
Программное обеспечение Test ATV для настройки и тестирования преобразователей частоты серии Altivar ATV61
Серия преобразователей частоты Altivar компании Schneider Electric пользуется заслуженной популярностью благодаря применению разнообразных законов управления двигателем и большим функциональным возможностям. Преобразователи частоты (ПЧ) Altivar предназначены для регулирования скорости асинхронных и синхронных двигателей и обеспечивают простое и быстрое программирование.
Программирование ПЧ — это приспособление их к конкретной прикладной задаче. Его производят путем изменения значений настраиваемых параметров (номинальная частота питания двигателя, частота коммутации, длительность разгона и торможения, закон управления двигателем, назначение логических входов и т. п.). От правильной настройки преобразователя будет зависеть эффективность и ресурс работы ПЧ и всего электропривода в целом. Для этих целей компания-производитель предлагает свое ПО, с помощью которого на ПК можно установить необходимую конфигурацию и сохранить ее в памяти контроллера ПЧ. Но возникает необходимость в альтернативном программном обеспечении для потребности узконаправленных задач, например для наблюдения за состоянием привода в различных режимах работы преобразователя частоты и сохранением полученных результатов мониторинга для дальнейшего использования в отключенном от преобразователя состоянии. Полученные таким образом динамические данные удобно представить в виде графического отображения, используя виртуальный осциллограф. Для этих целей было создано ПО Test ATV. В программе реализован виртуальный осциллограф, предназначенный для визуального отображения динамических процессов, происходящих в приводе. С его помощью можно легко определить характер нагрузочного режима преобразователя частоты. Также в Test ATV есть возможность редактировать основные параметры ПЧ Altivar 61. Программа представляет собой обычное Windows-приложение, которое через коммуникационный порт посылает запросы в контроллер ПЧ Altivar 61. Дискретное время обмена информацией (запрос/ответ) составляет не менее 50 мс. Протокол обмена данными — Modbus RTU, а интерфейс — RS485. Программа Test ATV не требует значительных ресурсов ПК. Для работы необходим дистрибутив Microsoft.NET Framework 3.5 или выше. Test ATV имеет возможности:
- ввод параметров двигателя;
- изменение настроек параметров в ПЧ;
- сохранение конфигурации параметров на диске в виде файла;
- визуализация внутренних переменных с помощью виртуального осциллографа;
- сохранение массива динамических значений параметров в течение выбранного времени в виде файла для последующего анализа;
- настройка коммуникационных параметров;
- печать основных параметров в виде протокола отчетности с использованием выбранного рисунка отображаемых графиков.
ПО представлено на русском языке. Подключение устройства к компьютеру производится с помощью кабеля связи, через переходник USB-RS485, соединяющий соответствующий разъем на панели устройства и USB-порт компьютера.
Внешний вид главного окна программы Test ATV содержит коллекцию вкладок с элементами управления и компонентами. На панели инструментов расположены кнопки, дублирующие команды меню «Файл». Доступно два варианта сохранения настроек: в виде файла конфигурации *.yts и в виде бинарного файла, содержащего динамические данные осциллографа, *.bin. На панели конфигурации (рис. 1) отображаются основные параметры ПЧ.

Рис. 1. Основные параметры ПЧ на панели конфигурации
После завершения необходимых настроек их можно сохранить на диске, выбрав пункт меню «Сохранить проект», или сохранить записанные динамические данные, выбрав команду в меню «Сохранить тест». Ранее сохраненные файлы загружаются в Test ATV командой Открыть проект или Открыть тест. Панель изменяющихся параметров преобразователя показана на рис. 2.

Рис. 2. Панель изменяющихся параметров преобразователя
На панели ошибок (рис. 3) отображаются последние неисправности и некоторые значения параметров, которые были зафиксированы на момент отказа.
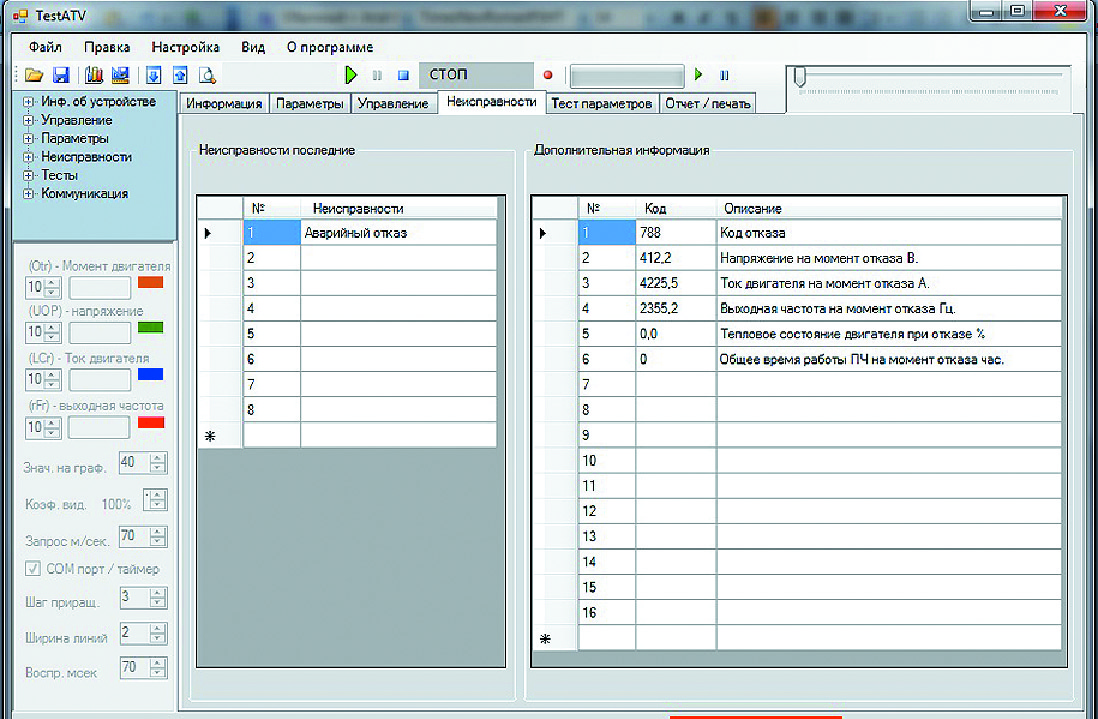
Рис. 3. Панель ошибок
Основным инструментом Test ATV является виртуальный осциллограф. Он предназначен для визуализации внутренних переменных ПЧ в функции времени. В поле осциллографа на осях X и Y строятся графики, где отображаются значения четырех параметров:
- выходная частота, Гц;
- ток двигателя, А;
- напряжение на выводах двигателя, В;
- текущий момент двигателя, %.
При открытии вкладки осциллографа становится активной одноименная панель настроек, на которой представляются в цифровом виде текущие значения полученных параметров и установленные значения смещения по оси Y. Управление осциллографом осуществляется с помощью кнопок «Включить тест» и «Общий стоп», расположенных на панели инструментов. При нажатии кнопок «Записать тест» и «Включить тест» значения текущих параметров будут сохранены в массиве данных, который после окончания записи можно записать на жесткий диск в виде файла с расширением *.bin. Также на этой вкладке можно воспользоваться проигрывателем для воспроизведения ранее записанных значений параметров ПЧ. В режиме воспроизведения сохраненных динамических данных включается индикатор записанного сигнала и курсор текущей позиции. Если необходимо наблюдать отдельную часть осциллограммы, курсор индикатора «позиция» следует переместить в нужную точку. Примером использования программы Test ATV и виртуального осциллографа может служить отслеживание динамической и механической характеристики асинхронного двигателя или зависимости скорости вращения двигателя от момента на валу. Пример пусковых характеристик асинхронного двигателя 200 кВт в приводе насоса показан на рис. 4 и 5.

Рис. 4. Закон управления двигателем U/F (по двум точкам)

Рис. 5. Закон управления векторный без датчика обратной связи
На графиках видно, что в момент пуска с установленным векторным режимом управления двигателем без датчика обратной связи (рис. 5) не создается значительный момент по сравнению с простым скалярным управлением U/F, показанным на рис.4. Значения параметров преобразователя и осциллограммы, отображаемые в окне осциллографа, можно распечатать в виде протокола, который создается автоматически при нажатии кнопки «Печать» (рис. 6). Также имеется возможность предварительного просмотра выводимого на печать документа.

Рис. 6. Значения параметров преобразователя и осциллограммы
Программа Test ATV не создавалась как полная альтернатива или замена программного обеспечения производителя Altivar 61, а как дополнительный инструмент в мониторинге и настройке ПЧ.
 27 сентября, 2007
27 сентября, 2007 20 апреля, 2020
20 апреля, 2020
как приобрести ПО Test ATV ?