
Математическая модель асинхронного короткозамкнутого двигателя, управляемого токами статора
Введение
Широкое распространение асинхронного трехфазного короткозамкнутого двигателя (АД) в нерегулируемом электроприводе (ЭП) давно уже привело практически к полному вытеснению им двигателей постоянного тока (ДПТ), за исключением редких случаев питания от сети постоянного тока. Развитие силовой полупроводниковой техники позволило и в регулируемом ЭП заменить ДПТ на частотно регулируемый АД. Поэтому тема статьи может показаться не актуальной. Однако возрастающие требования к динамике ЭП с АД неизбежно потребуют уточнения используемой при его расчете математической модели двигателя. Например, понадобится учитывать влияние изменения мгновенных значений частоты вращения ротора на электромагнитные процессы в АД. Желательно иметь модель, удобную для анализа ЭП традиционными методами теории автоматического управления. Кроме того, следует учесть существенные особенности выбранного способа управления двигателем. Так, при регулировании токов статора двигателя, управляемого от автономного инвертора, охваченного отрицательными обратными связями по токам фаз статора [1, 2], можно пренебречь отличием токов статорной обмотки от заданных значений. Это позволяет при достаточно плавных изменениях заданных частоты и амплитуды токов статора считать источником питания АД трехфазный управляемый генератор переменного тока, регулирующий мгновенные значения токов статора, которые являются управляющими воздействиями для АД.
Вывод уравнений АД
При выводе уравнений АД примем следующие обычные допущения:
- магнитная цепь двигателя не насыщена;
- ток каждой фазы статора (A, B, C) вызывает в зазоре составляющую магнитной индукции, распределенную по гармоническому закону:
![]()
где iq — ток фазы q, aq — угол, отсчитываемый от оси фазной обмотки в направлении, принятом за положительное, KB = const;
- роторная обмотка («беличья клетка») содержит четное число стержней, равномерно распределенных вдоль боковой поверхности ротора;
- роторная обмотка состоит из отдельных одновитковых короткозамкнутых рамок, образованных каждыми двумя стержнями «беличьей клетки», лежащими в одной плоскости с осью ротора. Это допущение можно оправдать соображениями симметрии, позволяющими считать напряжение между верхними и нижним концами стержней равным нулю и пренебречь активным и индуктивным сопротивлением элементов замыкающего кольца;
- взаимоиндуктивность между обмоткой статора и рамкой ротора зависит от косинуса угла между их осями, что вытекает из допущения (1);
- пренебрегаем явлениями на концах ротора;
- не учитываем паразитные моменты асинхронного двигателя [3];
- АД имеет одну пару полюсов. Допустим вначале, что обмотка ротора состоит из трех рамок, сдвинутых в пространстве на угол 2p/3 (120°). На рис. 1а, изображающем поперечное сечение АД обмотки статора, обозначены одним витком: AX, BY, CZ, как и одновитковые рамки ротора: ax, by, cz.
Состояние АД как динамической системы определяется тремя токами статора: iA, iB, iC, тремя токами ротора: iа, ib, iс, углом поворота ротора a и частотой его вращения W = da/dt. В действительности условие
iA + iB + iC = 0 уменьшает число независимых токов статора до 2.
Положительное направление токов на рис. 1 обозначено крестиками и точками. Угол поворота ротора отсчитывается от оси обмотки фазы A статора до оси произвольно выбранной рамки ротора, обозначенной буквами ax, против часовой стрелки.

Рис. 1. Поперечное сечение АД
Для определения мгновенного значения электромагнитного вращающего момента, действующего на ротор Mr, достаточно знать мгновенные значения токов статора и ротора и угол поворота ротора.
Для определения Mr воспользуемся подходом, аналогичным использованному при определении вращающего момента синхронного двигателя с постоянными магнитами на роторе (СДПМ) [4, 5]. Вначале определим вращающий момент каждой рамки ротора, вызванный взаимодействием ее тока с магнитным полем, создаваемым токами обмоток статора. Сумма вращающих моментов рамок ротора даст значение Mr.
Рассмотрим момент, действующий на рамку ax. Если положительное направление оси обмотки статора связано с положительным направлением тока правилом правого винта, при положительном токе обмотки магнитная индукция в точке зазора, совпадающей с положительной полуосью обмотки, направлена от ротора к статору, считается положительной и имеет максимальное значение. В противоположной точке зазора индукция направлена от статора к ротору, считается отрицательной и имеет минимальное значение.
Выберем положительное направление оси рамки ротора, связанное с положительным направлением тока в ней, также правилом правого винта.
Нетрудно убедиться, что при положительных токах в фазе статора и в рамке ротора силы Ампера, действующие на активные проводники рамки, то есть стержни «беличьей клетки», создают вращающий момент, направленный противоположно угловому отклонению оси рамки ротора от оси обмотки статора (рис. 1б, в). При совпадении осей вращающий момент рамки равен нулю вследствие нулевой индукции в соответствующих точках зазора.
Таким образом, вращающий момент, создаваемый взаимодействием составляющей магнитного поля в воздушном зазоре АД, вызванной током обмотки фазы q статора, с током рамки k ротора, определяется выражением:
![]()
где D — диаметр ротора; l — длина активной стороны рамки (длина стержня «беличьей клетки»;
Bq = KBiqcosaq = KBiqcos(p/2+aqk) = –KBiqsin(aqk); aqk — угол между осями обмотки статора и рамки ротора, отсчитываемый от оси обмотки в направлении, принятом за положительное (рис. 1б, в).
Полагая, что оси статорных обмоток B и C сдвинуты относительно оси обмотки A в направлении, принятом за положительное, на угол 2p/3 и 4p/3 соответственно, как и оси рамок by и cz относительно оси рамки ax, можно записать выражения моментов, действующих на рамки ротора:

Суммарный электромагнитный момент, действующий на ротор, равен их сумме:
Mr = Ma+Mb+Mc. (4)
Электромагнитные процессы в рамках ротора описывает система дифференциальных уравнений, составленных по второму закону Кирхгоффа:
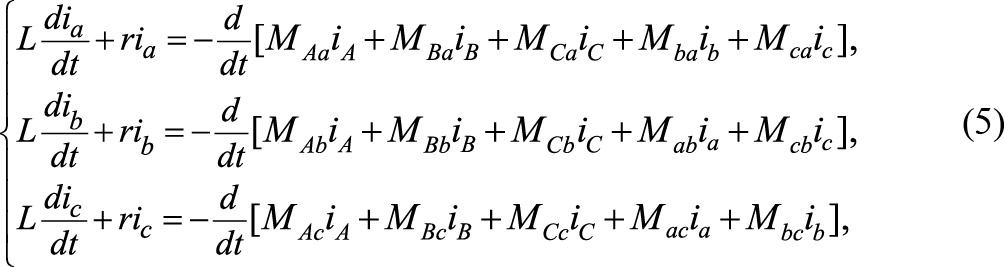
где L — индуктивность рамки; r — ее активное сопротивление; Mqk — взаимоиндуктивность обмотки q статора и рамки k ротора; q = A, B, C; k = a, b, c; Mk1k2 — взаимоиндуктивность рамок k1 и k2; k1 = a, b, c; k2 = a, b, c; k1 ≠ k2.
Взаимоиндуктивность обмотки q статора и рамки k ротора при выбранных положительных направлениях токов обмоток и рамок и их осей зависит от угла между их осями согласно выражению:
Mqk = Mmcosaqk, (6)
где aqk — угол между осями обмотки статора и рамки ротора, отсчитываемый от оси обмотки в направлении, принятом за положительное; Mm — максимальная взаимоиндуктивность, соответствующая совпадению осей обмотки и рамки.
Вследствие симметрии взаимоиндуктивность между рамками ротора одинакова. Полагая магнитную индукцию поля, создаваемого током рамки, распределенной в зазоре по гармоническому закону, можно считать:
Mk1k2 = M = Lcos2π/3 = –L/2. (7)
Дифференцирование потокосцепления обмотки статора q c рамкой k ротора дает:
![]()
где q = A, B, C; k = a, b, c.
С учетом одинаковой частоты вращения рамок ротора, равной скорости вращения ротора:

Используя выражения (7), (8) и (9), с учетом геометрических соотношений (рис. 1), систему уравнений (5) можно преобразовать к виду:

Поскольку сумма правых частей уравнений системы уравнений (10) равна нулю, допустима ее декомпозиция:

Математическая модель АД, управляемого токами статора, описывается уравнениями (3), (4), (10′) и уравнением движения ротора:
![]()
где J — суммарный момент инерции двигателя и нагрузки; MH — момент нагрузки.
Основной способ управления АД — изменение амплитуды и частоты токов статора, образующих симметричную трехфазную систему:
![]()
Подстановка выражений (12) в формулы (3) и (10′) дает соответственно:


Определенный интерес представляет рассмотрение случая одной рамки на роторе, описываемого системой дифференциальных уравнений:

первое и третье из которых нелинейные.
Желательным стационарным режимом работы ЭП при постоянном моменте нагрузки и постоянных управляющих воздействиях
MH = const, Im = const, ω = const
является режим постоянной частоты вращения ротора:
![]()
Оказывается, что существование стационарного решения системы уравнений (13), соответствующего условию (14), невозможно. Действительно, подстановка условия (14) в систему (13) дает:

где абсолютное скольжение ν = ω – W = const.
Стационарное решение уравнения (15), как известно из электротехники, имеет вид:

Подстановка выражения (17) в левую часть формулы (16) дает:
![]()
Первое слагаемое в результате постоянно и пропорционально cosφ, а второе слагаемое — гармоническая функция частоты 2ν.
Таким образом, при постоянной частоте вращения в случае одной рамки на роторе АД развивает пульсирующий вращающий момент, что и доказывает невозможность существования стационарного режима с постоянной частотой вращения ротора (13).
В классической литературе [6] также отмечается существование пульсирующей составляющей вращающего момента АД, но частота пульсаций равна удвоенной частоте «синхронной угловой скорости ω1» и не зависит от частоты вращения ротора.
При достаточно большом моменте инерции J (11) можно считать частоту вращения Ω практически постоянной и учитывать только постоянную составляющую электромагнитного момента

Подстановка в формулу (19):

дает

Характер полученной зависимости постоянной составляющей вращающего момента одной рамки ротора АД от частоты вращения ротора совпадает с известной классической зависимостью [3]. При ν = r/L постоянная составляющая электромагнитного момента рамки имеет максимальное значение

С уменьшением момента инерции J и частоты тока ротора ia пульсации частоты вращения возрастают, вызывая увеличение отклонения формы тока ротора от синусоидальной. Исследовать это явление проще всего на математической модели, построенной во второй части статьи.
Допустим, в рассматриваемом случае трех рамок на роторе АД выполняется условие (14), тогда система уравнений (10») имеет вид:
![]()
позволяющий легко найти ее решение:

где

Подстановкой выражений (22) в выражения (3′) получаем:

Суммируя моменты, создаваемые тремя рамками, сдвинутыми в пространстве на 2π/3, получаем уничтожение пульсирующих составляющих, сдвинутых по фазе также на 2π/3. Вследствие этого суммарный электромагнитный момент трех рамок ротора не имеет пульсирующей составляющей и определяется с учетом (7) выражением:

отличающимся от постоянной составляющей момента одной рамки только утроенным значением числового коэффициента и учетом взаимоиндуктивности рамок

В общем случае число рамок на роторе равно N >> 3 (2N — число стержней «беличьей клетки» ротора). Соседние рамки сдвинуты на угол
![]()
Обозначим a — угол между осью обмотки фазы A статора и осью рамки ротора, принятой за первую, отсчитываемый от оси обмотки фазы A в положительном направлении. Тогда угол между осью обмотки фазы A и осью k-й рамки ротора равен a+(k — 1)d.
Систему выражений для вращающих моментов рамок ротора, аналогичную системе выражений (3), можно записать в виде

где ik — ток k-й рамки.
Электромагнитные процессы в роторе описывает система дифференциальных уравнений, аналогичных системе (5):

Подстановка выражений (12) в формулы (26) и (27) дает соответственно:

где Mkj = Mcos((j — k)d), M = L.
Положим, что при МН = const возможно существование стационарного режима, при котором выполняются условия (14), а токи ротора представляют собой гармонические функции с частотой ν = ω – Ω = const (16). Из соображений симметрии можно считать сдвиг по фазе между токами соседних рамок ротора равным δ, а их амплитуды одинаковыми, то есть:
![]()
Для стационарного режима согласно известному методу комплексных амплитуд [7] определены параметры стационарного решения (28) системы уравнений (27′):

Подстановка выражений (28) с учетом значений параметров (29) и условия (14) в выражения вращающих моментов рамок (26′), а затем их суммирование дает вследствие взаимного уничтожения пульсирующих составляющих моментов рамок ротора постоянный в стационарном режиме электромагнитный вращающий момент ротора:

Исследование выражения (30) на экстремум дает две симметричные стационарные точки и соответствующие им симметричные экстремальные значения:
![]()
Из выражения (31) очевидно, что экстремальные значения не зависят от числа N одинаковых одновитковых рамок, симметрично расположенных на роторе АД.
Пусковой момент АД c учетом wLN >> r имеет значение:

возрастающее с уменьшением числа N одинаковых одновитковых рамок.
При одинаковых синхронной скорости и моменте нагрузки при большем числе N АД будет иметь большую скорость и, следовательно, развивать большую механическую мощность.
Полученный результат для установившегося режима при основном способе управления, определяемого выражениями (12), и произвольном числе стержней 2N «беличьей клетки» ротора позволяет предположить, что возможна декомпозиция системы уравнений электромагнитного равновесия (29′), как и в рассмотренном выше частном случае 2N = 6.
Выводы
- Построенная математическая модель АД корректна при достаточно плавных изменениях заданной частоты и амплитуды токов статора, отрабатываемых трехфазным контуром регулирования токов статора практически без ошибки.
- Анализ установившихся режимов АД показал, что одиночная замкнутая рамка при постоянной частоте вращения ротора создает пульсирующий электромагнитный вращающий момент.
- Суммарный электромагнитный вращающий момент нескольких рамок, равномерно распределенных на роторе АД, не имеет пульсирующей составляющей, поскольку пульсирующие составляющие моментов рамок взаимно уничтожаются.
- Экстремальные значения суммарного электромагнитного вращающего момента нескольких рамок не зависят от их числа.
- Увеличение числа рамок снижает частоту токов ротора, соответствующую экстремуму суммарного электромагнитного вращающего момента, то есть увеличивает жесткость рабочей части механической характеристики АД.
- Коршунов А. И. Непрерывная модель трехфазного контура регулирования токов статора синхронного двигателя // Изв. вузов. Приборостроение. 2012. № 9.
- Коршунов А. И. Анализ устойчивости и точности широтно-импульсного регулятора тока трехфазного автономного инвертора // Электротехника. 2013. № 6.
- Костенко М. П., Пиотровский Л. М. Электрические машины. Ч. 2. Машины переменного тока. Энергия, 1973.
- Коршунов А. И. Построение математической модели синхронного двигателя с постоянными магнитами на роторе // Электротехника. 2009. № 1.
- Коршунов А. И. Электромагнитный момент синхронного двигателя с постоянными магнитами // Изв. вузов. Приборостроение. 2015. Т. 58. № 1.
- Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. Госэнергоиздат, 1963.
- Нейман Л. Р., Демирчян К. С. Теоретические основы электротехники. Ч. 2. Теория линейных электрических цепей. Энергия, 1967.
 5 сентября, 2011
5 сентября, 2011