
Особенности контура регулирования тока при широтно-импульсном управлении
Введение
Контур регулирования тока как самостоятельная подчиненная система регулирования очень часто используется в электроприводе и в источниках вторичного электропитания [1]. Основная его задача — ограничение тока на допустимом уровне для защиты силовых элементов (тиристоров, MOSFET, IGBT) от перегрузки по току и полное использование их по току в переходных режимах для повышения быстродействия системы.
Высокая частота коммуникации силовых элементов статических преобразователей позволяет рассчитывать реальные импульсные системы по их непрерывным моделям. Однако возможны ситуации, в которых импульсный характер системы проявляется нежелательными субгармоническими автоколебаниями, приводящими к неравномерной загрузке силовых полупроводниковых элементов и к возможному выходу их из строя вследствие превышения допустимого тока. В выходных параметрах системы (скорости, угле поворота или напряжении) эти субгармонические автоколебания по причине их высокой частоты (в большинстве случаев всего в 2 раза меньшей частоты коммутации) практически незаметны.
Задача исключения субгармонических автоколебаний решается при расчете контура регулирования тока, поскольку основные контуры регулирования, значительно более инерционные, оказывают на возникновение субгармонических автоколебаний пренебрежимо малое влияние.
Для нахождения условия возникновения нежелательных автоколебаний необходимо рассмотреть контур регулирования тока как нелинейную импульсную систему, каковой он и является.
Ниже приведен анализ контура регулирования тока с учетом импульсного характера управления, выполненный с использованием элементарного математического аппарата и позволяющий понять физическую природу возникновения нежелательных колебаний и способы их устранения.
1. Математическая модель контура регулирования тока
С точки зрения строгого ограничения тока предпочтительным оказывается безынерционный (пропорциональный) регулятор тока. Поддержание же постоянного тока при изменении напряжения на нагрузке требует интегрального регулятора. Разрешить это противоречие удается за счет положительной обратной связи по напряжению, практически устраняющей зависимость тока от выходного напряжения UH. При крутизне напряжения развертки широтно-импульсного модулятора, пропорциональной напряжению питания Е, коэффициент усиления широтно-импульсного регулятора не зависит от Е, что исключает возможность самовозбуждения контура под действием положительной обратной связи по напряжению в случае увеличения E [1].
В качестве примера рассмотрим контур регулирования тока понижающего преобразователя напряжения постоянного тока, представленный на рис. 1. Широтно-импульсный преобразователь состоит из мощного полевого транзистора VT, обратного диода VD, сглаживающего фильтра, содержащего дроссель Др и конденсатор С, широтно-импульсного модулятора ШИМ с напряжением развертки, получаемым интегрированием напряжения питания Е, и драйвера Д. Пропорциональный регулятор тока выполнен на операционном усилителе ОУ. Задающее напряжение U3T на вход подчиненного регулятора тока подается с выхода регулятора напряжения преобразователя (на рис. 1 не показан), с датчика тока ДТ снимается напряжение обратной связи по току
U0C = RшI, (1)
где Rш — крутизна ДТ, имеющая размерность сопротивления.

Рис. 1.
С датчика напряжения ДН снимается сигнал положительной обратной связи по напряжению нагрузки.
U+ = æUн, (2)
где æ — крутизна ДН.
При описании процессов в контуре регулирования тока будем полагать, что он работает в режиме непрерывного тока.
Входное напряжение UЗТ и напряжение на нагрузке Uн положим постоянными, поскольку ток изменяется намного быстрее напряжения. Причина этого в малой индуктивности дросселя, необходимой для получения достаточно малых пульсаций тока, вследствие высокой частоты коммутации. Пренебрежем влиянием снабберных цепей, не показанных на рис. 1. Транзистор VT и обратный диод VD будем считать идеальными.
При этих допущениях ток дросселя Др i(t) в n-ом периоде коммутации nТ<t < nТ + τn линейно возрастает под действием разности напряжения питания E и напряжения на нагрузке Uн, приложенной к дросселю Др:
 (3)
(3)
где in = i(nТ) — значение тока в начале n-го периода коммутации, L — индуктивность дросселя Др. В момент закрытия транзистора VT ток принимает значение
 (4)
(4)
и до конца периода, то есть в течение времени nT+τn<t <(n+1) T, линейно уменьшается под действием напряжения Uн, приложенного к дросселю Др через обратный диод VD:
 (5)
(5)
В конце n-ого и начале n+1-го периода коммутации ток принимает значение
 (6)
(6)
Длительность подключения источника питания E к нагрузке (через дроссель Др) τn определяется моментом равенства величин выходного напряжения регулятора тока UРТ и пилообразного напряжения развертки ШИМ:
-UРТ (nT+ τn) + α τn = 0, (7)
где α — крутизна напряжения развертки.
Выходное напряжение регулятора тока составляет
 (8)
(8)
где

В момент закрытия VT t = nT + τn с учетом (4) имеет значение
 (9)>
(9)>
Подстановка UРТ (nT+ τn) в уравнение ШИМ (7) дает
 (10)
(10)
Таким образом, подставив значение τn в формулу (6), получаем уравнение, которое связывает значения тока в моменты, соответствующие началу соседних периодов коммутации (n+1-го и n-го). Это уравнение называется разностным:

Поскольку сверху величина τn ограничена предельным значением
τn < τmax , τmax < T, (14)
формула (10) справедлива при условии
(UЗТ + K + æ Uн — KiRmin)KPT≤ [α + KiRm KPT (E — Uн)/L] τmax ,
или
in> {[UЗТ+ K+ æUн] KРТ — [α + KiR шKРТ(E- Uн)/L] τmax}/ KiRш KРТ = Imin.
При in < Imin τn принимает предельное значение τn = τmax, а разностное уравнение контура согласно (4) имеет вид:
 (15)
(15)
Естественное ограничение величины τn снизу (τn > 0) приводит к тому, что при условии
in> (UРТ+ K+ æ U)/ KiRн = Imax, (16)
τn = 0. Согласно формуле (6) получаем разностное уравнение контура регулирования тока в виде:
 (17)
(17)
Разностное уравнение контура регулирования тока позволяет легко вычислить значения тока i ( nT) при n = 0, 1, 2,…, соответствующие началам последовательных периодов коммутации (или концам предыдущих периодов). Для этого достаточно задать начальное значение тока — значение тока в начале нулевого периода i(0) — и последовательным вычислением по формулам (11, 15, 17) определить все последующие значения i(nT), n = 1, 2, 3… Характер изменения тока внутри n-го периода коммутации определяется формулами (3, 5).
2. Желательный установившийся режим
Для нормальной работы контура необходимо, чтобы переходный процесс изменения тока заканчивался установившимся режимом, при котором ток в каждом периоде коммутации при постоянном задающем сигнале (UЗТ = const) изменялся бы одинаково. Следовательно, и значения тока в начале каждого периода должны быть одинаковыми:
in = in+1 = i∞, τn = τn+1 = τ∞ . (18)
Из уравнения (6) очевидно, что в установившемся режиме должно удовлетворяться условие
 (19)
(19)
В линейной зоне работы ШИМ (0 < τn < τmax) задающему воздействию UЗТ соответствует значение
 (20)
(20)
Из выражения (20) видно, что приращение UЗТ вызывает пропорциональное приращение i∞.
Среднее значение тока, или его постоянная составляющая, равная полусумме максимального и минимального значений тока в периоде коммутаций (рис. 2), определяется по формуле:
 (21)
(21)
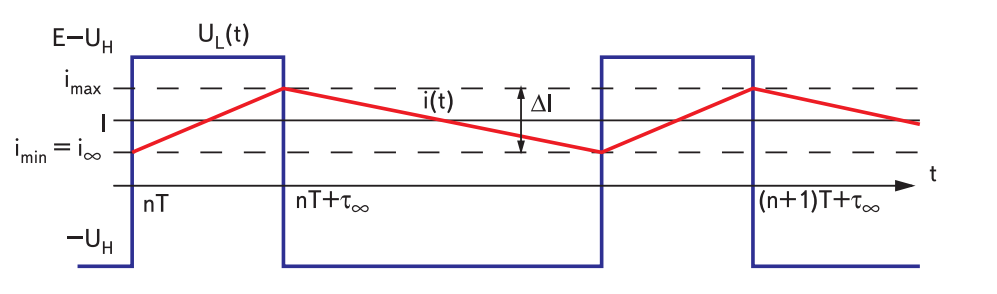
Рис. 2.
Очевидно, эта составляющая превосходит минимальное значение imin = i∞ на половину размаха пульсаций тока ΔI.
Подставляя в формулу (21) значения τ∞ и i∞ согласно выражениям (19) и (20), можно найти значение коэффициента положительной обратной связи по напряжению, необходимое для исключения влияния E и Uн на величину среднего значения тока. С учетом получения напряжения развертки ШИМ интегрированием напряжения питания Е интегрирующей RC-цепочкой с периодическим разрядом конденсатора а имеет значение α = Е /RC, а необходимое произведение коэффициентов æ K+ определяет формула
 (22)
(22)
где КП = RC/ Т- коэффициент усиления широтно-импульсного преобразователя по постоянному току,

При выполнении условия (22) получаем
 (23)
(23)
Рассчитанная по непрерывной модели контура регулирования тока, не учитывающей пульсации тока, необходимая величина К+æ имеет значение [1]
 (24)
(24)
совпадающее с точным значением только при γ∞ = 1. Вследствие этого при К+æ, рассчитанном по формуле (24), реальное значение I отличается от определяемого формулой (23) на величину
 (25)
(25)
Величина δI, согласно формуле (25), не превосходит обычно единиц процентов от максимального тока контура, что объясняется малым значением Т и, следовательно, малым размахом пульсаций. Таким образом, выбрав величину К+æ по формуле (24), то есть по непрерывной модели контура, получаем практическую независимость тока от Uн.
Можно показать, используя выражения (4), (19), (20) и (24), что при выполнении условия (24) в установившемся режиме максимальное значение тока в каждом периоде коммутации

Иное дело — существование желательного установившегося режима. По непрерывной модели контура определить условие существования этого режима невозможно.
3. Условие существования желательного установившегося режима
Для его определения рассмотрим графический способ решения разностного уравнения для контура регулирования тока. Построим график правой части уравнения, определяемый в зависимости от величины in одним из выражений (11, 15, 17).
На рис. 3 представлена зависимость in+1 = f (in), которая соответствует положительному значению λ, меньшему 1 (0< λ < 1). Пересечение графика с биссектрисой первого координатного угла, описываемой уравнением λ n+1 = λ n, дает установившееся значение тока i∞. Переходный процесс установления i∞ строится следующим образом. По графику in+1 = f ( in) для текущего значения in определяется следующее значение in+1. Затем, полагая in+1 за текущее значение, по тому же графику определяют следующее значение in+2. Для этого значение in+1 с оси ординат переносится на ось абсцисс через биссектрису первого координатного угла. Для нулевого начального значения тока (i0 = 0) процесс построен по описанному алгоритму на рис. 3. Там же построен процесс при iw < i ‘0 < < Imax без нанесения значений последовательности i’0, i’1, i ‘2,… на ось ординат.

Рис. 3.
Из проведенного графического анализа очевидно, что при 0 < λ < 1 значения тока монотонно возрастают при i0 < iw или убывают при i0 > i∞, неограниченно приближаясь к установившемуся значению i∞.
Для -1< λ < 0 на рис. 4 построен график функции in+1 = f(in) и аналогично предыдущему определена последовательность значений тока in: n = 0, 1, 2, 3,… при i0 = 0. Из рис. 4 видно, что значения in стремятся к i∞, причем, начиная со значений, достаточно близких к iw, каждое последующее значение in лежит с противоположной стороны от i∞ по отношению к предыдущему.

Рис. 4.
Особое положение занимает случай λ = -1 (рис. 5).

Рис. 5.
Из рис. 5 видно, что последовательность значений in не стремится к установившемуся значению i∞. Начиная с некоторого значения (в примере с i 2), в контуре устанавливаются субгармонические автоколебания: i2 = i4 = i6= …, i3 = i5 = i7 = …; τ 2 = τ 4 = τ 6 = …, τ 3 = τ 5 = τ 7 = … Очевидно, τ 2 < τ 3. Это означает, что на входе фильтра, состоящего из дросселя Др и конденсатора С, действует последовательность прямоугольных импульсов uф ( t) с чередующейся длительностью (рис. 6). Это вызывает появление во входном напряжении фильтра uф ( t) гармоники половинной частоты 1/(2Т). Пульсации тока возрастают, нагрузка VT становится неравномерной, максимальное значение тока возрастает.

Рис. 6.
Легко проверить, что амплитуда автоколебаний i2 — i∞ = i∞ — i3 зависит от начального значения i0. При i’0, например, амплитуда субгармонических автоколебаний, как показано на рис. 5, равна нулю, то есть они не проявляются.
При λ < -1 в контуре регулирования тока желательный установившийся режим существовать не может. Даже если при определенном начальном значении i0 (рис. 7) контур попадает в желательный установившийся режим i0, i 1 = iт = i2 = i 3 = …, длительное время это состояние наблюдаться не будет.

Рис. 7.
Достаточно небольшого отклонения от желательного установившегося режима δi, вызванного помехой или другим возмущением, чтобы в контуре начался переходный процесс, переводящий его из желательного установившегося режима в режим субгармонических автоколебаний (рис. 7).
Таким образом, для исключения нежелательных субгармонических автоколебаний контура регулирования тока необходимо и достаточно выполнить неравенство
 (26)
(26)
Из неравенства (26) следует эквивалентное ему условие
 (27)
(27)
В случае α = E/(RC) условие (27) принимает вид

и выполнить его нужно при максимально возможном значении γ.
Очевидно, при γ < 1/2 неравенство (27) выполняется при всех реальных (положительных) параметрах контура. Это значит, что при γ < 1/2 субгармонические колебания в контуре регулирования тока невозможны. Указанное обстоятельство имеет простой физический смысл, который несложно уяснить.
Для этого рассмотрим отклонения значений тока in от установившегося значения iw при 0 < τn < τmax. Вычитая из разностного уравнения (11) очевидное тождество
i∞ = λ i∞ + I,
получаем
δ in+1 = λδin, (28)
где δin+1 = in+1 — i∞, δin = in— i∞.
Из разностного уравнения для отклонений от установившегося режима (28) очевидно, что при -1 < λ < 1
 (29)
(29)
то есть каждое последующее отклонение от установившегося режима по величине меньше предыдущего. Это означает возвращение контура в установившийся режим при отклонениях от него, вызванных каким-либо возмущением (устойчивость установившегося режима). Из рис. 8, на котором показаны два закона изменения тока: установившийся iуст (t) и i(t), вызванный отклонением δin = in — i∞, очевидно выполнение неравенства (29) при
δ τ ‘n > δ τ »n. (30)

Рис. 8.
С учетом равенства
δ τ ‘n + δ τ »n = | δ τ n|
неравенство (30) можно записать в виде
δ τ ‘n > 1/2 |δ τ n|. (31)
Из треугольника abc с учетом угловых коэффициентов кривой тока в первой ((E-Uн)/L) и во второй (- Uн )/L) части периода коммутации легко выразить δ τ ‘n:
 (32)
(32)
Выражение (10) позволяет получить приращение длительности импульса в n-ом периоде коммутации, вызванное приращением тока δin:
 (33)
(33)
Легко оценить величину δ τ n
 (34)
(34)
Деление выражения (32) на (34) дает

откуда становится очевидным выполнение условия (31) при γ < 1/2.
4. Выбор величины λ
Среди множества значений λ, обеспечивающих существование (устойчивость) желаемого установившегося режима, наилучшим является значение
λ = 0, (35)
поскольку обеспечивает окончание переходного процесса в линейной зоне ШИМ (0 < τ n < τ max) всего за один период коммутации. На рис. 9 построен переходный процесс в контуре при λ = 0.

Рис. 9.
Из рис. 9 очевидно, что после попадания i2 в линейную зону ШИМ все остальные значения in, n = 3, 4, 5, … равны установившемуся значению i∞.
Приравняв (12) к нулю, получаем условие получения нулевого λ:
 (36)
(36)
Поскольку, как указано выше, α = E/RC, то (36) имеет вид
 (37)
(37)
Из (37) видно, что при изменяющемся значении входного напряжения E вследствие изменения γ = Uн /E можно получить γ = 0 только для фиксированного значения E (например, путем установки необходимой величины КPT). Это значение надо выбрать так, чтобы получить наиболее близкое к нулю значение γ при всех возможных величинах E.
5. Моделирование контура регулирования тока
Рассмотренный метод анализа контура позволяет понять характер процессов в нем, выяснить причины нежелательных субгармонических автоколебаний и способы их устранения. Однако использование графических построений ограничивает его точность и делает трудоемким. Значительно более точный и быстрый метод анализа процессов в контуре — математическое моделирование с использованием, например, системы MatLab-Simulink.
Построив математическую модель (рис. 10), можно легко исследовать влияние параметров контура на его свойства. В рассматриваемом случае более простой оказывается модель, не использующая элементы библиотеки Sim Power Sistem.

Рис. 10.
Широтно-импульсный модулятор состоит из генератора «пилы» и релейного элемента Relay. Генератор «пилы» построен на интеграторе (Integrator 1), периодически сбрасываемом на ноль. На его вход с блока Constant 3 подается значение α = E/RC. Период пилы (период коммутации в контуре) задается генератором Pulse Generator1. Разность сигнала управления и «пилы» подается на релейный элемент Relay с гистерезисной характеристикой. При нулевом входном сигнале Relay изменяет выходной сигнал со значения E/L на нулевое. Восстановление значения E/L происходит при достаточно большом положительном входном сигнале. Достаточный гистерезис реле исключает возможность повторного срабатывания в текущем периоде коммутации. Восстановление выходного сигнала E/L реле производится коротким импульсом генератора Pulse Generator, сбрасывающим одновременно «пилу» на ноль в начале периода. Амплитуда импульса превосходит сумму минимального входного сигнала реле и его гистерезиса. Ограничение ширины импульсов модулятора (τ < τmax) производится за счет ограничения управляющего сигнала блоком Saturation.
Разность выходного сигнала Relay и сигнала блока Constant 1, равного Uн /L, подается на вход интегратора (Integrator), выходной сигнал которого дает значения тока. Регулятор тока представлен сумматором Sum 2, блоками усиления Gain, Gain 1, Gain 2 и блоком Constant 2. Коэффициенты усиления блоков равны соответственно КPT, æK+L и KiRш. С выхода блока Constant 2 поступает сигнал задания UЗТ.
При практическом использовании модели необходимо особо внимательно отнестись к выбору параметров моделирования, например, ограничить максимальный шаг моделирования так, чтобы на период коммутации Т приходилось достаточное количество точек.
В качестве примера приведены результаты моделирования контура при следующих значениях его параметров: Т= 32×10-6 с, Е = 160 В, Uн = 100 В, L = 11×103 Гн, КiRш = 2 Ом, R = 5,6×105 Ом, С= 1,1×10-9 Ф,

Для оптимального значения λ = 0 рассчитаны необходимый коэффициент

и значение

На рис. 11 представлены осциллограммы отработки скачка задающего воздействия контура UЗТ = 2 В при нулевых начальных условиях, полученные с помощью осциллографа Scope. Масштабирующий усилитель Gain 3 с коэффициентом L/E позволил уменьшить амплитуду импульсов на выходе широтно-импульсного преобразователя со 160 до 1. Из рис. 11 видно, что в конце шестого периода переходный процесс входит в линейную зону и, начиная с седьмого периода, наблюдается установившийся режим работы. Отклонение среднего значения тока в установившемся режиме от значения UЗТ /КiRш составляет 0,055 А, что согласуется с формулой (25).

Рис. 11.
На рис. 12 представлен аналогичный процесс для случая λ = -1 (KPТ = 2 α L/[КiR ш (2Uн-E)] = 71,5, æK+L = 8×10-6). Из рис. 12 видно, что сразу после вхождения процесса в линейную зону устанавливаются субгармонические колебания половинной частоты, как это и следует из графического анализа разностного уравнения (рис. 5).

Рис. 12
Процесс, представленный на рис. 13, соответствует случаю λ = -1,5 (KPT= 2,5α L/[КiRш (2,5Uн— 1,5E)] = 357,5, æ K+L = 1,6×10-6). Как видно из рис. 13, показанный отрезок процесса далек от установившегося режима и сопровождается значительно возросшими пульсациями, носящими хаотический характер. Ответ на вопрос, останется процесс хаотическим или установятся периодические субгармонические автоколебания, требует дополнительных исследований, но имеет чисто теоретическое значение, поскольку оба этих режима должны быть исключены при расчете контура.

Рис. 13.
Выводы
- При нарушении условий устойчивости желательного установившегося режима в контуре регулирования тока наблюдаются нежелательные колебательные режимы с частотой, меньшей частоты коммутации.
- Для устойчивости желательного установившегося режима достаточно обеспечить параметр λ разностного уравнения контура большим -1. При относительной длительности импульсов γ, меньшей 0,5, это условие всегда выполняется.
- Оптимальным по быстродействию контура регулирования тока при его работе в линейной зоне является значение λ = 0.
- Постоянная составляющая установившегося тока контура, рассчитанная по его непрерывной модели, больше реальной на половину размаха пульсаций тока.
- Коршунов А. И. Динамический расчет стабилизированного понижающего преобразователя постоянного тока // Силовая электроника. 2005. № 3.
 25 декабря, 2019
25 декабря, 2019