
Виртуальные модели асинхронного двигателя
Покажем, что между схемой замещения АД и теорией обобщенной электрической машины имеется тесная связь, а наиболее удобным инструментом для решения задач динамики является программная система MATLAB Simulink.
На рис. 1 изображены схемы замещения АД. Первая схема (рис. 1а) справедлива в неподвижных системах координат a, b, c и α, β. Вторая (рис. 1б) описывает процессы во вращающихся системах координат u, V; x, у d, q. Будем рассматривать общий случай, когда система координат вращается с произвольной скоростью ωк. В приведенных схемах предполагается, что переменные и параметры ротора приведены к числу витков статора.

Рис. 1. Схема замещения АД:
а) в неподвижных;
б) во вращающихся системах координат
Обмотки статора и ротора находятся в магнитном поле, вращающемся со скоростью ωс. Вращение машины и системы координат будем учитывать с помощью добавочных ЭДС вращения, которые для получения уравнений обобщенной электрической машины из схем замещения АД должны определяться следующим образом:
Положительные направления для этих ЭДС необходимо принять совпадающими с направлением токов статора и ротора. В частном случае, когда система координат неподвижна, дополнительная ЭДС вводится только в ротор и
Рассмотрим математическое описание процессов в неподвижных системах координат. Проходя последовательно вдоль контуров в схеме на рис. 1а, получаем уравнения для напряжений в контуре статора и ротора:
Если для контура ротора напряжение U0 выразить через главное потокосцепление Ψ0, то оно принимает вид:
Первый и последний члены этого уравнения в сумме характеризуют ЭДС самоиндукции, наводимую в роторе потокосцеплением Ψ2,
С учетом (2) уравнение для контура ротора может быть записано в следующем виде:
Таким образом, электромагнитные процессы в одной фазе описываются системой уравнений:

В системе уравнений (3) скорость ω входит в состав угловой частоты скольжения ω2 =ωс-ω. Если в качестве переменной принимать эту частоту, то расчет электромагнитных процессов можно выполнять без учета механического процесса по методике, предложенной в [1, 2], не переходя к теории обобщенной электрической машины. Процессы можно рассчитывать и путем компьютерного моделирования в соответствии с теорией обобщенной электрической машины.
Взаимную ориентацию переменных во временной области удобно рассматривать с помощью векторной диаграммы на рис. 2. На этой диаграмме учитывается добавочная ЭДС в роторе и выполнены дополнительные построения в предположении, что ω<ωс. Процессы будут более понятными, если указать физическую сущность отдельных составляющих.

Рис. 2. Векторная диаграмма АД в двигательном режиме
Выражение jΨ1ωc = -Е1 представляет собой ЭДС самоиндукции, наведенную в статоре потокосцеплением Ψ1, в комплексной форме записи. Во временной форме эта ЭДС записывается как e1(t) = dΨ1(t)/dt. На векторной диаграмме она действует встречно напряжению U’1.
Выражение jΨ2ωс представляет собой ЭДС самоиндукции, наведенную в роторе потокосцеплением Ψ2. Во временной форме это выражение принимает вид e2(t) = -dΨ2(t)/dt. Выражение -jΨ2ω = Едоб 2 представляет собой ЭДС вращения, наводимую в роторе потокосцеплением Ψ2.
Из (3) и рис. 2 следует, что при неподвижном роторе ω = 0 ток в роторе I’2 = -jΨ2ωс/R’2 потребляется от источника питания. Знак минус характеризует фактическое направление тока I’2. Часть I1 идет на создание тока возбуждения I0, а другая его часть, того же направления, передается в ротор для создания полезной мощности. При вращающемся роторе появляется добавочная ЭДС (2), ток в р оторе_пропорционален частоте скольжения I’2 = -jΨ2(ω2-ω)/R’2. В режиме идеального холостого хода (ω = ωс) он становится равным нулю.
Перейдем к схеме замещения на рис. 1б. Проходя, как и раньше, последовательно по контурам, получим:
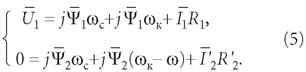
Выразив U0 через потокосцепление Ψ0 и выполнив простые преобразования с учетом (1), получим:

В правой части этих уравнений присутствуют ЭДС двух видов с разной физической сущностью: jΨ1ωc, jΨ2ωc — ЭДС самоиндукции, наводимые периодически изменяющимися токами статора и ротора; jΨ1ωc, jΨ2(ωк-ω) — ЭДС вращения или ЭДС взаимоиндукции с учетом взаимодействия с другими фазами. Эти ЭДС как раз и являются добавочными ЭДС.
Векторная диаграмма на рис. 2 отражает процессы в одной фазе. Для создания электромагнитного момента обязательно нужна еще одна или две фазы. В этом случае состояния переменных рассматривают с помощью пространственных векторных диаграмм. Направим вдоль действительной оси «+», совпадающей с геометрической осью фазы «А», единичный вектор α. Вдоль мнимой оси «j» расположим геометрическую ось второй фазы «B» и единичный вектор β. Одно из достоинств ортогональных систем координат состоит в том, что модули временных и пространственных векторов одинаковы. В этом случае временные и пространственные векторные диаграммы принимают одинаковый вид, изменяется лишь обозначение для переменных. На временной диаграмме переменная отмечается точкой над переменной, на пространственной диаграмме — чертой сверху. Изменив обозначение переменных на рис. 2, получим пространственную векторную диаграмму.
Если теперь сравнивать процессы во временной и пространственной областях, то они будут совершенно разные. В пространственной области изображающие вектора вращаются относительно геометрических осей отдельных фаз и отражают процессы во всех фазах. Во временной области вектора вращаются только относительно комплексной плоскости и отражают процессы только в одной фазе. Если их поведение рассматривать относительно геометрической оси рассматриваемой фазы, то они пульсируют во времени.
Определенные неудобства возникают в 3-фаз-ной неподвижной системе координат a, b, c. В этой системе координат модули временных и пространственных векторов разные, появляются масштабные коэффициенты 3/2 и 2/3.
Так как в ортогональных системах координат модули временных и пространственных векторов принимаются одинаковыми, то от временной формы записи изображающих векторов (4) можно перейти к математическому описанию процессов в пространственной области:
Эти уравнения являются основополагающими в теории обобщенной электрической машины. Таким образом, путем простых преобразований установлена связь между схемой замещения и теорией обобщенной электрической машины. Эта связь стала возможной благодаря введению в схему замещения добавочных ЭДС, которые описываются выражениями (1) и (2).
В качестве примеров использования полученных результатов рассмотрим составление виртуальных моделей АД на основе его схем замещения. Наиболее простой является модель в системе координат α, β (рис. 3а). Для ее составления следует взять для каждой фазы по схеме замещения. В пространстве эти схемы должны располагаться по двум взаимно ортогональным осям α и β. Модель содержит виртуальную часть (блоки А и В) и математическую. Модель одной фазы (фазы А) показана в раскрытом виде (рис. 3б). На вход блока поступает напряжение ua = ua1 = Umcosωct. В качестве выходных переменных выступают токи на отдельных участках схемы замещения: ток статора ia1 и ток ротора ia2.

Рис. 3. Схема:
а) модели АД в системе координат α, β;
б) модель фазы А
Аналогичные явления протекают и в другой фазе, смещенной в пространстве под углом 90 электрических градусов. В ней на вход поступает напряжение: ub= uβ = Umsinωct. В качестве выходных переменных принимаем ток статора ίβ1 и ток ротора ίβ2.
Электромагнитный момент для данной модели вычисляется по формуле
Μ = 3/2*pПL0(iβ1iα2-iα1iβ2),
где рп—число пар полюсов АД. Дополнительные ЭДС по осям α и β вычисляются по формулам:
Εα2 = -(L0iβ1+L2iβ2)ω,
Εβ2 = -(L0iα1+L2iα2)ω.
На рис. 4 приведены кривые переходных процессов. Расчет проводился для двигателя 4А200Г4 мощностью 45 кВт при статическом моменте на валу двигателя Мс = 160 Н-м. На рис. 4а напряжение, подводимое к двигателю, прикладывается скачком. На начальном участке имеются колебания электромагнитного момента. На рис. 4б напряжение на начальном участке повышается плавно с помощью устройства плавного пуска.

Рис. 4. Процессы в асинхронном двигателе:
а) при скачкообразном приложении напряжения;
б) при плавном пуске
Благодаря этому удается существенно уменьшить амплитуду колебаний электромагнитного момента. После разгона в обоих случаях прикладывается статический момент.
Модель 3-фазной машины (рис. 5) содержит три блока со схемами замещения для каждой фазы. От ранее рассмотренной эта модель отличается наличием прямых и обратных координатных преобразователей I1_abc_αβ, I2_abc_αβ и E2_αβ_abc.

Рис. 5. Модель АД в системе координат a, b, c
Модель 2-фазной машины в системе координат x, у приведена на рис. 6а. Здесь добавочные ЭДС (1) вводятся в статор и ротор и вычисляются по формулам:


Рис. 6. Схема модели АД:
а) в системе координат x, y;
б) модели фаз
Электромагнитный момент вычисляется по формуле:
Μ = 3/2*pПL0(iy1ix2-ix1iy2),
В основу модели положена схема замещения АД (рис. 1б). Модели фаз x и у (функциональный блок А) раскрыты на рис. 6б.
Рассмотренная методика может иметь определенный интерес, в первую очередь, в учебном процессе — по той причине, что достаточно просто и наглядно позволяет выполнить переход от схемы замещения к теории обобщенной электрической машины. Приведенные модели хорошо согласуются с реальными физическими явлениями, их можно использовать при решении самых разнообразных задач, в частности, при анализе коммутационных процессов с помощью силовых полупроводниковых ключей.
- Ямамура С. Спирально-векторная теория электрических цепей и машин переменного тока. Санкт-Петербург. 1993.
- Ямамура С. Спирально-векторная теория электрических машин переменного тока // Электротехника. 1996. № 10.
- Поздеев А. Д. Электромагнитные и электромеханические процессы в частотно-регулируемых асинхронных электроприводах. Чебоксары: Изд-во ЧГУ. 1998.
- Донской Н. В. Регулируемые электроприводы переменного тока. Чебоксары: Изд-во ЧГУ. 2007.
 6 сентября, 2012
6 сентября, 2012 4 августа, 2010
4 августа, 2010