
Измерение параметров индукторов установок индукционного нагрева на режимах, близких к номинальным
Индуктор представляет собой систему из проводов, создающих высокочастотное электромагнитное поле, и нагреваемого проводящего материала. Следует отметить нелинейность этой системы, определяемую различным поведением нагреваемого материала в полях с различными напряженностями и частотами. Этим определяется нежелательность измерения параметров системы «индуктор — проводящий материал» при напряжениях и токах, протекающих в индукторе и существенно отличающихся от тех, которые характеризуют систему в номинальном режиме работы.
Известны способы и устройства для измерения добротности Q индукторов [1, 2]. В данных устройствах измерение Q производится на малых токах, что в ряде случаев может привести к погрешностям, необходимости пересчета полученных параметров или увеличению объема экспериментальных работ при согласовании источника питания с индукторами для индукционного нагрева. Рассмотрим разряд конденсатора C на упрощенную эквивалентную последовательную схему замещения индуктора, состоящую из активного сопротивления R и индуктивности L (рис. 1). Коммутация в схеме производится идеальным ключом K.

Рис. 1. Схема разряда конденсатора на эквивалентную последовательную схему замещения индуктора
Будем считать, что сопротивление R состоит из трех сопротивлений
Rинд=R1+R2 (1)
где R1 — сопротивление индуктора, учитывающее потери в меди; R2 — приведенное суммарное сопротивление нагреваемого тела; R3 — сопротивление ключа, вносимое в контур.
Определим также сопротивление индуктора:
Общеизвестно, что ток в цепи, приведенной на рис. 1, описывается следующим выражением:

где U0 — напряжение, до которого заряжен конденсатор в момент замыкания ключа;

Мгновенное значение кривой тока (2) приведено на рис. 2.

Рис. 2. Мгновенное значение кривой тока в схеме для измерения параметров индуктора для индукционного нагрева
Определим декремент затухания

Из (3), логарифмируя и преобразуя, получим:

Далее:

Отсюда:

Из (5) получим:

Считая C известным, из (6) получим Li:

Из (7) и (4) получим Ri:

На рис. 3 приведен упрощенный вариант принципиальной схемы экспериментальной установки индукционного нагрева(не показана система заряда емкости С).

Рис. 3. Упрошенный вариант принципиальной схемы экспериментальной установки индукционного нагрева
В данной схеме ключ K (рис. 1) заменен встречно-параллельно включенными тиристорами VS1, VS2, отпирающие сигналы на которые подаются от системы управления. Емкость С заменена емкостями С1, С2, С3 (количество емкостей показано условно), которые подключаются к схеме через ключи К1, К2, К3, позволяющие вручную менять величину разрядной емкости. Токовый сигнал снимается с помощью датчика тока, в качестве которого может быть использован низкоомный безындуктивный шунт или трансформатор тока, выполненный на ферритовом кольце. Кривая тока фиксируется с помощью осциллографа с памятью. Лучше всего использовать осциллограф, позволяющий осуществлять цифровую обработку зафиксированной кривой.
Проиллюстрируем процесс измерения параметров индуктора на модели, построенной в среде OrCAD 9.2 (рис. 4).

Рис. 4. Схема модели, иллюстрирующая определение параметров индуктора
Здесь применены тиристоры ТБ143-630-14, описываемые следующей моделью [3]:
.subckt TB143-630-14 anode gate cathode * «Typical» parameters X1 anode gate cathode Scr params: +Vdrm=1500v Vrrm=1500v Ih=500ma Vtm=2.0v Itm=1980 +dvdt=1e9 Igt=320ma Vgt=2.5v Ton=3.2u Toff=32us +Idrm=70ma * 01-6-4 Kurai. ends
Управление тиристорами осуществляется с помощью источников постоянного напряжения VDC, емкость С1 заряжена до напряжения 310 В (начальные условия). Параметры элементов приведены на рис. 4.
Результаты моделирования приведены на рис. 5.
На нижней осциллограмме приведена кривая тока через индуктор, а на верхней — сопротивление тиристоров VS1, VS2, полученное как частное от деления напряжения на тиристорах V(C1:2, VS1:Cathode) на ток I(R1). Обозначим его RT.
В соответствии с обозначениями, приведенными на рис. 2, и по осциллограммам, приведенным на рис. 5, заполним таблицу 1.

Рис. 5. Осциллограммы сопротивлений тиристоров и тока через индуктор, полученные на модели
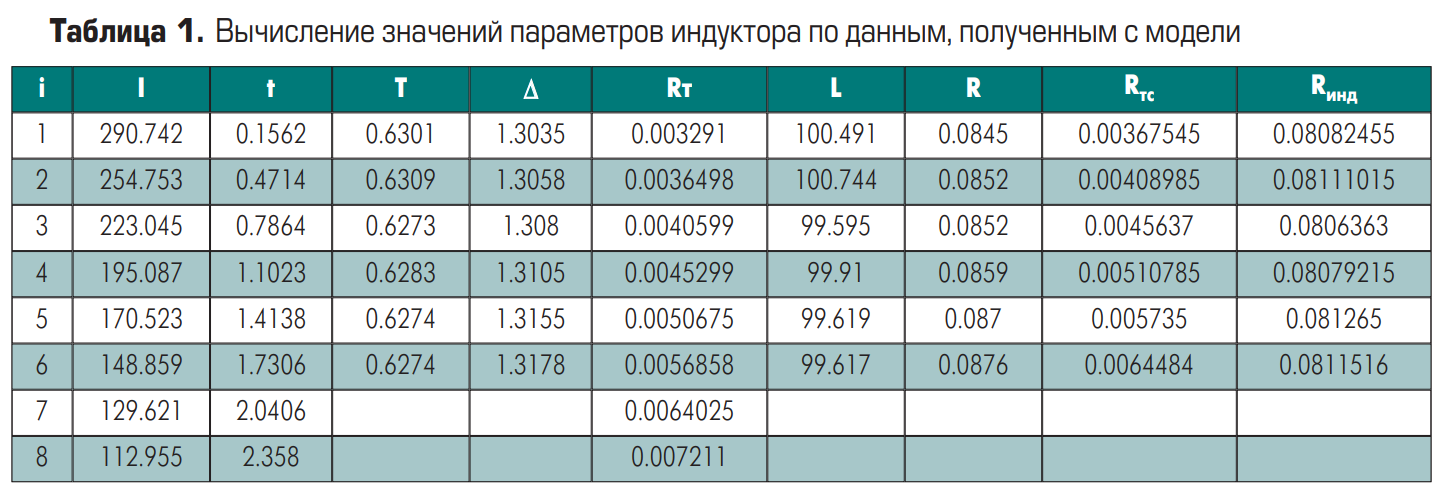
В таблице 1 в столбце I приведены i-е значения амплитуд токов (см. рис. 2), в столбце t — время в микросекундах ti, соответствующее i-му значению амплитуды тока, в столбце T — разница между ti+2 и ti, в столбце Δ — отношение Ii к Ii+2, в столбце RT — сопротивление тиристора в момент времени, соответствующий Ii, в столбце L — значение индуктивности индуктора Li, вычисленное по формуле (7), в столбце R — суммарное сопротивление Ri, вычисленное по формуле (8), в столбце RTC — среднее значение i-го и i+2-го сопротивлений тиристора, в столбце Rинд — сопротивление индуктора, равное разности между Ri и RТСi.
По табличным данным, средние значения вычисленных индуктивности и сопротивления составляют L = 99,996 мкГн, Rинд = 0,08096 Ом. Очевидно, что приведенный пример является нереальным, поскольку такая точность измерения на экспериментальной установке невозможна. Пример приведен для иллюстрации достоверности алгоритма вычисления.
Примем, что точность снятия информации с осциллографа— 10%. По таблице 1 с учетом случайного разброса параметров Ii и ti, исходя из предельно допустимого отклонения в 10%, построена таблица 2.

Средние значения полученных по таблице 2 значений индуктивности и сопротивления индуктора составляют L = 99,11 мкГн и Rинд = 0,0801 Ом. Для получения значений сопротивления R1, учитывающего потери в меди, необходимо провести вышеописанный эксперимент для индуктора, из которого удалено нагреваемое тело.
Некоторые соображения по зависимости изменения L, R1 и R2 от частоты и материала нагреваемого тела приведены в известной книге [1].
Для измерения параметров индуктора для каждого типа тиристора, применяемого в качестве ключевого элемента (см. схему на рис. 3), с помощью моделирования в среде OrCAD следует получить значения сопротивлений RTi в зависимости от токов Ii.
В таблице 3 такие значения приведены для тиристора ТБ143-630-14. В случае необходимости получения значений тока между приведенными значениями Ii используется линейная интерполяция.

Таким образом, методика экспериментального определения параметров индуктора сводится к следующему:
- 1. Необходимо изготовить экспериментальную установку в соответствии со схемой, приведенной на рис. 3. Количество подключаемых емкостей определяется диапазоном требуемых частот и измеряемыми параметрами индуктора. Для более точного подбора величины емкости рекомендуется использовать следующий ряд емкостей: 1; 2; 4; 8; 16; 32; 64… мкФ. Применение такого ряда позволяет получать любую величину емкости с точностью до 1 мкФ. Для питания схемы необходим блок питания, обеспечивающий получение плавно изменяемого напряжения на емкости. Фиксация кривой тока через индуктор (см. рис. 2) производится с применением осциллографа с памятью. Для повышения точности желательно наличие цифровой обработки кривой.
- Исходными данными для эксперимента являются рабочее напряжение U индуктора и частота f. По значению напряжения U определяется напряжение U0, до которого необходимо зарядить разрядную емкость. Путем подбора величины разрядной емкости находится частота, максимально близкая к заданной.
- По полученной осциллограмме определяются значения Ii и ti для максимально возможного i.
- Для зафиксированных значений Ii по таблице 3 с использованием в случае необходимости линейной интерполяции определяются значения RT.
- Производится расчет L и Rинд по формулам (7) и (8).
Полученные по приведенной методике параметры индуктора могут использоваться для определения его КПД, cosφ, а последовательная схема замещения с этими параметрами может применяться при моделировании системы индукционного нагрева.
- Бабат Г. И. Индукционный нагрев металлов и его промышленное применение. М.: Энергия. 1965.
- Rudnev V., Cook R., Loveless D., Black D. Induction Heat Treatment. Basic Principles, Computation, Coil Construction, and Design Consideration. Modern Power Supplies, Load Matching, Process Control and Monitoring. New York — Basel — Hong Kong. Marcel Dekker Inc. 1997.
- Болотовский Ю. И., Таназлы Г. И. OrCAD. Моделирование. «Поваренная» книга. М.: Солон-Пресс. 2005.
 13 мая, 2020
13 мая, 2020