
Алгоритм частотно-токового управления асинхронным двигателем в замкнутом электроприводе
Введение
При регулировании токов статора двигателя, управляемого от автономного инвертора, охваченного отрицательными обратными связями по токам фаз статора [1, 2], можно пренебречь отличием токов статорной обмотки от заданных значений. Это позволяет существенно уменьшить инерционность двигателя, связанную с индуктивностью обмоток статора, и при достаточно плавных изменениях заданных частоты и амплитуды токов статора считать источником питания АД трехфазный управляемый генератор переменного тока, регулирующий мгновенные значения токов статора. В этом случае управляющими воздействиями для АД являются токи статора. Таким образом, можно использовать более простой алгоритм управления, создающий в замкнутом по скорости электроприводе максимальные по величине ускорения при разгоне и торможении, а также минимальные токи статора, обеспечивающие необходимый электромагнитный момент АД в установившемся режиме, по сравнению с известными векторными и скалярными способами управления АД [3–5].
Алгоритм управления замкнутого электропривода с асинхронным двигателем
На рис. 1 представлена математическая модель замкнутой нереверсивной системы регулирования частоты вращения АД, управляемого токами статора.
Схема на рис. 1 относится к случаю одной пары полюсов АД. Система отличается от традиционных векторных и скалярных систем алгоритмом управления. Основное отличие состоит в привязке частоты токов статора ω к частоте вращения ротора АД и регулировании частоты вращения путем изменения величины токов статора.

Рис. 1. Математическая модель замкнутой нереверсивной системы регулирования частоты вращения АД, управляемого токами статора
В зависимости от знака отклонения частоты вращения АД Ω от заданного ее значения ΩЗ (∆Ω = ΩЗ – Ω) частота токов статора увеличивается или уменьшается на частоту токов ротора, соответствующую экстремальному значению электромагнитного момента АД Mr, равную r/LЭ, LЭ = LN/2, где r и L — активное сопротивление и индуктивность рамки, образованной диаметрально противоположными стержнями обмотки ротора, 2N — число стержней обмотки. Таким образом

Амплитуда токов статора регулируется по замкнутому контуру пропорциональным регулятором с достаточно большим коэффициентом усиления K (рис. 1). Благодаря привязке частоты токов статора к скорости АД регулятор амплитуды токов устанавливает наименьшую возможную амплитуду токов при данном моменте нагрузки MН.
Эта же особенность построения системы регулирования частоты вращения АД позволяет в переходных режимах в зоне насыщения использовать максимально возможный электромагнитный момент двигателя, отвечающий уровню ограничения амплитуды токов якоря Immax и частоте токов в роторе, соответствующей экстремуму электромагнитного момента АД, как в системах со стабилизацией потока двигателя.
Для исследования предложенной замкнутой схемы управления частотой вращения АД методом математического моделирования необходима его цифровая модель.
Цифровые модели асинхронного двигателя
На рис. 2 представлена цифровая модель АД, управляемого токами статора, с одной короткозамкнутой рамкой на роторе. Модель построена в системе Matlab 6.5 Simulink 5 по дифференциальным уравнениям ненасыщенного АД, полученным в статье [6] (система уравнений (13)):
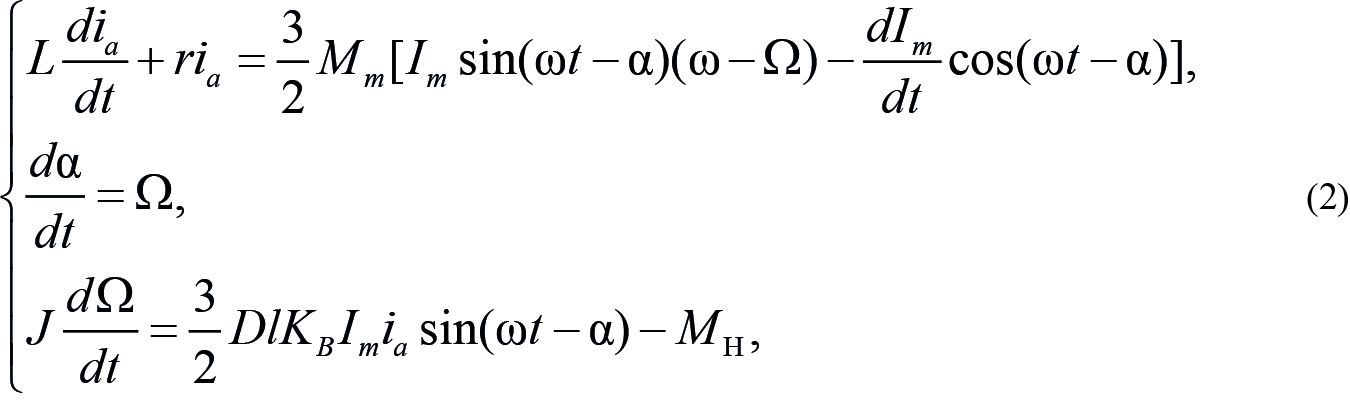
где Mm — максимальная взаимоиндуктивность между обмоткой статора и рамкой ротора; l и D — длина и диаметр ротора АД; KB — коэффициент пропорциональности между током обмотки статора и магнитной индукцией на ее оси в воздушном зазоре; J — суммарный момент инерции АД и нагрузки; α — угол поворота ротора.
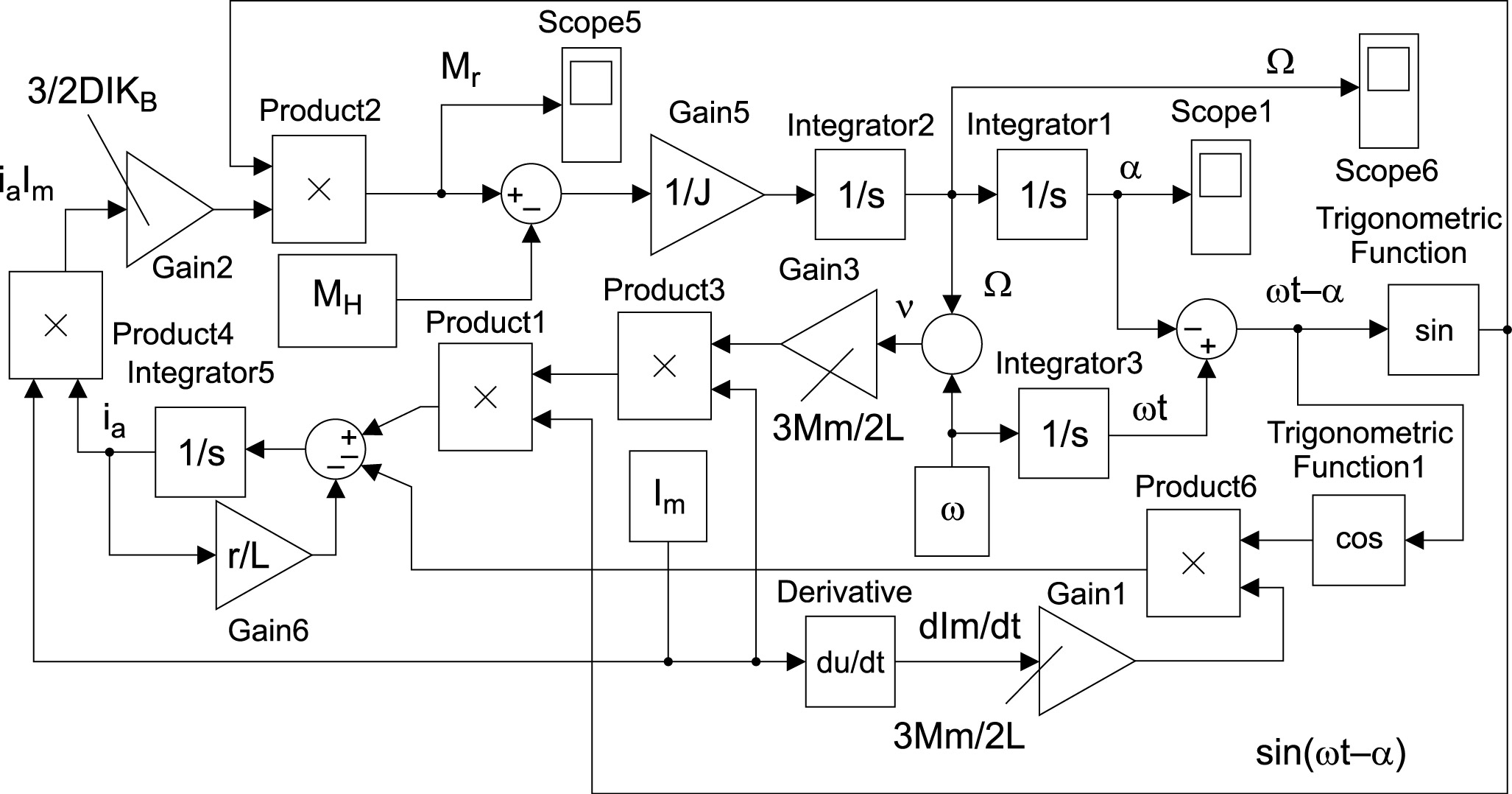
Рис. 2. Цифровая модель АД с одной короткозамкнутой рамкой на роторе при управлении токами статора
Временные диаграммы абсолютного скольжения (разности синхронной частоты вращения и частоты вращения ротора) в рад/с, тока ротора ia в А и разности электромагнитного момента и момента нагрузки Mr – MН в Н·м при скачкообразном приложении MН к АД, находящемуся в режиме идеального холостого хода (Ω = ω), представлены на рис. 3 и 4. Параметры гипотетического АД: l = 0,6 м, D = 0,4 м, KB = 0,05 Тл/А, Mm/L = 20, r/L = 10p, ω = 100pc-1, Im = 10 А. Расчетное значение максимальной постоянной составляющей электромагнитного момента —Mrmax =27 Н·м, J = 3,84p кгм2.

Рис. 3. Переходной процесс при приложении к АД, находящемуся в режиме идеального холостого хода, тормозящего момента в 1 Н•м
На рис. 3 и 4 представлены процессы при MН = 1 и 0,5 Н·м соответственно. Их анализ показывает, что при одной рамке на роторе в установившемся режиме частота колебаний момента нагрузки и абсолютного скольжения, а значит, и частоты вращения ротора вдвое выше частоты несинусоидального тока ротора.

Рис. 4. Переходной процесс при приложении к АД, находящемуся в режиме идеального холостого хода, тормозящего момента в 0,5 Н•м
При большом числе стержней ротора цифровая модель АД оказывается весьма громоздкой. Для ее упрощения желательна декомпозиция описывающей ее системы дифференциальных уравнений. Полученный в статье [6] результат для установившегося режима при основном способе управления, определяемого выражениями:
![]()
и произвольном числе стержней 2N «беличьей клетки» ротора позволяет предположить, что возможна декомпозиция системы уравнений электромагнитного равновесия [6, уравнение (27’)]:

где Mkj = Lcos((k – j)δ) — взаимоиндуктивность между рамками ротора, k, j = ![]() k ≠ j, δ = π/N.
k ≠ j, δ = π/N.
Положим, что система уравнений (3) допускает декомпозицию к виду:

Решение системы дифференциальных уравнений (4) в форме преобразования Лапласа имеет вид:

где
![]()
Для подтверждения справедливости декомпозиции системы (3) доказано, что решение (5) системы (4) является решением и системы (3).
Возможность декомпозиции существенно упрощает построение цифровой модели АД, слишком громоздкой при больших значениях N.
На рис. 5 для простоты представлена цифровая модель АД, управляемого токами статора, при трех рамках на роторе (2N = 6).
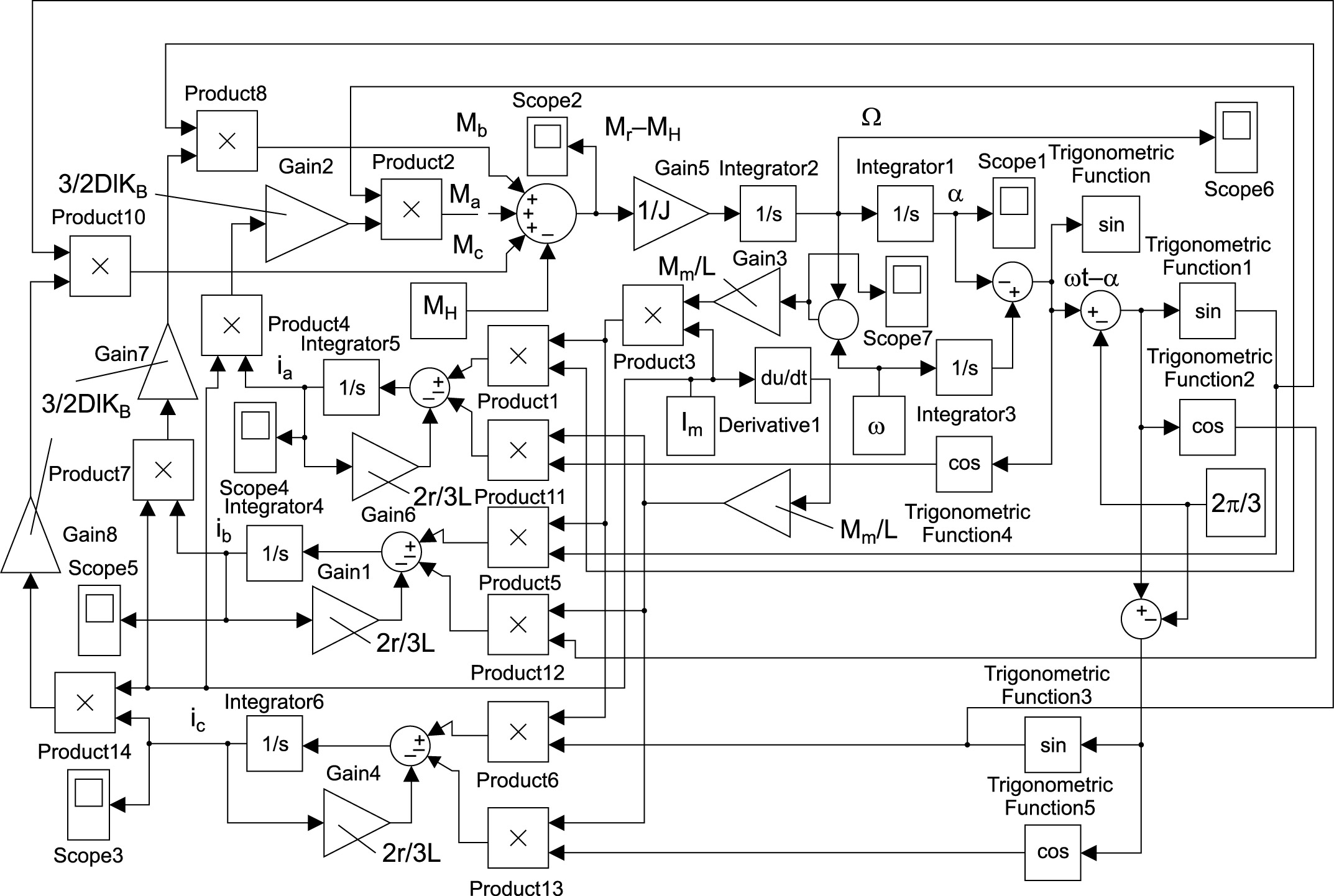
Рис. 5. Цифровая модель АД, управляемого токами статора, при трех рамках на роторе (2N = 6)
Модель построена в системе Matlab 6.5 Simulink 5 по полученной в статье [6] системе уравнений:

На рис. 6 представлен процесс отработки системы регулирования частоты вращения АД (рис. 1) ступенчато изменяющегося заданного значения частоты вращения (ΩЗ = 20π1(t) – 10π1(t – 7)) рад/с при моменте нагрузки MН = 0. После скачков ΩЗ благодаря постоянной частоте токов ротора (абсолютного скольжения) v = ΩЗ – Ω, соответствующей экстремуму электромагнитного момента АД, процесс изменения частоты вращения АД Ω происходит с максимально возможным при заданном ограничении амплитуды токов статора электромагнитным вращающим моментом АД Mr.

Рис. 6. Процесс отработки ступенчато изменяющегося заданного значения частоты вращения при MН = 0
Для простоты модели число рамок на роторе принято равным 3. Амплитуда токов статора ограничена значением Inmax = 20 √2 A. Остальные гипотетические параметры АД оставлены без изменения. Расчетные значения экстремума Mr составляют Mrэ= 216 Н·м. Пропорциональный регулятор заданной амплитуды токов статора имеет значение K = 20 Ас/рад.
Заметим, что после скачка задающего воздействия процесс нарастания Mr происходит в модели при скачкообразном изменении токов статора, физически не реализуемом.
На рис. 7 представлен процесс при том же входном воздействии ΩЗ и MH = 40 Н·м. В установившихся режимах ошибка управления зависит от момента нагрузки и составляет ∆Ω = 0,607 рад/с. Увеличение Kв в пять раз до K = 100 Ас/рад позволяет уменьшить ∆Ω также в пять раз. Использование ПИ-регулятора вместо П-регулятора позволяет снизить ∆Ω до нуля.

Рис. 7. Процесс отработки ступенчато изменяющегося заданного значения частоты вращения при MH = 40 Н•м
Выводы
- Привязка частоты токов статора к частоте вращения ротора позволяет АД работать при постоянной частоте токов ротора, соответствующей экстремуму суммарного электромагнитного вращающего момента. Регулирование вращающего момента при этом происходит за счет регулирования амплитуды токов статора, что позволяет получать необходимый вращающий момент при наименьшей амплитуде токов статора.
- При больших скачкообразных изменениях заданной частоты вращения АД переходные процессы установления нового значения скорости происходят с максимальным значением вращающего (тормозящего) электромагнитного момента.
- Моделирование подтвердило пульсацию вращающего момента одиночной рамки ротора с частотой, превышающей частоту токов ротора в два раза.
- Доказана возможность декомпозиции системы уравнений электромагнитного равновесия для токов ротора.
- Коршунов А. И. Непрерывная модель трехфазного контура регулирования токов статора синхронного двигателя // Изв. вузов. Приборостроение. 2012. № 9.
- Коршунов А. И. Анализ устойчивости и точности широтно-импульсного регулятора тока трехфазного автономного инвертора // Электротехника. 2013. № 6.
- Попов Д. А. О частотном пуске асинхронных гиродвигателей // Электричество.1968. № 8.
- Иванов В. Л., Тимофеева Л. И., Гаврилов П. Д. К частотному пуску электродвигателей забойных машин // Изв. вузов. Электромеханика. 1973. № 4.
- Булгаков А. А. Частотное управление асинхронными двигателями. М.: Наука, 1966.
- Коршунов А. И. Математическая модель асинхронного короткозамкнутого двигателя, управляемого токами статора // Силовая электроника. 2019. № 2.
 5 августа, 2021
5 августа, 2021 19 сентября, 2007
19 сентября, 2007 28 июля, 2009
28 июля, 2009