
Датчики тока с цифровым выходом и сигма-дельта преобразованием
Передовые технологии датчиков LEM прямого усиления
Компания LEM предлагает большое семейство аналоговых датчиков тока прямого усиления, в которых технология на основе элементов Холла интегрирована со специальной обработкой сигнала, что гарантирует высокую точность и надежность датчиков. Эти миниатюрные и легкие устройства являются высокоэффективным средством измерения и отличаются низким энергопотреблением.

Рис. 1. Принцип работы датчика прямого усиления
Принцип работы датчика показан на рис. 1: ток, протекающий в проводнике, создает магнитное поле, которое концентрируется в воздушном зазоре магнитной цепи. Элемент Холла измеряет магнитное поле, пропорциональное измеряемому току. После обработки и усиления сигнал на выходе является точным аналоговым отображением первичного тока. Для оптимизации характеристик датчика элементы Холла и схема обработки сигнала объединены в одной специализированной интегральной микросхеме (ASIC) (рис. 2).

Рис. 2. ASIC LEM HG2
Новая цифровая продукция LEM
Компания LEM сделала значительный шаг вперед благодаря добавлению сигма-дельта (Ʃ∆) модулятора второго порядка в усовершенствованную микросхему ASIC, использованную в новом семействе датчиков (рис. 3).

Рис. 3. Датчик HO 150-NPW
На выходе датчика формируется битовый поток, в котором плотность цифровых «единиц» зависит от измеряемого тока, как показано на рис. 4.

Рис. 4. Цифровое преобразование с помощью SD-модулятора
На передаточной характеристике (рис. 5) показана средняя плотность «единиц» по шкале 0–1 и отфильтрованный выходной сигнал, представленный как 16-разрядное слово по десятичной шкале 0–65535. В следующем разделе приведены другие варианты фильтрации. На рис. 5 также показано эквивалентное выходное напряжение аналогового датчика. Как и аналоговый, новый цифровой датчик работает в диапазоне ±IPM, что соответствует средней плотности «единиц» 0,1–0,9.
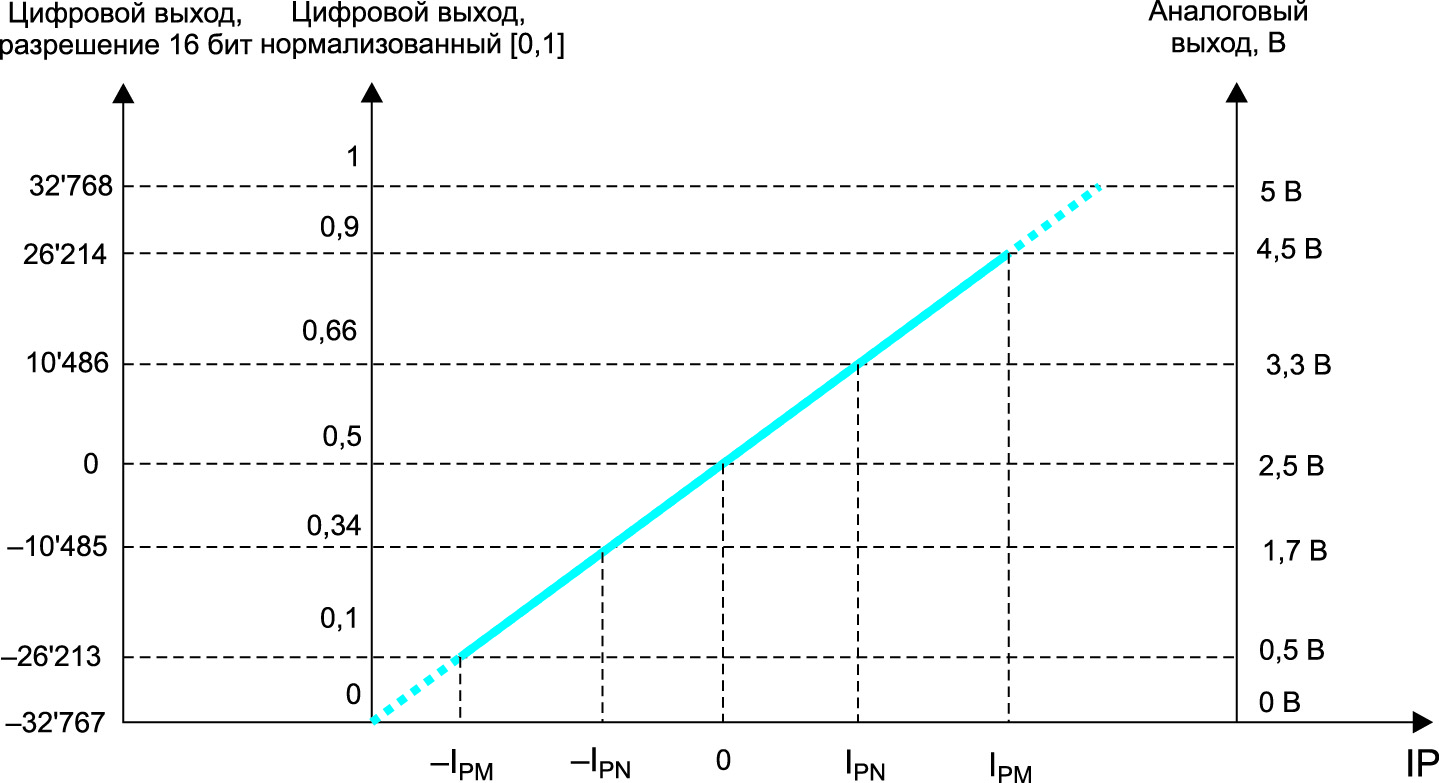
Рис. 5. Передаточная характеристика
Цифровой фильтр реализуется пользователем (рис. 6). Преимущество такого решения состоит в том, что минимизируется количество подключенных к выходу датчика цепей; пользователь сам определяет, какой фильтр лучше всего подходит для конкретной задачи, формат выходного сигнала выбирается в соответствии с требованиями системы.

Рис. 6. Формирование битового потока датчика LEM
Производительность системы и выбор фильтра
Любое преобразование аналогового сигнала в цифровой включает квантование, а погрешность цифрового сигнала относительно точного аналогового значения, которое он отображает, эквивалентна добавлению шума. Выход Ʃ∆-модулятора представляет собой не просто поток битов с определенной плотностью «1» и «0»; эта последовательность рандомизирована таким образом, что шумы квантования вынесены за диапазон частот, используемых для измерения тока.
Пользователь обрабатывает поток битов с помощью цифрового фильтра, подавляющего высокочастотные шумы. Как и для любого фильтра, здесь необходимо найти компромисс для оптимизации производительности системы: узкая полоса пропускания обеспечивает низкий уровень шума (или высокое разрешение) за счет ухудшения времени отклика, и наоборот. В примере на рис. 7 битовый поток обрабатывается дважды: посредством фильтра 20 кГц, который дает разрешение 12 бит для точных измерений первичного тока, и широкополосным фильтром для детектирования токов перегрузки с временем отклика 5 мкс. Кроме того, встроенный детектор тока перегрузки датчика (Over Current Detect, OCD) позволяет обнаруживать короткие замыкания с временем отклика всего 2,7 мкс.

Рис. 7. Пример реализации, влияние OSR и порядка фильтра на время отклика и разрешение
Последовательность битов обрабатывается цифровым фильтром. Благодаря коэффициенту передискретизации (OSR) модулятора, на выходе цифрового фильтра каждый OSR бит может быть обработан без потери информации в нужном рабочем диапазоне.
Задержка фильтра зависит от его типа: информация задерживается на период 2×OSR×CLK на выходе sinc2 фильтра, в то время как период 3×OSR×CLK необходим, чтобы получить точный выходной сигнал после скачка на входе для распространенного фильтра sinc3. Скорость передачи данных на выходе новых датчиков LEM составляет 10 Мбит/с. Сочетание OSR, выбранного типа фильтра и скорости передачи определяет время отклика, пропускную способность и эффективное разрешение каждого из вариантов обработки битового потока, как показано в таблице для датчика НО 150-NPW (табл. 1).
|
Порядок |
Битрейт, Мбит/с |
Коэффициент передискретизации (OSR) |
Время |
Детектирование перегрузки |
Диапазон частот |
Эффективное разрешение LEM, бит |
Примечания |
|
3 |
10 |
128 |
30,4 |
2,7 |
21 |
12,1 |
Выше точность |
|
64 |
16,5 |
41 |
11,8 |
||||
|
32 |
9,4 |
82 |
10 |
||||
|
16 |
6,1 |
164 |
7,8 |
||||
|
8 |
4,4 |
329 |
5,5 |
||||
|
2 |
128 |
22,7 |
24 |
11,8 |
Лучше время отклика |
||
|
64 |
12,6 |
47 |
9,9 |
||||
|
32 |
7,4 |
95 |
8 |
||||
|
16 |
5,2 |
189 |
6 |
||||
|
8 |
3,8 |
379 |
3,8 |
||||
|
1 |
32 |
4 |
138 |
4 |
Быстрый отклик |
Разрешение всей системы, состоящей из аналоговой части датчика, Ʃ∆-модулятора и цифрового фильтра, ограничено либо присущим системе шумом квантования, либо аналоговым шумом элементов Холла и усилителей. При быстром времени отклика (например, с OSR = 16 и фильтром sinc2) разрешение определяется системой и будет одинаковым с любым датчиком. При замене фильтра на sinc3 и увеличении OSR эффективное разрешение улучшается, но оно будет ограничено аналоговыми шумами на уровне 11–13 бит (в зависимости от чувствительности датчика).
Термин «эффективное» разрешение использован потому, что для удобства пользования системой на выход фильтра может выводиться слово длиной 16 бит или 2×8 бит. Однако только наиболее значащие биты, соответствующие эффективному разрешению, отображают полезную информацию, в то время как менее значимые биты содержат шумы. Обычно выход цифрового фильтра дискретизируется с частотой, равной битрейту, деленному на OSR; это называется «децимация». В датчиках LEM при OSR = 64 выходные данные обновляются каждые 6,4 мкс.
Физические интерфейсы
Для передачи битового потока LEM предлагает на выбор два физических интерфейса. В обоих случаях скорость передачи составляет 10 Мбит/с.
КМОП однополярный
При использовании этого интерфейса тактовые импульсы и данные предоставляются в виде стандартных однополярных уровней КМОП (Uc и GND). Это подходит для передачи информации на небольшие расстояния (до нескольких десятков сантиметров), далее этого расстояния проблема электромагнитной совместимости (EMC) может стать существенной. Максимально допустимая емкостная нагрузка — 30 пФ. Назначение выводов и временные диаграммы показаны в таблице 2 и на рис. 8.

Рис. 8. Временные диаграммы однополярного КМОП-интерфейса
|
Вывод |
Имя |
Тип |
Функция |
Примечание |
|
1 |
Uc |
Питание |
+5 В |
|
|
2 |
GND |
Общий питания |
0 В |
|
|
3 |
DATA |
Цифровой выход |
Битовый поток — данные |
|
|
4 |
DATA |
Цифровой выход |
Битовый поток — тактовая частота |
|
|
5 |
OCD |
Открытый сток |
Выход детектора перегрузки по току |
Необходим резистор |
|
6 |
STANDBY |
Цифровой вход |
Дежурный режим |
Активный высокий уровень |
Манчестерский RS422
Данный интерфейс предназначен для передачи данных на большие расстояния. В этом случае тактовые импульсы и данные объединены в манчестерский кодированный сигнал. Выход датчика (вывод 3) дополнен комплементарным сигналом на выводе 4. Так создается дифференциальный сигнал, совместимый со стандартным интерфейсом RS422. Расположение двух сигнальных проводников в непосредственной близости друг от друга позволяет заметно снизить уровень электромагнитных помех (EMС), как излучаемых, так и принимаемых. Назначение выводов и временные диаграммы приведены в таблице 3 и на рис. 9.
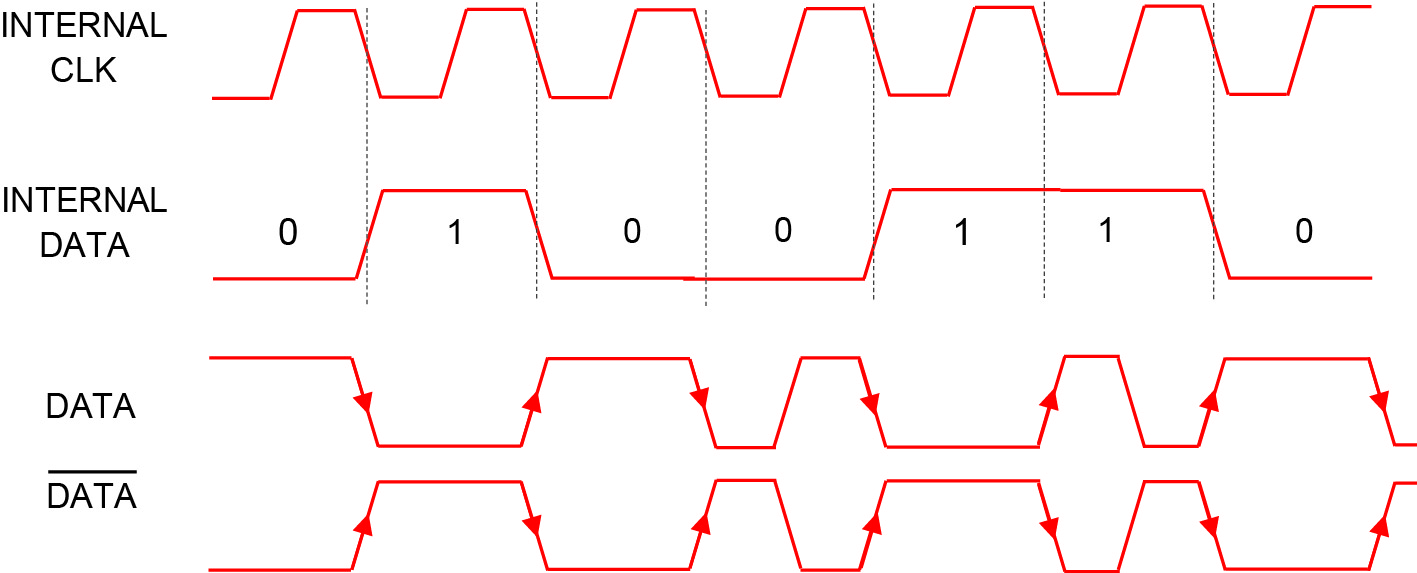
Рис. 9. Временные диаграммы манчестерского интерфейса
|
Вывод |
Имя |
Тип |
Функция |
Примечание |
|
1 |
Uc |
Питание |
+5 В |
|
|
2 |
GND |
Общий питания |
0 В |
|
|
3 |
DATA |
Цифровой выход |
Битовый поток — манчестерский код, положительный выход |
|
|
4 |
DATA |
Цифровой выход |
Битовый поток — манчестерский код, отрицательный выход |
|
|
5 |
OCD |
Открытый сток |
Выход детектора перегрузки по току |
Необходим резистор |
|
6 |
STANDBY |
Цифровой вход |
Дежурный режим |
Активный высокий уровень |
Недостатком в данном случае является то, что необходимо декодирование манчестерского кодированного сигнала приемником. Это можно сделать с помощью ПЛИС (FPGA) или процессора (DSP) со специальными аппаратными блоками (SDM). Выбор интерфейса обусловлен, главным образом, расстоянием между датчиком и цифровым фильтром (табл. 4).
|
DATA+CLK (CMOS) SINGLE ENDED |
DATA+DATA MANCHESTER RS 422 |
 |
 |
|
Малые расстояния |
Большие расстояния |
Датчики прямого усиления LEM — аналоговый и цифровой
Сравнения, сделанные в этом разделе (табл. 5), справедливы для датчиков с точностью, аналогичной точности цифровых датчиков прямого усиления на эффекте Холла, описанных в данной статье.
|
Параметр |
O/L Hall ASIC — аналоговый |
O/L Hall ASIC — цифровой |
|
Средний и высокий уровень измеряемого тока |
Лучший выбор для стандартных и прецизионных приводов и инверторов. |
|
|
Низкий уровень измеряемого тока |
Большее влияние шума от элементов Холла. Хорошие характеристики |
Меньшее эффективное разрешение. Хорошие характеристики |
|
Изоляция |
Безопасная изоляция за счет конструкции. |
|
|
Калибровка |
Полностью откалиброваны и готовы к применению. |
|
|
Время отклика |
Хорошее (лучше, чем обычные O/L). |
Задержка за счет встроенного АЦП, но быстрый отклик OCD. |
Задержка и цифровая фильтрация
Как указано в разделе «Производительность системы и выбор фильтра», сочетание OSR, выбора фильтра и скорости передачи данных определяет время отклика, полосу пропускания и эффективное разрешение каждого из вариантов обработки битового потока с выхода модулятора.

Рис. 10. Моделирование фильтра (Sinc 2), OSR и задержка
Показанное на рис. 10, 11 моделирование иллюстрирует эти альтернативы в области быстродействия, позволяющие оптимизировать производительность системы: узкая полоса пропускания обеспечивает низкий уровень шума (или высокое разрешение) за счет ухудшения времени отклика, и наоборот. «Цифровая задержка» между первичным и выходным сигналом, обусловленная фильтром, постоянна. Это свойство позволяет легко корректировать задержку за счет временного сдвига сигнала.

Рис. 11. Моделирование фильтра (Sinc 3), OSR и задержка
 5 июня, 2020
5 июня, 2020 26 июня, 2015
26 июня, 2015 12 сентября, 2014
12 сентября, 2014