей, выходные напряжения которых контролируются схемой сброса процессора и мониторинга питающих напряжений.
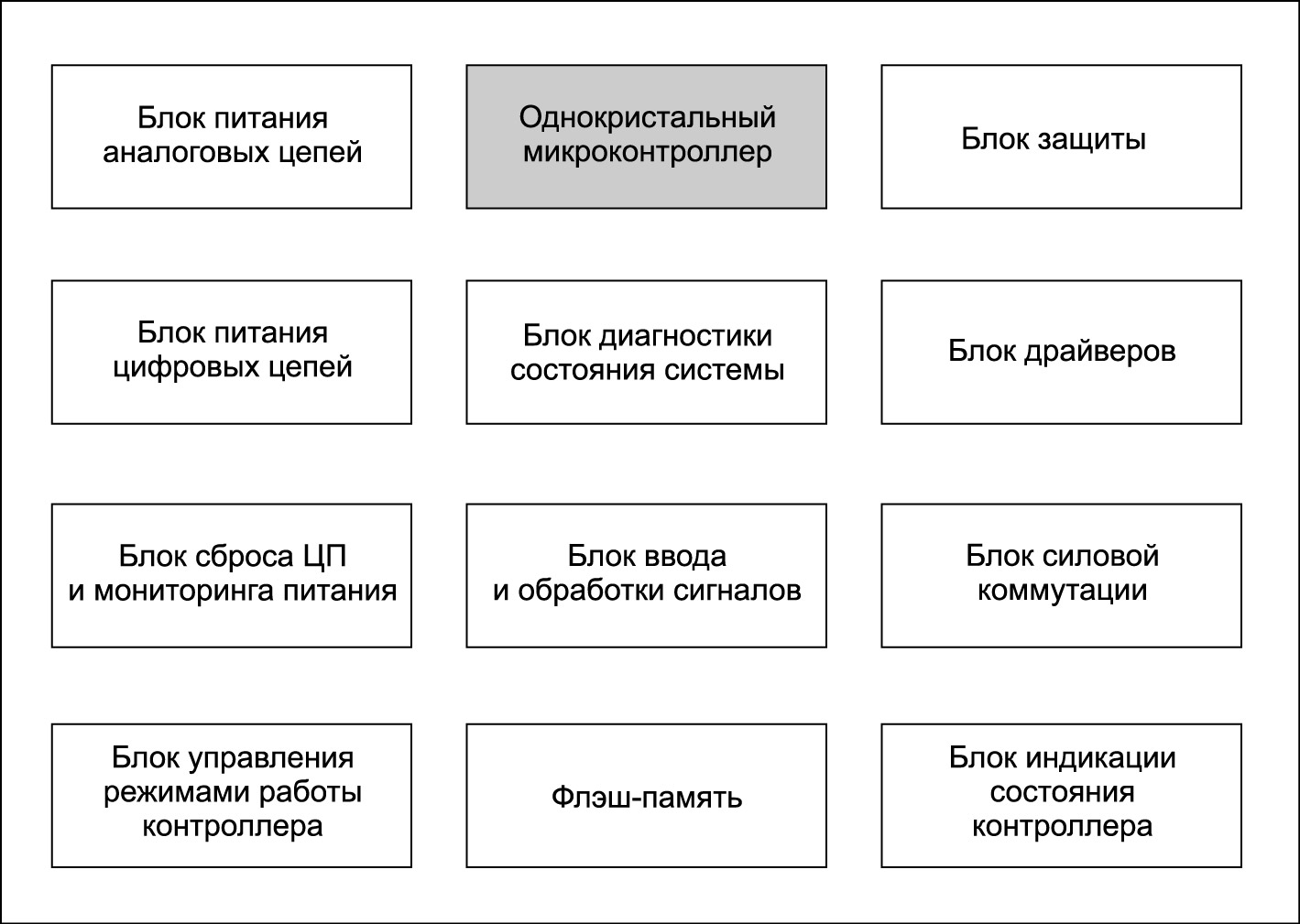
Рис. 3. Блок-схема контроллера двигателя
Блок ввода и предварительной обработки (нормализации) аналоговых и цифровых сигналов обеспечивает подключение к контроллеру как встроенных в блок силовой коммутации МГ датчиков аналоговых сигналов, так и внешних датчиков. В качестве внутренних датчиков используются датчики тока генератора, тока нагрузки, тока аккумуляторной батареи, а также датчики напряжения в соответствующих сечениях системы. В качестве внешних датчиков используются датчики технологических переменных, значения которых поддерживаются средствами регулирования: датчики температуры, расхода и т. д.
На контроллер двигателя поступают следующие сигналы с датчиков, интегрированных в корпус СПДС:
- измеренные действующие значения тока, напряжения и частоты на выходе генератора;
- текущая (контролируемая) и предельная температура тепловой головки (сигналы термопар);
- температура корпуса двигателя (терморезистор);
- превышение вибрации корпуса двигателя (сигнал с концевого выключателя).
- Кроме этого, в контроллер двигателя поступают дополнительные сигналы с внешних датчиков:
- температура окружающей среды (терморезистор);
- температура на входе и выходе охлаждающей системы (терморезисторы);
- скорость обмена (расход) охладителя;
- сигнал тахометра вентилятора подачи воздуха.
Блок управления режимами работы контроллера позволяет выбрать локальное (местное) или дистанционное управление МГ, режим пуска или останова двигателя. Блок управления программированием внутренней флэш-памяти позволяет выполнить загрузку программного обеспечения с персонального компьютера по последовательному каналу связи RS-232.
Блок защиты обеспечивает защитные функции системы генерации при выходе технологических параметров за допустимые значения. Блок индикации состояния контроллера отражает наличие питания, рабочее состояние или аварию. Блок диагностики определяет состояние всех информационных связей системы. Контроллер двигателя вырабатывает следующие сигналы:
- разрешение к запуску модуля генерации после диагностики состояния всех информационных связей системы;
- включение контроллера газовой горелки;
- управление вентилятором (питанием двигателя вентилятора);
- стартовый импульс для запуска двигателя при достижении определенной температуры тепловой головки.
- Кроме того, он осуществляет следующие функции:
- контролирует текущую температуру тепловой головки;
- определяет текущую выходную электрическую мощность;
- формирует сигнал о выходе МГ на номинальный режим.
Блок драйверов обеспечивает согласование уровня выходных сигналов с центрального процессора с требованиями по управлению коммутационными элементами блока силовой коммутации (силовых реле, транзисторов, симисторов). Последний осуществляет коммутацию силовых электрических цепей системы: подключение/отключение генератора к нагрузке или общей шине при многомодульном исполнении системы, подключение стартового резистора пускового устройства в момент запуска двигателя, закорачивание выхода генератора стоп-резистором при отключении двигателя, а также обеспечивает регулирование мощности балластной нагрузки и т. д.
Алгоритмы управления модулем генерации
На рис. 4 показана циклограмма процесса пуска двигателя. После получения сигнала о завершении диагностики системы разрешается подача электропитания на контроллер газовой горелки, который включает вентилятор подачи воздуха, и через некоторое время включается газовый клапан системы газоподачи. Одновременно с этим с контроллера газовой горелки на блок поджига подается импульсный сигнал зажигания газовой смеси. При успешном поджиге возникает сигнал пламени и начинается рост температуры тепловой головки двигателя. При достижении тепловой головкой значения температуры разрешения пуска (+170…+210 °C) в статорную обмотку генератора подается стартовый импульс от пускового устройства, вызывающий возвратно-поступательное движение рабочего поршня двигателя и индуктора линейного генератора. Время выхода на требуемый тепловой режим составляет до 2 мин в зависимости от температуры окружающей среды. По мере увеличения температуры тепловой головки растет электрическая мощность на выходе МГ, и через 8 мин, при достижении температуры тепловой головки +550 °C, система выходит на номинальную мощность.

Рис. 4. Циклограмма процесса пуска двигателя
На рис. 5 приведена циклограмма процесса нормального останова двигателя МГ. Сигнал на выключение источника тепла переводит режим работы вентилятора на постоянные обороты. При этом происходит выключение газового клапана. Контроллер сигнализирует о пропадании пламени, и температура тепловой головки начинает снижаться. При значении температуры около +210 °C двигатель останавливается. Вентилятор горения продолжает работать для интенсивного охлаждения тепловой головки.

Рис. 5. Циклограмма процесса останова двигателя
При аварийном останове двигателя цепь генератора и настроечной емкости закорачивается стоп-резистором, что вызывает перегрузку двигателя, и он немедленно останавливается.
Классификация многомодульных АСЭП
В основе многомодульного принципа построения АСЭП заложено параллельное включение модулей генерации на общую выходную шину, что обеспечивает необходимое резервирование системы по принципу «n+x» и возможность наращивания мощности системы при необходимости увеличения числа потребителей [1, 5]. Равномерное токораспределение между модулями обеспечивается согласованием их выходных характеристик. Многомодульные системы подразделяются по принципу формирования общей шины постоянного или переменного тока [3]. На рис. 6 приведена классификация многомодульных АСЭП.

Рис. 6. Классификация многомодульных АСЭП
Одним из принципов наращивания мощности в многодвигательной системе является применение выпрямительных блоков в каждом МГ с организацией общей шины постоянного тока для полезной нагрузки с подключенным к ней общим аккумуляторным модулем (рис. 7). Различают использование низковольтных выпрямителей (48 В) и высоковольтных активных выпрямителей (600 В). Структуры с общей шиной постоянного тока, несмотря на относительную простоту решения, имеют ряд недостатков:
- требуется ограничение бросков входного тока при включении выпрямительных блоков;
- требуется инвертор для питания собственных нужд;
- наличие в силовой цепи выпрямительных блоков снижает системный коэффициент полезного действия;
- из-за разброса выходных характеристик модулей в переходных режимах снижается динамическая устойчивость системы.

Рис. 7. Структурная схема многомодульной системы с общей шиной постоянного тока:
МГ — модуль генерации;
ВБ — выпрямительный блок;
РБН — регулятор балластной нагрузки;
АБ — аккумуляторная батарея;
ИН — инвертор;
СН — нагрузка собственных нужд;
ОШ — общая шина;
RБ — балластная нагрузка;
RН — полезная нагрузка
Другим принципом суммирования мощностей от нескольких МГ является формирование общей шины переменного тока (рис. 8а). Для этого можно использовать двунаправленный инвертор (SUNNY ISLAND-08H производства SMA [9] или CONEXT XW+ 8548 производства Schneider Electric [10]), обеспечивающий создание общей шины переменного тока и поддержание на ней стабильного по частоте напряжения 50 Гц в пределах 220–253 В. Инвертор обеспечивает преобразование энергии постоянного тока от аккумуляторных батарей 48 В в стабилизированное напряжение переменного тока на общей шине 50 Гц. Мощность инвертора должна быть равна или больше суммарной мощности всех генераторов, подключенных к общей шине. От выходного напряжения инвертора запускаются двигатели МГ, и генераторы начинают выдавать мощность в общую шину. В процессе выхода линейных генераторов на номинальный режим инвертор выдает в общую шину необходимую мощность для питания нагрузки. Двунаправленный инвертор характеризуется тем, что возможен также режим заряда аккумуляторной батареи от энергии переменного тока общей шины, когда к ней подключены генераторы МГ, обеспечивающие превышение генерирующей мощности над потребляемой нагрузкой мощностью. При достижении полного заряда аккумуляторной батареи избыточная мощность гасится регулируемой балластной нагрузкой, или происходит снижение суммарной генерируемой мощности в общую шину переменного тока за счет отключения отдельных двигателей для сохранения баланса мощностей в системе. Инвертор позволяет работать с нелинейной нагрузкой и нагрузками с высокими значениями пусковых токов. Отметим, что инвертор/зарядное устройство — это двунаправленный преобразователь, обладающий следующей функциональностью:
- Преобразует энергию, накопленную аккумуляторами, в однофазное напряжение 230 В/50 Гц. Этот режим используется для запуска двигателей, их синхронизации на общей шине, электропитания собственных нужд системы (насос охлаждения, вентиляция, вторичные источники питания, автоматика и т. п.) и для электропитания полезной нагрузки.
- Обеспечивает работу совместно на общей шине переменного тока с генераторами МГ, определяет и поддерживает рабочую частоту шины переменного тока.
- Отдает дополнительную энергию в шину переменного тока и в подключенную к этой шине нагрузку, если суммарная мощность генераторов МГ менее этой нагрузки.
- Переходит в режим рекуперации (заряда батареи) в случае, когда мощность работающих генераторов МГ превышает мощность подключенной нагрузки.

Рис. 8. Структурные схемы многомодульных систем с общей шиной переменного тока с применением инвертора:
а) с двунаправленным инвертором;
б) с однонаправленным инвертором:
МГ — модуль генерации;
ДИН — двунаправленный инвертор;
ОИН — однонаправленный инвертор;
ЗУ — зарядное устройство;
РБН — регулятор балластной нагрузки;
АБ — аккумуляторная батарея;
ОШ — общая шина;
СН — нагрузка собственных нужд;
RБ — балластная нагрузка;
RН — полезная нагрузка
Представляет интерес использование однонаправленного общепромышленного инвертора и выпрямительного блока, выполняющего функции зарядного устройства (ЗУ) и подключенного к общей шине (рис. 8б). Однонаправленный инвертор преобразует энергию постоянного тока от аккумуляторной батареи, обеспечивая синхронизирующее напряжение переменного тока 50 Гц/230 В на общей шине. От этого напряжения запускаются двигатели МГ, и когда мощность работающих генераторов МГ превысит мощность подключенной нагрузки, выпрямительный блок (ЗУ) будет обеспечивать необходимый ток подзаряда аккумуляторной батареи. Использование стандартного общепромышленного инвертора напряжения в такой структуре обеспечивает хорошие экономические показатели проектируемой многомодульной автономной системы электропитания.
Внешние характеристики генераторов в многомодульной системе с общей шиной переменного тока
Особенностью работы линейного генератора является отсутствие в его составе регулятора напряжения. Внешние характеристики параллельно работающих синхронных генераторов характеризуются различным наклоном (коэффициентом статизма), определяющим долю мощности нагрузки, приходящуюся на данный генератор. Инвертор в такой системе представляет абсолютно жесткий источник опорного напряжения со стабильной частотой и уровнем напряжения U0, выполняющий роль «ведущего генератора» с астатической характеристикой регулирования [11]. Распределение нагрузок по методу астатической характеристики на примере системы с тремя МГ представлено на рис. 9. Здесь суммарная мощность нагрузки составит:
РН = Р1+Р2+Р3. (1)
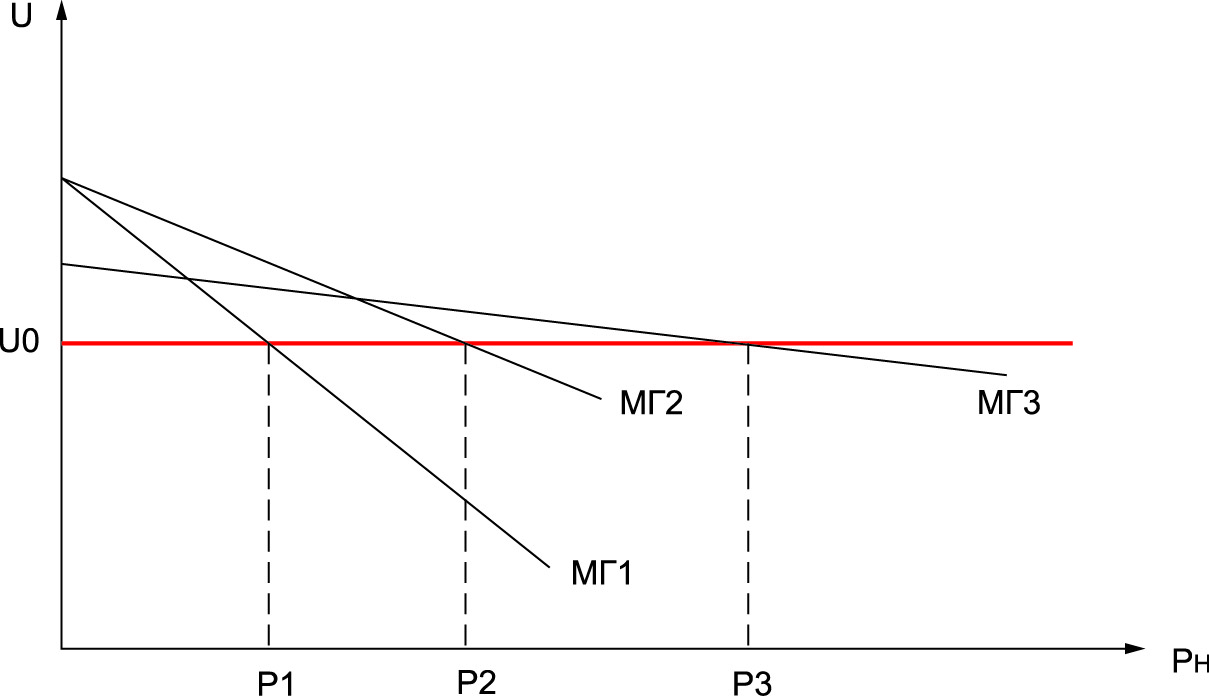
Рис. 9. Внешние характеристики линейных генераторов
Неравномерность распределения мощностей генераторов определяется по значениям мощности каждого МГ по выражению:

где Pmax — максимальное показание мощности МГ; Pmin — минимальное показание мощности МГ; Pср — среднее значение мощности МГ за время измерений.
где Pi — мощность МГ при i-ом измерении; n — количество измерений при испытании.
Тестовые испытания автономной системы электропитания на основе шести МГ с использованием СПДС модели РМ-1 производства Microgen [6] (мощностью 1 кВт каждый) показали, что неравномерность распределения мощностей генераторов не превышает 6–8% номинальной мощности МГ.
Заключение
Наиболее рациональным принципом построения многомодульных систем электропитания на основе свободнопоршневых двигателей Стирлинга с линейным генератором является организация общей шины переменного тока. Роль опорного источника, обеспечивающего синхронизацию при параллельной работе генераторов, выполняет инвертор, работающий за счет энергии аккумуляторной батареи. Достоинствами такой системы являются:
- обеспечение равномерности распределения мощностей между генераторами;
- простота реализации пусковых режимов двигателей;
- повышенный коэффициент полезного действия системы;
- высокая надежность системы.
- Климов В. П., Демьянов А. В., Климова С. Р., Смирнов В. Н. Мультимодульная система суммирования мощностей генераторов переменного тока // Практическая силовая электроника. 2015. № 1(57).
- Хитерер М. Я., Овчинников И. Е. Синхронные электрические машины возвратно-поступательного движения. СПб.: Корона принт. 2013.
- Каргиев В. М. Методы построения гибридных автономных и резервных систем электроснабжения.
- Patent USA №5642088. Magnet support sleeve for linear electromechanical transducer. 1997.
- Patent USA №788819 B2. Multi-input power converter and uninterruptable power supply having the same.
- microgen-engine.com /ссылка утеряна/
- sunpower.com
- Qnergy.com
- SMA-Solar.com
- schneider-electric.com/solar /ссылка утеряна/
- Морозовский В. Т., Синдеев И. М., Рунов К. Д. Системы электроснабжения летательных аппаратов. М.: Машиностроение. 1973.
- Ридер Г., Хупер Ч. Двигатели Стирлинга. Пер. с англ. М.: Мир. 1986.
- Уокер Г. Двигатели Стирлинга. Пер. с англ. М.: Машиностроение. 1985.
 20 декабря, 2021
20 декабря, 2021 19 октября, 2021
19 октября, 2021 24 августа, 2021
24 августа, 2021