
ШКОЛА MATLAB. Урок 20. Аналитическое и модельное исследование динамических характеристик мехатронных систем с машиной двойного питания
Введение
Современные работы в области теории и принципов построения систем с машиной двойного питания (МДП) начались благодаря исследованиям, осуществленным в конце 1960-х — начале 1970-х годов лабораторией машин двойного питания ВНИИЭ под руководством докторов технических наук, профессоров М. М. Ботвинника и Ю. Г. Шакаряна [1]. Изучение теоретических вопросов и инженерная отработка принципов построения таких систем проводились институтами ВНИИЭМ, НИИХЭМЗ, ВНИИэлектропривод, Гипроуглеавтоматизация, МЭИ и другими научными коллективами. В результате этой деятельности были созданы основы теории, структурные схемы, принципы построения, а также спроектирован ряд опытных и промышленных установок, позволивших провести инженерную отработку и эксплуатационную проверку систем с МДП [9]. За рубежом интерес к системам, построенным на базе МДП, возник позднее, в 80–90-х годах прошлого века, но развитие теории и практики шло значительно интенсивней, чем в России [15–30]. Работы по проектированию, построению и внедрению систем с МДП широко проводились и проводятся в Японии фирмой Hitachi, в Германии — AKW, Siemens, AEG, в Норвегии — ABB Research, в Австралии — Rainbow Power Company.
Важнейшей частью рассматриваемых систем является активный полупроводниковый преобразователь (АПП), включаемый в роторную цепь асинхронной машины с фазным ротором. Этот преобразователь представляет собой импульсный элемент с дискретно изменяющимися параметрами, при исследовании которого используются основные положения теории вентильных систем, предложенные А. А. Булгаковым [3]. Разработка общей теории вентильных каскадов предполагает применение основной идеи метода А. А. Булгакова — выделение непрерывной полезной составляющей тока и напряжения и их использование для анализа как установившихся, так и переходных процессов в системе.
Именно этот подход положен в основу исследований динамики систем с МДП в работах российских и зарубежных специалистов [1, 3–29]. В каждой из цитируемых работ изучен конкретный электропривод или генераторная установка, обеспечивающие помимо основной задачи дополнительную задачу оптимизации энергоэффективности, которая в конечном итоге сводится к минимизации реактивной мощности в питающей сети за счет специального управления АПП.
В настоящей статье сделана попытка исследования и сравнения динамических характеристик систем с МДП при различных способах управления АПП применительно к транспортным системам. Для исследования динамических характеристик разработаны структурные модели в пакете Simulink и даны рекомендации по построению замкнутого электропривода.
Функциональная схема машины двойного питания
В машинах двойного питания энергия от питающей сети подводится (или отводится) и к статорным, и к роторным обмоткам. Статорные обмотки подключаются к питающей сети непосредственно, а роторные — через регулируемый активный полупроводниковый преобразователь (АПП). В качестве АПП используются два транзисторных инвертора, объединенных звеном постоянного тока с емкостным фильтром (рис. 1). Такие структуры позволяют управлять потоком активной и реактивной мощности в питающей сети и в самой машине.
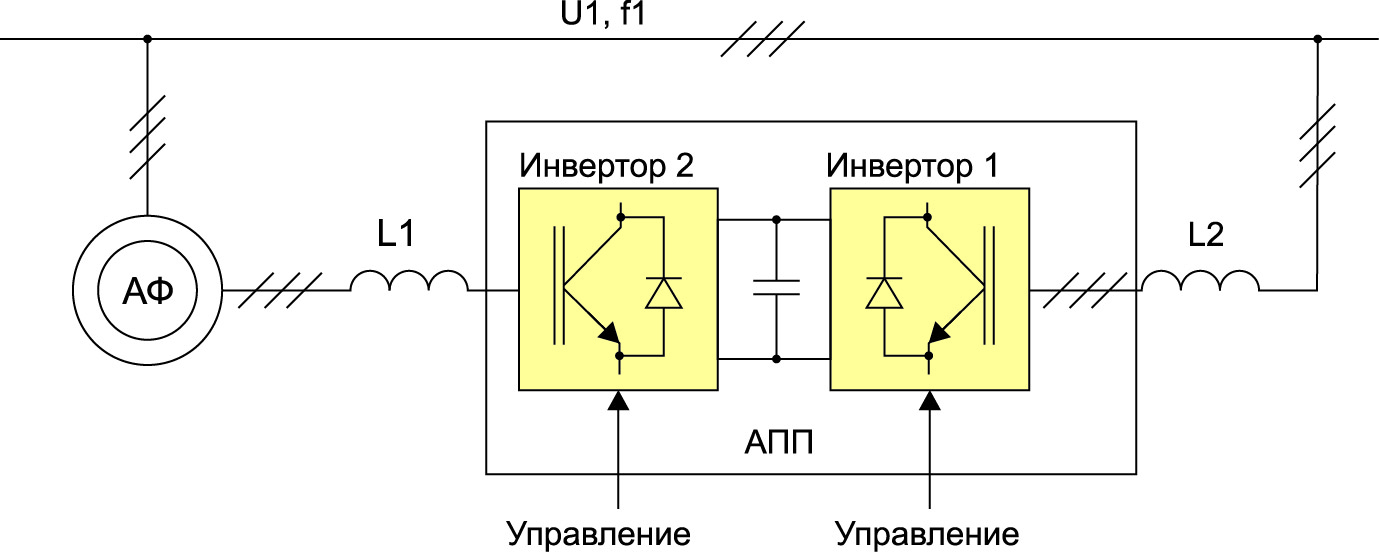
Рис. 1. Функциональная схема МДП при питании от сети переменного тока
Основные преимущества МДП состоят в следующем:
- Управление производится по цепи ротора, поэтому электромагнитная мощность в роторе, пропорциональная скольжению, не рассеивается, а передается на вал либо рекуперируется в сеть, что обеспечивает высокий КПД системы.
- МДП может работать на скоростях выше и ниже синхронной, как в двигательном, так и в генераторном режиме. Поэтому при использовании МДП в качестве двигателя не возникает сложностей с получением момента на разных скоростях, а при использовании МДП в качестве генератора просто решается проблема стабилизации параметров генерируемого напряжения при изменении скорости вращения вала.
- В МДП регулируется внешний и внутренний поток активной и реактивной мощности, что позволяет строить энергоэффективные электроприводы [5, 6, 10, 11, 16, 17, 19, 20, 22–25, 28] и генераторные установки [15, 18, 21, 27, 29], а также энергосберегающие стенды для испытаний электрических машин и двигателей внутреннего сгорания [13, 14].
Обобщенное математическое описание МДП
Обобщенная математическая модель машины двойного питания приведена в [1, 7, 9, 11]. Уравнения записаны во вращающейся с произвольной угловой частотой wk комплексной системе координат (x — вещественная ось, y — мнимая ось) для приведенной машины с использованием метода результирующего вектора [7].
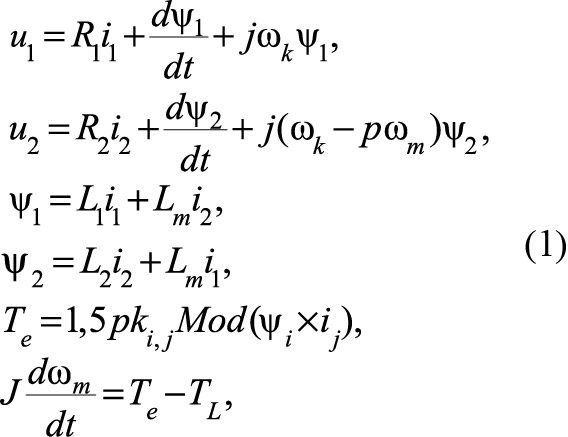
где u1, u2 — результирующие векторы напряжений статора и ротора; y1, i1, y2, i2 — результирующие векторы потокосцеплений, токов статора и ротора; R1, L1, R2, L2 — активные сопротивление и индуктивности статора и ротора соответственно; Lm — главная индуктивность намагничивающего контура; wk — угловая скорость вращения системы координат; p — число пар полюсов; Te — электромагнитный момент машины; TL — момент нагрузки на валу машины; wm — скорость вращения ротора; ki,j — коэффициент, зависящий от выбора пары векторов в уравнение момента.
Электромагнитный момент в уравнении (1) является векторным произведением любой пары векторов. Таких пар может быть четыре: (i1, i2); (y1, y2); (i1, y2); (i2, y1). Часто в рассмотрение вводится потокосцепление взаимной индукции ym = Lm(i1 + i2). В этом случае появляется еще четыре возможности представления электромагнитного момента машины через следующие пары: (i1, ym); (i2, ym); (y1, ym); (y2, ym). После выбора той или иной пары уравнение момента приобретает определенность, а количество уравнений в системе (1) сокращается до четырех.
Дальнейшее преобразование обобщенного описания МДП базируется на теоретических подходах обратных задач динамики [30] и методах структурного синтеза [2]. В теории асинхронного электропривода эти подходы связаны с выбором базового результирующего вектора, в качестве которого выбрана одна из переменных состояний (i1, i2, y1, y2, ym)
или переменная режима u1, u2. Базовым результирующим вектором считается тот, который совмещается с одной (обычно вещественной) вращающейся осью комплексной плоскости. После выбора базового результирующего вектора математическое описание машины существенно упрощается.
Однако, и это следует особо подчеркнуть, в данном случае получившаяся система уравнений описывает уже не машину, а некую мехатронную систему, чья структура управляет машиной так, чтобы выбранный вектор был совмещен с вещественной осью вращающейся системы координат.
Итак, выбор базового результирующего вектора является первым шагом структурного синтеза системы управления машиной двойного питания.
Следующим шагом структурного синтеза мехатронной системы с МДП является выбор типа регулятора в цепи ротора машины. Инвертор 2 (рис. 1) может быть как источником напряжения, так и источником тока. В последнем случае инвертор 2 обеспечивает токовое управление машиной по цепи ротора.
Ниже динамику рассматриваемых мехатронных систем с МДП будем оценивать по реакции электромагнитного момента, поскольку выходная координата электропривода — скорость связана с моментом простым математическим соотношением, зависящим от характера нагрузочного момента. Исследования проведены применительно к транспортным системам.
В транспортных системах момент нагрузки можно принять пропорциональным скорости TL = kLwm, тогда связь скорости и момента описывается линейным дифференциальным уравнением первого порядка (апериодическое звено).
Ниже анализ мехатронных систем с МДП выполнен для машины 215HP (160 кВт) 400 В/50 Гц 1487 RPM с параметрами:
U1 = 310 B; f1 = 50 Гц (w1 = 314 1/); p = 2;
R1 = 0,0138 Ом; R2 = 0,00773 Ом;
Lm = 0,0077; L1 = L2 = 0,00782 Гн;
J = 2,9 кггm2; kL = 0,057 Н.м.с.
При токовом управлении машиной по цепи ротора заданной величиной (переменной режима) выступает ток ротора и уравнения (1) преобразуются к виду:

Уравнения (2) можно преобразовать, исключив из них две переменные состояния y2 и i1, тогда:
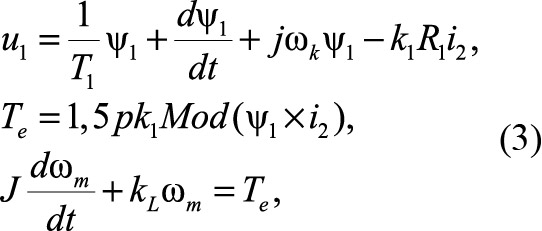
где k1 = Lm / L1.
Мехатронная система с МДП при токовом управлении с базовым вектором напряжения сети
Математическое описание мехатронной системы с МДП, управляемой током ротора, в системе координат, ориентированной по вектору напряжения питающей сети, получим из уравнений (3) при u1 = u1x = U1 = const; u1y = 0; wk = w1 = 2pf1 = const:

где T1 = L1 / R1.
Математическое представление МДП с токовым управлением в цепи ротора во вращающейся системе координат, совмещенной с вектором напряжения сети, является основой для синтеза мехатронных систем с частотно-токовым управлением [11].
Система уравнений (4) описывает двухканальную нелинейную динамическую систему с перекрестными связями. Момент в этой системе определяется как динамикой каждого канала, так и перекрестными связями. Исследование динамики рассматриваемой мехатронной системы с МДП осуществим при помощи структурной модели, построенной по уравнениям (4) и приведенной на рис. 2.

Рис. 2. Модель мехатронной системы с МДП, управляемой током ротора, в системе координат, ориентированной по вектору напряжения питающей сети
Электромагнитные переходные процессы по потокосцеплениям в обоих каналах и по моменту представлены на рис. 3. Колебательность системы определяется наличием перекрестных связей между каналами. Величина этих перекрестных связей определяется частотой сети (w1 = const). Построение данной системы требует наличия генератора скольжения для задания токов в роторе. Синтез электропривода предполагает сложные нелинейные преобразования, осуществляющие компенсацию перекрестных связей [11].

Рис. 3. Динамические процессы в мехатронной системе с МДП, управляемой током ротора, в системе координат, ориентированной по вектору напряжения питающей сети
Мехатронная система с МДП при токовом управлении с базовым вектором потокосцепления статора
Математическое описание мехатронной системы с МДП, управляемой током ротора с базовым вектором потокосцепления статора, получается из (3) при y1 = y1x = const, y1y = 0.

Математическое описание МДП с токовым управлением в цепи ротора во вращающейся системе координат, совмещенной с потокосцеплением статора, является основой для синтеза мехатронных систем с векторным управлением [11].
Система уравнений (4) описывает двухканальную нелинейную динамическую систему. Момент в этой системе формируется в канале x. Структурная модель мехатронной системы с МДП, управляемой током ротора, в системе координат, ориентированной по вектору потокосцепления статора приведена, на рис. 4.

Рис. 4. Модель мехатронной системы с МДП, управляемой током ротора, в системе координат, ориентированной по вектору потокосцепления статора
Электромагнитные переходные процессы в системе представлены на рис. 5.

Рис. 5. Динамические процессы в мехатронной системе с МДП, управляемой током ротора, в системе координат, ориентированной по вектору потокосцепления статора
В этой системе переходный процесс по потокосцеплению статора и, соответственно, по моменту носит апериодический характер. Перекрестные связи отсутствуют, поэтому синтез электропривода может осуществляться классическими способами. Построение системы с векторным управлением требует наличия генератора скольжения и датчика или наблюдателя потокосцепления статора.
Исследование мехатронной системы с МДП и прямым управлением моментом
Идея скользящего управления потокосцеплением статора и моментом асинхронной машины была впервые выдвинута в 1979 году Г. Б. Онищенко и И. Л. Локтевой [9]. Позднее данный метод управления был развит в работах М. Депенброка [16], И. Тэкэхэши и Т. Ногучи [20]. В настоящее время за этим методом утвердилось название прямого управления моментом (DTC — direct torque control). Первая попытка создания структурной модели асинхронного электропривода на базе МДП с DTC—управлением была осуществлена в работах [4, 8]. Ниже представлена усовершенствованная модель мехатронной системы с МДП, учитывающая специфику ее работы в транспортных системах.
Для описания DTC—управления в МДП уравнения (1) преобразуются к виду:

Основные особенности математической модели системы с прямым управлением моментом следующие [10–12]:
- При описании электромагнитных процессов в качестве переменных состояния выбираются потокосцепление статора и потокосцепление ротора.
- В качестве базового вектора выбран вектор потокосцепления статора (y1 = y1x, y1y = 0).
Система управления строится двухканальной во вращающейся со скоростью wk системе координат. В канале x поддерживается постоянным модуль потокосцепления ротора за счет реализации скользящего режима по потоку. В канале y осуществляется управление моментом за счет реализации скользящего режима по моменту.
- В системе с DTC управление реализуется изменением напряжения в обмотке ротора (на выходе инвертора 2, рис. 1) в соответствии с таблицей оптимальных переключений [10, 12], в которой осуществляется преобразование системы координат таким образом, чтобы удовлетворялось уравнение y1 = y1x, y1y = 0.
С учетом перечисленных особенностей можно считать, что вектор потокосцепления статора на интервале коммутации остается неизменным, y1 = y1x = const. Следовательно, изменение значения составляющей потокосцепления ротора y2y путем воздействия на пространственный вектор напряжения, приложенный к обмоткам ротора, приводит к изменению величины момента.
Тогда в результате преобразования исходной системы уравнений (6) получим уравнения, описывающие протекающие электромагнитные и электромеханические процессы в мехатронной системе с МДП при DTC-управлении:

В системе (7) приняты следующие обозначения: T1 = L1/R1, T2 = L2/R2, k1 = Lm/L1, k2 = Lm/L2, s = 1 — k1k2, C = 1,5 × k1p/sL1.
Математическое описание МДП со скользящим управлением по потокосцеплению ротора и электромагнитному моменту во вращающейся системе координат, совмещенной с потокосцеплением статора, является основой для синтеза мехатронных систем с прямым управлением моментом.
Синтезированная система содержит два раздельных канала управления напряжением питания обмоток ротора. Один канал осуществляет стабилизацию текущего значения модуля вектора потокосцепления ротора, второй канал формирует сигнал задания электромагнитного момента. С учетом перечисленных положений и системы уравнений (7) в пакете Simulink разработана структурная модель мехатронной системы с машиной двойного питания. Данная модель представлена на рис. 6.

Рис. 6. Структурная модель мехатронной системы с МДП и прямым управлением моментом
В части 1 реализованы четвертое, восьмое и девятое уравнения системы (7). В части 2 модели реализованы третье, шестое и седьмое уравнения системы (7). В части 4 рассчитываются проекции напряжения статора на вращающиеся оси по первому и пятому уравнениям системы (7).
На рис. 7 приведены результаты моделирования, полученные на модели. Мехатронная система с МДП и прямым управлением моментом представляет собой двухканальную систему с перекрестными связями. Величина перекрестных связей зависит от разности скорости вращения координат wk и скорости ротора wm. Однако наличие замкнутых контуров по составляющей «x» потокосцепления ротора и моменту компенсирует влияние этих перекрестных связей.

Рис. 7. Динамические процессы в мехатронной системе с МДП и DTC-управлением
В этой системе переходный процесс по составляющей y2y потокосцепления ротора и, соответственно, по моменту носит интегральный характер, поэтому синтез электропривода может осуществляться классическими способами. Следует отметить, что быстродействие системы с DTC-управлением приблизительно на два порядка превышает быстродействие рассмотренных систем с токовым управлением МДП по роторной цепи. Построение системы с векторным управлением требует наличия наблюдателя переменных состояния машины и логических преобразований, реализующих таблицу оптимальных переключений инвертором в цепи ротора машины.
Заключение
Анализ рассмотренных мехатронных систем с машиной двойного питания показывает, что самым простым с точки зрения реализации является частотно-токовый способ управления. Однако в такой системе перекрестные связи вызывают значительные колебания момента, что серьезно усложняет построение электропривода. Системы с векторным управлением током ротора являются более сложными по построению. В них компенсированы перекрестные связи, они обеспечивают апериодический переходный процесс по моменту и отсутствие проблем при построении замкнутого электропривода для транспортных систем. Системы с прямым управлением моментом требуют значительных аппаратных и программных затрат. В настоящее время подобные системы являются наиболее перспективными при построении высокоточных приборных электроприводов различного назначения. Вероятно, будущее за этими системами, но в транспортных системах до нынешнего дня они не нашли широкого распространения. При построении электропривода на базе рассмотренных мехатронных систем его динамические характеристики в значительной степени определяются внешним контуром, обеспечивающим поддержание заданной скорости в системе. Сравнение динамических свойств таких электроприводов с МДП требует отдельного рассмотрения. Из опыта проектирования электроприводов с асинхронным короткозамкнутым двигателем [4, 6, 10, 11, 19] можно сделать предварительный вывод о том, что динамические характеристики электроприводов с МДП, построенные с использованием рассмотренных алгоритмов управления, будут практически одинаковыми.
- Ботвинник М. М., Шакарян Ю. Г. Управляемая машина переменного тока. М.: Наука, 1969.
- Бойчук Л. М. Метод структурного синтеза нелинейных систем автоматического управления. М.: Энергия, 1971.
- Булгаков А. А. Новая теория управляемых выпрямителей. М.: Наука, 1970.
- Герман-Галкин С. Г., Ляпин А. С. Анализ и модельное исследование асинхронного электропривода со скользящим управлением потокосцеплением и моментом // Мехатроника, Автоматизация, Управление. 2012. № 4.
- Гуляев И. В., Тутаев Г. М. Системы векторного управления электроприводом на основе асинхронизированного вентильного двигателя. Саранск: Изд-во Мордовского университета, 2010.
- Ильинский Н. Ф. Регулируемый привод сегодня. Регулируемый электропривод. Опыт и перспективы применения // Доклады научно-практического семинара, 2 февраля 2006 г., Москва. М.: Изд-во МЭИ, 2006.
- Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. М-Л.: Госэнергоиздат, 1963.
- Ляпин А. С. Модельное исследование динамики электропривода с машиной двойного питания и прямым управлением моментом // Научно-технический вестник информационных технологий, механики и оптики. 2014. Вып. 4(92).
- Онищенко Г. Б., Локтева. И. Л. Асинхронные вентильные каскады и двигатели двойного питания. М.: Энергия, 1979.
- Соколовский Г. Г. Электропривод переменного тока с частотным регулированием. М.: ACADEMIA, 2006.
- Слежановский О. В., Дацковский Л. Х., Кузнецов И. С., Лебедев Е. Д., Тарасенко Л. М. Системы подчиненного регулирования электроприводов переменного тока с вентильными преобразователями. М.: Энергоатомиздат, 1983.
- Усольцев А. А. Частотное управление асинхронными двигателями. СПб.: Изд-во ИТМО, 2000.
- Хватов С. В., Титов В. Г., Поскобко А. А. Асинхронно-вентильные нагружающие устройства. М.: Энергоиздат, 1986.
- Хватов С. В. Электрооборудование промышленных установок // Труды Нижегородского государственного технического университета, 2002.
- Bogalecka E. Zagadnienia sterowania maszyną dwustronnie zasilaną pracującą jako prądnica w systemie elektroenergetycznym. Prace Naukowe Wyższej Szkoły Morskiej w Gdyni. Gdynia, 1997.
- Depenbrock M. Direct Self-Control (DSC) of Inverter-Fed Induction Machine // IEEE Transaction On Power Electronics. 1988. Vol. 3, № 4.
- Hopfensperger B., Atkinson D. J. and Lakin R. A. Stator-flux-oriented control of a doubly-fed induction machine with and without position encoder. IEE Proc.-Electr. Power Appl. July 2000. v 147, No. 4.
- Vilsboll N. Analysis of Advantages of the Double Supply Machine with Variable Rotation Speed Application in Wind Energy Conversion // DEWI-Magazin, 1999. August.
- Kaźmierkowski M. P., Tunia H. Automatic Control of Converter-Fed Drives. ELSEVIER. Amsterdam-London-New York-Tokyo, 1994.
- Takahashi I., Noguchi T. A New Quick-Response and High-Efficiency Control Strategy of an Induction Motor // IEEE Transaction On Industry Application. 1986. Vol. 22, № 5.
- Krzemiński Z., Sensorless multiscalar control of double fed machine for wind power generators. Osaka, Japonia. PCC, 2002.
- Peresada S., Tilli A., Tonielli A. Indirect stator flux-oriented output feedback control of the doubly fed induction machine // IEEE Trans. on Control Systems Technology. November 2003. Vol. 11, No. 6.
- Peresada S., Tilli A., Tonielli A. Power control of a doubly-fed induction machine via output feedback // Control Engineering Practice. 2004. Vol. 12, No. 1.
- Peresada S., Tilli A., Tonielli A. Robust Output Feedback Control of a Doubly-Fed Induction Machine. Proceedings of the 25th Annual Conference of the IEEE Industrial Electronics Society. IEEE-IECON’99, San Jose, CA, USA, November 29 — December 3, 1999.
- Peresada S., Tilli A., Tonielli A. Indirect Stator Flux-Oriented Output Feedback Control of the Doubly-Fed Induction Machine // IEEE Transactions on Control Systems Technology. November 2003. v 11, no. 6.
- Peresada S., Tilli A., Tonielli A. Power Control of a Doubly-Fed Induction Machine via Output Feedback // Control Engineering Practice. January 2004. v 12, no. 1.
- Peresada S., Tilli A., Tonielli A. Robust Active-Reactive Power Control of a Doubly-Fed Induction Generator. Proceedings of the 24th Annual Conference of the IEEE Industrial Electronics Society, IEEE-IECON’98. Aachen, Germany, August 1998.
- Peresada S., Tilli A., Tonielli A. Dynamic Output Feedback Linearizing Control of a Doubly-Fed Induction Motor. Proceedings of the IEEE International Symposium on Industrial Electronics, IEEE-ISIE’99. Bled, Slovenia, July 12–16, 1999.
- Petersson A. Analysis, modeling and control of doubly-fed induction generators for wind turbines. Licentiate thesis. Chalmers University of technology, Department of Electric Power Engineering. Goteborg, Sweden, 2003.
- Popow O. S. Elementy teorii systemów — systemy dynamiczne. Politechnika Szczeсińska, Wydzial Informatyki. Szczecin, 2005.
 14 марта, 2015
14 марта, 2015 11 октября, 2007
11 октября, 2007 6 июля, 2016
6 июля, 2016