
Охлаждение приборов силовой электроники в сложных условиях эксплуатации
Основные положения
Эффективность работы пассивных систем охлаждения зависит от температуры окружающего воздуха, в то время как активные устройства не имеют жесткого ограничения по этому параметру. В промышленности более всего распространены два типа подобных систем — термоэлектрические и компрессорные, проводятся также испытания термоакустических охладителей, предназначенных для работы в космосе. Основные преимущества и недостатки различных технологий отвода тепла представлены в таблице 1.
|
Тип охлаждения |
Преимущества |
Недостатки |
Область применения |
|
Принудительное воздушное |
Низкая цена, отсутствие утечек. |
Большой объем, необходимо распределение тепла, высокое тепловое сопротивление, акустические шумы. |
Практически во всех областях электроники. |
|
Жидкостное |
Малый объем, гибкая конфигурация, низкое тепловое сопротивление, малый уровень шумов. |
Необходим компрессор, возможность утечек, |
Лазерные диоды, силовая электроника. |
|
Тепловые трубы |
Малый объем, низкое тепловое сопротивление, малый уровень шумов. |
Ограниченная теплонесущая способность, высокая цена, сложная конструкция. |
Портативные компьютеры, силовая электроника, космос. |
|
Компрессорное |
Малый объем, низкое тепловое сопротивление, |
Высокая цена, сложная конструкция, акустические шумы. |
Экспериментальные системы, кондиционирование. |
|
Термоэлектрическое |
Малый объем, низкое тепловое сопротивление, |
Ограниченная теплонесущая способность, низкая эффективность. |
Оптоэлектроника. |
|
Термоакустическое |
Низкое тепловое сопротивление, нет зависимости |
Отсутствуют разработанные промышленные технологии. |
Экспериментальные системы для космоса. |
Тепло, генерируемое силовыми кристаллами, рассеивается в окружающей среде с помощью радиаторов, имеющих высокую площадь поверхности для эффективного излучения и конвекции. Изолированные полупроводниковые компоненты могут размещаться на общем теплостоке, в качестве которого в ряде случаев используются конструктивные части преобразователя (корпус, шасси). Тепло из радиатора удаляется в охлаждающую среду непосредственно (за счет его теплопроводности) или с помощью теплоносителя. В качестве охлаждающей среды используется воздух, вода, антифриз или масло.
Тепловая модель охлаждающей системы
Поведение теплоотвода в системе охлаждения описывается следующим выражением:
Q = a × A × ΔT = Ptot.
Данная формула позволяет определить тепловое сопротивление, являющееся важнейшей характеристикой радиатора:
Rth(s–a) = ΔT/Ptot = 1/(a × A),
где Q — количество рассеянного тепла, a — коэффициент теплопередачи, А — эффективная площадь поверхности.
Температура Ts, необходимая для расчета градиента ΔT(s–a), измеряется в определенной точке теплостока (как правило, в центре), и величина Rth(s–a) всегда относится к конкретному положению сенсора. Использование другого положения термодатчика даст, соответственно, отличное от этого значение теплового сопротивления, подробно этот вопрос рассмотрен в [2]. Во многих случаях для упрощения анализа предполагается, что температура равномерно распределена по телу радиатора и сопротивление Rth(s–a) одинаково для всех источников, расположенных на одном теплостоке.
Как видно из приведенного выше выражения, величина Rth снижается с ростом активной площади радиатора А, определяемой линейными размерами и количеством ребер. Отметим, что увеличение площади за счет оребрения не должно препятствовать свободной циркуляции воздуха, снижать скорость потока и коэффициент теплопередачи a. Сказанное поясняет разницу конструкций радиаторов, предназначенных для режимов естественного и принудительного охлаждения. При росте мощности рассеяния улучшаются условия проникновения тепла, а его равномерное распределение и увеличение площади излучения Aeff делают работу радиатора более эффективной, что эквивалентно снижению Rth(s–a). Образование вихревых потоков охлаждающего воздуха или жидкости позволяет повысить значение a, что также вносит свой вклад в уменьшение теплового сопротивления.
Поведение радиатора может быть описано с помощью эквивалентной RC-цепи, где R — тепловое сопротивление Rth(s–a) или Zth(s–a), а С — теплоемкость. Однако при кратковременных всплесках рассеиваемой мощности характеристика Zth(s–a) распадается на несколько временных составляющих. Суммарное значение импеданса Zth(j-a) может быть определено путем добавления соответствующих тепловых характеристик силового модуля с учетом путей распределения температуры. Кривая Zth представляется в виде суммы n экспоненциальных функций:
Количество слагаемых ν и величины Rthν и τν выбираются таким образом, чтобы обеспечить достоверную аппроксимацию характеристики динамического теплового импеданса при разумных вычислительных ресурсах. Базой для определения значений Rth и τth служит кривая Zth, получаемая экспериментальным путем. Математические программы и табличные средства вычислений (Excel) способны решать системы уравнений с несколькими неизвестными путем задания нулевого значения суммы квадратов ошибки для большого количества точек интерполяции, как показано в следующем выражении:

Для исключения абсурдных решений задается условие, что Rth и τth всегда больше 0. Количество пар значений Rth/τth можно увеличивать до тех пор, пока не будет достигнута требуемая точность (в большинстве случаев трех-пяти итераций бывает достаточно).
Факторы, определяющие тепловое сопротивление
Величина теплового сопротивления зависит от числа расположенных на радиаторе модулей, при этом справочное значение Rth(s–a), как правило, относится к случаю равномерного распределения температуры по монтажной поверхности. Увеличение количества источников тепла (рис. 1) приближает реальную ситуацию к этому, идеальному варианту, обеспечивающему минимально возможную величину сопротивления.

Рис. 1. Тепловое сопротивление профиля Р16 при различном количестве n и размере b источников тепла, а также разной длине профиля
Процесс его измерения достаточно сложен и требует больших временных затрат, однако справочные данные зачастую недостаточно точны для конкретных применений. Хорошим решением является моделирование с помощью метода конечных элементов (FEM), который в данном случае особенно эффективен. На рис. 2 приведены результаты компьютерного анализа тепловых режимов при установке одного (справа) и трех стандартных 62-мм IGBT-модулей (слева).

Рис. 2. Результаты теплового моделирования при установке одного и трех модулей на радиаторе (мощность рассеяния — 600 Вт на один модуль)
Для второго варианта (три модуля):
Rth(s–a) = (120 °C–40 °C)/1800 Вт = 0,034 К/Вт.
При установке только одного силового ключа тепловое сопротивление при аналогичных условиях увеличивается примерно на 65%:
Rth(s–a) = (74 °C–40 °C)/600 Вт = 0,0566 К/Вт.
Распределение тепла по телу радиатора достигается за счет хорошей теплопроводности его материала, снижения толщины профиля или с помощью встроенных тепловых труб. Равномерное размещение силовых модулей по монтажной поверхности также способствует улучшению этого показателя, причем зачастую приходится находить компромисс между компактным дизайном и приемлемыми тепловыми характеристиками конструкции.
Пример моделирования на рис. 3 показывает, что сопротивление Rth(s–a) снижается на 11% при увеличении расстояния между модулями с 0 до 18 мм. Как и в предыдущем случае, мощность рассеяния на каждый ключ составляет 600 Вт, температура окружающей среды Ta = +40 °C. С точки зрения оптимизации тепловых параметров, при воздушном охлаждении желательно устанавливать компоненты с интервалом до 3 см (→Rth(s–a) = 0,266 или –17%), однако при этом требуется и радиатор большего размера. В жидкостных системах этот эффект проявляется в гораздой меньшей степени за счет более эффективного охлаждения.
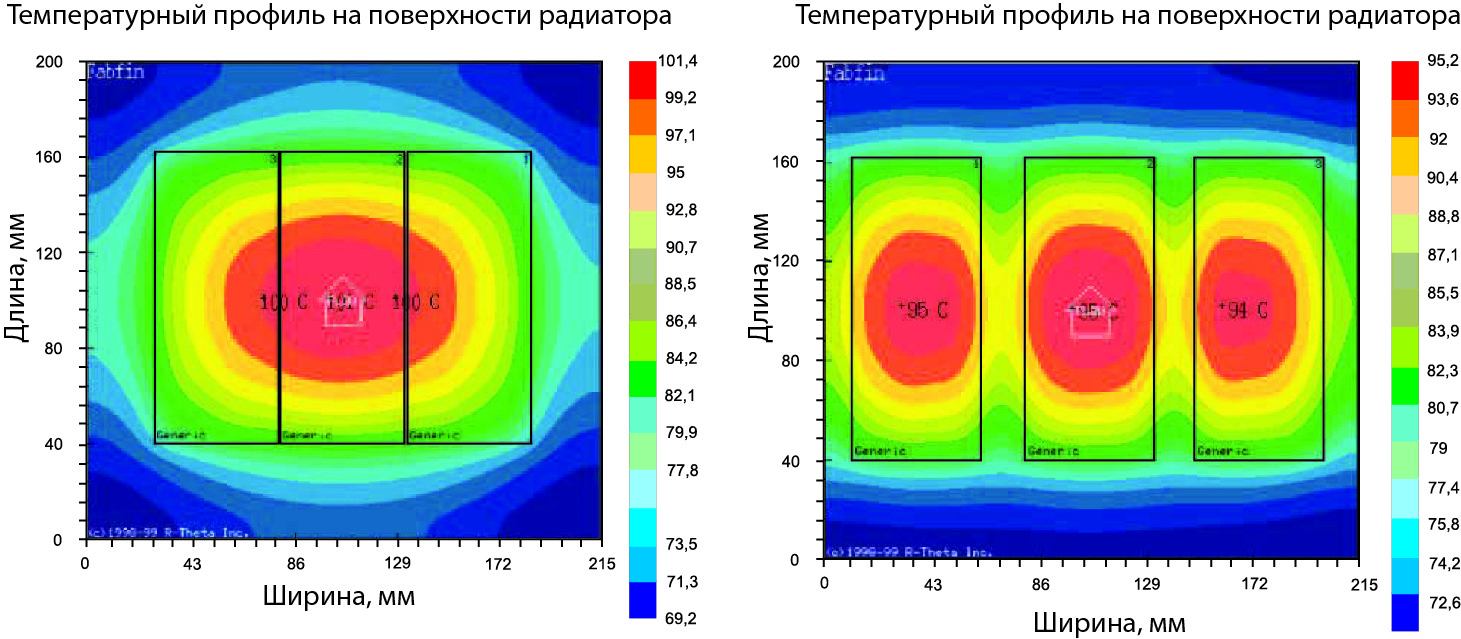
Рис. 3. Улучшение распределения тепла при увеличении расстояния между модулями трехфазного инвертора
Естественное (натуральная конвекция) и принудительное воздушное охлаждение
Режим естественного охлаждения применяется в маломощных преобразователях (до 50 Вт), однако он может понадобиться и в случаях, когда использование вентилятора невозможно (например, в условиях грязных сред) или площадь охлаждаемой поверхности очень велика. Поскольку величина динамического теплового импеданса радиатора при натуральной конвекции превышает тепловое сопротивление силового модуля, перепад температуры между чипом (+125 °С) и охлаждающим воздухом (+45 °С) распределяется по поверхности теплостока. Нагрев радиатора рядом с модулем оказывается выше, чем в случае принудительного охлаждения, он может достигать, например, +90…+100 °С. Потери мощности в этом режиме, как правило, невелики, таким образом, база и ребра теплостока должны быть как можно тоньше, поскольку теплопроводность играет незначительную роль в процессе конвекции. Расстояние между ребрами следует выбирать достаточно большим, чтобы обеспечить хорошее соотношение между воздушным противодавлением (соотношением падения температуры к плотности потока) и аэродинамическим сопротивлением. Чернение поверхности радиатора улучшает его характеристики излучения, что позволяет снизить Rth(s–a) до 25% в зависимости от градиента температуры между монтажной поверхностью и окружающим воздухом.
В отличие от естественной конвекции применение режима принудительного воздушного охлаждения позволяет снизить тепловое сопротивление радиатора в 5–15 раз. На рис. 4 показано сравнение характеристик динамического импеданса Zth(s–a), достигающего статической величины Rth(s–a), для обоих способов отвода тепла на примере профиля Р16 различной длины.

Рис. 4. Характеристика теплового импеданса Zth(s–a)(t) при различной длине профиля Р16 и разном количестве источников тепла n:
а) режим естественного охлаждения;
б) режим принудительного воздушного охлаждения
Перепад давления и объем воздуха
На величину Rth(s–a) влияет объем воздушного потока, проходящий в единицу времени Vair/t и зависящий от скорости воздуха νair и площади сечения А оребренной части:
Vair/t = νair × A.
Предполагается, что охлаждающая среда идет через теплосток в виде ламинарных слоев, хотя на самом деле вокруг ребер образуются завихрения воздуха, и наличие турбуленции улучшает отвод тепла. Это состояние не является статическим, однако формирование турбулентных потоков снижает и динамический тепловой импеданс Zth. На рис. 4 показаны кривые Zth профиля Р16 для режимов естественного и принудительного охлаждения, продолжающиеся до величины Rth(s–a). Как показывают графики, тепловая постоянная также изменяется существенно: если при естественной конвекции статическое значение достигается через 2000–3000 с, то в случае принудительного охлаждения установившееся состояние наступает после 200–300 с.
Увеличение количества ребер и их ширины уменьшает площадь сечения радиатора, а с ростом его длины возрастает перепад давления Δp и снижается объемный расход воздуха, что является обратным эффектом расширения охлаждающей поверхности. Поэтому каждый вентилятор имеет оптимальный режим работы, зависящий от сечения и длины радиатора, а также объема потока охлаждения. Эффективность отвода тепла зависит от свойств вентилятора, описываемых т. н. характеристической кривой Δp = f(Vair/t), показанной на рис. 5. Зона пересечения характеристики вентилятора и кривой падения давления радиатора Δp = f(Vair/t, L) определяет объемный расход воздуха в рабочей точке. Кривую вентилятора следует наносить на график с учетом допуска питающего напряжения (например, 230 В ±10%), поскольку даже при минимальной интенсивности потока (при минимальном напряжении) эффективность охлаждения должна быть достаточной.

Рис. 5. Характеристические кривые вентилятора SKF16B и профиля Рх16 различной длины
Расчет дополнительного теплового импеданса
Температура перегрева определяется на основании суммарной величины мощности рассеяния Ptot(n) n-ного источника тепла, а также статического значения теплового сопротивления Rth(a-a’) или динамического теплового импеданса Zth(a-a’) между двумя находящимися рядом радиаторами. Очевидно, что в процессе работы каждый последующий по ходу потока охлаждения радиатор становится «горячее» предыдущего, поэтому необходимо определить разницу температур теплостоков при известной величине Ptot. Разделение общего перепада температуры между источниками тепла позволяет в результате найти значение Zth(a-a’). В большинстве случаев первая часть импеданса может быть отображена с помощью одного эквивалентного элемента R/t, как показано в следующем выражении:
Для нахождения второго компонента необходимо добавить дополнительный элемент, отображающий градиент температуры между радиатором 1 (а) и 2 (а*). Уровень перегрева зависит от потерь мощности компонента 1, поэтому потери учитываются с помощью весовых коэффициентов. Если они одинаковы для всех источников тепла, то для компонента 2 используется следующая формула:

Аналогично вычисляются третий и все остальные элементы эквивалентной схемы:

Расчет температуры перегрева при воздушном охлаждении
Идея метода заключается в использовании известных базовых уравнений для расчета перегрева и повторного перерасчета входящей температуры для n-ного элемента. Простота и корректность таких вычислений обусловлена высокой способностью охлаждающей среды к сохранению тепла, даже при наличии перекрестных тепловых связей. Удельный вес и теплоемкость охладителя являются термозависимыми параметрами, поэтому для расчета перегрева необходимо определить тепловой коэффициент.
Основная формула выглядит следующим образом:

где Ср — удельная теплоемкость воздуха (кДж/К/кг); r — плотность воздуха (кг/м3); ТСс — температурный коэффициент удельной теплоемкости; Та* — температура охлаждающего воздуха для второго источника тепла; Ptot1 — мощность рассеяния источника 1.
Адаптируя выражение к среднему атмосферному давлению (1 бар) и базовой температуре (0 °С) и преобразуя его для заданной интенсивности охлаждения (м3/ч), получим следующий результат:

где Ptot1, [Вт] — мощность рассеяния источника 1; Vair, [м3/ч] — объемный расход воздуха через поверхность радиатора; King — коэффициент коррекции, учитывающий неравномерное распределение тепла. Как правило, используется значение King = 1…1,25, позволяющее определить среднюю температуру по сечению радиатора.
Для того чтобы в полной мере реализовать нагрузочные возможности современных ключей, рассеиваемое ими тепло должно быть передано на радиатор через конструкционные и изолирующие слои силового модуля. Эффективность отвода мощности потерь Ptot, генерируемой в проводящем и заблокированном состоянии, определяется разницей температур кристалла Tj и радиатора Ts:
ΔTj-s = Tj–Ts.
Для численной оценки уровня перегрева кристаллов при мощности рассеяния Pν используется величина теплового сопротивления Rth(j–c) в статическом состоянии и динамического теплового импеданса Zth(j–c) в переходных режимах:
Rth(j–c) = ΔTj-s / Pν.
Ранее в документации встречался термин Tνj, где индекс «v» означает «виртуальную» температуру перехода, поскольку это значение может быть измерено только на прототипе или получено расчетным способом. Для модулей традиционной конструкции с базовой платой величина «внешнего» теплового сопротивления или динамического импеданса Rth(c–s) / Zth(c–s) определяется между базой и радиатором, а «внутреннего» Rth(j–c) / Zth(j–c) — между кристаллом и базовой платой. Справедливы следующие соотношения:
Rth(j-s) = Rth(j–c)+Rth(c–s),
Zth(j-s) = Zth(j–c)+Zth(c–s).
Теоретическое расчетное значение теплового сопротивления зачастую получается ниже измеренной величины. Основной причиной этого является недостаточно точное описание процесса теплопередачи, а также взаимное влияние и краевые эффекты, которые невозможно учесть при моделировании. Вследствие этого эквивалентная схема, состоящая из RC-цепочек, не может точно отражать свойства сложных электронных систем. На практике, как правило, приходится адаптировать компьютерную модель путем измерения параметров Rth реальной системы и внесения соответствующих поправочных коэффициентов.

Рис. 6. Прогрев воздуха между последовательно расположенными элементами системы
Качество теплопередачи зависит не только от свойств конкретного конструкционного элемента, но и от характеристик следующего за ним слоя (табл. 2). Градиент температур должен выбираться таким образом, чтобы тепловой поток мог преодолеть сопротивление материала с худшей теплопроводностью. Это позволяет улучшить поперечное распределение тепла в расположенном выше слое с лучшими тепловыми характеристиками. Снижение величины Rth может достигаться и за счет уникальных решений, таких, например, как «кремний на алмазной подложке», которые, возможно, найдут свое применение в специальных устройствах в будущем.
|
Материал |
Теплопроводность λ, Вт/(м·К) |
Теплоаккумулирующая способность, кВт/(м3·К) |
КТР α, 10–6/K |
|
Кремний |
148 |
1650 |
4,1 |
|
Медь |
394 |
3400 |
17,5 |
|
Алюминий |
230 |
2480 |
17,5 |
|
Серебро |
407 |
2450 |
19 |
|
Молибден |
145 |
2575 |
5 |
|
Припои |
≈70 |
1670 |
15–30 |
|
DBC Al2O3 |
24 |
3025 |
8,3 |
|
DBC AlN, AlN-AMB |
180 |
2435 |
5,7 |
|
AlSiC (75% SiC) |
180 |
2223 |
7 |
Распределение теплового сопротивления по конструкционным слоям
На рис. 7 показано, как тепловое сопротивление распределяется по слоям стандартного и «безбазового» модуля с подложкой из оксида алюминия. В обоих случаях наибольший вклад (около 50%) в суммарную величину Rth(j–c) вносит теплопроводящий компаунд TIM (Thermal Interface Material). На первый взгляд это кажется странным, поскольку базовая плата обеспечивает лучшее распределение тепла и, соответственно, снижает влияние слоя термопасты. Однако в реальности между базой и радиатором всегда существует зазор, обусловленный шероховатостью их поверхностей, а также изгибом, возникающим при пайке подложки на базовую плату. Для его компенсации используются разные технологические методы, например предварительный изгиб базы. Однако обеспечить абсолютную плоскостность невозможно, поскольку характеристики изгиба меняются в ходе пайки, что связано с процессом растекания припоя и изменением его температуры.

Рис. 7. Распределение теплового сопротивления модуля IGBT 12-го класса (размер чипов 9×9 мм):
а) DBC-подложка Al2O3 на медной базовой плате, слой термопасты 100 мкм;
б) DBC-подложка Al2O3 без базовой платы, слой термопасты 25 мкм
Несмотря на высокую теплопроводность меди (l = 393 Вт/(м·К)), базовая плата вносит заметный вклад в общее значение Rth, что обусловлено ее толщиной (2,5–5 мм). Снижение толщины базы не может заметно изменить процент теплового сопротивления в общем балансе, поскольку при этом ухудшается распределение температуры и, соответственно, уменьшается площадь области, через которую осуществляется отвод тепла от чипов.
Ряд фирм при производстве модулей высокой мощности (ток коллектора свыше 1000 А) использует композитный материал (AlSiC) для изготовления базовой платы и нитрид алюминия (AlN) для изолирующей подложки. Это позволяет улучшить согласование коэффициентов теплового расширения (a: AlN — 5,7 ppm, AlSiC — 7 ppm, Cu — 17 ppm), однако композит имеет худшую теплопроводность (l = 180 Вт/(м·К)) по сравнению с медью и более высокую стоимость.
Кардинальным решением проблемы согласования КТР является разработанная компанией SEMIKRON в начале 90-х годов технология прижимного контакта, позволяющая устранить базовую плату из состава силового модуля и, соответственно, исключить термомеханические напряжения в ее соединительном слое.
Ухудшение распределения тепла в основании модуля в этом случае компенсируется за счет снижения теплового сопротивления на долю, приходящуюся на базовую плату и ее паяный слой. Однако еще более важно, что отсутствие изгиба, вызванного биметаллическим эффектом, позволяет использовать гораздо более тонкий слой термопасты (20–30 мкм вместо 100 мкм) и таким образом существенно улучшить отвод тепла от кристаллов.
Наибольший процент теплового сопротивления силовых модулей приходится на керамическую изолирующую пластину. Отметим, что существуют маломощные IGBT/MOSFET в дискретных корпусах, в которых коллектор IGBT непосредственно соединен с теплоотводящим медным основанием. Однако при монтаже таких компонентов на радиатор приходится использовать внешние изоляторы, параметры которых хуже, чем у DBC-керамики. По сравнению со стандартной подложкой из оксида алюминия Al2O3 с чистотой 96% (l = 24 Вт/(м·К)) лучшими характеристиками обладает сверхчистый оксид (l = 28 Вт/(м·К)) и нитрид алюминия AlN (l = 180–200 Вт/(м·К)). Применение этого материала позволяет существенно снизить тепловое сопротивление модуля и, соответственно, улучшить его мощностные характеристики. Однако при этом резко возрастает и стоимость, поэтому AlN используется, в основном, в силовых ключах с большим напряжением изоляции, таким образом одновременно обеспечивается высокая диэлектрическая прочность и хорошая теплопроводность.
Паяное соединение чипов и DBC-подложки, а также подложки и базовой платы также вносит некоторый вклад в суммарную величину Rth. Устранение базы и замена пайки на новейшую технологию низкотемпературного спекания позволяет в два раза снизить их долю в общем балансе и улучшить теплопроводность.
Процент теплового сопротивления, вносимый керамической изолирующей платой, определяется структурой верхнего слоя омеднения, который используется для монтажа кристаллов и промежуточных соединений модуля. В то время как радиальный поток тепла в нижнем медном слое, соединенном с радиатором, практически не зависит от внешних факторов, интенсивность распределения тепла в верхнем слое ограничена геометрией медных площадок под чипами. Например, в [4] указано, что для кристалла площадью 42 мм2 на DBC-подложке из оксида алюминия сопротивление Rth(j–c) увеличивается примерно на 15%, если площадь омеднения равна площади основания чипа (относительно варианта сплошного медного покрытия DBC-платы).
Тепловое сопротивление кремниевых чипов растет пропорционально их толщине, эта зависимость определяется блокирующим напряжением и технологией IGBT. Очевидно, что площадь, через которую тепловой поток от кристалла отводится на изолирующую подложку и далее на радиатор, определяется размерами его основания. В соответствии с общей формулой для Rth величина теплового сопротивления должна снижаться обратно пропорционально площади кристалла. Однако на практике увеличение отношения площади основания чипа к его периметру ухудшает распределение температуры. Если, например, кристалл 9×9 мм условно разделить на девять частей по 3×3 мм, то внутренний сегмент будет лишен пространства для распространения тепла. Именно этот эффект обусловливает наличие зависимости Rth(j–c) от Achip, как показано на рис. 8.
![Зависимость теплового сопротивления Rth(j–c) от площади кристалла Achip [4]](https://power-e.ru/wp-content/uploads/10_70_08-600x344.jpg)
Рис. 8. Зависимость теплового сопротивления Rth(j–c) от площади кристалла Achip [4]
При использовании подложек с высокой теплопроводностью (например, AlN) влияние эффекта «размера чипа» снижается. Чем хуже тепловые свойства керамики, тем более выраженной становится нелинейность зависимости Rth(j–c). Это также справедливо и по отношению к материалам TIM, применяемым при установке силовых модулей на радиатор. Наличие слоя пасты (с теплопроводностью, например, l = 0,8 Вт/(м·К) для Wacker Р12) создает высокое сопротивление между базовой платой и теплоотводом. Относительная доля Rth(c–s) в общем значении Rth также растет при увеличении толщины (d) слоя пасты и площади кристаллов (рис. 9).

Рис. 9. Зависимость теплового сопротивления Rth(c–s) модуля с базовой платой от размера кристаллов и толщины слоя термопасты
Тепловая взаимосвязь
Благодаря эффекту распределения тепла сопротивление «кристалл–корпус» снижается на 25% при удвоении площади чипа (100 мкм: 120 мм2 = 0,235 К/Вт; 60 мм2 = 0,315 К/Вт), хотя в соответствии с оценочным выражением для Rth уменьшение должно составить 50%. На рис. 9 показано влияние, оказываемое технологией монтажа (толщина слоя термопасты) на тепловые характеристики силового модуля. Рис. 9 показывает, что существуют физические пределы при использовании чипов большей площади для наращивания мощности. Вследствие этого максимальный размер кристаллов, применяемых в силовых модулях, находится в диапазоне от 30 (IMS) до 150 мм2 (Al2O3 DBC). Увеличение мощности достигается за счет параллельного соединения чипов и улучшения распределения тепла.
Стремление к миниатюризации силовых ключей требует от конструкторов внимательного отношения к эффекту взаимного теплового влияния, например при близком расположении кристалла IGBT и его антипараллельного диода. В соответствии с расчетами, представленными в [9], нагрев чипов вследствие тепловой связи, например по подложке из Al2O3, может происходить, если расстояние между ними:
a = 0,6√Achip.
В примере, показанном на рис. 10, это справедливо для чипов площадью 36 мм2, находящихся на расстоянии 3,6 мм. Очевидно, что в каждом конкретном случае величина a зависит от конструкции модуля и теплопроводности его слоев.

Рис. 10. Зависимость теплового сопротивления Rth(j-s) для четырех кристаллов площадью 36 мм2 от расстояния между ними. Толщина слоя пасты для стандартных модулей — 100 мкм, для безбазовых — 25 мкм. Справа: распределение температуры кристаллов, рассеивающих одинаковую мощность, но находящихся на разном расстоянии (0, 1, 6 мм)
В зависимости от плотности установки чипов тепловое взаимодействие осуществляется:
- по верхнему слою металлизации DBC-подложки (например, кристаллы в модуле с максимальным номинальным током для данного типоразмера);
- по базовой плате (например, кристалл IGBT + антипараллельный диод в стандартном модуле);
- по радиатору.
Тепловой импеданс
Как было сказано выше, в дополнение к статическому тепловому поведению силовых ключей очень важно рассматривать и переходные процессы, характеризующиеся динамическим тепловым импедансом Zth. На рис. 11 показан типовой график зависимости Zth(j–c) от длительности импульса проводимости для модуля с подложкой из оксида алюминия при различном размере чипов.
![Динамический тепловой импеданс Zth(j-с) для модуля с подложкой из Al2O3 при разной площади кристаллов [4]](https://power-e.ru/wp-content/uploads/10_70_11-600x353.jpg)
Рис. 11. Динамический тепловой импеданс Zth(j-с) для модуля с подложкой из Al2O3 при разной площади кристаллов [4]
По рис. 11 видно, что при заданной структуре модуля кривые Zth для разных кристаллов сдвинуты относительно друг друга. Таким образом, абсолютная величина теплового сопротивления оказывается пропорциональной площади чипа (без учета постоянной времени экспоненциальной функции). Следовательно, тепловой импеданс для кристаллов разного размера может быть определен с помощью следующего выражения:

Кривые импеданса модулей с базовой платой и без нее идентичны до тех пор, пока накопление тепла происходит в самих кристаллах и DBC-подложке (рис. 12), а при длительности импульса проводимости t более 100 мс графики Zth расходятся. Преимущество стандартных модулей проявляется в диапазоне 1–2 с, что объясняется способностью медной базовой платы к аккумуляции тепла. Тепловые характеристики прижимных «безбазовых» ключей предпочтительнее при больших значениях t благодаря меньшей величине Rth.
![Сравнение тепловых импедансов 600-А модулей 12-го класса с базовой платой (SEMiX 4) и без нее (SKiiP 4); контрольная точка датчика температуры — в отверстии в радиаторе на расстоянии 2 мм от поверхности [5]](https://power-e.ru/wp-content/uploads/10_70_12-600x387.jpg)
Рис. 12. Сравнение тепловых импедансов 600-А модулей 12-го класса с базовой платой (SEMiX 4) и без нее (SKiiP 4);
контрольная точка датчика температуры — в отверстии в радиаторе на расстоянии 2 мм от поверхности [5]
Токонесущая способность силовых терминалов
Совершенствование IGBT-технологий идет по пути роста номинальных токов кристаллов и плотности мощности ключей. Это привело к тому, что токонесущая способность силовых выводов стандартных промышленных конструктивов модулей подошла к своему пределу. Максимальный ток терминалов (It(RMS)) ограничен допустимой температурой перегрева, определяемой потерями мощности на активном сопротивлении rcc’-ee’. Как правило, эти потери пренебрежимо малы по сравнению с мощностью, рассеиваемой кристаллами. Например, на паяных выводах стандартного конструктива 62-мм (rcc’-ee’ = 0,5 мОм) при 400 А рассеивается около 80 Вт:
Pt = Irms2×rcc’-ee’ = 80 Вт.
Токонесущая способность терминалов, подключаемых методом ультразвуковой сварки через алюминиевые проводники и заливаемых компаундом, ниже, чем у паяных, из-за ограниченной площади сечения. Преимуществом этой технологии является более высокая механическая прочность, обусловленная жестким креплением выводов к корпусу. Такие терминалы оказываются более стойкими к вибрационным и ударным воздействиям, они рассчитаны на большие моменты кручения и изгиба.
Угловые паяные выводы имеют прямой контакт с медными шинами DBC-подложки, при этом обеспечивается лучший отвод рассеиваемого ими тепла. Отметим, что данный технологический процесс достаточно сложен и состоит из нескольких этапов, включающих предварительную формовку и вторичную пайку.
Прижимные соединения большой пощади, используемые, например, в дисковых корпусах, считаются почти идеальными, поскольку у них отсутствует эффект накопления усталости при воздействии термомеханических напряжений. Они обеспечивают хорошую электрическую и тепловую связь благодаря большому количеству точек реальной проводимости. Однако для реализации преимуществ таких соединений конструкция их подключения должна быть рассчитана на очень высокое усилие прижима, действующее в течение всего срока службы изделия.
- Arendt Wintrich, Ulrich Nicolai, Werner Tursky, Tobias Reimann. Application Notes for IGBT and MOSFET modules. SEMIKRON International, 2010.
- Андрей Колпаков. Контрольная точка // Электронные компоненты. 2005. № 6.
- Jurgen Schultz-Harder. Liquid cooling in high density packages. www.curamik.com
- Martin Freyberg, Uwe Scheuermann. Measuring Thermal Resistance of Power Modules. PCIM Europe journal, 2003.
- Calculation of the Maximum Virtual Junction Temperature Reached Under Short-time or Intermittent Duty. IEC 60747-6 by SEMIKRON.
- Андрей Колпаков. Охлаждение в системах высокой мощности // Силовая электроника. № 3.
- Arendt Wintrich, Ulrich Nicolai, Werner Tursky, Tobias Reimann. Application Notes for IGBT and MOSFET modules. SEMIKRON International, 2010.
- Mitsubishi IGBT manual 2009. mitsubishichips.com/Global/files/manuals/igbt_note_e.pdf
- Murata A., Tabata M. 2500 A/1200 V Dual IGBT Module. PCIM Europe 2009, Conference Proceedings.
- Konrad S. Ein Beitrag zur Auslegung und Intergation spannungsgespeister IGBT-Wechselrichter. diss. TU Ilmenau 1997, ISLE Verlag.
 28 июля, 2020
28 июля, 2020 5 февраля, 2020
5 февраля, 2020