
ШКОЛА MATLAB. Урок 33. Энергетические характеристики гибридной генераторной установки с асинхронной машиной с фазным ротором
Введение
Генераторные установки, в которых несколько источников энергии работают на общую нагрузку, получили название гибридных. Гибридные генераторные установки (ГГУ) широко используются в автономных системах электроснабжения (АСЭ) [4, 7, 8. 9, 33]. Эти системы не имеют постоянного соединения с промышленными сетями, а источники энергии в них, как правило, имеют соизмеримые мощности. Именно эта специфика автономных систем с гибридными генераторными установками вызывает ряд проблем при проектировании, среди которых наиболее актуальными являются проблемы синхронизации источников энергии, проблемы оптимального разделения мощностей между источниками, проблемы анализа устойчивости всей автономной системы, проблемы исключения обменных колебаний между источниками и др. [16–19, 21, 23, 24, 29]. На сегодня не разработана обобщенная методика решения перечисленных проблем, они решаются применительно к конкретным автономным системам. В данной статье исследуется гибридная генераторная установка переменного тока, в которой предусмотрено два первичных источника энергии:
- Механический вал с переменной скоростью вращения, связанный с асинхронным генератором, построенным на базе асинхронной машины с фазным ротором (АМФР).
- Аккумуляторная батарея. Предложена система управления, позволяющая поддерживать в нагрузке стабильную частоту и напряжение при изменении скорости вращения генератора и при изменении нагрузки.
История создания электромеханических систем с асинхронной машиной с фазным ротором насчитывает уже многие десятилетия [1, 2, 10, 13, 20–22, 25–27]. Первоначально эти машины использовались при построении мощных электроприводов с ограниченным диапазоном регулирования, поскольку в таких системах мощность регулятора в роторной цепи машины, равная мощности скольжения, составляет несколько процентов от выходной мощности. С возрастанием требований к расширению диапазона регулирования отмеченное преимущество электроприводов с АМФР постепенно теряло свое значение, а сложности в построении системы управления возрастали, нивелируя отмеченное преимущество АМФР. Кроме того, произошли революционные изменения в устройствах силовой электроники, в их системах управления, в создании новых модульных конструкций электрических машин. Поэтому интерес к построению электроприводов на базе АМФР значительно ослаб. Однако в дальнейшем преимущества АМФР проявились при построении генераторных установок с переменной скоростью вращения вала. К таким установкам относятся ветрогенераторы, судовые валогенераторы, авиационные турбогенераторы, генераторы электрического и гибридного автотранспорта и т. д. В связи с этим интерес к построению генераторных установок с АМФР вновь возник, свидетельством чему являются публикации последнего времени [5, 7, 11, 14, 15, 28, 32].
Функциональная схема гибридной генераторной установки с асинхронной машиной с фазным ротором
Классическая схема построения гибридной генераторной установки (ГГУ) с АМФР содержит в роторной цепи машины два активных полупроводниковых преобразователя (АПП), разделенных звеном постоянного тока с емкостным фильтром. Один АПП подключен к роторным обмоткам АМФР, другой — к статорным обмоткам. Такая структура получила название машины двойного питания (МДП) [13].
В автономных системах электроснабжения, где используются накопители энергии постоянного тока (аккумуляторы, суперконденсаторы), в генераторной установке переменного тока достаточно использовать только один АПП, подключенный к роторным обмоткам АМФР [6].
Функциональная схема такой ГГУ приведена на рис. 1. Она содержит асинхронную машину с фазным ротором (АМФР), трехфазный активный полупроводниковый преобразователь с системой управления (СУАПП). В цепи питания АПП включен источник постоянного тока (аккумуляторная батарея — АБ). Статорные обмотки асинхронной машины подключаются непосредственно к нагрузке, в которой поддерживаются постоянными напряжение и частота (U1 = const, f1 = const) при изменении скорости вращения вала машины и изменении нагрузки.

Рис. 1. Функциональная схема гибридной генераторной установки с АМФР
При анализе электромагнитных и электромеханических процессов и расчете энергетических и динамических характеристик систем, в которых управление электрической машиной осуществляется от полупроводникового преобразователя, следует различать процессы, связанные с передачей мощности, и процессы, связанные с энергетическим обменом.
Передача мощности в таких системах осуществляется на частоте модуляции, эта частота часто называется основной составляющей. Для замкнутых систем эта составляющая (частота) зависит и от сигнала управления, и от значения переменных состояния системы.
В соответствии с теорией Булгакова [3], динамика и энергетика рассматриваемых систем определяются в основном передачей мощности и зависят от частоты модуляции. Электромагнитные и электромеханические процессы на частоте модуляции часто называют гладкими.
Электромагнитные и электромеханические процессы на частоте модуляции описываются дифференциальными уравнениями, обычно нелинейными.
Составленные дифференциальные уравнения для установившегося режима работы системы преобразуются в алгебраические, решая которые удается рассчитать электромагнитные и энергетические характеристики системы в установившемся режиме.
Обменные энергетические процессы в рассматриваемых системах осуществляются на несущей частоте, которая при современных технологиях изготовления полупроводниковых элементов достигает значения нескольких килогерц.
Электромагнитные и электромеханические процессы, связанные с преобразованием энергии на несущей частоте, вызывают в системе дополнительные пульсации напряжений, токов, момента и мощности. Несущая частота в современных замкнутых системах, как правило, изменяется в зависимости от значений переменных состояния. Электромагнитные, электромеханические и энергетические процессы на несущей частоте не поддаются математическому описанию. Для исследования влияния этих процессов на систему приходится создавать имитационную (виртуальную) модель, в которой рекурентная математика «спрятана» в библиотечных имитационных блоках. С использованием имитационной модели могут быть исследованы квазидинамические характеристики.
В установившемся режиме работы системы, когда скорость и момент на выходе системы неизменны, электромагнитные и энергетические характеристики системы, полученные на имитационной модели, принято называть квазиустановившимися.
Таким образом, полное исследование замкнутых гибридных генераторных установок включает планомерное решение следующих задач:
- Математическое описание системы по основной составляющей с учетом принятого закона управления.
- Составление системы алгебраических уравнений, расчет электромагнитных и энергетических характеристик ГГУ в установившемся режиме работы.
- Построение имитационной модели ГГУ. Исследование квазидинамических и квазиустановившихся процессов.
Описанный алгоритм исследования и расчета использован далее в статье.
Анализ электромагнитных установившихся процессов и расчет энергетических характеристик гибридной генераторной установки с асинхронной машиной с фазным ротором
Качественно энергетические свойства ГГУ с АМФР (рис. 1) можно выяснить предварительно, не проводя анализ электромагнитных процессов, если не учитывать потери в активных сопротивлениях машины и активного полупроводникового преобразователя.
В этом случае для стабилизации частоты напряжения (тока) в нагрузке частота тока в цепи ротора АМФР должна поддерживаться в соответствии с выражением:
![]()
где ω1 — требуемая угловая частота напряжения на нагрузке; ωm — угловая скорость вращения ротора АМФР; p — число пар полюсов.
Тогда механическая мощность на валу Pm и мощность в роторной цепи АМФР PR при принятом допущении определятся выражениями:

где s = (ω1 – pωm)/ω1 — скольжение; PL — мощность в нагрузке. Из выражений (1, 2) следует:
- при всех скольжениях мощность на выходе ГГУ (в нагрузке) равна алгебраической сумме механической мощности на валу машины и электрической мощности в роторной цепи машины;
- при положительных скольжениях в нагрузке складываются мощности от обоих источников и аккумулятор отдает энергию (разряжается);
- при отрицательном скольжении механическая мощность вала обеспечивает питание нагрузки и заряд аккумулятора;
- при скольжении, равном нулю, мощность в роторной цепи АМФР также равна нулю. В этом случае электрическая мощность в нагрузке ГГУ равна механической мощности на валу машины.
Электромагнитные процессы в АМФР по основной составляющей описываются известными уравнениями [22]:

Система уравнений, описывающая электромагнитные процессы машины в установившемся режиме по основной (полезной) составляющей [3] с использованием метода результирующего вектора [10], может быть получена из (3):

где ![]() — результирующий вектор тока в статоре машины (ток нагрузки);
— результирующий вектор тока в статоре машины (ток нагрузки); ![]() — результирующий вектор напряжения на нагрузке; ,
— результирующий вектор напряжения на нагрузке; , ![]() ,
, ![]() — приведенные результирующие векторы напряжения и тока ротора; RS, XS = ω1LS — активное сопротивление и индуктивное сопротивление статора; RR, XR = ω1LR — приведенные активное и индуктивное сопротивления ротора; Xm = ω1Lm — индуктивное сопротивление ветви намагничивания; RL, XL = ω1LL — активное и индуктивное сопротивления нагрузки ω2 = ω1 – pωm— угловая частота токов в роторе.
— приведенные результирующие векторы напряжения и тока ротора; RS, XS = ω1LS — активное сопротивление и индуктивное сопротивление статора; RR, XR = ω1LR — приведенные активное и индуктивное сопротивления ротора; Xm = ω1Lm — индуктивное сопротивление ветви намагничивания; RL, XL = ω1LL — активное и индуктивное сопротивления нагрузки ω2 = ω1 – pωm— угловая частота токов в роторе.
В дальнейшем для АПП выбрано токовое управление [2] в роторной цепи АМФР, а в качестве базового вектора выбран ток статора ![]() , являющийся током нагрузки. При таком законе управления токи ротора, представляющие собой токи на выходе АПП, определятся из уравнений:
, являющийся током нагрузки. При таком законе управления токи ротора, представляющие собой токи на выходе АПП, определятся из уравнений:

Проекции напряжения нагрузки на вращающиеся оси X, Y находят из уравнений:

Проекции напряжения ротора на вращающиеся оси X, Y находят из уравнений:

Момент машины при выбранном управлении равен:

Мощности в статорной (в нагрузке) и роторной цепях, а также мощность в цепи постоянного тока рассчитываются по уравнениям:

Механическая мощность на валу машины равна:
![]()
Энергетические характеристики ГГУ с АМФР, рассчитанные по уравнениям (7–10), приведены на рис. 2–4.

Рис. 2. Энергетические характеристики гибридной генераторной установки с АМФР:
а) механическая мощность на валу АМФР;
б) мощность в цепи постоянного тока
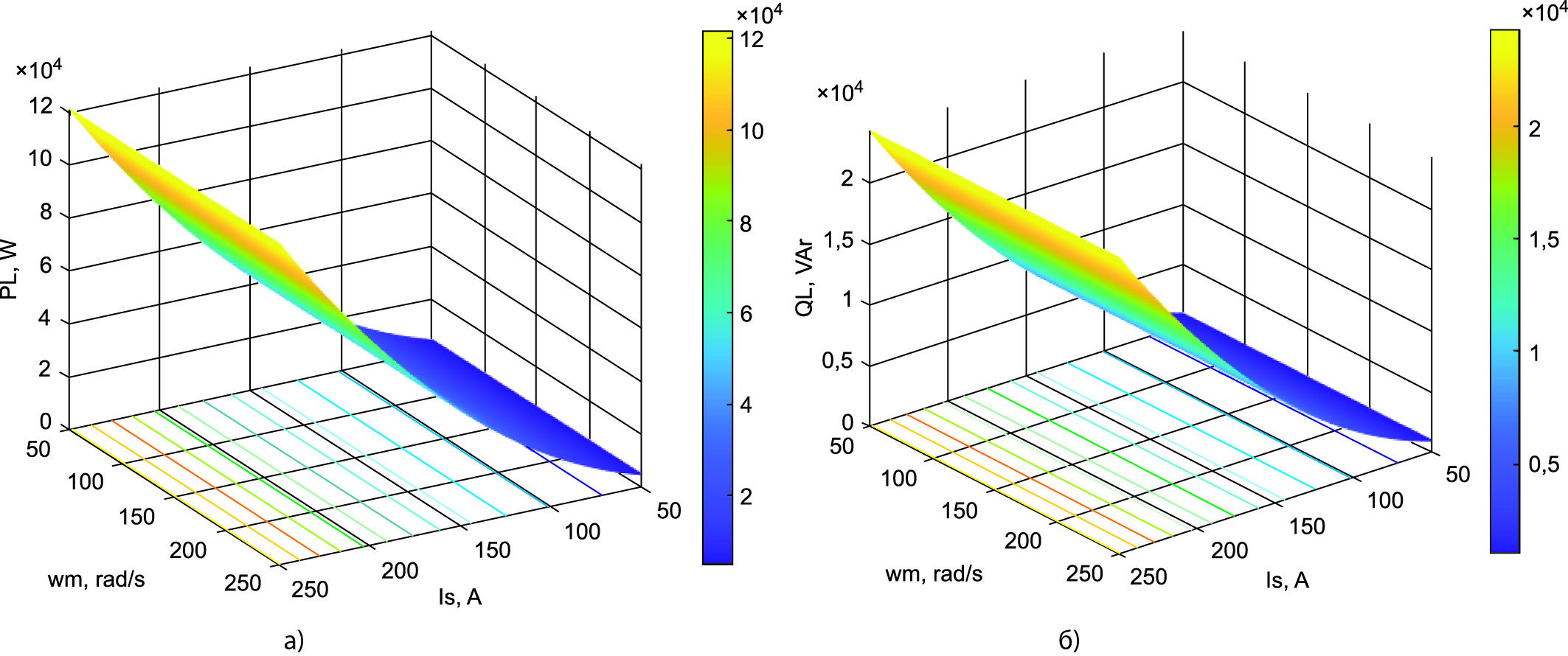
Рис. 3. Энергетические характеристики гибридной генераторной установки с АМФР:
а) активная мощность в нагрузке;
б) реактивная мощность в нагрузке

Рис. 4. Энергетические характеристики гибридной генераторной установки с АМФР:
а) активная мощность в роторной цепи АМФР;
б) реактивная мощность в роторной цепи АМФР
Расчеты осуществлены для асинхронной машины, параметры которой приведены в таблице.
|
Pнам |
Uнам |
fнам |
Rs |
Lsi |
RR |
Lri |
Lm |
p |
|
кВт |
В |
Гц |
Ом |
мГ |
Ом |
мГ |
мГ |
|
|
160 |
400 |
50 |
0,01379 |
0,152 |
0,007728 |
0,152 |
7,69 |
2 |
Проекции рассчитанных мощностей на основную плоскость представляют собой зависимости между током нагрузки и скоростью вращения вала машины, при которых соответствующая мощность постоянна.
Механическая мощность на валу машины (рис. 2а) во всем диапазоне изменения тока нагрузки и скорости принята отрицательной. Эта мощность растет с ростом скорости и тока. При этом ее зависимость от скорости практически линейна, а от тока нагрузки — нелинейна (близка к экспоненциальной).
Мощность в цепи постоянного тока (рис. 2б) отрицательна, когда источник отдает мощность (аккумулятор разряжается), и положительна, когда источник потребляет мощность. Из характеристики (рис. 2б) видно, что аккумулятор отдает в нагрузку мощность при малых скоростях вращения вала генератора и потребляет при больших скоростях. На скорости холостого хода w0 = (2p × 50)/p = 157 (1/c) мощность, потребляемая от аккумулятора, равна нулю. В этом режиме работы в нагрузку поступает мощность только с вала генератора.
Активная и реактивная мощности в нагрузке (рис. 3) не зависят от скорости и растут (нелинейно) с увеличением тока нагрузки.
Мощность в роторной цепи АМФР практически равна мощности источника постоянного тока (аккумуляторной батареи), так как потери в обмотках ротора достаточно малы.
Построение имитационной модели ГГУ. Исследование квазиустановившихся и квазидинамических процессов
Имитационная (виртуальная) модель ГГУ приведена на рис. 5 и 6. Модель содержит силовую, управляющую и измерительную части.

Рис. 5. Имитационная модель гибридной генераторной установки с АМФР
Силовая часть содержит АМФР (Asynchronous Machines), АПП, включенный в роторную цепь АМФР (Universal Bridge2), изменяющуюся нагрузку (блоки RL Load, R Load, Three-Phase Breaker), блоки для измерения токов и напряжений (Three Phase RLC Branch1, Three Phase RLC Branch2, Filtr1).
Управляющая часть представлена блоком Control System. Модель управляющей части показана на рис. 6.
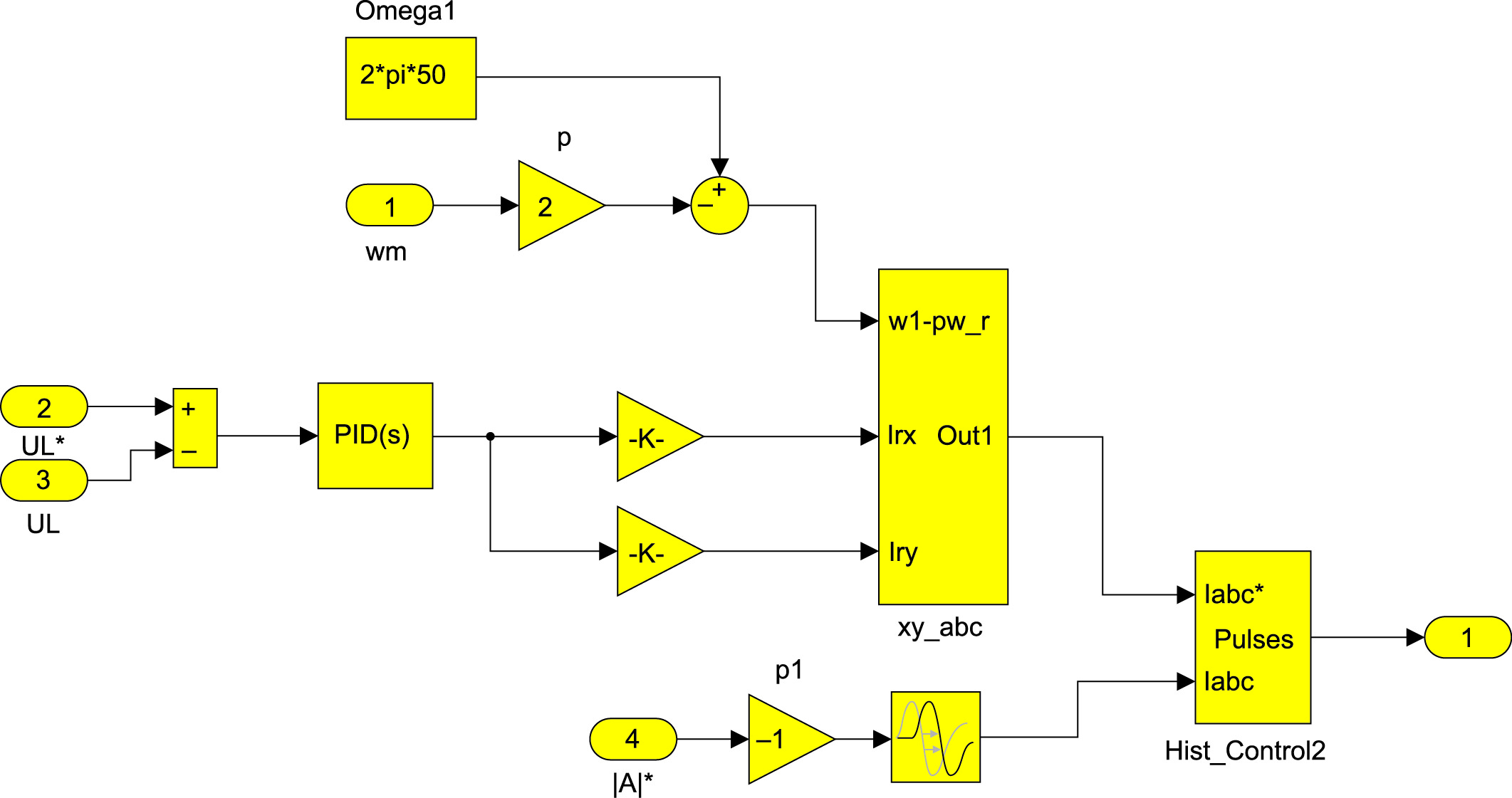
Рис. 6. Имитационная модель системы управления гибридной генераторной установки с АМФР
В управляющей части рассчитывается частота тока в роторе машины по уравнению (1).
По заданному току статора Is рассчитываются токи ротора по уравнению (5), при этом заданный ток статора формируется на выходе ПИ регулятора, сигналом задания которого является разность заданного действующего фазного напряжения на нагрузке (230 В) и действительного напряжения.
В блоке xy_abc реализуется преобразование Парка — Горева [30, 31].
Блок Hist_Control2 является релейным регулятором, реализующим токовое управление АПП.
Энергетические процессы в гибридной генераторной установке с АМФР представлены на рис. 7. Эти процессы определяются при моделировании в нескольких заданных режимах работы:
- При постоянной скорости 100 рад/с и мощности 60 кВт на интервале времени до 0,5 с (квазиустановившийся режим).
- При постоянной скорости 100 рад/с и увеличении нагрузки от 60 до 120 кВт в момент t = 0,5 с (квазидинамический режим).
- При постоянной скорости 100 рад/с и мощности 120 кВт на интервале времени 0,5–1 с (квазиустановившийся режим).
- При возрастании скорости от 100 до 250 рад/с в момент t = 1 c и постоянной нагрузке 120 кВт (квазидинамический режим).
- При постоянной скорости 250 рад/с и мощности 120 кВт на интервале времени 1–1,5 с (квазиустановившийся режим).
- При постоянной скорости 250 рад/с и уменьшении нагрузки от 120 до 60 кВт в момент t = 1,5 с (квазидинамический режим).
- При постоянной скорости 250 рад/с и мощности 60 кВт на интервале времени 1,5–2 с (квазиустановившийся режим).

Рис. 7. Энергетические процессы в гибридной генераторной установке с АМФР
В течение первых трех режимов, при низкой скорости (100 рад/с) в нагрузке складываются мощность механическая и мощность, потребляемая от аккумуляторной батареи (аккумулятор разряжается). При этом возрастание тока нагрузки компенсируется возрастанием тока аккумуляторной батареи.
При большой скорости вала (250 рад/с) мощности механической достаточно как для снабжения нагрузки, так и для заряда аккумулятора. Следует при этом заметить, что изменение скорости вращения вала не приводит к изменению мощности в нагрузке в квазиустановившемся режиме.
Результаты определения мощностей в квазиустановившихся режимах, полученные при моделировании (рис. 7), достаточно точно совпадают с результатами аналитического расчета установившихся режимов (рис. 2–4).
Электромагнитные процессы в ГГУ представлены осциллограммами:
- напряжением нагрузки;
- током нагрузки;
- основной составляющей тока АПП.
Эти процессы показаны на рис. 8–10 и соответствуют всем семи рассмотренным режимам работы.

Рис. 8. Электромагнитные процессы в гибридной генераторной установке с АМФР при постоянной скорости 100 рад/с и увеличении нагрузки от 60 до 120 кВт

Рис. 9. Электромагнитные процессы в гибридной генераторной установке с АМФР при возрастании скорости от 100 до 250 рад/с и постоянной нагрузке 120 кВт

Рис. 10. Электромагнитные процессы в гибридной генераторной установке с АМФР при постоянной скорости 250 рад/с и уменьшении нагрузки от 120 до 60 кВт
Заключение
В гибридной генераторной установке переменного тока с АМФР, построенной в соответствии с функциональной схемой (рис. 1), при принятом законе управления напряжение и частота в нагрузке остаются стабильными при изменении скорости вращения вала машины и изменении мощности в нагрузке.
Принятый закон управления АПП, реализующий, по сути, структурный синтез системы управления в роторной цепи [34], включает:
- Реализацию токового управления («токового коридора») АПП в роторной цепи АМФР.
- Задание частоты тока в роторе АМФР в соответствии с уравнением (1).
- Выбор базового вектора тока статора и определение управляющих значений токов ротора в соответствии с уравнением (5).
При реализации всех перечисленных условий гибридная генераторная установка переменного тока с асинхронной машиной с фазным ротором выполняет все предписанные ей требования.
- Ботвинник М. М., Шакарян Ю. Г. Управляемая машина переменного тока. М.: Наука, 1969.
- Бродовский В. Н., Иванов Е.С. Приводы с частотно-токовым управлением. М.: Энергия, 1974.
- Булгаков А. А. Новая теория управляемых выпрямителей. М.: Наука, 1970.
- Васьков А. Г., Тягунов М. Г. Распределенные системы энергоснабжения на основе гибридных энергокомплексов с установками возобновляемой энергетики // Новое в российской электроэнергетике. 2013. № 4.
- Герман-Галкин С. Г. Аналитическое и модельное исследование асинхронной машины с фазным ротором при положительных скольжениях // Электротехника. 2015. № 7.
- Герман-Галкин С. Г. Виртуальные лаборатории полупроводниковых систем в среде Matlab — Simulink. СПб: Лань, 2013.
- Гуляев И. В., Тутаев Г. М. Системы векторного управления электроприводом на основе асинхронизированного вентильного двигателя. Монография. Саранск, изд-во Мордов. ун-та, 2010.
- Долуденко А. Н., Жораев Т. Ю., Новиков А. Н., Новиков Н. Л., Шакарян Ю. Г. Разработка многофункционального энергетического комплекса на основе гибридной ветродизельной установки с накопителем энергии.
- Ермоленко Г. В., Ермоленко Б. В., Фетисова Ю. А. Оптимизация схем децентрализованного энергоснабжения с использованием возобновляемых источников и накопителей энергии // Энергия: экономика, техника, экология. 2013. № 12.
- Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. Пер. с нем. М.-Л.: Госэнергоиздат, 1963.
- Мещеряков В. Н., Муравьев А. А. Асинхронный генератор на базе машины двойного питания // Известия СПбГЭТУ «ЛЭТИ». 2016. № 4.
- Мещеряков В. Н., Безденежных Д. В. Возможности машины двойного питания в отношении двухзонного регулирования // Электротехнические комплексы и системы управления. 2010. № 1.
- Онищенко Г. Б., Локтева И. Л. Асинхронные вентильные каскады и двигатели двойного питания. М.: Энергия, 1979.
- Клочков С. Е., Завьялов В. М. Особенности применения асинхронизированного синхронного генератора. Сборник докладов 4-й международной научно-практической конференции в рамках выставки «Энергосбережение. Отопление. Вентиляция. Водоснабжение». Екатеринбург, изд-во УМЦ УПИ, 2015.
- Клочков С. Е., Завьялов В. М. Особенности режимов работы асинхронизированного синхронного генератора. Сборник докладов всероссийской научно-практической конференции с международным участием «Повышение эффективности производства и использования энергии в условиях Сибири». Иркутск, изд-во УМЦ УПИ, 2015.
- Коваленко П. В., Коваленко В. В., Степанов С. Ф. Система обеспечения параллельной работы генераторов различной мощности на общую шину постоянного тока // Вестник СГТУ. 2012. № 2 (66). Вып. 2.
- Липужин И. А. Исследование устойчивости ветро-дизельного комплекса с использованием имитационного моделирования. Материалы докладов X международной молодежной научной конференции «Тинчуринские чтения»: под общ. ред. ректора КГЭУ Э.Ю. Абдуллазянова. В 3 т. Т. 2. Казань, КГЭУ, 2015.
- Липужин И. А., Семерикова М. В. Критерии устойчивости автономных энергосистем. XXII Нижегородская сессия молодых ученых. Технические науки: мат. докладов. Том II: НГИЭУ, 2017.
- Лукутин Б. В., Суржикова О. А., Шандарова Е. Б. Возобновляемая энергетика в децентрализованном электроснабжении. М.: Энергоатомиздат, 2008.
- Плесков В. И., Хватов С. В., Дерюжкова Н. Е., Сахаров В. Л. Исследование асинхронного реверсивного привода с частотным управлением со стороны ротора // Труды Горьковского политехнического института. 1969. Т. 25. № 15.
- Cавенко А. Е., Голубев А. Н. Обменные колебания мощности в судовых электротехнических комплексах. Иваново, 2016.
- Слежановский О. В., Дацковский Л. Х., Кузнецов И. С., Лебедев Е. Д., Тарасенко Л. М. Системы подчиненного регулирования электропривода переменного тока с вентильными преобразователями. М.: Энергоатомиздат, 1983.
- Соснина Е. Н., Шалухо А. В., Липужин И. А. Исследования устойчивости изолированных систем электроснабжения с ветро-дизельными электростанциями. Труды II международной научно-технической конференции «ПромИнжиниринг». Челябинск, ЮУрГУ, 2016.
- Соснина Е. Н., Шалухо А. В., Липужин И. А. Оценка устойчивости локальной системы электроснабжения с ветро-дизельной электростанцией на основе имитационного моделирования. Электроэнергетика глазами молодежи: труды VI межд. науч.-техн. конф. В 2 т. Т 1. Иваново, ФГБОУВПО ИГЭУ им. В.И. Ленина, 2015.
- Хватов С. В., Титов В. Г., Поскобко А. А. Асинхронно-вентильные нагружающие устройства. М.: Энергоиздат, 1986.
- Хватов С. В. Электрооборудование промышленных установок. Труды Нижегородского государственного технического университета, 2002.
- Bogalecka E. Zagadnienia sterowania maszyną dwustronnie zasilaną pracuącą jako prądnica w systemie elektroenergetycznym. Prace Naukowe Wyższej Szkoły Morskiej w Gdynia, 1997.
- Łuszczyk T., Iwanski G.. Control of a Doubly Fed Induction Generator at Grid Voltage Imbalance // Power Electronics and Drives. 2017. Vol. 2 (37). No. 2.
- Bottrell N., Prodanovic M., Green T. Dynamic stability of a microgrid with an active load // IEEE Trans. Power Electron. 2013. No. 28 (11).
- Gorev A. A.: Transient processes of synchronous machine/ Leningrad – Moscow: State Energy Publishing House (Gosenergoizdat), 1950.
- Park R. H. Two-reaction Theory of Synchronous Machines-II // AIEE Transactions. June 1933. Vol. 52.
- Analysis of Advantages of the Double Supply Machine with Variable Rotation Speed Application in Wind Energy Conversion // DEWI-Magazin. 1999.
- Saad M. K., Zoghby H. M., Bendary F. M., Elissa M. M. Hybrid wind-diesel power systems stabilization using STATCOM and genetic algorithm optimization technique // International Journal of Electrical and Power Engineering. 2014. No. 8 (1).
- Popov O. S. Elementy teorii systemów — systemy dynamiczne. Politechnika Szczecińska, Wydział Szczecin, 2005.
 5 сентября, 2011
5 сентября, 2011 13 мая, 2020
13 мая, 2020 5 февраля, 2021
5 февраля, 2021