

Исследование электромагнитных процессов в синхронных электродвигателях при импульсном управлении скоростью на основе визуально-математической модели
Синхронные двигатели обладают высокими энергетическими и эксплуатационными характеристиками: возможностью генерирования опережающего реактивного тока и его регулирования, а соответственно, компенсацией реактивного отстающего тока системы и уменьшением потерь энергии, высокой статической и динамической перегружаемостью, строго стабильной скоростью вращения.
Мощные синхронные двигатели находят широкое применение в различных областях промышленности, в том числе в качестве приводов турбокомпрессоров на магистральных газо- и нефтепроводах, на металлургических предприятиях, в качестве двигателей агрегатов собственных нужд на тепловых электростанциях и т. д. Однако при этом достаточно остро стоит проблема плавного пуска и управления скоростью вращения электродвигателя. Данная задача имеет два аспекта и заключается в следующем.
- Пуск такого двигателя от неподвижного состояния до синхронной скорости с целью его параллельного взаимодействия с сетью и последующего перехода на стационарный режим.
Наиболее распространенным и простым способом приведения механизма в движение является прямой асинхронный пуск при ненагруженном синхронном двигателе. Но асинхронный пуск обладает рядом серьезных недостатков — возникают большие опасные электрические, механические и тепловые перегрузки машины и сети. (Пусковой ток достигает 5–7-кратных значений от номинального.) Это приводит к значительному снижению надежности двигателей, особенно мощных. Посадка напряжения на шинах сети при пуске выходит за допустимые стандартом пределы.
Возможны и иные способы пуска — частотные посредством тиристорных преобразователей частоты и напряжения, посредством дополнительных двигателей и др., однако все они значительно удорожают и усложняют систему.
- Изменение скорости вращения нагруженного синхронного двигателя в технологических целях.
Для мощных производственных механизмов, приводимых во вращение синхронными двигателями — компрессоров, вентиляторов, насосов и других — наиболее целесообразным способом регулирования их производительности является изменение скорости вращения. Полезным стало бы создание экономичных тяговых приводов переменного тока с приемлемыми массогабаритными и стоимостными характеристиками.
В настоящее время изменение и регулирование скорости вращения синхронных двигателей выполняется их частотным управлением с использованием специальных регулируемых тиристорных преобразователей частоты и напряжения (ТПЧ), рассчитанных на полную мощность двигателя. Это весьма сложные устройства, которые по своим массогабаритным, материалозатратным, стоимостным характеристикам соизмеримы с двигателем, а иногда и превосходят таковые. Питание синхронных двигателей через такие промежуточные преобразователи ограничивает их естественные возможности, такие как устойчивость, перегружаемость, генерирование реактивной мощности и регулирование напряжения сети, а также создает дополнительные потери энергии.
Указанные обстоятельства практически исключают саму возможность регулирования скорости синхронных двигателей с помощью ТПЧ, особенно для мощных синхронных двигателей (мощностью порядка 1–20 МВт), в то время как именно для мощных синхронных двигателей задача регулирования скорости, в том числе их надежного пуска, наиболее актуальна. Частотный пуск синхронных двигателей посредством ТПЧ является частным случаем частотного управления скоростью со всеми изложенными недостатками.
Разработан принципиально новый способ импульсного пуска синхронных двигателей, который обеспечивает их плавный управляемый пуск при питании непосредственно от сети переменного тока практически без перегрузки машины и сети [1–3]. Массогабариты и стоимость оборудования импульсного пуска в несколько раз меньше, чем для известных устройств частотного пуска.
Изложенным способом может выполняться и другой аспект поставленной задачи, а именно регулирование и стабилизация скорости вращения нагруженного синхронного двигателя [4]. Отличие этой задачи от задачи пуска состоит в том, что к валу двигателя приложен нагрузочный момент и должна быть обеспечена возможность изменения и стабилизации скорости вращения на заданном уровне.
Импульсное управление скоростью синхронной машины выполняется по схеме, представленной на рис. 1. Обмотка якоря синхронной машины (СМ) соединяется непосредственно с сетью переменного тока через пары тиристоров (тиристорный коммутатор ТК). Обмотка возбуждения (ОВ) замкнута накоротко через диод (VD). Отпирающие импульсы тиристоров формируются в системе импульсно-фазового управления (СУ). Система управления соединена синхронизирующими связями с сетью и с датчиком положения ротора (ДПР).
Импульсный вращающий момент формируется и регулируется следующим образом (диаграмма на рис. 3). Сигналами датчика положения ротора включаются тиристоры соответствующей группы тиристорного коммутатора — анодной или катодной — так, чтобы протекающий импульс тока данного направления создавал положительный вращающий момент. Отпирающие импульсы тиристорам подаются в определенные моменты времени с определенной фазой — углом управления a относительно нулевой фазы напряжения сети U. При отпирании тиристора в обмотке якоря непосредственно от сети протекает единичный импульс тока, который синхронизирован с положением ротора. По завершении импульса тока, когда ток достигает нулевого значения, тиристор естественным образом запирается. При протекании импульсов тока происходит автоматическое самовозбуждение индуктора машины следующим образом [1, 5, 6]. При открытом состоянии тиристора тиристорного коммутатора, когда в обмотке статора протекает импульс тока, напряжение сети, приложенное к обмотке статора на интервале открытого состояния тиристора, трансформируется в обмотку возбуждения ротора. Эти импульсы напряжения создают в обмотке возбуждения импульсы тока.
Части импульсов тока, имеющие отрицательную полярность, которая возникает вследствие несимметрии импульсов напряжения, вызванной наличием противо-ЭДС и изменением углового положения ротора, срезаются короткозамыкающим диодом. На межимпульсном интервале, когда закрыты тиристоры тиристорного коммутатора и отсутствуют напряжения на обмотках статора и ротора, ток в обмотке возбуждения затухает в соответствии с постоянной времени обмотки возбуждения — она достаточно велика, поэтому затухание незначительно. Каждый последующий импульс тока начинается и нарастает с текущего значения тока возбуждения. Таким образом при импульсном управлении в двигателе возникает и поддерживается постоянный по направлению ток самовозбуждения, причем без использования внешних устройств возбуждения. Импульс тока, протекающий в обмотке статора, взаимодействуя с током возбуждения в обмотке возбуждения, создает импульс вращающего момента. Каждый импульс вращающего момента создает импульсное ускорение ротора, вследствие чего на интервале существования импульса скорость вращения ротора увеличивается. На межимпульсном интервале, когда отсутствует импульс вращающего момента, скорость вращения, при наличии момента сопротивления нагрузки, экспоненциально уменьшается. Посредством системы управления параметры импульсов токов (фаза, ширина, площадь) устанавливаются такими, чтобы момент количества движения, сообщенный импульсом вращающего момента, был больше момента торможения, созданного нагрузкой. В этом случае скорость вращения ротора импульсно-ступенчато увеличивается. Если указанные моменты будут уравновешены, то скорость вращения остается неизменной. Указанное управление скоростью выполняется автоматическим регулятором, который по цепи обратной связи воздействует на угол управления импульсов. Следует отметить, что при повышении нагрузки и соответствующем увеличении ширины импульсов тока статора естественным образом увеличивается и ширина импульсов наведенного в обмотку ротора напряжения и, следовательно, величина тока возбуждения. Таким образом при импульсном управлении обеспечивается и саморегулирование величины тока возбуждения посредством положительной внутренней обратной связи без помощи внешних возбудителей.
Изменением угла управления можно регулировать длительность, амплитуду, площадь импульсов тока в обмотке якоря и тока возбуждения в роторной обмотке и соответственно величину вращающего момента, а значит, и скорость вращения. Автоматическая стабилизация и изменение скорости вращения выполняется по цепи внешней обратной связи по скорости с воздействием на угол управления.
Величина импульсного момента, создаваемого импульсом тока, зависит от фазового положения ротора, при котором данный импульс тока протекает в обмотке якоря. Таким образом, величина импульсного вращающего момента зависит от положения импульса тока относительно разрешенного интервала на текущей пространственно-временной оси. Разрешенный интервал для импульсов тока данной полярности определяется положением ротора по сигналам датчика положения ротора.
Поскольку скорость вращения ротора в процессе пуска и при ее регулировании изменяется от нуля до номинальной, то соответственно изменяются длительности разрешенного интервала и относительные положения импульсов тока в пределах разрешенного интервала. Импульс тока может возникнуть и вблизи области переключения полярности разрешенного интервала, когда полюс ротора проходит нейтраль и в плоскости эквивалентного витка обмотки якоря полюс одной полярности сменяется полюсом другой полярности. Тогда импульс тока, начавшись в пределах разрешенного интервала, может закончиться за его пределами, то есть после прохождения ротором нейтрали. Причем импульс тока создает знакопеременный момент — часть импульса, расположенная в пределах разрешенного интервала, формирует вращающий момент, а часть импульса, выходящая за пределы разрешенного интервала — тормозной противомомент. В таком случае среднее значение момента уменьшается. Для избежания указанного уменьшения момента алгоритмически исключается прохождение тех импульсов тока, которые, попадая на стык разрешенного интервала, создают отрицательные средние импульсные моменты. Это достигается укорочением интервала управления (со стороны его окончания), когда разрешено прохождение импульсов на величину длительности импульса тока.
По мере повышения скорости и соответствующего сокращения разрешенного интервала увеличивается продолжительность алгоритмических запретов на прохождение импульсов. Вследствие этого механическая характеристика — зависимость создаваемого вращающего момента от скорости вращения — имеет убывающий от скорости характер [1, 4]. Рабочие параметры двигателя — вращающий момент, скорость, ток, мощность — должны располагаться под механической характеристикой, соответствующей данному углу управления и ширине импульсов.
Математическая модель указанного процесса образования импульсного движения приведена в [5] и для цельности изложения показана ниже:




![]()

где US, UM — соответственно напряжения сети и противо-ЭДС, LS — индуктивность сети, M(t) — функция момента импульса, C — конструкционная постоянная электродвигателя, g(t) — угол положения ротора, i(t) — функция импульса тока.
Разрешение для прохождения импульсов тока соответствующего направления формулируется следующим образом:
![]()
![]()
где wp — угловая частота вращения ротора, wpti — текущее угловое положение ротора, jpj — геометрический угловой сдвиг между осями обмоток фаз якоря (j1,4 = 0°, j2,5 = 120°,j3,6 = 240°), N — целое число, d1 — угловое смещение начала интервала управления относительно начала разрешенного интервала в сторону опережения, d2 — угловое смещение конца интервала управления относительно конца разрешенного интервала в сторону опережения.
Аналитическое исследование указанного процесса импульсного движения представляет значительные трудности.
На основе математической модели и пакета прикладных компьютерных программ разработана визуально-математическая модель системы импульсного управления скоростью синхронного двигателя (рис. 2) [7].
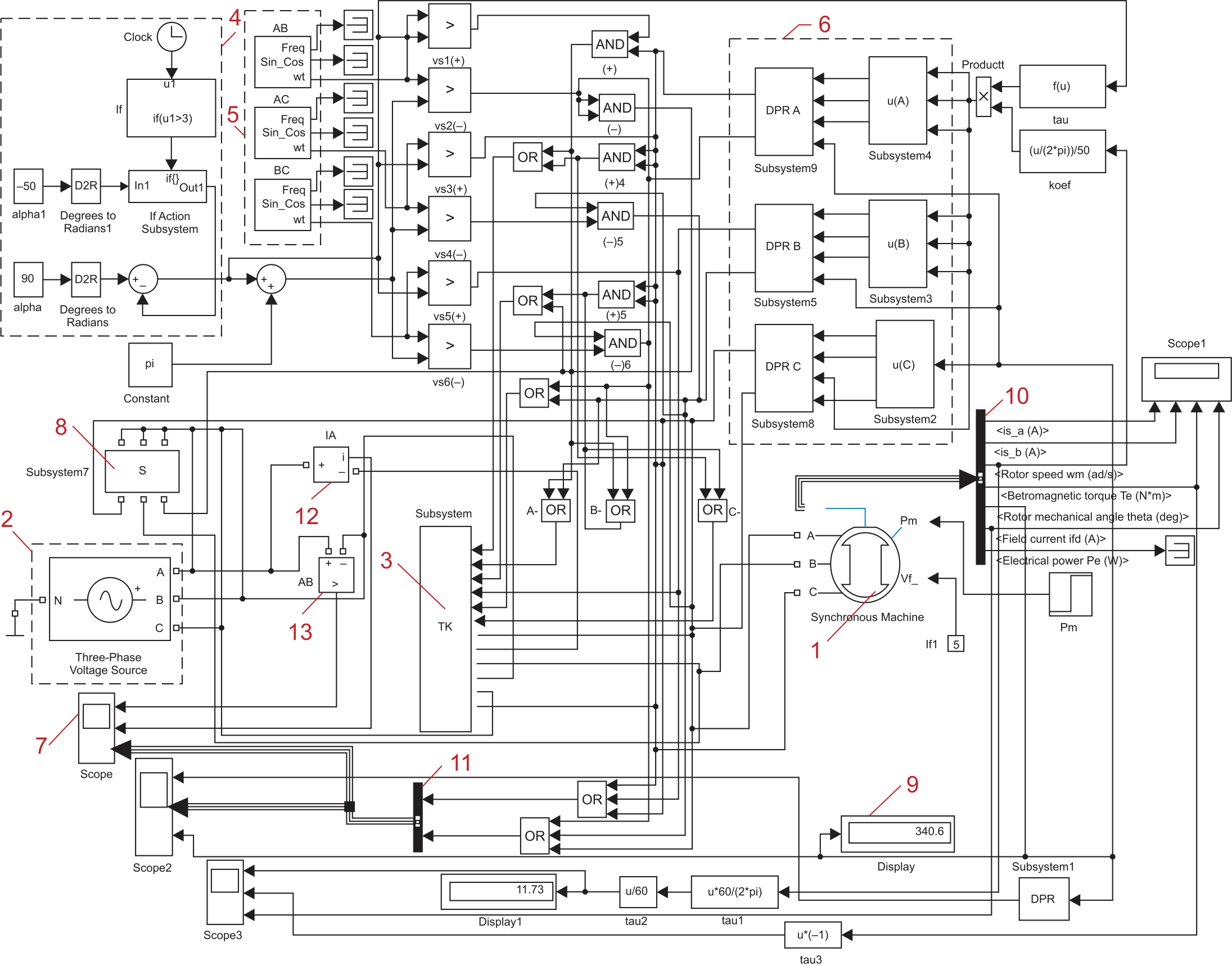
Рис. 2. Визуально-математическая модель системы импульсного управления скоростью синхронного двигателя
(1 — синхронный двигатель;
2 — трехфазная электрическая сеть;
3 — тиристорный коммутатор;
4 — система создания угла управления;
5 — генератор сигналов, синхронизированных с сетью;
6 — система обработки сигналов датчика положения ротора;
7 — осциллограф;
8 — выключатель;
9 — окно чтения текущего значения;
10 — разделитель сигналов;
11 — комбинатор сигналов;
12, 13 — измерительные приборы: амперметр, вольтметр)
Модель предназначена для имитации реальных или проектируемых систем импульсного управления синхронных двигателей и детального исследования протекающих в них электромеханических процессов с высокой степенью адекватности. Ниже приводятся полученные на модели результаты исследований ряда принципов, процессов и характеристик систем импульсного управления.
На рис. 3 приведена осциллоскопическая диаграмма создания импульсных токов в обмотке якоря, тока самовозбуждения в обмотке ротора и импульсных вращающих моментов в синхронном двигателе типа СТД-800 мощностью 800 кВт при скорости вращения, эквивалентной 10 Гц, при вышеизложенном алгоритме управления. Для наглядности процесса расчет выполнен при однофазной схеме включения двигателя (к сети через тиристорный коммутатор подсоединена одна фаза двигателя, две другие не подключены).

Рис. 3. Диаграмма процессов в синхронном двигателе типа СТД-800 мощностью 800 кВт при скорости вращения 10 Гц (U — напряжение сети; UM — напряжение на обмотке якоря двигателя; IM — ток в обмотке якоря; M — вращающий момент; Ifd — ток в обмотке возбуждения; ДПР — положение ротора)
Диаграмма подтверждает изложенный выше принцип образования импульсов тока и вращающего момента и устойчивого самовозбуждения двигателя. В начальной части интервала управления, когда угловое положение оси полюса ротора относительно плоскости эквивалентного витка обмотки якоря находится в пределах 0–p/2, импульс возбуждения наводится с положительным знаком, в завершающей части интервала управления — с отрицательным. При реально больших постоянных времени обмотки ротора средний ток возбуждения всегда имеет место — обеспечивается надежное самовозбуждение двигателя.
На рис. 4 приведены рассчитанные на модели осциллоскопические диаграммы при импульсном управлении синхронного двигателя типа СТД-800 мощностью 800 кВт при различных скоростях вращения 4,2; 15; 35 Гц.

Рис. 4. Диаграммы процессов в синхронном двигателе типа СТД-800 мощностью 800 кВт при скоростях вращения, рассчитанные на модели:
а) 4,2 Гц;
б) 15 Гц;
в) 35 Гц
На рис. 5 в качестве сравнения приведены осциллограммы реального процесса импульсного управления синхронного двигателя типа СТД-800 при тех же скоростях вращения 4,2; 15; 35 Гц, выполненные в [1].

Рис. 5. Осциллограммы реального процесса в синхронном двигателе типа СТД-800, мощностью 800 кВт при скоростях вращения:
а) 4,2 Гц;
б) 15 Гц;
в) 35 Гц (UM — напряжение на обмотке якоря двигателя; IM — ток в обмотке якоря; iM — ток в обмотке возбуждения; ДПР — положение ротора)
Визуальное сопоставление рассчитанных на модели и реальных осциллограмм подтверждает адекватность разработанной модели реальному процессу.
При импульсном управлении важное значение имеет величина колебания скорости вращения двигателя, вызванная пульсацией вращающего момента, и, соответственно, возможность расчета указанных колебаний. Со стороны потребителей зачастую выдвигаются жесткие требования по ограничению колебаний скорости вращения двигателя и приводимого механизма вплоть до полного исключения колебаний. Это обстоятельство может выдвигаться против самой идеи импульсного управления. Однако подобные требования представляются не вполне обоснованными и не столь принципиальными. Наше утверждение может быть обосновано следующим. В качестве приводных двигателей большого числа механизмов и агрегатов в технике широко используются поршневые двигатели внутреннего сгорания (поршневые компрессоры, автомобили, самоходные установки, строительно-дорожные машины, морские и речные суда, автономные дизельэлектрогенераторы и др.). По своему принципу действия поршневые двигатели внутреннего сгорания создают пульсирующий вращающий момент, однако это не является препятствием для их широкого применения. Объясняется это тем, что, с одной стороны, вращающиеся маховые массы агрегата в определенной степени сглаживают пульсации момента и скорости вращения; с другой — это косвенно подтверждает некритичность данного требования. Важной является частота пульсации — высокая частота вырождается в вибрацию (которая независимо от пульсации момента всегда имеет место в механических приводах), низкая частота пульсации приводит к автоколебаниям скорости, что более заметно. Кроме того, нелинейная, пульсирующая нагрузка сама приводит к колебаниям момента вращения и скорости, что принимается как неизбежное. Это происходит, например, в электромеханических приводах мельниц размельчения руды, в землеройных машинах.
Изложенные обстоятельства подтверждают необходимость исследования колебаний момента и скорости вращения двигателя при импульсном управлении.

Рис. 6. Характеристики разгона и стабилизации скорости синхронного двигателя типа СТД-800 мощностью 800 кВт при различных углах управления
На рис. 6, 7 приведены рассчитанные на модели характеристики разгона и стабилизации скорости синхронного двигателя типа СТД-800 мощностью 800 кВт при импульсном управлении: на рис. 6 — при различных углах управления, при неизменных моментах инерции ротора агрегата и неизменных моментах сопротивления (угол управления определяет параметры импульсов тока и момента — ширину, амплитуду, мощность), на рис. 7 — при различных моментах инерции ротора агрегата, при неизменных углах управления и неизменных моментах сопротивления.

Рис. 7. Характеристики разгона и стабилизации скорости синхронного двигателя типа СТД-800 мощностью 800 кВт при различных моментах инерции ротора
В характеристиках указаны зависимости мгновенных значений скорости от времени на интервале пуска от неподвижного состояния ротора до стабилизации скорости.
Частота пульсации момента (fn) и колебания скорости определена в [1] — она равна частоте скольжения ротора относительно вращающегося вектора напряжения сети:
fn = fc – fp, (9)
где fc — частота напряжения сети, fp — приведенная частота вращения ротора.
Величина пульсации вращающего момента зависит от угла управления.
Амплитуда колебаний скорости зависит от момента инерции ротора, угла управления и величины нагрузочного момента. В таблице приведены указанные зависимости, рассчитанные на модели.
|
Угол управления α, град. |
Момент нагрузки о.е. |
Скорость вращения f, Гц |
Момент инерции о.е.= J/Jном |
Колебание скорости |
|
|
Δf, Гц |
Δf, % |
||||
|
100 |
0,1 |
45 |
0,1 |
1 |
2 |
|
2 |
0,02 |
0,04 |
|||
|
1 |
5 |
0,1 |
0,4 |
8 |
|
|
2 |
0,05 |
1 |
|||
|
120 |
0,1 |
25 |
0,1 |
0,6 |
2,4 |
|
2 |
0,012 |
0,048 |
|||
|
1 |
5 |
0,1 |
0,26 |
5,2 |
|
|
2 |
0,03 |
0,6 |
|||
|
140 |
0,1 |
10 |
0,1 |
0,3 |
3 |
|
2 |
0,009 |
0,09 |
|||
|
1 |
5 |
0,1 |
0,12 |
2,4 |
|
|
2 |
0,002 |
0,1 |
|||
Примечания:
1. Величина нагрузки при заданной скорости определяет величину угла управления.
2. Относительные единицы (о.е.) моментов нагрузки и моментов инерции определяются как отношения соответствующих моментов к их номинальным значениям М/Мном, J/Jном.
3. Единица измерения скорости принята Гц [1/с] для эквивалентирования с электрическими процессами.
Анализируя все вышеприведенные характеристики, можно сделать следующие выводы.
- Посредством импульсного управления синхронного двигателя при питании его непосредственно от промышленной сети возможно изменение и регулирование скорости вращения.
- Интенсивность пуска и ускорение двигателя регулируются посредством угла управления и параметров импульсов. При этом, естественно, регулируется кратность пусковых и переходных токов (на осциллограммах не показаны).
- Разгон и стабилизация скорости вращения двигателя происходит в колебательном режиме «ускорения/замедления».
- Частота колебаний скорости равна частоте скольжения (разности частот сети и приведенной скорости вращения) — с повышением скорости частота колебаний уменьшается.
- Увеличение момента инерции ротора агрегата приводит к сглаживанию колебаний скорости.
Увеличение момента инерции агрегата может быть использовано для сглаживания и ограничения амплитуды колебания скорости. В двигателях внутреннего сгорания для этой цели в конструкции двигателя используются маховики. При необходимости импульсные двигатели также могут быть снабжены маховиками.
Вывод
Разработанная модель является удобным аппаратом исследования системы импульсного управления скоростью синхронного двигателя с высокой степенью адекватности.
- Давидян Ж. Д. Системы импульсного пуска мощных синхронных машин. — Ер.: Авторское издание, 2007.
- А.с. 1131002. СССР (Н02Р 1/50). Устройство для пуска синхронной машины / Ж. Д. Давидян, Г. Н. Тер-Газарян. — Б. И. — 1984. № 47.
- А. с. 1264291. СССР (Н02Р 6/02). Устройство для пуска синхронной машины / И. Е. Овчинников, Ж. Д. Давидян, В. Н. Рябов. — Б.И. — 1986. № 38.
- Давидян Ж. Д. Управляемый импульсный двигатель переменного тока // Моделирование, оптимизация, управление (Сборник научных трудов ГИУА), Ереван.— 2003. Выпуск 6. № 2.
- Давидян Ж. Д., Геворгян О. Г. Принцип импульсного самовозбуждения и момента синхронного двигателя // Вестник ГИУА — 76, Т. 1, № 1. — Ер.: Чартарагет, 2009.
- Копылов И. П. Электрические машины: Учебник для вузов / 5-е изд., стер., — М.: Высш. шк., 2006.
- Черных И. В. Моделирование электротехнических устройств в MatLab SimPowerSystems и Simulink / М.: ДМК Пресс, 2008.
 2 августа, 2010
2 августа, 2010 21 февраля, 2021
21 февраля, 2021