
Организация параллельной работы источников питания переменного тока
Распределение тока нагрузки между ИБП
Для того чтобы два или более ИБП с двойным преобразованием энергии, включенные на общую нагрузку, были загружены в равной степени, необходимо синхронизировать их выходные напряжения по частоте, начальной фазе и амплитуде. Поддержание амплитудного и, как следствие, действующего значения выходного напряжения в современных ИБП обеспечивается с высокой точностью (±1%) этого параметра и в наименьшей степени влияет на дисбаланс распределения общей мощности между параллельно включенными источниками бесперебойного питания. В значительной степени равномерное распределение мощности нагрузки между ИБП зависит от фазовых углов выходных напряжений, что в свою очередь определяется не синхронностью выходных частот ИБП. Различие всего в 1 электрический градус между фазами напряжений на выходе двух ИБП может привести к дисбалансу распределения потребляемой мощности до 50%. Если выходное напряжение одного ИБП сдвигается вперед по фазе, то он принимает на себя большую часть мощности общей для двух ИБП нагрузки. При равенстве амплитуд выходного напряжения это означает возрастание тока, потребляемого от этого ИБП. Чтобы сбалансировать уровень энергии между двумя ИБП, необходимо уменьшить частоту выходного напряжения опережающего по фазе ИБП. В современных устройствах эта корректировка может осуществляться со скоростью 0,1–1,0 Гц/с. Рассмотрим возможные способы организации параллельной работы ИБП.
Централизованный принцип
Централизованный принцип представляет собой подчиненное управление ведущим ИБП нескольких ведомых, выходные частоты которых синхронизируются ведущим по выделенному интерфейсу параллельной работы (принцип Master/Slaves). При этом различают подчинение постоянное или переменное во времени.
Постоянное подчинение характеризуется тем, что один из ИБП назначается постоянно ведущим и отсутствует его резервирование. При выходе его из строя вся система оказывается неработоспособной [1]. Такой способ управления может быть использован только для наращивания мощности системы. Другим примером постоянно подчиненного управления несколькими силовыми модулями ИБП для организации их параллельной работы является многомодульный принцип построения ИБП с выделенным модулем системного управления [2]. Последний предназначен для получения, обработки информации о состоянии и режиме работы силовых модулей, их синхронизации и аварийного отключения. Для повышения надежности системы возможно использование основного и резервного модулей системного управления, образующих спаренную систему управления. При выходе из строя основного модуля управления резервный принимает на себя полностью или частично функции управления системой.
Переменное во времени подчинение — это приоритетный способ управления, когда ведущему ИБП присваивается высший ранг и он осуществляет синхронизацию ведомых ИБП, аналогично постоянному подчинению. Однако при выходе его из строя маркер приоритета передается следующему назначенному по рангу ИБП и т. д. Такой способ нашел широкое применение при организации параллельного включения трехфазных ИБП.
Децентрализованный принцип
Децентрализованный (распределенный) принцип организации параллельной работы ИБП наиболее надежен для построения резервируемой системы бесперебойного питания.
В этом случае все абоненты (ИБП) являются потенциальными контроллерами канала обмена информацией или осуществляют саморегулирование по адаптивному принципу при отсутствии межмодульного интерфейса.
Адаптивный принцип
Адаптивный алгоритм управления инверторами обеспечивает синхронизацию двух ИБП при отсутствии дополнительных интерфейсных каналов связи между ними. Каждый ИБП следит только за своим состоянием и при необходимости корректирует свою частоту. Такой принцип устраняет необходимость идентификации конкретного отказавшего ИБП на уровне системы и не требует применения межмодульного интерфейса. Каждый ИБП отслеживает собственное выходное напряжение так, чтобы его фаза совпадала с фазой другого ИБП. В случае внезапных изменений нагрузки оба ИБП испытают влияние возможной нестабильности и выполнят корректировку частоты. Критерием подстройки частоты может являться знак приращения выходной мощности ИБП. Алгоритм управления инвертором с использованием цифрового сигнального процессора (DSP) заключается в том, что отслеживаются изменения выходного напряжения и тока относительно данных их предыдущих замеров. Опрос осуществляется с частотой 3 кГц [6]. Данные о напряжении и токе сохраняются за последние пять тактов опроса. Усредненные значения на этих пяти тактах Uвых, Iвых сравниваются с текущими значениями Un, In. На основании этой информации микроконтроллер вычисляет приращения dU = Un – Uвых, dI = In – Iвых. Величина и знак произведения dUdI, представляющего изменение потребляемой мощности, определяют, должен ли ИБП продолжить работу в нормальном режиме, скорректировать выходную частоту или быть отключенным из-за неисправности.
Исправный ИБП при изменяющейся нагрузке, анализируя знаки dU, dI, определяет, что знак произведения dUdI всегда отрицательный. Действительно, с увеличением нагрузки Un уменьшается, In возрастает и, следовательно, dUdI ≤ 0. С уменьшением нагрузки dU увеличивается, dI уменьшается и, следовательно, dUdI ≤ 0. Таким образом, ИБП регистрирует отрицательные значения произведения dUdI, что свидетельствует о его нормальном функционировании. Если произведение dUdI по модулю увеличивается, то ИБП воспринимает это так, что фаза его выходного напряжения опережает фазу другого ИБП, и система управления уменьшит частоту инвертора, чтобы скомпенсировать эту разницу.
В случае неисправности ИБП значения dU, dI будут иметь один знак и произведение dUdI становится положительным независимо от величины нагрузки. В этом случае ИБП выключает свой инвертор и с помощью автоматического выключателя дополнительного шкафа коммутации отключается от общей шины нагрузки.
Адаптивный алгоритм управления может обеспечить синхронизацию только двух ИБП при возможности балансировки выходных токов ИБП в пределах 4%.
Демократический принцип
Другой реализацией децентрализованного способа организации параллельной работы ИБП является демократический принцип [3]. При таком способе каждый ИБП остается активным в регулировании своего выходного тока, корректируя его таким образом, чтобы приблизить к среднему значению Iср = Iн / n, где Iн — ток нагрузки, n = N + X — общее число параллельно включенных ИБП, N — минимальное количество ИБП, необходимых для функционирования системы по мощностным показателям, Х — количество резервных ИБП.
Рассмотрим более подробно реализацию демократического принципа на примере организации параллельной работы однофазных ИБП с двойным преобразованием энергии в диапазоне мощностей каждого ИБП от 6 до 20 кВА [4]. Примерами таких моделей ИБП являются GXT (Liebert), ИДП («Элекромаш») и др.
Функциональная схема ИБП приведена на рис. 1. В состав силовой цепи ИБП входят: сетевой фильтр (СФ), выпрямитель (В), бустер (Б) — повышающий преобразователь постоянного напряжения, ШИМ-инвертор (И), фильтр высших гармоник (ФВГ), блок реле (БР), тиристоры цепи байпас (ТБ), выходной фильтр (ВФ), выходное реле (ВР), зарядное устройство (ЗУ), аккумуляторная батарея (АБ), тиристор подключения АБ (ТА), реле подключения АБ (РА). Сетевой и выходной фильтры обеспечивают подавление выбросов сетевого напряжения при переходных процессах и осуществляют фильтрацию высокочастотных коммутационных помех. ШИМ-инвертор питается высоковольтным напряжением постоянного тока (700 В) с выхода бустера и выполняется по полумостовой бестрансформаторной схеме на IGBT-транзисторах. Силовые транзисторы управляются высокочастотными (19,2 кГц) ШИМ-сигналами с платы управления. Широтно-импульсная модуляция сигналов осуществляется по синусоидальному закону, что обеспечивает c помощью быстродействующей системы управления инвертором высокую точность выходного напряжения. Синусоидальное выходное напряжение 50 Гц формируется из высокочастотных ШИМ-импульсов с помощью L – С фильтра высших гармоник (ФВГ). Блок реле (БР) и тиристоры цепи байпас (ТБ) осуществляют автоматическое переключение нагрузки напрямую в сеть в случае перегрузки, перегрева или выхода из строя одного из узлов ИБП. Тиристор подключения АБ (ТА) и реле подключения АБ (РА) обеспечивают подключение АБ на вход бустера в автономном режиме работы ИБП.
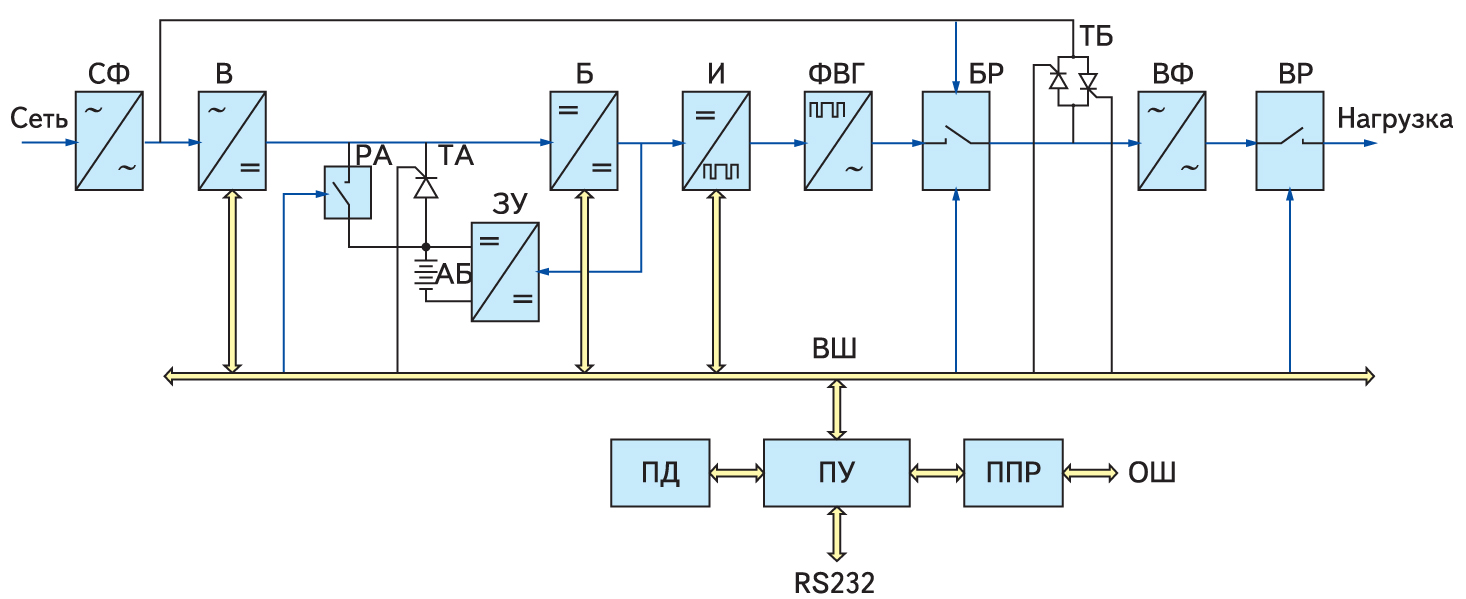
Рис. 1. Функциональная схема ИБП
Плата управления (ПУ) обеспечивает необходимый алгоритм работы узлов силовой платы, тестирование состояния, мониторинг и управление ИБП. Все цепи платы управления изолированы от высоковольтного напряжения, присутствующего на силовой плате. Внутрисистемная шина (ВШ) осуществляет связь между платой управления (ПУ) и узлами силовой платы ИБП. Сигналы с платы управления поступают также на плату дисплея (ПД), RS-232 интерфейс и плату параллельной работы ИБП (ППР). Плата дисплея содержит ряд светодиодов для индикации режимов работы ИБП и кнопки включения/выключения инвертора силовой платы. В некоторых моделях ИБП используются ЖК-дисплеи для отображения электрических параметров и состояния ИБП.
Рассмотрим более подробно состав и функциональное назначение плат управления и параллельной работы ИБП.
Плата управления ИБП обеспечивает:
- необходимый алгоритм работы силовых каскадов ИБП (выпрямителя, бустера, инвертора, статического байпаса, блока реле, зарядного устройства) в различных режимах работы (сетевом, автономном, байпасе, режиме холодного старта);
- обработку и анализ аналоговых сигналов измерения электрических параметров системы;
- связь с персональным компьютером по RS-232 интерфейсу и обмен информацией с SNMP-адаптером;
- организацию обмена данными по CAN-интерфейсу с другими ИБП при их параллельной работе;
- вывод на плату дисплея сигналов информации о режиме работы ИБП, степени его загрузки, разряженности аккумуляторной батареи (АБ) и возможном аварийном состоянии ИБП.
Для выполнения указанных функций плата управления (ПУ) содержит основной микроконтроллер (МК1), вспомогательный микроконтроллер (МК2) и аналоговую часть — обвязку для сопряжения входов/выходов основного микроконтроллера (масштабирование, преобразование) с измерительными цепями и цепями управления силовых каскадов ИБП. В качестве микроконтроллера МК1 выбран цифровой сигнальный процессор (DSP) TMS320LF2406A (Texas Instruments) [6], сочетающий высокую эффективность, широкий спектр выполняемых функций и достаточно низкую стоимость. Он обладает системой команд, рассчитанных на решение задач управления в реальном масштабе времени, и мощным набором периферийных устройств и интерфейсов (CAN, SCI, SPI), ориентированных на работу в распределенных системах управления, каковой является система бесперебойного питания с параллельной работой ИБП.
Другими отличительными признаками выбранного микроконтроллера (МК1) являются:
- Наличие двух модулей управления событиями (менеджеры событий), каждый из которых имеет:
- два 16-разрядных таймера общего назначения;
- восемь 16-разрядных каналов сравнения / ШИМ;
- три модуля захвата внешних событий для ввода и временной «оцифровки» импульсных сигналов;
- блок синхронизации запуска АЦП по периоду ШИМ.
- Наличие 10-разрядного 16-канального АЦП с минимальным временем преобразования 0,5 мкс на один канал, включая время выборки.
- Обеспечение до 40 индивидуальных программируемых портов ввода/вывода.
- Пять входов внешних запросов прерываний.
- Низкое потребление энергии при источнике питания 3,3 В.
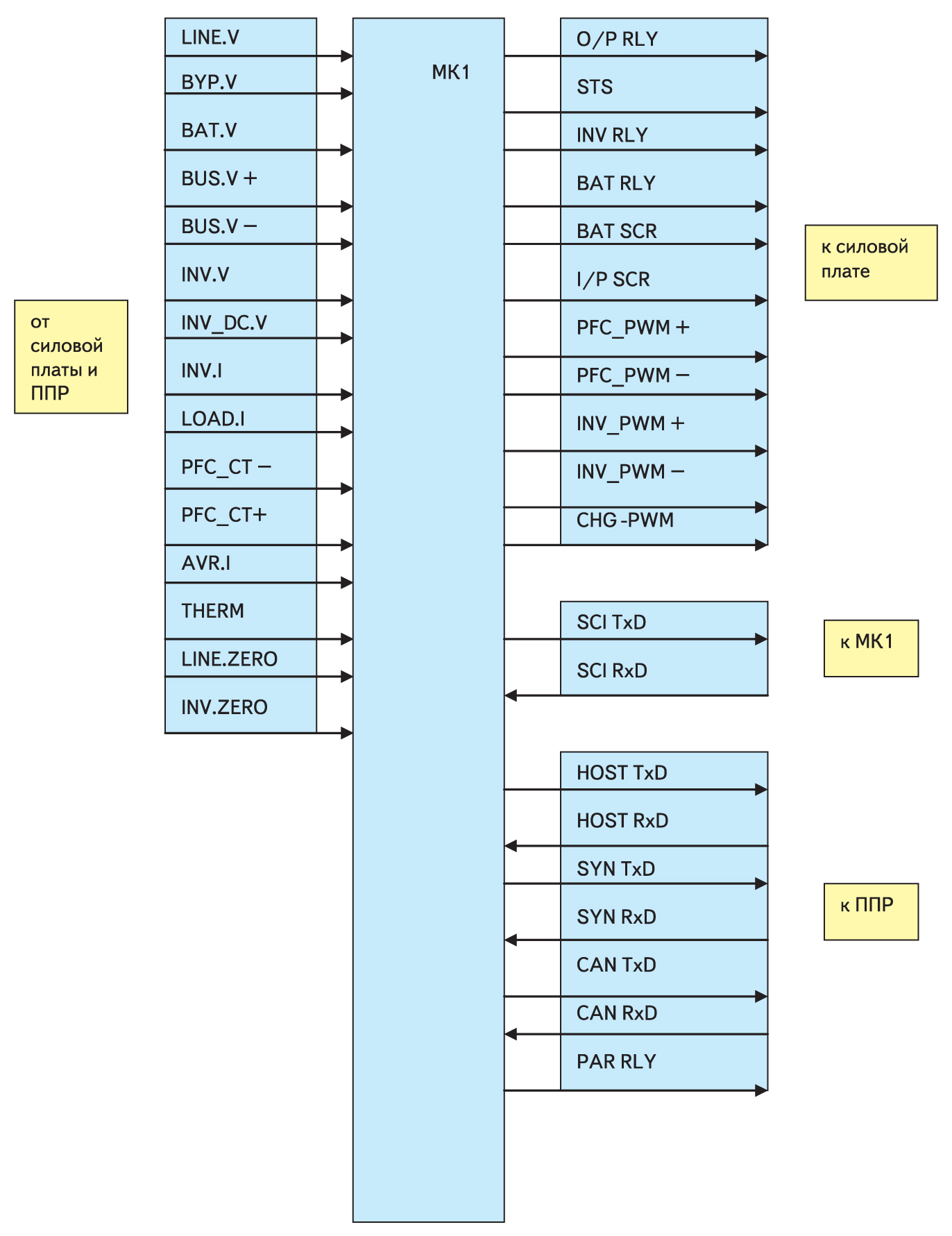
Рис. 2. Обозначения входных и выходных сигналов МК1
Наличие встроенных модулей генераторов периодических сигналов ШИМ обеспечивает современные алгоритмы непосредственного управления IGBT-транзисторами инвертора и бустера ИБП. МК1 решает основную задачу формирования алгоритма управления силовыми каскадами ИБП и обеспечения параллельной работы нескольких ИБП на общую нагрузку. На входы МК1 поступают сигналы напряжений и токов различных узлов силовой цепи ИБП (таблица 1, рис. 2).
|
Аналоговые входные сигналы параметров системы |
Обозначение |
|
Напряжение цепи Bypass |
BYP.V |
|
Напряжение АБ |
BAT.V |
|
Положительное напряжение высоковольтной шины |
BUS.V+ |
|
Отрицательное напряжение высоковольтной шины |
BUS.V– |
|
Сигнал датчика температуры |
THERMAL |
|
Фазное напряжение сети |
LINE.V |
|
Выходное напряжение инвертора |
INV.V |
|
Постоянная составляющая напряжения инвертора |
INVDC.V |
|
Ток инвертора |
INV.I |
|
Выходной ток ИБП |
LOAD.I |
|
Ток верхнего плеча ККМ |
PFC-CT |
|
Ток нижнего плеча ККМ |
PFC+CT |
|
Средний ток при параллельном включении ИБП |
AVR.I |
|
Цифровые входные сигналы напряжений |
|
|
Частота / фаза напряжения сети |
LINE. ZERO |
|
Частота / фаза напряжения инвертора |
INV. ZERO |
В таблице 2 приведены выходные сигналы управления узлами ИБП.
|
Выходные сигналы управления ИБП |
Обозначение |
|
Сигнал включения выходного реле |
O/P RLY |
|
Сигнал включения тиристоров цепи байпас |
INV- STS |
|
Сигнал включения реле инвертора |
INV.RLY |
|
Сигнал включения реле цепи АБ |
BAT.RLY |
|
Сигнал включения тиристора цепи АБ |
BAT.SCR |
|
Сигнал включения тиристоров выпрямителя |
I/P SCR |
|
Сигнал включения реле на плате параллельной работы |
PAR.RLY |
|
Сигнал управления транзистором нижнего плеча ККМ |
PFC PW- |
|
Сигнал управления транзистором верхнего плеча ККМ |
PFC PW+ |
|
Сигнал управления транзистором нижнего плеча инвертора |
INV PWM– |
|
Сигнал управления транзистором верхнего плеча инвертора |
INV PWM+ |
Наличие интегрированного на кристалле МК1 периферийного устройства — контроллера CAN-интерфейса — позволяет объединить несколько систем управления ИБП в локальную сеть для организации обмена информацией при параллельной работе ИБП. Ведущий в данный момент CAN-контроллер (HOST) может обмениваться с ведомыми CAN-контроллерами других ИБП по межмодульному интерфейсу. СAN-интерфейс обеспечивает пересылку данных с высокой скоростью (до 1 мбит/с), надежный контроль достоверности передачи информации за счет быстродействующей интеллектуальной системы обнаружения ошибок. Аппаратная реализация протокола обмена дает возможность работать с содержимым «почтовых ящиков» без осложнений обстоятельств прохождения информации по физическим каналам связи.
В таблице 3 приведены наименования интерфейсных сигналов системы.
|
Интерфейсные сигналы системы |
Обозначение |
|
Сигнал захвата передачи данных |
HOST TxD |
|
Сигнал захвата приема данных |
HOST RxD |
|
Сигнал синхронизации передачи |
SYN TxD |
|
Сигнал синхронизации приема |
SYN RxD |
|
Сигнал передатчика SCI интерфейса обмена данными с МК2 |
SCI TxD |
|
Сигнал приемника SCI интерфейса обмена данными с МК2 |
SCI RxD |
|
Сигнал приема данных из ОШ |
CAN RхТ |
|
Сигнал передачи данных в ОШ |
CAN TхD |
|
Сигнал внешнего прерывания |
RESET |
В качестве вспомогательного микропроцессора МК2 выбран MC68HC908MR32 (Motorola) [7]. МК2 решает задачи индикации на дисплее ИБП его режимов работы, состояния загрузки, остаточной емкости аккумуляторной батареи, аварийного состоянии ИБП. Кроме этого, МК2 осуществляет контроль работы вентиляторов, обмен информацией по RS-232 интерфейсу с ПК или с SNMP-адаптером, оперативное управление включением и выключением инвертора. Обмен информацией между МК1 и МК2 осуществляется по последовательному коммуникационному интерфейсу SCI, обеспечивающему высокоскоростную асинхронную связь.
Мультиплексный канал информационного обмена
В качестве физической среды передачи сигналов по общей шине мультиплексного канала информационного обмена между ИБП используется многожильный плоский кабель с волновым сопротивлением 120 Ом [5]. Для исключения отражения сигнала в шине необходимо обеспечить согласование значений эквивалентного нагрузочного сопротивления шины и соответствующего волнового сопротивления кабеля. Рекомендуемая длина интерфейсного кабеля для подключения двух портов мультиплексного канала информационного обмена ИБП не должна превышать 3 м.
Общая шина состоит из четырех двухпроводных каналов: трех цифровых и одного аналогового. По цифровым каналам передаются сигналы: HOST — приоритет (захват магистрали), SYN — синхронизация и CAN — прием/передача данных о состоянии ИБП (рис. 3).

Рис. 3. Мультиплексный канал информационного обмена между ИБП
По аналоговому каналу осуществляется передача с трансформаторов тока (ТТ) сигналов, пропорциональных выходным токам (In) каждого ИБП. Выходные обмотки ТТ и их нагрузочные сопротивления Rт подключены через ограничительные сопротивления Ro к двухпроводной обшей шине аналогового канала межмодульного интерфейса (рис. 4).
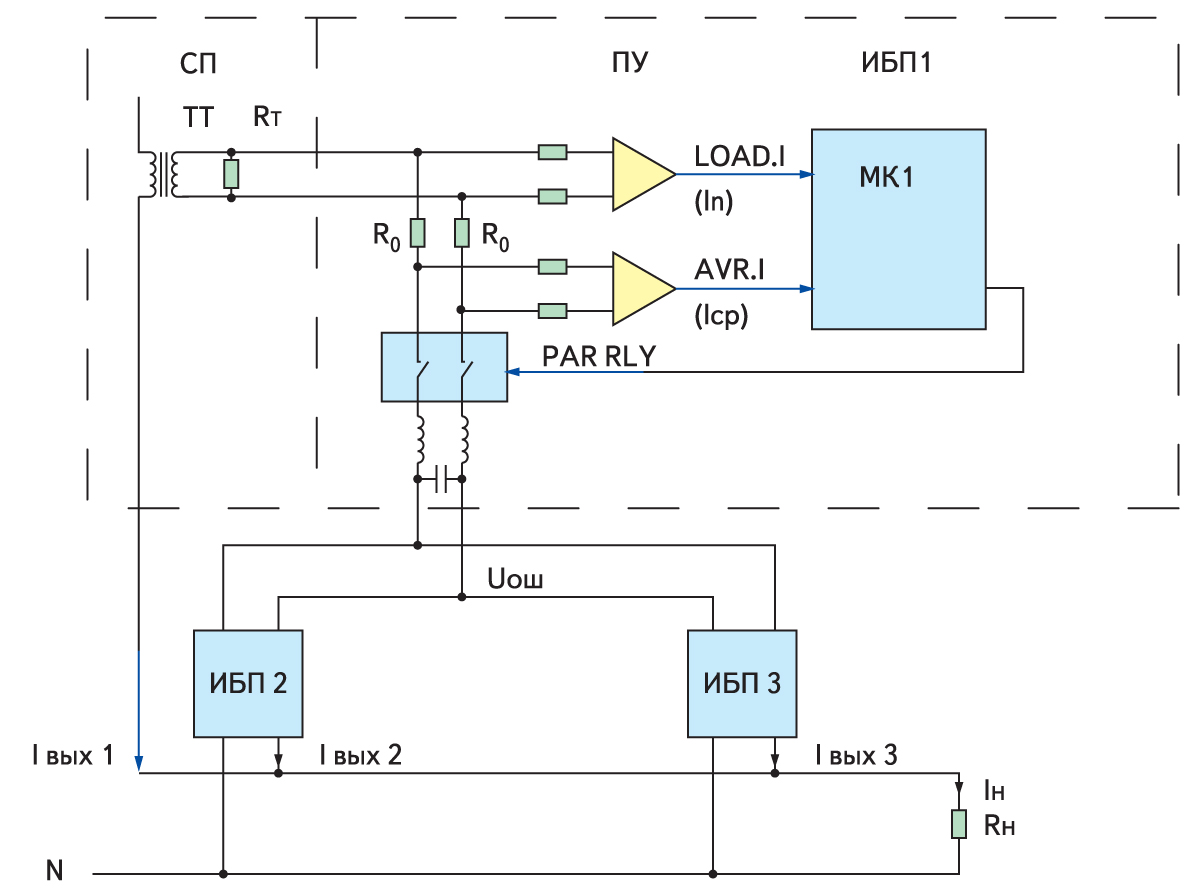
Рис. 4. Схема подключения аналогового канала интерфейса ИБП к общей шине (ОШ)
На общей шине возникает напряжение, пропорциональное среднему значению выходных токов ИБП (Iср).
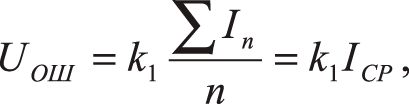
где k1 — коэффициент пропорциональности; n — число параллельно включенных ИБП.
Напряжение Uош поступает на соответствующий вход АЦП МК1 через аналоговый модуль формирования сигнала AVR.I (Iср) на плате управления каждого ИБП (рис. 4). На другой вход АЦП МК1 приходит сигнал LOAD.I, пропорциональный выходному току данного ИБП (In). В результате сравнения In и Iср МК1 принимает решение об изменении частоты инвертора, что сдвигает фазу выходного напряжения и выравнивает ток ИБП (In) до значения Iср. Погрешность измерения и разброс параметров элементов цепей обработки и масштабирования сигналов In, Iср определяют возможную точность распределения нагрузки между ИБП при параллельной работе, которая достигает 4–6%. Рекомендуемое количество параллельно включаемых ИБП не должно превышать 4.
Плата интерфейса параллельной работы ИБП является согласующим устройством, связывающим общую шину мультиплексного канала с МК1 платы управления. Плата параллельной работы (ППР) обеспечивает:
- гальваническую развязку абонентов от линии передачи информации — общей шины (ОШ) за счет использования оптронных пар;
- согласование уровней сигналов, передаваемых и принимаемых из ОШ.
Функциональная схема ППР приведена на рис. 5. ППР содержит четыре формирователя интерфейсных сигналов мультиплексного канала.

Рис. 5. Функциональная схема ППР
CAN-приемо-передатчик (типа SN65HVD230) обеспечивает согласование абонента с ОШ по уровню сигнала и вносимому сопротивлению и обеспечивает обмен данными между ОШ и МК1 ИБП. Цифровой формирователь сигналов синхронизации SYN передает в ОШ синхроимпульсы чтения и передачи данных. Формирователь сигналов захвата магистрали в данный период времени HOST обеспечивает приоритет одного из ИБП по обмену информации с другими ИБП. Аналоговый формирователь сигналов, пропорциональных выходному току ИБП (O/P I), содержит реле подключения канала к ОШ и L-C фильтр для помехозащищенности канала. При первоначальном включении системы подключение к ОШ трансформатора тока очередного ИБП происходит с помощью реле по сигналу PAR RLY, вырабатываемому МК1 при условии синхронизации выходной частоты данного ИБП с другими ИБП.
Включение параллельной системы ИБП осуществляется поочередным включением каждого ИБП сетевым автоматом в режим байпас. Когда последний ИБП после самотестирования войдет в этот режим, ИБП поочередно переводятся в инверторный режим. После выполнения условий синхронизации ИБП МК1 формирует сигнал включения выходного реле (ВР), подключающего ИБП к шине нагрузки (рис. 3). После выхода всех ИБП в инверторный режим подключается нагрузка. Наличие выходного реле в каждом устройстве позволяет отключить его в случае неисправности от общей шины нагрузки, обеспечивая тем самым работоспособность всей системы с остальными ИБП.
- Климов В. П. Тенденции развития UPS // Банковские системы и оборудование. 1994. № 3.
- Климов В. П., Кулашова А. В., Портнов А. А., Синяков В. В. Многомодульный принцип построения однофазных источников бесперебойного питания // Практическая силовая электроника. 2003. № 9.
- Герасимов А. А., Кастров М. Ю., Лукин А. В. Принудительное распределение тока в резервированных системах электропитания // Практическая силовая электроника. 2002. № 7.
- Климов В., Климова С., Портнов А. ИБП с двойным преобразованием энергии малой и средней мощности: схемотехника и технические характеристики // Электронные компоненты. 2004. № 6.
- Климов В. П. Проектирование бортовых мультиплексных каналов информационного обмена. М.: Издательство МАИ, 1993.
- Powerware Plus Parallel Redundant System – Hot Sync.
- Data Sheet TMS320LF24xxA DSP, Texas Instruments.
- Data Sheet MC68HC908MR32, Motorola.
 13 января, 2022
13 января, 2022 23 февраля, 2022
23 февраля, 2022 11 октября, 2023
11 октября, 2023