
Пиковый ток в изолированных драйверах затвора
Пример подключения изолированного драйвера затвора
Использование в схеме изолированного драйвера затвора позволяет не только установить нужный сдвиг уровня и ток для корректной работы силовых транзисторов, но и обеспечить необходимый уровень изоляции. Изоляционный барьер драйверов позволяет организовать безопасное управление транзисторами как верхнего, так и нижнего плеча. Пример такого драйвера показан на рис. 1. Выводы VDD1 и VDD2 находятся по разные стороны изоляционного барьера, причем значение напряжения на них может разниться. Далее в статье выводы 1–3 будут называться первичной стороной драйвера, а 4–6 — вторичной стороной. Уровень изоляции драйверов может легко достигать нескольких сотен вольт, что позволяет использовать его в высоковольтных системах без угрозы для компонентов, подключаемых к вторичной стороне.

Рис. 1. Пример подключения изолированного драйвера затвора ADuM4120
Правильно построенный изолированный драйвер должен иметь возможность без проблем воспроизводить управляющий сигнал, полученный на первичной стороне, и управлять затвором транзистора с достаточной скоростью, тем самым минимизируя переходной ток и напряжение в момент коммутации. Высокая скорость переключения транзистора снижает коммутационные потери, что также является немаловажным фактором для большинства приложений. Следует учитывать и тот факт, что чем больше мощности требуется для работы конечного устройства, тем выше токовая нагрузка на конкретный драйвер затвора.
Изолированные драйверы затвора достаточно часто используются в полумостовых конфигурациях, как показано на рис. 2. В данной конфигурации драйвер верхнего плеча должен иметь возможность переключаться между GND системы и напряжением VBUS, обеспечивая достаточную мощность для корректной работы нагрузки.
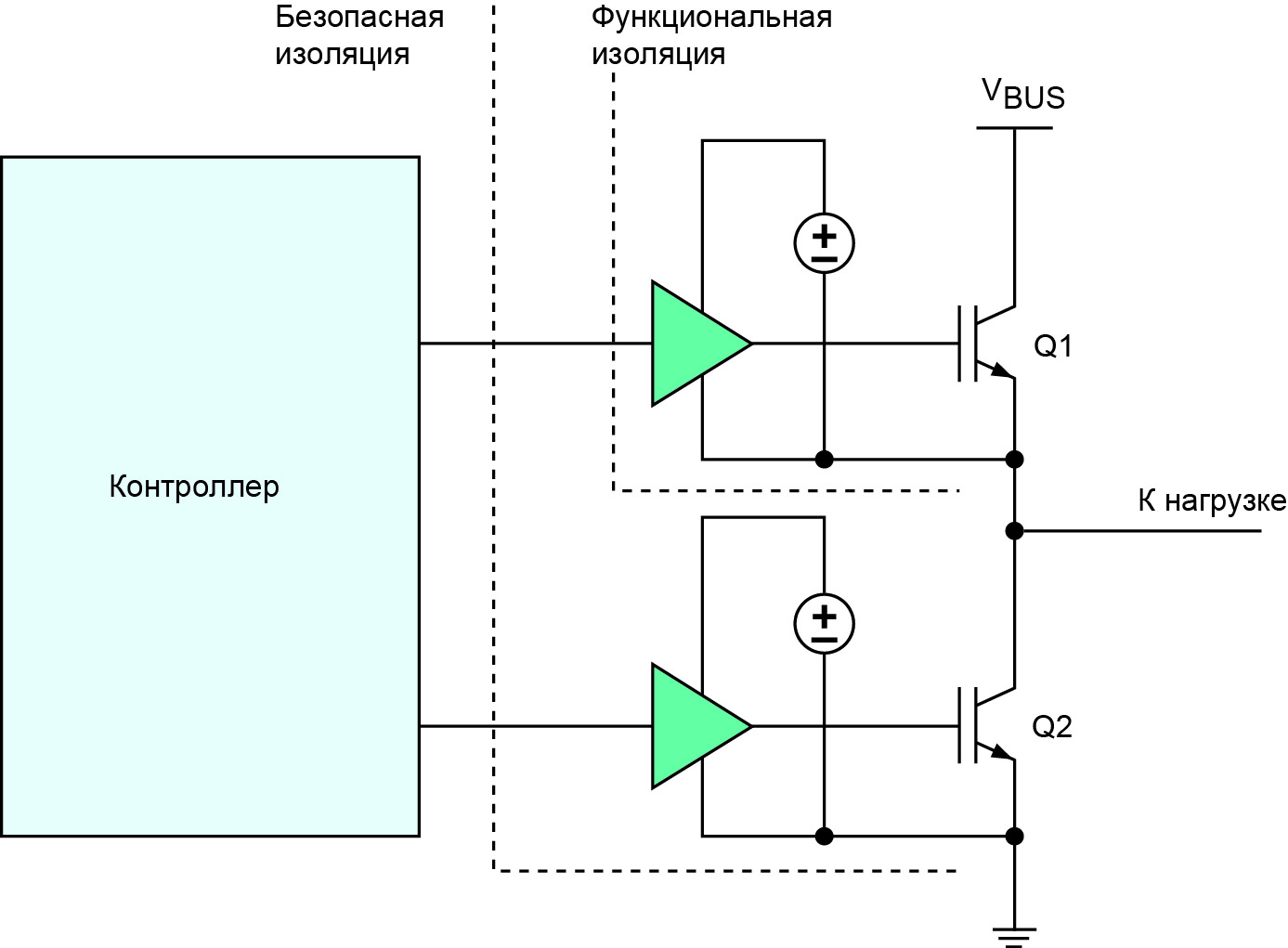
Рис. 2. Использование изолированных драйверов затвора в полумостовой конфигурации
Нагрузка на выходе драйвера
Время, требующееся для зарядки или разрядки емкости затвора MOSFET/IGBT, определяет скорость переключения компонента. Однако не стоит забывать, что при построении реальной схемы в цепь затвора добавляется последовательный резистор, необходимый для настройки времени нарастания и спада напряжения, а также рассеивания мощности. Если вместо силового транзистора взять конденсатор, который будет играть роль емкости затвора, то при установке резистора на выходе драйвера мы получим RC-цепочку, показанную на рис. 3. Пиковый ток драйвера в данной схеме будет определяться выражением:
(RDS (ON) _P + REXT),
а пиковый ток транзистора будет равен:
IPK_SNK = VDD / (RDS (ON) _N + REXT).
Для замера тока короткого замыкания REXT устанавливается на 0 Ом.

Рис. 3. RC-цепочка зарядки и разрядки емкости затвора транзистора,
где RDS (ON) _N — сопротивление включения NMOS драйвера затвора;
RDS (ON) _P — сопротивление включения PMOS драйвера затвора;
REXT — внешний последовательный резистор затвора;
CGATE_EQUIV — эквивалентная емкость транзистора
Неопределенность в значениях пикового тока
Пиковый ток является одной из важных характеристик драйверов затвора, однако его значение варьируется от компонента к компоненту и от производителя к производителю. На рис. 4 показаны вольт-амперные характеристики (ВАХ), а также некоторые общие уровни пикового тока, определенные самими производителями. Следует учитывать, что насыщение MOSFET может происходить при значениях тока, которые в зависимости от температуры могут отличаться в ±2 раза от указанного значения.

Рис. 4. ВАХ на выходе драйвера затвора MOSFET
Во многих сопутствующих документах пиковый ток является также и током насыщения компонента и определяется замыканием выхода драйвера на относительно большую емкость или кратковременным коротким замыканием. Достаточно редко в документации можно найти данные, которые бы четко показывали минимальную и максимальную ВАХ на выходе драйверов в зависимости от температуры или технологического процесса. Если брать за основу типовое значение тока насыщения, можно прийти к выводу, что в определенных условиях применение компонента станет невозможным из-за недостатка или, наоборот, преизбытка выдаваемой мощности. Иногда в документации также указывается максимальное или минимальное значение тока насыщения.
Один из методов задания пикового тока драйвера — приведение максимального значения тока в линейной области самой низкой кривой ВАХ, или, проще говоря, минимального линейного тока. И хотя данный параметр является довольно консервативным, ориентируясь на него при построении схем, разработчик может быть уверен, что при правильном подборе внешнего последовательного резистора затвора транзисторы на выходе драйвера не будут входить в режим насыщения при изменении температуры и технологического процесса в пределах, указанных в документации.
Проведение испытаний для выявления точных значений пикового тока довольно непростая задача из-за существующих токовых ограничений на контакторах, и нередко величина пикового тока в изолированных драйверах затвора определяется конструкцией и/или характеристиками самого компонента. В зависимости от производителя в документации может быть указано минимальное, максимальное или типовое значение пикового тока драйвера, в связи с чем не существует четкой политики, определяющей, какое их этих значений следует использовать для согласования компонентов схемы. Важно также понимать, что пиковый ток не является постоянным или средним током и при нормальной работе драйвера его номинальное значение будет присутствовать лишь в начальный момент переключения транзистора.
Несмотря на то, что графики, отображающие процесс насыщения при изменении температуры и технологического процесса, почти никогда не попадают в спецификации компонентов, некоторые производители изолированных драйверов затвора все-таки включают в документацию типовые ВАХ. Данный график может представлять собой как ВАХ в момент короткого замыкания, так и ВАХ, снятую с подключенным внешним последовательным резистором затвора, что с точки зрения производителей позволяет более корректно отобразить параметры компонента при его использовании в реальных приложениях. Следует также отметить, что при рассмотрении данного графика ось напряжения представляет собой значение VDD2, то есть напряжение на вторичной стороне драйвера, распределяемое между внутренним RDS (ON) и внешним последовательным резистором затвора.
На рис. 5 показаны вольт-амперные характеристики, взятые из документации на драйвер ADuM4121. Выходной ток драйвера ADuM4121 указан как 2 А, однако типичные токи насыщения обычно превышают 7 А. Столь большая разница в токах связана с тем, что при составлении документации использовалось то самое, консервативное определение пикового тока, равное минимальному линейному току, что позволяет разработчикам быть уверенными в способности данного компонента выдавать 2 А при любых температурах и технологических изменениях. Для имитации реальных условий работы отображенная на рис. 5 ВАХ была снята с подключенным внешним последовательным резистором затвора сопротивлением 2 Ом. Обобщая все вышесказанное, нужно отметить, что при построении схемы управления транзистором при помощи изолированного драйвера затвора одним из важных факторов согласования работы компонентов становится правильное определение значения пикового тока.

Рис. 5. ВАХ ADuM4121
Плато Миллера
В общем случае MOSFET и IGBT представляют собой емкостную нагрузку, однако существует некоторая нелинейность в ее значении, связанная с динамическим изменением емкости затвор-сток транзистора в зависимости от условий работы, что приводит к образованию так называемого плато Миллера (рис. 6). При нахождении на данном плато зарядный ток емкости затвора принимает максимальное значение. Указываемое в документации значение пикового тока, как правило, не учитывает этого эффекта, однако более высокий пиковый ток означает, что ток в области плато Миллера обычно будет больше.

Рис. 6. Плато Миллера в момент включения IGBT
Рассеивание мощности: основные соображения
Для зарядки и разрядки емкости затвора транзистора необходимо затратить определенное количество энергии. Если для анализа используется модель эквивалентной емкости и полная зарядка и разряд емкости затвора происходит в каждом цикле переключения, рассеиваемая мощность как для изолированных, так и для неизолированных драйверов затвора будет определяться по формуле:

где
PDISS — это мощность, рассеиваемая за один цикл переключения транзистора;
CEQ — эквивалентная емкость затвора;
VDD2 — напряжение на затворе транзистора;
QG_TOT — общий заряд затвора транзистора;
FS — частота переключения.
Важно отметить, что эквивалентная емкость затвора, CEQ, не совпадает по значению с CISS, указанной в характеристиках компонента. Данное значение обычно в 3–5 раз больше, чем CISS, и общий заряд затвора, QG_TOT, в данном случае является более точным ориентиром. Следует также отметить, что в этом уравнении отсутствует последовательное сопротивление затвора, поскольку оно относится только к общей мощности, рассеиваемой при переключении, а не к мощности, рассеиваемой исключительно внутри микросхемы драйвера затвора.
В соответствии с требованиями безопасности, области изолированного драйвера затвора должны быть разделены между собой определенным зазором и иметь соответствующую типу изоляции длину пути утечки. Любые гальванические проводники, расположенные между первичной и вторичной стороной изолятора, вычитаются из длины пути утечки, и поэтому достаточно редко можно встретить открытые контактные площадки изолированных драйверов затвора. Как следствие, это означает, что один из основных методов, позволяющих снизить тепловое сопротивление микросхем, становится недоступен, что повышает важность перенаправления мощности, которую необходимо рассеять, за пределы микросхемы драйвера и обеспечения возможности его работы при более высоких температурах окружающей среды.
Ввиду сложности добавления специального рассеивающего тепло элемента к изолированным драйверам затвора тепловое сопротивление микросхемы будет зависеть, главным образом, от количества выводов, внутренней металлизации, выводной рамки и размера корпуса. При использовании одного и того же форм-фактора размер корпуса, количество выводов и, как правило, распиновка будут одинаковыми, что приведет к примерно одинаковым значениям теплового сопротивления для компонентов от разных производителей.
Рассеивание тепла внутри микросхемы драйвера относится к тем факторам, которые влияют на температуру внутреннего перехода. Рассеиваемая мощность, вычисленная в уравнении 1, представляет собой общую рассеиваемую мощность, однако мощность, рассеиваемая в микросхеме самого драйвера, распределяется между внутренним сопротивлением RDS (ON) _N, RDS (ON) _P и внешним последовательным резистором затвора REXT. При работе драйвера затвора в линейной области коэффициент рассеивания мощности микросхемы будет определяться как:

В том случае, когда RDS (ON) _N = RDS (ON) _P = RDS (ON), выражение (2) можно упростить до вида:

Общую мощность, которую получает микросхема драйвера затвора в момент переключения транзистора, можно рассчитать путем перемножения уравнения (1) на выражение (3):

Из выражения (4) видно, что уменьшение значения RDS (ON) приводит к меньшей рассеиваемой мощности драйвера. При сохранении времени нарастания/спада номиналы RC-цепочки для зарядки и разрядки емкости затвора транзистора должны также сохранять свою величину. Сопротивление в RC-цепочке представляет собой сумму последовательно соединенных внутреннего RDS (ON) и внешнего последовательного резисторов затвора. Таким образом, при сравнении двух изолированных драйверов затвора от разных производителей с одинаковым временем нарастания/спада импульсов драйвер с более низким RDS(ON) позволяет использовать внешний последовательный резистор затвора большего номинала, сохраняя общее значение последовательного сопротивления в RC-цепочке на прежнем уровне, что означает меньшую рассеиваемую мощность внутри микросхемы драйвера.
Сравнение драйверов с различными значениями RDS (ON)
Для демонстрации разницы в значении пикового тока в зависимости от производителя, а также преимуществ более низкого значения RDS (ON) в изолированном драйвере затвора были выбраны три сходных по характеристикам компонента в полумостовой конфигурации, с выходным током 4 А. Все три драйвера (ADuM4221, конкурент №1 и конкурент № 2) имеют одинаковую длину пути утечки, зазор, распиновку и заземление, что позволяет использовать для теста один и тот же испытательный стенд. В качестве тестовой платформы выбрана оценочная плата ADuM4221 (рис. 7).

Рис. 7. Оценочная плата ADuM4221
Значения выходного тока и тока потребления испытываемых компонентов приведены в таблице 1.
|
Драйвер затвора |
Выходной ток, А |
Ток потребления, А |
|
ADuM4221 |
4 |
4 |
|
Конкурент № 1 |
2 |
4 |
|
Конкурент № 2 |
4 |
6 |
Если сравнивать значения, указанные в документации на выбранные компоненты, то может показаться, что конкурент № 2 должен был бы обеспечивать наибольшую выходную мощность, а значит, и самое быстрое время нарастания/спада импульсов. Для упрощения процесса тестирования транзисторы были заменены эквивалентной емкостью, выполненной в виде дискретного керамического конденсатора, в связи с чем на осциллограммах отсутствовало плато Миллера.
При проведении первого теста к каждому драйверу был подключен конденсатор емкостью 100 нФ через внешний последовательный резистор затвора номиналом 0,5 Ом по схеме, показанной на рис. 3. Драйверы однократно включались и выключались, чтобы сохранить рассеиваемую мощность на низком уровне. Данный тест, по сути, является тестом на измерение пикового тока в момент короткого замыкания. Результаты тестирования показаны на рис. 8, 9.

Рис. 8. Результат тестирования в момент включения при емкости 100 нФ с 0,5 Ом REXT:
а) напряжение драйвера в зависимости от времени;
б) зависимость тока драйвера от времени
На рис. 8 отчетливо видно, что скорость нарастания для исследуемых драйверов затвора достаточно сильно разнится. Как это ни странно, но драйвер с самым высоким заявленным пиковым током имеет самое длительное время нарастания. График зависимости тока от времени показывает, что все драйверы обеспечивают пиковое значение тока выше заявленного в характеристиках, за исключением драйвера «конкурент № 2». Если посмотреть на время спада, показанное на рис. 9, все три компонента работают относительно одинаково.

Рис. 9. Результат тестирования в момент выключения при емкости 100 нФ с 0,5 Ом REXT:
а) напряжение драйвера в зависимости от времени;
б) зависимость тока драйвера от времени
Несмотря на то, что пиковые токи одинаковы для всех трех продуктов, у драйвера, обозначенного как «конкурент № 2», минимальное устойчивое значение тока почти на 2 А выше, чем у других компонентов. В общем случае можно сказать, что все три исследуемых компонента показали сходные по форме характеристики. В то же время по результатам исследования можно отметить, что компонент, у которого значение пикового тока было заявлено выше остальных, в результате выдавал меньшую выходную мощность, чем конкурирующие решения.
Вторым этапом испытаний стала настройка драйверов так, чтобы время нарастания и спада было одинаковым для всех трех компонентов, после чего компоненты были включены в цепь для оценки их тепловых характеристик. Исходя из данных, отображенных на рис. 8, ADuM4221 имеет меньшее время нарастания, чем другие исследуемые компоненты, что позволяет использовать внешний последовательный резистор затвора с большим номиналом для соответствия времени нарастания двух других драйверов. Как результат, использование ADuM4221 в сочетании с последовательным резистором затвора номиналом 1,87 Ом позволяет в итоге получить такое же время нарастания, как при использовании драйвера, обозначенного как «конкурент № 1», в сочетании с резистором номиналом 0,97 Ом или драйвера «конкурент № 2» в сочетании с резистором 0,97 Ом. На рис. 10 показан результат второго этапа тестирования для всех трех драйверов.

Рис. 10. Время нарастания/спада для драйверов после подбора последовательных резисторов затвора.
Канал 1 — входной сигнал;
канал 2 — ADuM4221;
канал 3 — конкурент № 1;
канал 4 — конкурент № 2
Если время нарастания и спада настроено так, чтобы быть эквивалентным для всех трех исследуемых компонентов, то интегралы форм сигналов тока также будут сопоставимы, а потери переключения силового транзистора будут эквивалентны по значению в итоговом приложении. Однако использование внешнего последовательного резистора затвора большего номинала позволяет вывести часть тепловой нагрузки за пределы изолированного драйвера затвора. На рис. 11–13 показаны замеры температур для трех исследуемых компонентов, работающих при одинаковой температуре окружающей среды, с частотой переключения 100 кГц, напряжением VDD2 = 15 В и емкостью нагрузки 100 нФ.

Рис. 11. Температура драйвера ADuM4221

Рис. 12. Температура драйвера «конкурент № 1»

Рис. 13. Температура драйвера «конкурент № 2»
Перекрестие тепловизора на рис. 11–13 указывает на выход изолированных драйверов затвора. Яркое пятно справа от каждого из них — это внешний последовательный резистор затвора. На рисунках отчетливо видно, что последовательный резистор, используемый в сочетании с ADuM4221, нагрелся куда сильнее своих собратьев в сочетании с другими драйверами. Такой исход был ожидаем. Все три теста проводятся с одинаковой частотой переключения и одинаковой емкостью нагрузки, вследствие чего общая рассеиваемая мощность также имеет одинаковое значение. Тем не менее чем больше мощности рассеивается на внешних резисторах, тем меньше нагревается микросхема самого драйвера затвора.
В результате проведения теста микросхема драйвера «конкурент № 1» нагрелась на 35,3 °C больше, чем ADuM4221, что свидетельствует о более высокой степени ограничений, связанных с применением данного компонента из-за более высокого RDS (ON). Аналогичная ситуация произошла и с микросхемой драйвера «конкурент № 2», который нагрелся на 18,9 °C больше, чем ADuM4221. Результаты тестирования показывают важность учета RDS (ON) при выборе изолированных драйверов затвора транзистора, так как данный параметр может достаточно сильно отразиться на тепловых характеристиках компонента, что в конечном итоге может сказаться на работоспособности всего приложения при изменении температуры окружающей среды. Обобщенные результаты проведенного тестирования приведены в таблице 2.
|
Драйвер затвора |
REXT_ON, Ом |
REXT_OFF, Ом |
Температура микросхемы, °C |
|
ADuM4221 |
1,87 |
0,97 |
104,6 |
|
Конкурент №1 |
0,91 |
0,91 |
139,9 |
|
Конкурент №2 |
0,97 |
0,97 |
123,5 |
Заключение
В связи с тем, что значение пикового тока драйвера затвора транзистора, указанное в документации, может разниться для аналогичных компонентов в зависимости от производителя, построение схемы и расчет времени нарастания сигнала на основе указанных в характеристиках данных может привести к некоторым неточностям и нежелательным эффектам, таким как сокращение реального рабочего диапазона температур. Отсутствие корректных данных в документации способно вызвать утрату доверия к компоненту со стороны разработчиков и, как следствие, падение конкурентоспособности микросхемы на рынке. При сравнении микросхем драйверов следует убедиться, что пиковые токи, указанные в документации на компонент, сопоставимы с его реальными показателями. При выборе драйвера также следует учитывать запас по температуре, на который в свою очередь влияет значение RDS (ON): при выборе из двух драйверов с родниковым временем нарастания/спада, драйвер с более низким RDS (ON) позволит получить больший запас по температуре и большую гибкость при настройке частоты переключения.
 6 апреля, 2022
6 апреля, 2022 29 июля, 2015
29 июля, 2015